
Abstract
In this study, we formulate a set of differential equations for a binary system to describe the secular-tidal evolution of orbital elements, rotational dynamics, and deformation (flattening), under the assumption that one body remains spherical while the other is slightly aspherical throughout the analysis. By applying singular perturbation theory, we analyze the dynamics of both the original and secular equations. Our findings indicate that the secular equations serve as a robust approximation for the entire system, often representing a slow-fast dynamical system. Additionally, we explore the geometric aspects of spin–orbit resonance capture, interpreting it as a manifestation of relaxation oscillations within singularly perturbed systems.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The foundations of differential equations trace back to Newton’s pioneering work in mechanics and differential calculus. Newton grounded the law of gravitation mathematically and solved the equations for the motion of two bodies. However, the Newtonian model primarily considers celestial bodies as point masses, a simplification that has its limitations given that celestial entities have finite dimensions.
Planets and substantial satellites exhibit a near-spherical shape. Despite being relatively minuscule compared to their respective diameters, the deformations induced by spin and tidal forces have a considerable impact, instigating significant alterations in both rotation rates and orbits. It is worth noting that all the major satellites within our solar system, including the Moon, operate in a 1:1 spin–orbit resonance (see, e.g., [36]), they complete a single rotation on their axis for every orbit around the planet. Mercury, however, maintains a 3:2 spin–orbit resonance, undergoing three rotations on its axis for every two revolutions around the Sun. Furthermore, a majority of these celestial entities follows elliptical orbits characterized by low eccentricity. Deciphering how this dynamic state was attained, along with determining the associated time scales, holds substantial significance in the scientific realm.
The goal of this study is to introduce equations to describe the perturbative impact of deformations on the motion of two spherical bodies influenced by gravitational interaction. Subsequently, we demonstrate that in certain limiting scenarios, which bear physical relevance, these equations can be analyzed using the mathematical apparatus of singular perturbations.
The earliest and most basic deformation model accounting for energy dissipation was put forth by George Darwin [8], son of the renowned biologist Charles Darwin. Darwin built upon previous studies [44] concerning the deformation of an elastic, homogeneous, incompressible sphere, extending the results to address a body constituted of a homogeneous, incompressible, viscous fluid.
Subsequent to Darwin, a significant advancement came with the introduction of Love numbers [31]. When the tidal force is decomposed in time via its Fourier components and in space through spherical-harmonic components, the Love number for a specific harmonic frequency and spherical-harmonic mode is a scalar that correlates the amplitude of the tidal force to the deformation’s amplitude. Essentially, Love numbers act as functions within the frequency space, offering a phenomenological approach to elucidate force-deformation relationships. Estimates of Love numbers can be derived from observational data.
Over the past 70 years, there has been a prolific output of scientific literature focusing on the tidal effects on the motion of celestial bodies. While it is challenging to encompass the breadth of these studies, we will mention a few we are particularly acquainted with.
Kaula [26] evaluated the rate of change of the orbital elements using Love numbers for each harmonic mode (see [3] and [10] for further insights on the work of Kaula). Numerous other scholars have investigated equations accounting for deformations averaged over orbital motion. Some important works in this area are: [25, 43, 1], and [34] (low-viscosity scenarios); and [5, 15, 17, 32] and [2, 18,19,20,21] (low and high-viscosity scenarios).
In this paper, for simplicity while maintaining physical relevance, we make the following assumptions:
- (1):
-
The first body is deformable, nearly spherical at all times;
- (2):
-
The second body, which is the tide-raising body, is a point mass;
- (3):
-
The spin (or rotation vector) of the deformable body remains perpendicular to the orbital plane.
The foundational equations for the orbit and rotation of the extended body are standard. Various equations exist in the literature detailing the deformation of extended bodies. We utilize the equations provided in Ragazzo and Ruiz [40], without the term accounting for the inertia of deformations [6].
The reduced and averaged equations we introduce here are not novel. Excluding centrifugal deformations, they match those in Correia and Valente [7]. Our analysis parallels the approach in Correia et al. [5], Section 5. The primary contributions of this paper include:
- (1):
-
Clearly stating mathematical assumptions used in deriving the averaged and reduced equations;
- (2):
-
Framing the averaged equations as a slow-fast system;
- (3):
-
Beginning a geometric examination of the slow system using numerically generated figures to illustrate the “relaxation jumps”.
We adopt the geometric method set out by Fenichel [11], Fenichel [12], Fenichel [13], Fenichel [14], and Krupa and Szmolyan [28] without fully verifying all the assumptions. A comprehensive mathematical analysis of the equations presented may necessitate extensive research.
The paper is structured as follows:
In Sect. 2, we outline the core equations of the system. We assess the magnitude of various terms and introduce a parameter representing the minor nature of the deformations.
In Sect. 3, we examine the limit when deformations approach zero, averaging them over orbital motion. This leads to equations with “passive deformations” that do not influence the orbit.
In Sect. 4, we suggest that for minor deformations, the primary equations possess an attracting invariant manifold matching the deformations from Sect. 3. This manifold’s existence depends on the body’s rheology. As the body becomes more viscous, the manifold becomes less attractiveFootnote 1. Given the enhanced spin–orbit coupling at high viscosity, assessing the credibility of our calculations and assumptions in this section presents a compelling mathematical challenge.
In Sect. 5, we average the orbital and spin equations based on the preceding section’s invariant manifold.
Section 6 reveals that the averaged equations exhibit a slow-fast split. The fast variable is the body’s spin, while the slower variables are orbital eccentricity and the semi-major axis.
