
Abstract
This paper studies the fractional optimal control problems (FOCPs) with inequality constraints. Using the Caputo definition, an optimization method based on a set of basis functions, namely the fractional-order Bernoulli wavelet functions (F-BWFs), is proposed. The solution is expanded in terms of the F-BWFs with unknown coefficients. In the first step, we convert the inequality conditions to equality conditions. In the second step, we use the operational matrix (OM) of fractional integration and the product OM of F-BWFs, with the help of the Lagrange multipliers technique for converting the FOCPs into an easier one, described by a system of nonlinear algebraic equations. Finally, for illustrating the efficiency and accuracy of the proposed technique, several numerical examples are analysed and the results compared with the analytical or the approximate solutions obtained by other techniques.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Fractional differential equations (FDEs) occur in the modelling of many phenomena in various fields of science and engineering. Several studies by some researchers (Bagley and Torvik 1985; Kulish and Lage 2002; Oldham 2010; Dahaghin and Hassani 2017; Bhrawy and Zaky 2017; Parsa Moghaddam and Tenreiro Machado 2017; Karamali et al. 2018; Hassani and Naraghirad 2019; Hassani et al. 2019a; Heydari et al. 2019) have shown that many complex physical and engineering problems can be described with great success via FDEs. We refer the interested reader to refer (Tenreiro Machado et al. 2011) for a historical perspective on fractional calculus. Most of FDEs do not have analytic solutions, so approximate and numerical techniques must be used. Several analytical and numerical methods to solve FDEs have been given such as extrapolation method (Diethelm and Walz 1997), Predictor-Corrector method (Diethelm et al. 2002), Adomian decomposition method (Elsayed and Gaber 2006), multistep method (Galeone and Garrappa 2006), Homotopy perturbation method (Odibat et al. 2010), linear B-spline method (Lakestani et al. 2012), product integration method (Garrappa and Popolizio 2012) and wavelets method (Rehman and Khan 2011; Heydari et al. 2013).
Optimal control theory is a branch of optimization theory concerned with minimizing a cost or maximizing a pay-off. Optimal control theory has various applications in sciences, engineering, and industry. Several studies have been conducted by some researchers on the optimal control problems (Swan 1990; Martin 1992; Feichtinger et al. 1994; Howlett 2000; Vittek et al. 2017; Kheiri Sarabi et al. 2017; Liu et al. 2019). Despite the fact that the optimal control theory has been under development for years, the fractional optimal control theory is a new area in mathematics. Fractional optimal control problems (FOCPs) can be defined with respect to different definitions of fractional derivatives, like the Riemann–Liouville and Caputo fractional derivatives as the most important ones (Agrawal 2004). Yousefi et al. (2011) applied the Legendre multiwavelet basis with the aid of a collocation method to obtain the approximate solution for the FOCPs. Alipour et al. (2013) proposed a technique based on Bernstein polynomials OM for multi-dimensional FOCPs. An application of the Ritz method and polynomials OM in solving FOCPs were investigated in (Nemati and Yousefi 2016; Nemati et al. 2016). Sabouri et al. (2017) applied a neural network for the solution of a class of FOCPs. Zaky and Tenreiro Machado (2017) derived an analytical and numerical approach for an unconstrained convex distributed-order FOCPs. Behroozifar and Habibi (2018) tried Bernoulli polynomials for the approximate solution of FOCPs. Rahimkhani and Ordokhani (2018) introduced a numerical technique based on Müntz-Legendre wavelets for 2D FOCPs. Rahimkhani and Ordokhani (2019) implemented the generalized fractional-order Bernoulli–Legendre functions for solving 2D-FOCPs. The interested reader can refer to (Keshavarz et al. 2015; Safaie et al. 2015; Soradi Zeid et al. 2016; Rahimkhani et al. 2016; Mirinejad and Inanc 2017; Rabiei et al. 2017; Zahra and Hikal 2017; Haber and Verhaegen 2018; Heydari 2018; Mashayekhi and Razzaghi 2018; Hassani et al. 2019b; Heydari 2019; Li et al. 2019; Lotfi 2019; Olivier and Pouchol 2019; Rabiei and Parand 2019; Treanţă 2019) for some works on FOCPs.
The main purpose of this paper is to propose an optimization method based on the fractional-order Bernoulli wavelet functions (F-BWFs) for the following FOCPs
subject to the fractional dynamical system and inequality constraints