In Sect. 7, we delineate a condition for the folding of the slow manifold and provide a numerical illustration of its geometry. We also present a geometric interpretation of the dynamics within this manifold, emphasizing rapid spin transitions as instances of “relaxation jumps” [28, 35].
Section 8 concludes the paper, recapping the pivotal mathematical queries regarding the simplification of the initial equations and the dynamics of the reduced equations.
This paper was written concurrently with a companion paper [41], which has a more physics-oriented content. The focus of Ragazzo and Ruiz [41] is on the implications for dynamics of using rheological models more complex than the one employed here.
2 The fundamental equations
Let \(m_0\) and m represent the masses of two celestial bodies, which could be a planet and a star, or a planet and a satellite, etc. The body with mass \(m_0\) is treated as a point mass, while the body with mass m is always a small deformation of a spherical body with a moment of inertia \({\,\mathrm I}_\circ\). We assume that the deformations do not alter the volume of the body, implying that \({\,\mathrm I}_\circ\) remains constant, a result attributed to Darwin [42]. Often, we will refer to the bodies simply as the point mass and the body.
For convenience, we write the deviatoric part of the moment of inertia matrix \(\textbf{I}\) in non-dimensional form:
where \(\textbf{1}\) is the identity and \(\textbf{b}\) is a symmetric and traceless matrix. We denote matrices and vectors in bold face. The matrix \(\textbf{b}\) is termed the deformation matrix.
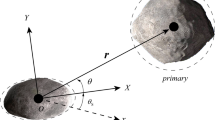
Consider an orthonormal frame \(\{\textbf{e}_1,\textbf{e}_2,\textbf{e}_3\}\). We assume that the vector \(\textbf{x}\), from the center of mass of the body to the point mass, lies in the plane spanned by \(\{\textbf{e}_1,\textbf{e}_2\}\). The angular velocity of the body, \(\varvec{\omega }\), is perpendicular to the orbital plane, represented as \(\varvec{\omega }=\omega \textbf{e}_3\). The deformation matrix is given by:
Under the given assumptions, Newton’s equation for the relative position is expressed as:
where it is assumed that in the region occupied by the body, the gravitational field of the point mass is accurately represented by its quadrupolar approximation.
The spin angular momentum of the body is denoted by \(\varvec{\ell }_s=\ell _s\textbf{e}_3\), with the index s representing spin, and is defined as:
In the context of the quadrupolar approximation, Euler’s equation for the variation of \(\ell _s\) is:
For a rigid body, a specific frame exists, known as the body frame, in which the body remains stationary and its angular momentum with respect to this frame is zero. Similarly, for a deformable body, there is an equivalent frame, called the Tisserand frame, where the body’s angular momentum is null. The orientation of the Tisserand frame \(\textrm{K}:= \{\textbf{e}_{T1}, \textbf{e}_{T2}, \textbf{e}_{T3}\}\) with respect to the inertial frame \(\kappa := \{\textbf{e}_{1}, \textbf{e}_{2}, \textbf{e}_{3}\}\) is given by
and by definition, the rate of change of the angle \(\phi\) is given by:
To complete the set of Eqs. (2.3) and (2.5), we require additional equations for the deformation matrices. These equations were derived within the Lagrangian formalism and utilizing what was termed the “Association Principle,” as detailed in Ragazzo and Ruiz [39], Ragazzo and Ruiz [40] (see, also [23] addressing the treatment of Andrade rheology, [38] extending to bodies with permanent deformation, and [22] and [24] exploring the relations with the rheology of layered bodies).
To maintain simplicity in mathematical expressions, we consider only the basic rheology of “Kelvin-Voigt” combined with self-gravity here. The exploration of more generalized rheologies, which might introduce new time scales to the problem, is reserved for a companion paper [41].
The Tisserand frame of the body is the natural frame to present the equations for deformations. In this frame, the deformation matrix and the position vector are denoted by capital letters as follows:
The governing equation for \(\textbf{B}\) is:
where:
-
\(\gamma\), with dimensions of 1/time\(^2\), is a parameter representing the self-gravity rigidity of the body; a larger \(\gamma\) indicates a stronger gravitational force holding the body together.
-
\(\alpha\), also with dimensions of 1/time\(^2\), signifies the elastic rigidity of the body; for a fluid body, \(\alpha =0\).
-
\(\eta\), dimensions of 1/time, is a viscosity parameter; a body with a larger \(\eta\) is harder to deform at a given rate compared to a body with a smaller \(\eta\).
-
\(\textbf{F}\), with dimensions 1/time\(^2\), is the force matrix in the Tisserand frame \(\textrm{K}\):
$$\begin{aligned} \begin{array}{l l l} \textbf{F}&{}:=\textbf{C}+\textbf{S} \quad &{}\text {Deformation force}\\ {} &{} &{} \\ \textbf{C}&{}:= \frac{\omega ^2}{3} \left( \begin{array}{lll} 1&{} 0 &{} \ \ 0 \\ 0 &{} 1 &{} \ \ 0\\ 0 &{} 0 &{} -2 \end{array} \right) \quad &{}\text {centrifugal force}\\ {} &{} &{} \\ \textbf{S}&{}:= \frac{3G m_0}{|\textbf{X}|^5}\left( \textbf{X}\otimes \textbf{X}- \frac{|\textbf{X}|^2}{3}\textbf{1} \right) \quad &{} \text {Tidal force} \end{array} \end{aligned}$$(2.10)
where \(\textbf{X}\otimes \textbf{X}\) is a matrix with entries \(\big (\textbf{X}\otimes \textbf{X}\big )_{ij}=X_iX_j\).
To determine the Love number function associated with the deformation Eq. (2.9), we consider a simple harmonic force term of the form
where \(\mathbf {\widehat{F}}\) is a complex amplitude matrix, and \(\sigma \in {\mathbb R}\) is the constant forcing frequency. Assuming a solution of the form \(\textbf{B}(t)=\mathbf {\widehat{B}}\textrm{e} ^{\sigma t}\), we derive the relationship between the complex amplitudes as
where \(C(\sigma )\) is the complex compliance and
The complex Love number \(k_2(\sigma )\), commonly defined differently (see, e.g., [40]), is proportional to the complex compliance \(C(\sigma )\) as outlined in Mathews et al. [33] (paragraph 21):
where the number \(k_\circ :=\frac{3G {\,\mathrm I}_\circ }{R^5}\frac{1}{\gamma +\alpha }\) denotes the secular Love number, representing the value of \(k_2(\sigma )\) for static forces (\(\sigma =0\)).
In the case of a fluid body, the elastic modulus \(\alpha\) is zero, and
The body is held together solely by self-gravity. For a homogeneous fluid body of any density, \(k_f=3/2\). As discussed in Ragazzo [37], this represents the maximum possible value of \(k_f\) when the density of the body increases towards the center. Given that for any non-null elastic rigidity \(\alpha >0\), \(k_f>k_\circ\), we conclude that for any stably stratified body,
Historical note. Darwin was the pioneer in deriving Eq. (2.13), while examining tides on a homogeneous body composed of viscous fluid. In page 13 of Darwin [8], Darwin stated: “Thus we see that the tides of the viscous sphere are the equilibrium tides of a fluid sphere as \(\cos \epsilon : 1\), and that there is a retardation time \(\frac{\epsilon }{\sigma }\)”. In his paper, \(\nu\) denotes fluid viscosity, and \(\tan \epsilon = \frac{19}{2}\frac{\nu }{g R \rho } \sigma\), where g represents surface gravity, and \(\rho\) is the mass per unit volume of the body.
Given that for a homogeneous fluid body \(k_\circ =k_f=3/2\), Darwin’s statement can be reformulated as
Utilizing the relationships for a homogeneous spherical body, \({\,\mathrm I}_\circ =\frac{2}{5}m R^2\), \(g=\frac{Gm}{R^2}\), and \(\rho =m/\frac{4\pi R^3}{3}\), where m is the mass and R is the radius of the fluid body, and from the relations \(k_{\circ }=k_f=\frac{3}{2}=\frac{3 {\,\mathrm I}_\circ G}{R^5}\frac{1}{\gamma }\) and \(\tau =\frac{\eta }{\gamma }=\frac{19}{2}\frac{\nu }{g R\rho }\), we deduce
which aligns with a relation in Correia et al. [6, Eq. (39)].
The theory developed by Darwin [8], Darwin [9] has predominantly been applied in the frequency domain. Influenced by Darwin’s work, Ferraz-Mello [15] formulated an equation for the motion of the surface of the body under tidal forcing in the time domain. When \(\alpha =0\), the model in Correia et al. [5] with \(\tau _e=0\), the model in Ferraz-Mello [15], and Eq. (2.9) are all equivalent (our \(\tau\) corresponds to the \(\tau\) in Correia et al. [5], which is equal to the parameter “\(1/\gamma\)” used in Ferraz-Mello [15]). See Correia et al. [5], paragraph above Eq. (90), and Ferraz-Mello [16] for the equivalence between the models in Ferraz-Mello [15] and Correia et al. [5].
3 Zero deformation limit
In numerous celestial mechanics problems, bodies maintain near-spherical shapes at all times, which can be reformulated as
Given that Eq. (2.9) for \(\textbf{B}\) is linear, \(\Vert \textbf{B}\Vert\) is small if, and only if, \(\Vert \textbf{F}\Vert\) is small.
The relative motion between two nearly spherical bodies approximates Keplerian motion. Let a, n, and e represent the semi-major axis, the mean motion (period/(2\(\pi\))), and the eccentricity of the Keplerian ellipses, respectively. The magnitude of the force terms in the deformation Eq. (2.9) is proportional to the following characteristic frequencies:
The forces on the right-hand side of Eq. (2.9) are counteracted by the body’s self-gravity and possibly elastic rigidity \(\alpha \ge 0\). The static deformations are then given by
where we used \(k_\circ :=\frac{3G {\,\mathrm I}_\circ }{R^5}\frac{1}{\gamma +\alpha }\).
The order of magnitudes in Eq. (3.19) and inequality (2.15) imply
This indicates that the region in phase space defined by the following inequalities:
adheres to the small deformation hypothesis.
3.1 The zero deformation limit
Define the compliance \(\epsilon _d\), where d denotes deformation, as follows:
We then express
and substitute into Eqs. (2.3), (2.4), (2.5), and (2.9) to yield
where \(\tau\) is defined in (2.12) and \(\tilde{\textbf{b}}=\textbf{R}(\phi )\widetilde{\textbf{B}}\textbf{R}^{-1}(\phi )\).
The zero deformation limit is defined by:
In the zero deformation limit, Eq. (3.24) simplifies to:
In this scenario, the body spin, \(\omega\), remains constant and \(\textbf{x}\) follows a Keplerian ellipse.