and the initial conditions
where \(x_{j}\) for \(j=0, 1, \ldots , \lceil \nu \rceil \) are real constants, \({\mathcal {F}}\) and \(\mathcal {G}\) are continuous functions and
 denotes the fractional derivative of order \(\nu \) in the Caputo sense of x(t).
denotes the fractional derivative of order \(\nu \) in the Caputo sense of x(t).
Hereafter, an optimization method based on the F-BWFs is introduced, new OM of fractional integration and the product OM are constructed, and a numerical scheme to solve Eqs. (1)–(3) is developed.
This paper is organized as follows. Section 2 presents the fundamental aspects of the fractional calculus and fractional-order Bernoulli wavelet functions. Section 3 develops the operational matrices of F-BWFs. Section 4 presents a numerical method based on the F-BWFs. Section 5 includes illustrative examples demonstrating the accuracy and efficiency of the present method. Finally, Sect. 6 summarizes the main conclusions.
2 Definitions and Mathematical Preliminaries
This section introduces the fractional calculus and reviews the F-BWFs.
Definition 1
The Caputo fractional derivative of order \(\nu \), when \(q-1< \nu < q\), of f(t) is defined by (Hassani et al. 2019a, b)

where \(q = [\nu ] + 1,\) that \([\nu ]\) denotes the integer part of \(\nu \) and \(\varGamma (\cdot )\) denotes the gamma function defined for \(z>0\) as
Definition 2
The Riemann–Liouville fractional integral operator of order \(\nu \) of f(t) is defined by (Rahimkhani and Ordokhani 2019)
The useful relation between the Riemann–Liouville operator and Caputo operator is given by the following expression (Rahimkhani and Ordokhani 2019)

where n is an integer, and \(f \in C_1^n\).
Also, it is worth noting that based on the definition of the fractional derivative in the Caputo sense as above, we have the following useful property (Hassani et al. 2019b)