To describe the Keplerian orbits, we change from variables \((\textbf{x},\dot{\textbf{x}})\) to \(\ell \in {\mathbb R}\) (orbital angular momentum), \(\textbf{A}\) (the Laplace vector), and f (the true anomaly), defined as:
where
The Laplace vector is normalized such that \(\Vert \textbf{A}\Vert =e\) is the orbital eccentricity and it points towards the periapsis, where \(\Vert \textbf{x}\Vert\) is minimized.
The three vectors
constitute an orthonormal basis, expressed in terms of the inertial frame basis vectors as
Here, \(\varpi\) denotes the longitude of the periapsis, the angle between \(\textbf{e}_A\) and \(\textbf{e}_1\).
The orbit is represented by
where \(\textbf{R}\) is the rotation matrix about the axis \(\textbf{e}_3\), as given in Eq. (2.6), and \(r(t)=\Vert \textbf{x}(t)\Vert\).
3.2 Passive deformations
The equations at the zero deformation limit (3.26) in the new variables become (see, e.g., [36] for details):
where \(\textbf{C}\) and \(\textbf{S}\) are given in Eq. (2.10).
In order to write \(\textbf{S}\) in a convenient way, we define the matrices
with \(\textbf{Y}_{-2}=\overline{\textbf{Y}}_2\), where the overline represents complex conjugation. These matrices have a simple transformation rule with respect to rotations about the axis \(\textbf{e}_3\), namely
Using
the tidal-force matrix in Eq. (2.10) can be written as
In the basis \(\{\textbf{Y}_{-2},\textbf{Y}_0,\textbf{Y}_2\}\)
that implies
In Eq. (3.38), the variables r, f, and \(\phi =\omega t\) are dependent on t.
To solve the equation \(\tau \dot{\widetilde{\textbf{B}}} + \widetilde{\textbf{B}}= \textbf{C}+\textbf{S}\), we do a harmonic analysis of the tidal force in Eq. (3.38) using:
where M denotes the mean anomaly, \(\dot{M}=n\), and \(X^{n^\prime ,m}_k(e)\) is termed the Hansen coefficient.
Equations (3.38) and (3.39) imply:
where \(U_{k,-1}=U_{k,1}=0\) and
The symmetry property \(X^{n^\prime ,-m}_{-k} = X^{n^\prime ,m}_{k}\) implies
The centrifugal force in Eq. (2.10) can be represented as
To obtain the almost periodic solution of the deformation equation
solving for each Fourier mode separately suffices. An alternative approach involves using the variation of constants formula:
Here, the definitions of the Love number \(k_2\) and the secular Love number \(k_\circ\) from Eq. (2.13) are used as well as the definitions of \(\zeta _c\) and \(\zeta _{\scriptscriptstyle T}\) from Eq. (3.21).
Given that
this formula indicates that the almost periodic solution of the tide equation is a time-averaged tidal force with an exponential weight decaying towards the past, characterized by time \(\tau\). Note that when \(\tau >0\) is nearly zero, integration by parts of the right-hand side of Eq. (3.45) yields
This represents the usual time delay approximation with corrections of the order of \(\tau ^2\).
The limit case of \(\tau \rightarrow \infty\) also presents interest. Here, we can interpret the averaging in Eq. (3.45) as approximately the ordinary averaging
4 Deformation manifold
The function \(t\rightarrow \textbf{B}_d\) provides a solution to the deformation Eq. (3.44) only when \(\epsilon _d=0\). To analyze the case where \(\epsilon _d>0\), we introduce new deformation variables \(\varvec{\delta }\textbf{B}\):
and using these variables we write Eq. (3.24)
For \(\epsilon _d=0\), Eq. (3.26) possesses the invariant manifold:
The variables \(\varvec{\delta }\textbf{B}\) are transversal to \(\Sigma _0\), and all associated eigenvalues equal \(-1/\tau <0\). Given this, a theorem by Fenichel [11, Theorem 3] suggests that for sufficiently small \(\epsilon _d\), there is an invariant manifold represented as a graph:
Additionally, \(\Sigma _{\epsilon _d}\) approximates \(\Sigma _0\) to order \(\epsilon _d\), as visualized in Fig. 1. The vector field on \(\Sigma _{\epsilon _d}\), considering corrections of order \(\epsilon _d\), is derived from Eq. (4.48) by ignoring the variables \(\varvec{\delta }\textbf{B}\) and setting \(\widetilde{\textbf{B}} = \textbf{B}_d\) in the equations for \(\dot{\textbf{x}}\) and \(\ell\). Thus, the equation on \(\Sigma _{\epsilon _d}\) is:
where, \(\textbf{b}_d=\textbf{R}(\phi )\textbf{B}_d\textbf{R}^{-1}(\phi )\).

Illustration of the Deformation Invariant Manifold \(\Sigma _{\epsilon _d}:=\Big \{(\textbf{x},\dot{\textbf{x}},\ell _s,\epsilon _d)\rightarrow \varvec{\delta }\textbf{B}\Big \}\). With the parameterization defined by \((\textbf{x},\dot{\textbf{x}},\ell _s,\epsilon _d)\), the vector field on \(\Sigma _{\epsilon _d}\) follows from (4.51)
The Fenichel theorem requires a specific condition concerning the eigenvalues of the linear equation: they must be sufficiently distant from the imaginary axis, depending on the flow on \(\Sigma _0\), which is fulfilled in this case since they are constant.
When n and \(\omega\) are neither small, to ensure the validity of the averaging, nor excessively large, which would violate inequalities (3.21) and result in large deformations, the approximation of \(\Sigma _0\) by \(\Sigma _{\epsilon _d}\) remains accurate. Under these conditions, changes in the Keplerian elements and spin are gradual, allowing the body ample time to adjust. The body maintains an average shape consistent with its secular Love number; for \(\alpha = 0\), it remains in hydrostatic equilibrium, countering centrifugal forces and slow tides.
An intriguing scenario arises when either \(\tau n\gg 1\) or \(\tau \omega \gg 1\). Here, the body lacks the time to relax amid orbital and spin modifications, causing the deformation to retain a memory of a past initial state. In such situations, Fenichel’s theorem is not applicable. If \(\tau \gg 1\) and the initial condition is \(\widetilde{\textbf{B}}=\widetilde{\textbf{B}}_{\circ }\), the solution to the homogeneous equation \(\tau \dot{\widetilde{\textbf{B}}} +\widetilde{\textbf{B}}= 0\) decays slowly as
In Ragazzo et al. [38], in a situation similar to this one, we added a permanent deformation \(\widetilde{\textbf{B}}_{\circ }\) to \(\textbf{B}_d\) and continued. Adopting the same approach here is feasible, even without a mathematical basis. However, we must separate the orbital motion’s averaging into two components: one for terms with \(\textbf{B}_d\) and another for terms with \(\widetilde{\textbf{B}}_{\circ }\). The averaging of terms associated with \(\widetilde{\textbf{B}}_{\circ }\) would resemble the averaging in rigid body problems. Here, we will not introduce the permanent deformation to keep the following analysis as simple as possible.
Later in this paper, we’ll explore situations where \(\tau n\) is large, assuming that, despite its size, Fenichel’s conditions remain met. This assumption warrants further mathematical scrutiny, potentially through multi-timescale system theories.
5 Orbital averaging
We average Eq. (4.51) with respect to orbital motion. We set the scaling parameter \(\epsilon _d\) to 1. Equations (4.51) and (3.45) then become:
Using variables \(\ell\), \(\textbf{A}\), and f defined in Eq. (3.27) and (3.28), Eq. (5.53) transforms to:
The terms requiring averaging are:
where \(\langle h\rangle =\frac{1}{2\pi }\int _0^{2\pi }h(M)dM\) represents the average over the mean anomaly.
The total angular momentum is conserved and given by:
The averaged result yields:
The term \(E_{1}\):
where we used, from Eq. (2.13), that \(k_2(-\sigma )\) is the complex conjugate of \(k_2(\sigma )\), represented as \(\overline{k_2(\sigma )}\).
We write \(E_{1}\) as
The terms \(\left( -\frac{5}{2}\textbf{E}_{2} + \textbf{E}_3\right)\): The calculation of these terms resembles that of \(E_1\). The analysis was extended and performed using the software “Mathematica”. We will skip the detailed steps. The outcomes are:
and
where we used Eq. (3.30).
The term \(\textbf{E}_{4}\): Detailed steps are omitted as before. The outcomes are:
and
The term \(\langle b_{d33}\rangle\):
where we used that \(X^{-3,0}_0=(1-e^2)^{-3/2}\) [30]Footnote 2.
For the Kepler problem, the following relations hold:
Assuming \(\ell >0\), we can use \(G(m_0+m) = n^2a^3\) to write:
Using the above relations, further calculations yield:
Given that \(\textbf{A} = e\, \big (\cos \varpi \textbf{e}_1+\sin \varpi \textbf{e}_2\big ) = e \,\textbf{e}_A\) and \(\dot{\textbf{e}}_A = \dot{\varpi }\textbf{e}_H\), we deduce:
Thus, the final averaged equations are:
5.1 Computation of Hansen coefficients
The Hansen coefficients depend solely on the eccentricity. Following [4], we express, for \(n<0\) and \(m \ge 0\),
Thus, to compute any series \(\left( \frac{r}{a}\right) ^n\textrm{e} ^{i m f}\), one can employ series multiplication of the fundamental series of \(a/r\) and \(\textrm{e} ^{if}\). This multiplication can be efficiently executed with an algebraic manipulator.
For the computation of the series for \(\frac{a}{r}\) and \(\textrm{e} ^{if}\), one can refer to Murray and Dermott [36] Section 2.5:
where \(J_k(x)\) denotes the Bessel function. The series for \(J_k(x)\) converges absolutely for all values of \(x\).
Up to second order in eccentricity and with \(\textrm{e} ^{iM}=z\) the fundamental series are:
These expressions and Eq. (5.72) imply \(X^{n,m}_k=\mathcal {O}(e^{|m-k|})\).
5.2 The equations in Correia and Valente [7]
Some relations between the Hansen coefficients presented in Correia and Valente [7], Eq. (158) and (159), are:
One can use these equations to simplify Eq. (5.71). After such simplifications, the equation governing the eccentricity is:
For further simplification, one can apply \(\ell = \mu \sqrt{G(m+m_0)a(1-e^2)}\), yielding:
This result corresponds to Eq. (129) in Correia and Valente [7].
Our expression for the variation of the longitude of the periapsis, \(\dot{\varpi }\), differs from Eq. (130) in Correia and Valente [7] due to the neglect of centrifugal deformation in the cited work.
6 Averaged equations: a geometrical approach
In the following two sections, we analyze Eq. (5.71) from a geometric perspective using singular perturbation theory.