where \(q-1<\nu \le q\).
2.1 Fractional-Order Bernoulli Wavelets
The fractional-order Bernoulli wavelets of order \(\alpha \), \(\psi _{n, m}^{\alpha },\)\(n=1, 2,\ldots , 2^{k-1}\), \(m=0, 1, \ldots , M\), on the interval [0,1) defined by (Rahimkhani et al. 2016)
that k can assume any positive integer and
where \(\beta _{m}(t)\) are Bernoulli polynomials of order m on [0, 1]. The Bernoulli polynomials of degree m, \(\beta _{m}(t)\), is defined by (Keshavarz et al. 2015)
where \(\beta _{i}\) are rational numbers called Bernoulli numbers which are obtained using the series expansion of trigonometric functions
The first few Bernoulli numbers are
with \(\beta _{2i+1}=0\), \(i=1, 2, \ldots \), and the first few Bernoulli polynomials are
2.2 The Functions Approximation
An arbitrary function f(t) which is square integrable in the interval [0, 1] can be expanded by F-BWFs as (Rahimkhani et al. 2016)
The infinite series in Eq. (11) is truncated to approximate f(t) in terms of the F-BWFs as
where T indicates transposition and the unknown vector C and \(\varPsi ^{\alpha }(t) \) are \(2^{k-1}(M+1)\) column vectors and given by
and
that \(\langle .,.\rangle \) denotes the inner product in \(L^2 [0,1]\).
3 The Operational Matrices
The main objective of this section is to derive the F-BWFs OM of fractional integration and product OM.
3.1 The Operational Matrix of Fractional Integration
The Riemann–Liouville fractional integral of the vector \(\varPsi ^{\alpha }(t)\) defined in Eq. (13) can be obtained as
where \(P^{(\nu , \alpha )}\) denotes the \(2^{k-1}(M+1)\times 2^{k-1}(M+1)\) dimensional OM for Riemann–Liouville fractional integration defined by
where
To illustrate the calculation procedure, we choose (\(\nu =1\), \(\alpha =\frac{3}{2}\), \(k=1\), \(M=2\)). Thus, we have
also by choosing (\(\nu =\alpha =\frac{3}{2}\), \(k=1\), \(M=2\)), we have
where
3.2 The Product Operational Matrix of F-BWFs
The product of two F-BWFs vectors satisfies in the following equation
where A is an arbitrary \((M+1)\times 1\) vector and \({\tilde{A}}\) is a \((M+1)\times (M+1)\) matrix. For obtaining \({\tilde{A}}\), we can approximate \(\varPsi ^{\alpha }(t)\varPsi ^{\alpha \text {T}}(t)A\) by \(\varPsi ^{\alpha }(t)\) as follows
where
and
Using Eq. (19) we obtain
where
So by considering
we have
or
therefore the OM of multiplication is obtained.
To illustrate the calculation procedure, we choose (\(k=1\), \(M=2\), \(\alpha =1\)).
Thus, we have
Also, by choosing (\(k=1\), \(M=2\), \(\alpha =3/2\)), we have
3.3 Convergence Analysis
The following theorems will be useful in subsequent results. Here, we assume \(D^{-1}=[d_{n,m}^{i,j}]\), \(\max|d_{n,m}^{i,j}|=M_{2}\).
Theorem 1
Suppose \(f\in L^{2}[0,1]\)be a continuous function and \(|f(t)|\le M_{1}\), \(\forall t\in [0,1]\)and \(f(t)\simeq \displaystyle \sum\nolimits_{n=1}^{2^{k-1}}\sum\nolimits_{m=0}^{M}\displaystyle c_{n, m}\psi _{n, m}^{\alpha }(t)\). Then, we have
where
Proof
Suppose that \(f^{*}(t)\) is approximate of f(t) by using F-BWFs. Then, using Eq. (12) we have
where \(C^T=F^T D^{-1}\). Then, we get
and
Here, by changing the variable \(2^{k-1}t^{\alpha }-i+1=x\), we achieve
We know that if \(|f(x)|\le M_{1}\), \(\forall x\in [0,1]\) then, \(\left|f(x^{\frac{1}{\alpha }})\right|\le M_{1}\) and using the following property of Bernoulli polynomials (Sahu and Saha Ray 2017)
we have
On the other hand, \(\max|d_{n,m}^{i,j}|=M_{2}\), so \(|d_{n,m}^{i,j}|\le M_{2}\). Considering the above discussion, we get the following relation
Theorem 2
Assume that \(f\in L^{2}[0,1]\)be a continuous function and \(|f(t)|\le M_{1}\), \(\forall t\in [0,1]\). If \(f^{*}(t)\)be the truncated F-BWFs expansion then, the norm of truncated error E(t) can be bounded as
where
Proof
Using Eq. (11) if \(f^{*}(t)\) be the truncated F-BWFs expansion, then the truncated error term can be computed as
then, we derive
Moreover, we have
By changing the variable \(2^{k-1}t^{\alpha }-n+1=x\), we get
Thus, using the above equation and Theorem 1, we have
where
4 Description of the Proposed Method
In this section, the F-BWFs expansion and their OM of fractional derivative are used together to solve the following FOCPs with inequality constraints

where x(t) and u(t) are state and control functions.
For do this, we expand
by the F-BWFs as

By integrating from order \(\nu \) on both sides of Eq. (28) with respect to t, considering Eq. (15) and the initial conditions expressed in Eq. (27), we get
where
and we suppose \(u(t)\simeq U^T \varPsi ^{\alpha }(t)\).
By substituting Eq. (29) and \(u(t)\simeq U^T \varPsi ^{\alpha }(t)\) in Eq. (27), our problem is converted to following problem
We convert the inequality constraint to the equality constraint by slack variables as
By expanding \(Z_{j}(t)\) by F-BWFs and using the product OM of F-BWFs Eq. (17), we have
Applying the above equations and removing \(\varPsi ^{\alpha }(t)\) from Eq. (30), we obtain
Now, by using the method of Lagrange multipliers method, we have
where the vectors \(\lambda \) and \(\delta _{j}\) are the unknown Lagrange multipliers of dimension \(2^{k-1}(M+1)\times 1\). Also, the necessary conditions for the extremum are given by following system
We can determine C and U by means of packages such as MATLAB, and we obtain the approximate solution of Eq. (27).
5 Illustrative Test Problems
In this section, some numerical examples are provided to demonstrate the efficiency and reliability of the proposed method. All the numerical computations have been done using MATLAB 2018a.
Example 1
Consider the following FOCP with inequality constraint described by (Lotfi 2019)

For this problem, the values \(x(t)=-t^{\frac{3}{2}}\) and \(u(t)=1-t^{\frac{3}{2}}\) are the minimizing solutions for the state and control variables, respectively, and the performance index \({\mathcal {J}}\) has the minimum value of \({\mathcal {J}}=-0.7\). Let

then
where C and U are unknown coefficient vectors to be calculated. By substituting Eq. (38) into Eq. (36), we have
subject
and also, we have \(x(t)\le 0\) and \(0\le u(t)\le 1\). Therefore, by using slack variables, we have
where \(s(t)=S^T\varPsi ^{\alpha }(t)\), \(z(t)=Z^T\varPsi ^{\alpha }(t)\), \( w(t)=W^T\varPsi ^{\alpha }(t)\), \(1=E^T\varPsi ^{\alpha }\) and S, Z and W are unknown coefficient vectors. Thus,
and
By removing \(\varPsi ^{\alpha }(t)\) from both side of Eq. (39), we have
Now Eq. (36) is converted to
To solve this problem, we use the proposed method with different values of k and M. Table 1 lists the values obtained for the performance index \({\mathcal {J}}\) with \(k=1\), \(M=1\) and \(k=1\), \(M=2\) for different values of \(\alpha \). In Table 2, the results for \({\mathcal {J}}\) of this paper and Epsilon penalty with Ritz method are compared. Table 3 contains the absolute errors in the state and control variables with \(k=1\) and \(M=1\). Figure 1 demonstrates the behaviour of the numerical solutions for the state variable x(t) and the control variable u(t) with \(k=1\), \( M = 2\) and \(\alpha =1\) and \(\alpha =\frac{3}{2}\). From Tables 1, 2, 3 and Fig. 1, we verify that the F-BWFs method provides approximate solutions with acceptable accuracy.

The behaviour of the approximate state and control variables x(t) and u(t) with \(k=1\), \( M=2\) and \(\alpha =1, \frac{3}{2}\) for Example 1
Example 2
Consider the following FOCP with inequality constraint described by (Kirk 1970)

For this problem, the performance index \({\mathcal {J}}\) has the minimum value of \({\mathcal {J}}=8.07054\) with \(\nu =1\). To solve this problem, we use the proposed method with different values of k and M. Figure 2 demonstrates behaviour of the state functions for different values of \(\nu \) with \(k= 3\), \(M = 2\) and \(\alpha =1\). In Table 4, we compared the results for \({\mathcal {J}}\) that \(\nu =\alpha =1\) of the proposed method with others methods. Table 5 shows the estimated value of \({\mathcal {J}}\) with different values of \(\nu \), \(\alpha \) and \(k = M = 2\). Table 6 shows estimated value of u(t) with \(\nu =\alpha =1\). From these tables and figure one can see that the F-BWFs method is efficient and accurate.

The behaviour of the approximate state variables \(x_{1}(t)\), \(x_{2}(t)\) for different values of \(\nu \) for Example 2 with \(k=3\), \(M=2\) and \(\alpha =1\)
Example 3
Consider the following FOCP with inequality constraint described by (Hager and Lanculescu 1984)

For this problem, the exact values for state and control variables x(t), u(t) are
and the performance index \({\mathcal {J}}\) has the minimum value of \({\mathcal {J}}=2\frac{55e^2-2e^{-5}}{48(e-1)^2}\simeq 5.5879556\) with \(\alpha =\nu =1\).
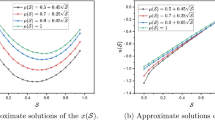
To solve this problem, similar to the previous examples, we use the proposed method with different values of K and M. Table 7 lists the values obtained for the performance index \({\mathcal {J}}\) with \(k=1\), \(M=1\) and \(k=1\), \(M=2\) for different values of \(\alpha \), \(\nu \). In Table 8, the results for \({\mathcal {J}}\) of this paper and other methods are compared. Figure 3 demonstrates the behaviour of the numerical solutions for the state variable x(t) and the control variable u(t) with \(k=2\), \( M = 2\) and \(\alpha =1\), for different values of \(\nu = 0.7, 0.8, 0.9, 1\).