The longitude of the periapsis, \(\varpi\), is absent from the equation for \(\dot{e}\) in (5.71). Therefore, the dynamics of the state variables \(e, \ell ,\) and \(\ell _s\) can be analyzed independently of \(\varpi\). The conservation of total angular momentum, \(\ell _{\scriptscriptstyle T} = \ell + \ell _s\), implies that it is sufficient to observe the dynamics of e and \(\ell _s\).
While the dynamics unfolds within two-dimensional surfaces, on the level sets of angular momentum, analyzing the equations within a three-dimensional phase space proves more insightful. This approach facilitates a comprehensive understanding of the global dynamics and the impact of varying angular momentum. After some investigation, we selected \((\omega , e, a)\) as the phase-space variables, with \(n = \sqrt{\frac{G(m + m_0)}{a^3}}\) being a derived quantity. The differential equation for \(a=\frac{\ell ^2}{\mu c (1-e^2)}\) is obtained from the equations for \(\dot{\ell }\) and \(\dot{e}\). Henceforth we use the approximation
Equation (5.71) and the identity \(\frac{ 3c}{mn^2a^3}=\frac{3 m_0}{m+m_0}\) imply
Conservation of angular momentum \(\ell _{\scriptscriptstyle T} = \sqrt{\mu c a} \sqrt{1-e^2} + {\,\mathrm I}_\circ \omega\) implies
This suggests the following nondimensionalization of a:
is defined as the radius of the circular orbit for two point masses, \(m_0\) and m, possessing an orbital angular momentum of \(\ell = \ell _T\).
Let
be the angular frequency of the circular orbit of radius \(a_\circ\). Kepler’s third law implies, \(n^2a^3=G(m+m_0)=n_\circ ^2a_\circ ^3\) and so
Conservation of angular momentum, as expressed in Eq. (6.79), implies
where
For the Mercury-Sun system, where \(m_0\) is the mass of the Sun, \(\epsilon = 6.8 \times 10^{-10}\), and for the Earth–Moon system, where \(m_0\) is the mass of the Moon, \(\epsilon = 0.0036\). Although \(\epsilon\) appears to be very small for all problems of interest, in this section, we will conduct a geometric analysis with an arbitrary value of \(\epsilon\) to elucidate the global properties of the equations.
Using the above definitions Eq. (6.78) can be written in nondimensional form as
where \(\mu\), c, \(\mathcal{A}_0\), \(\mathcal{A}_2\), and \(\mathcal{A}_4\) are given in Eq. (5.71).
6.1 Estimate of the rate of spin variations
In a time scale where the unit of time corresponds to one radian of orbital motion, the spin angular velocity is \(\omega /n\), and, from Eq. (6.78), the rate of change of spin is
where
From Eq. (2.13)
and we can express
For a fixed pair (e, n), \(\frac{\dot{\omega }}{n^2} = V\big (\tau n, \frac{\omega }{n}, e\big )\) defines a differential equation for \(\frac{\omega }{n}\). We aim to estimate two typical quantities associated with V: its maximum and the time constant near a stable equilibrium, as depicted in Fig. 2.

Vector field \(\frac{\dot{\omega }}{n^2}=V\big (\tau n, \frac{\omega }{n},e\big )\) with constant n and e. \(V_{max}\) represents the maximum rate of variation of \(\frac{\omega }{n}\) and \(\tau _s^{-1}=\tan \psi\) denotes the time constant of a stable equilibrium
The maximum value of the function \(\sigma \rightarrow \frac{|\sigma |}{1+\sigma ^2}\) is \(\frac{1}{2}\). Hence,
Applying Parseval’s identity, we get
Based on Laskar and Boué [30], \(X^{-6,0}_0=\frac{\frac{3 e^4}{8}+3 e^2+1}{\left( 1-e^2\right) ^{9/2}}\) leading to
The right side of this inequality increases with e, with values: 1/2 for \(e=0\), approximately 1.6 for \(e=0.4\), approximately 3.3 for \(e=0.5\), and approximately 8 for \(e=0.6\). Since \(\frac{m_0}{m+m_0}\le 1\), we deduce
It is worth noting that \(\zeta _{\scriptscriptstyle T}\), defined in Eq. (3.21), is a small quantity.
For sufficiently large values of \(\tau n\), the stable equilibria of \(\frac{\omega }{n}\) are close to semi-integers \(\frac{k}{2}\), with \(k=1,2,\ldots\), and for these values, the dominant term in the sum of V is the \(k^{th}\)-term [5]. Thus, Eq. (6.87) yields the time constant
for an equilibrium \(\frac{\omega }{n}\approx \frac{k}{2}\).
Note that \(V_{max}\) is independent of the characteristic time of the rheology \(\tau\), whereas the time constant \(\tau _k\) has a linear dependency. A maximum rate speed \(V_{max}\) proportional to \(\zeta _{\scriptscriptstyle T}\, k_\circ\) will be observed during spin jumps. The prefactor 10 in Eq. (6.91) varies with the eccentricity e.
6.2 Equilibria, linearization and the invariant subspace of zero eccentricity
Using the expresions for the Hansen coefficients in Sect. 5.1 we can compute the expansion of the right-hand side of Eq. (6.85) up to first order in eccentricity:
These equations imply that the plane \(e=0\) is invariant.
The only equilibria of Eq. (6.85) are on the plane \(e=0\), as shown in the next paragraph, and are given by the curve
The equilibria of (6.85) satisfiy \(\mathcal{A}_{0} = 0\) and \(\frac{ 1-e^2}{2} \mathcal{A}_2 + \mathcal{A}_4=0\). Equation (5.76) shows that these equations imply
We notice, from (6.86), that for all \(x \ne 0\), \(x\textrm{Im}\, k_2(x)< 0\) and hence (6.95) holds if and only if each term of the sum is zero. The Hansen coefficients have the following properties: \(\forall k \ne 0\), \(X^{-3,0}_k(e)= 0\) if and only if \(e=0\) and \(\forall k \ne 2\), \(X^{-3,2}_k(e)= 0\) if and only if \(e=0\). This implies that \(e=0\) is a necessary condition for the existence of an equilibrium.
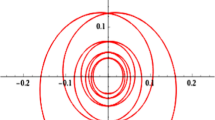
Conservation of angular momentum implies that the orbits of the vector field (6.93) in the plane where \(e=0\) are parameterized by angular momentum. Equation (6.83) shows that the representation of these orbits in the plane \((\tilde{a}, \frac{\omega }{n})\) is given by the graphs
as illustrated in Fig. 3.

Orbits of the Eq. (6.85) on the invariant plane \(e=0\). The orbits are labelled by the total angular momentum \(\ell _{\scriptscriptstyle T}\) by means of the nondimensional parameter \(\epsilon ^{-1}=\frac{\ell _{\scriptscriptstyle T}^4}{ {\,\mathrm I}_\circ \mu c^2}\). The equilibria are on the horizontal line \(\frac{\omega }{n}=1\): the green dots represent stable equilibria and the red dots represent unstable equilibria. The black dot at \(\tilde{a}=\frac{9}{16}\), \(\frac{\omega }{n}=1\) represents the single equilibrium that occurs for the special value \(\epsilon =\frac{27}{256}\). For \(\epsilon >\frac{27}{256}\) (small angular momentum) all the solutions lead to a collision (Color figure online)
In the significant case where \(\epsilon \approx 0\), Eq. (6.83) suggests that \(0 \approx \epsilon \frac{\omega }{n} = \tilde{a}^{\frac{3}{2}}(1 - \tilde{a}^{\frac{1}{2}} \sqrt{1 - e^2})\). Up to first order in eccentricity, we have \(\tilde{a} = 1\) and \(n = n_\circ\). Using this approximation, the function \(\frac{\dot{e}}{e}\) in Eq. (6.93) is expressed as
where \(n = n_\circ =\) constant and \(\tilde{c}\) is a positive, although small, constant. The graph of \(\frac{\dot{e}}{e\tilde{c}}\) as a function of \(\frac{\omega }{n}\) for various values of \(\tau n\) is depicted in Fig. 4. This figure illustrates that \(\frac{\dot{e}}{e}\) changes sign near the plane \(e = 0\). Consequently, a solution with an initial eccentricity close to zero, yet sufficiently distant from the stable equilibrium at \(\frac{\omega }{n} = 1\), may experience an increase in eccentricity.

The graph of \(\frac{\dot{e}}{e\tilde{c}}\) as a function of \(\frac{\omega }{n}\) for values of \(\tau n\) equal 1, 10, and 100. For \(n=10\), \(\frac{\dot{e}}{e\tilde{c}}\) has a zero, not easily seen in the Figure, at \(\frac{\omega }{n}=5.26\)
The next step in understanding the dynamics of Eq. (6.85) involves linearization about the equilibria. It is evident from Fig. 3 that the equilibria can be parameterized by their \(\tilde{a}\) coordinate. Thus, an equilibrium is represented by \((\omega , \tilde{a}) = (\omega _e, \tilde{a}_e)\), where, according to Eq. (6.83), \(\tilde{a}_e\) is the solution to
The special equilibrium \(\tilde{a}_e = \frac{9}{16}\), corresponding to the bifurcation value \(\epsilon = \frac{27}{256}\), marked by the black dot in Fig. 3, represents a threshold of stability: an equilibrium with \(\tilde{a}_e < \frac{9}{16}\) is unstable, while an equilibrium with \(\tilde{a}_e > \frac{9}{16}\) is stable. Indeed a saddle-node bifurcation occurs for this parameter value, since (6.85) can be reduced to a two dimensional system in the form
where the function (6.83) is used to eliminate the spin–orbit ratio from these equations. Equation (6.93), the properties of the Hansen coefficients, and a straightforward calculation show that
and hence system (6.99) can be expanded as
which is the normal form of the saddle-node bifurcation [29].
Given that \(0< \epsilon < \frac{27}{256} \approx 0.1\), a perturbative calculation reveals that the largest root of this equation (stable equilibrium) satisfies
This approximation remains accurate up to \(\epsilon = 0.05\).
At equilibrium, the orbit is circular. If \(\ell _e = \ell _T - {\,\mathrm I}_\circ n_e\) denotes the orbital angular momentum at equilibrium, then \(a_e = \frac{\ell _e^2}{\mu c}\). Since \(a_e = \tilde{a}_e a_\circ\) and \(a_\circ = \frac{\ell _{\scriptscriptstyle T}^2}{\mu c}\), we obtain
Thus, \(\tilde{a}_e\) represents the square of the ratio of orbital angular momentum to total angular momentum at equilibrium. For the Mercury-Sun system, where \(m_0\) is the mass of the Sun, \(\epsilon = 6.8 \times 10^{-10}\) and \(\tilde{a}_e \approx 1\). For the Earth–Moon system, where \(m_0\) is the mass of the Moon, \(\epsilon = 0.0036\) and \(\tilde{a}_e = 0.993\). It appears that in most problems of interest, \(\tilde{a}_e \approx 1\).