The behaviour of the approximate state and control variables x(t) , u(t) for some different values of \(\nu \) for Example 3 with \(k=2\), \(M=2\)
Example 4
Consider the following FOCP with inequality constraint described by (Lotfi 2019)

For this problem, the exact solutions are \({\mathcal {J}}=-0.25\), \(x(t)=-t^{\frac{3}{2}}\), \(u(t)=\frac{1}{2}+\frac{1}{2}sin^2(t^{\frac{3}{2}})\). To solve this problem, we use the proposed method with different values for k and M. Table 9 lists the values obtained for the performance index \({\mathcal {J}}\) with \(k=1,2\), \(M=1,2\) for \(\alpha =1\) and \(\alpha =\frac{3}{2}\). Figure 4 demonstrates the behaviour of the numerical solutions for the state variable x(t) and the control variable u(t) with \(k=2\), \( M = 2\) and \(\alpha =1\) and \(\alpha =\frac{3}{2}\). From Table 9 and Fig. 4 we verify that the F-BWFs method provides approximate solutions with acceptable accuracy and we see the good effect of the fractional order \(\alpha \) for F-BWFs basis.

The behaviour of the approximate state and control variables x(t), u(t) for Example 4 with \(k=2\), \(M=2\) and \(\alpha =1, \frac{3}{2}\)
Example 5
Consider the following FOCP with inequality constraint

For this problem, the exact solutions with \(\nu =1\) are \({\mathcal {J}}=0\), \(x(t)=-t^{2}\), \(u(t)=t^{\frac{4}{3}}\). To solve this problem, we use the proposed method with different values for k and M. Table 10 shows the estimated value of \({\mathcal {J}}\) with \(\nu =1\) and different values of \(\alpha \), k and M. Table 11 shows the estimated value of \({\mathcal {J}}\) with \(\alpha =1\) and different values of \(\nu \), for \(k=3\), \(M=2\). Figure 5 demonstrates behaviour of the state variable x(t) and the control variable u(t) for different values of \(\nu \) with \(k= 3\), \(M = 2\) and \(\alpha =1\). From these tables and figure one can see that the F-BWFs method is efficient and accurate. In this exam, like the other examples, the effect of the fractional order of the used basis is visible.
Figure 5 shows the behaviour of the numerical solutions of the problem at \(k=3\), \(M = 2\), for different values of \(\nu = 0.7, 0.8, 0.9, 1\).

The behaviour of the approximate state and control variables x(t), u(t) for some different values of \(\nu \) for Example 5 with \(k=3\), \(M=2\) and \(\alpha =1\)
6 Conclusion
This paper introduced a new efficient numerical method based on the F-BWFs and the Lagrange multipliers for solving FOCPs with inequality constraint. The main idea consists of expanding the solution by means of F-BWFs. The FOCPs was successfully reduced to a system of algebraic equations using the F-BWFs basis, their operational matrices and Lagrange multipliers. From the numerical results, it is obvious that the proposed method provides better accuracy and efficiency than other methods.
References
Agrawal OP (2004) A general formulation and solution scheme for fractional optimal control problems. Nonlinear Dyn 38(1–4):323–337
Alipour M, Rostamy D, Baleanu D (2013) Solving multi-dimensional fractional optimal control problems with inequality constraint by Bernstein polynomials operational matrices. J Vib Control 19:2523–2540
Bagley RL, Torvik PJ (1985) Fractional calculus in the transient analysis of viscoelastically damped structures. J AIAA 23:918–925
Behroozifar M, Habibi N (2018) A numerical approach for solving a class of fractional optimal control problems via operational matrix Bernoulli polynomials. J Vib Control 24(12):2494–2511
Bhrawy AH, Zaky MA (2017) Highly accurate numerical schemes for multi-dimensional space variable-order fractional Schrödinger equations. Comput Math Appl 73(6):1100–1117
Dahaghin MS, Hassani H (2017) An optimization method based on the generalized polynomials for nonlinear variable-order time fractional diffusion-wave equation. Nonlinear Dyn 88(3):1587–1598
Diethelm K, Walz G (1997) Numerical solution of fractional order differential equations by extrapolation. Numer Algorithms 16:231–253
Diethelm K, Ford NJ, Freed AD (2002) A predictor-corrector approach for the numerical solution of fractional differential equations. Nonlinear Dyn 16:3–22
El-Kady M (2003) A Chebyshev finite difference method for solving a class of optimal control problems. Int J Comput Math 80:883–895
Elsayed A, Gaber M (2006) The adomian decomposition method for solving partial differential equations of fractional order in finite domains. Phys Lett A 359:175–182
Feichtinger G, Hartl RF, Sethi SP (1994) Dynamic optimal control models in advertising: recent developments. Manag Sci 40(2):195–226
Galeone L, Garrappa R (2006) On multistep methods for differential equations of fractional order. Mediterr J Math 3:565–580
Garrappa R, Popolizio M (2012) On accurate product integration rules for linear fractional differential equations. J Comput Appl Math 235:1085–1097
Haber A, Verhaegen M (2018) Sparsity preserving optimal control of discretized PDE systems. Comput Methods Appl Mech Eng 335:610–630
Hager WW, Lanculescu GD (1984) Dual approximations in optimal control. SIAM J Control Optim 22:423–465
Hassani H, Naraghirad E (2019) A new computational method based on optimization scheme for solving variable-order time fractional Burgers’ equation. Math Comput Simul 162:1–17
Hassani H, Avazzadeh Z, Tenreiro Machado JA (2019a) Numerical approach for solving variable-order space-time fractional telegraph equation using transcendental Bernstein series. Eng Comput. https://doi.org/10.1007/s00366-019-00736-x
Hassani H, Tenreiro Machado JA, Naraghirad E (2019b) Generalized shifted Chebyshev polynomials for fractional optimal control problems. Commun Nonlinear Sci Numer Simul 75:50–61
Heydari MH (2018) A new direct method based on the Chebyshev cardinal functions for variable-order fractional optimal control problems. J Franklin Inst 355(12):4970–4995
Heydari MH (2019) A direct method based on the Chebyshev polynomials for a new class of nonlinear variable-order fractional 2D optimal control problems. J Frankl Inst 356(15):8216–8236
Heydari MH, Hooshmandasl MR, Maalek Ghaini F, Fereidouni F (2013) Two-dimensional legendre wavelets for solving fractional poisson equation with dirichlet boundary conditions. Eng Anal Bound Elem 37(11):1331–1338
Heydari MH, Avazzadeh Z, Yang Y (2019) A computational method for solving variable-order fractional nonlinear diffusion-wave equation. Appl Math Comput 352:235–248
Howlett Ph (2000) The optimal control of a train. Ann Oper Res 98(1–4):65–87
Karamali G, Dehghan M, Abbaszadeh M (2018) Numerical solution of a time-fractional PDE in the electroanalytical chemistry by a local meshless method. Eng Comput 35:87–100
Keshavarz E, Ordokhani Y, Razzaghi M (2015) A numerical solution for fractional optimal control problems via Bernoulli polynomials. J Vib Control 22(18):3889–3903
Kheiri Sarabi B, Sharma M, Kaur D (2017) An optimal control based technique for generating desired vibrations in a structure. Iran J Sci Technol 41(3):219–228
Kirk DE (1970) Optimal control theory. Prentice Hall, Englewood Cliffs
Kulish VV, Lage JL (2002) Application of fractional calculus to fluid mechanics. J Fluids Eng 124:803–806
Lakestani M, Dehghan M, Irandoust-Pakchin S (2012) The construction of operational matrix of fractional derivatives using b-spline functions. Commun Nonlinear Sci Numer Simul 17:1149–1162
Li W, Wang S, Rehbock V (2019) Numerical solution of fractional optimal control. J Optim Theory Appl 180(2):556–573
Liu D, Liu L, Lu Y (2019) LQ-optimal control of boundary control systems. Iran J Sci Technol 2019:1–10
Lotfi A (2019) Epsilon penalty method combined with an extension of the Ritz method for solving a class of fractional optimal control problems with mixed inequality constraints. Appl Numer Math 135:497–509
Martin RB (1992) Optimal control drug scheduling of cancer chemotherapy. Automatica 28(6):1113–1123
Mashayekhi S, Razzaghi M (2018) An approximate method for solving fractional optimal control problems by hybrid functions. J Vib Control 24(9):1621–1631
Mashayekhi S, Ordokhani Y, Razzaghi M (2012) Hybrid functions approach for nonlinear constrained optimal control problems. Commun Nonlinear Sci Numer Simul 17:1831–1843
Mirinejad H, Inanc T (2017) An RBF collocation method for solving optimal control problems. Robot Auton Syst 87:219–225
Nemati A, Yousefi SA (2016) A numerical method for solving fractional optimal control problems using Ritz method. J Comput Nonlinear Dyn 11(5):051015 (7 pages)
Nemati A, Yousefi S, Soltanian F, Ardabili JS (2016) An efficient numerical solution of fractional optimal control problems by using the Ritz method and Bernstein operational matrix. Asian J Control 18(6):2272–2282
Odibat Z, Momani S, Xu H (2010) A reliable algorithm of homotopy analysis method for solving nonlinear fractional differential equations. Appl Math Model 34:593–600
Oldham KB (2010) Fractional differential equations in electrochemistry. Adv Eng Softw 41:9–12
Olivier A, Pouchol C (2019) Combination of direct methods and homotopy in numerical optimal control: application to the optimization of chemotherapy in cancer. J Optim Theory Appl 181(2):479–503
Ordokhani Y, Razzaghi M (2005) Linear quadratic optimal control problems with inequality constraints via rationalized Haar functions. DCDIS Ser B 12:761–73
Parsa Moghaddam B, Tenreiro Machado JA (2017) A stable three-level explicit spline finite difference scheme for a class of nonlinear time variable order fractional partial differential equations. Comput Math Appl 73(6):1262–1269
Rabiei K, Ordokhani Y (2018) Boubaker hybrid functions and their application to solve fractional optimal control and fractional variational problems. Appl Math 63:541–567
Rabiei K, Parand K (2019) Collocation method to solve inequality-constrained optimal control problems of arbitrary order. Eng Comput 2019:1–11
Rabiei K, Ordokhani Y, Babolian E (2017) The Boubaker polynomials and their application to solve fractional optimal control problems. Nonlinear Dyn 88(2):1013–1026
Rahimkhani P, Ordokhani Y (2018) Numerical solution a class of 2D fractional optimal control problems by using 2D Müntz-Legendre wavelets. Optim Control Appl Methods 39(6):1916–1934
Rahimkhani P, Ordokhani Y (2019) Generalized fractional-order Bernoulli–Legendre functions: an effective tool for solving two-dimensional fractional optimal control problems. IMA J Math Control Inf 36(1):185–212
Rahimkhani P, Ordokhani Y, Babolian E (2016) An efficient approximate method for solving delay fractional optimal control problems. Nonlinear Dyn 86(3):1649–1661
Rehman MU, Khan RA (2011) The legendre wavelet method for solving fractional differential equations. Commun Nonlinear Sci Numer Simul 16:4163–4173
Sabouri J, Effati S, Pakdaman M (2017) A neural network approach for solving a class of fractional optimal control problems. Neural Process Lett 45(1):59–74
Safaie E, Farahi MH, Farmani Ardehaie M (2015) An approximate method for numerically solving multi-dimensional delay fractional optimal control problems by Bernstein polynomials. Comput Appl Math 34(3):831–846
Sahu PK, Saha Ray S (2017) A new Bernoulli wavelet method for numerical solutions of nonlinear weakly singular Volterra integro-differential equations. Int J Comput Methods 14:1750022
Soradi Zeid S, Effati S, Kamyad AV (2016) Approximation methods for solving fractional optimal control problems. Comput Appl Math 37:158–182
Swan GW (1990) Role of optimal control theory in cancer chemotherapy. Math BioSci 101(2):237–284
Tenreiro Machado JA, Kiryakov V, Mainardi F (2011) Recent history of fractional calculus. Commun Nonlinear Sci Numer Simul 16(3):1140–1153
Treanţă S (2019) On a modified optimal control problem with first-order PDE constraints and the associated saddle-point optimality criterion. Eur J Control 2(180):556–573
Vittek J, Butko P, Ftorek B, Makyš P, Gorel L (2017) Energy near-optimal control strategies for industrial and traction drives with a.c. motors. Math Probl Eng 2017:1–22
Yousefi SA, Lotfi A, Dehghan M (2011) The use of a Legendre multiwavelet collocation method for solving the fractional optimal control problem. J Vib Control 17:2059–2065
Zahra WK, Hikal MM (2017) Non standard finite difference method for solving variable order fractional optimal control problems. J Vib Control 23(6):948–958
Zaky MA, Tenreiro Machado JA (2017) On the formulation and numerical simulation of distributed-order fractional optimal control problems. Commun Nonlinear Sci Numer Simul 52:177–189
Acknowledgements
The authors are very grateful to the reviewers for carefully reading the paper and for their comments and suggestions which have improved the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Valian, F., Ordokhani, Y. & Vali, M.A. Numerical Solution of Fractional Optimal Control Problems with Inequality Constraint Using the Fractional-Order Bernoulli Wavelet Functions. Iran J Sci Technol Trans Electr Eng 44, 1513–1528 (2020). https://doi.org/10.1007/s40998-020-00327-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40998-020-00327-3