The linearization of Eq. (6.85) at \((\omega , \tilde{a}, e) = (\omega _e, \tilde{a}_e, 0)\) is derived easily from Eq. (6.93):
where \(\tilde{n}_e = n_0\,\frac{1}{\tilde{a}_e^{3/2}}\). Each equilibrium has: one eigenvalue equal to zero, associated with the conservation of angular momentum; one negative eigenvalue \(\lambda _e = -\frac{7 \tilde{n}_e \epsilon }{\tilde{a}_e^2(\tilde{n}_e^2 \tau ^2 + 1)}\left( \frac{k_\circ N \tilde{n}_e\tau }{\tilde{a}_e^3}\right)\), with an eigenvector tangent to the eccentricity axis; and one eigenvalue \(\lambda _0 = -\frac{2 \tilde{n}_e (\tilde{a}_e^2 - 3 \epsilon )}{\tilde{a}_e^2}\left( \frac{k_\circ N \tilde{n}_e\tau }{\tilde{a}_e^3}\right)\), with an eigenvector in the plane \(e=0\) and tangent to the surface of constant angular momentum. As expected, \(\lambda _0 = 0\) in the critical case where \(\epsilon = \frac{27}{256}\) and \(\tilde{a}_e = \frac{9}{16}\), \(\lambda _0 > 0\) if \(\tilde{a}_e < \frac{9}{16}\), and \(\lambda _0 < 0\) if \(\tilde{a}_e > \frac{9}{16}\).
Consider a solution to Eq. (6.93) that satisfies \(\lim _{t \rightarrow \infty }\big (e(t), \tilde{a}(t)\big ) = \big (0, \tilde{a}_e\big )\), and let \(\delta _a(t) = \tilde{a}(t) - \tilde{a}_e\). At a certain time \(\tilde{t}\), this solution is sufficiently close to \((0,\tilde{a}_e)\) for the linear approximation to be valid. Since \(\delta _a(t) = e^{\lambda _0 (t - \tilde{t})}\delta _a(\tilde{t})\) and \(e(t) = e^{\lambda _e (t - \tilde{t})}e(\tilde{t})\), we conclude that near the equilibrium,
where
Regardless of the value of the constant factor in Eq. (6.107), which in Fig. 5 we assume to be one, the orbit’s geometry near the equilibrium is controlled by the ratio \(\frac{\lambda _0}{\lambda _e}\). In Fig. 5 LEFT, we illustrate how the orbit changes as \(\frac{\lambda _0}{\lambda _e}\) varies, with the ratio \(\frac{\lambda _0}{\lambda _e} = 1\) being a critical value. For \(\frac{\lambda _0}{\lambda _e} > 1\), the orbit approaches the equilibrium along the e-axis, and for \(0< \frac{\lambda _0}{\lambda _e} < 1\), the orbit approaches the equilibrium along the \(\delta _a\) axis. In Fig. 5 RIGHT, we demonstrate how to determine the special value of \(\tilde{a}_e\), corresponding to \(\frac{\lambda _0}{\lambda _e} = 1\), as a function of the parameter \(\tau \tilde{n}_e\). The maximal value of this special \(\tilde{a}_e\) is \(\frac{169}{225} \approx 0.75\), achieved when \(\tau = 0\).

LEFT: The figure shows possible orbits on the eccentricity-semi-major axis (\(\delta _a = \tilde{a} - \tilde{a}_e\)) plane, \(\delta _a = \text {constant}\ e^{\lambda _0/\lambda _e}\) with \(\text {constant} = 1\) for various \(\lambda _0/\lambda _e\) values. RIGHT: A graphical method to find the special value of \(\tilde{a}_e\), where \(\lambda _0/\lambda _e = 1\), as a function of \(\tau \tilde{n}_e\)
It appears that in most problems of interest, \(\epsilon\) is very small, \(\tilde{a}_e \approx 1\), and \(\lambda _0/\lambda _e \gg 1\), indicating that solutions approach the stable equilibrium along the e-axis, namely the weak-stable manifold of the equilibrium.
6.3 Slow-fast systems and singular perturbation theory
For \(\epsilon \approx 0\) Eq. (6.93) has the form of a slow-fast system:
with \(x=\omega \in {\mathbb R}\) as the fast variable and \(y=(e,\tilde{a})\in {\mathbb R}^2\) as the slow variables [14].
Given an initial condition in the state space \(\big \{\omega ,e,\tilde{a}\big \}\), the value of \(\omega\) varies while \((e,\tilde{a})\) stays nearly constant until the state reaches the slow manifold
where \(\mathcal{A}_0\) is given in Eq. (5.71).
When \((x,y_0)\) is not close to \(\Sigma _s(0)\), the fast dynamics is governed by the layer problem, \(\dot{x}=f(x,y_0,0)\). Here, the fast dynamics corresponds to the fast spin variation with fixed e and \(\tilde{a}\). The spin decreases on points above \(\Sigma _s(0)\) and decreases on points under \(\Sigma _s(0)\), see Fig. 10. Close to the slow manifold \(\Sigma _s(0)\), the dynamics is approximated by the reduced problem, where the fast variable is given by an implicit function, solution of \(f(\Phi (y),y,0)=0\), and the slow variable solves the differential equation on \(\Sigma _s(0)\), \(\dot{y} = g(\Phi (y),y,0)\). The implicit function theorem ensures that \(\Phi\) is locally determined at \((x_0,y_0) \in \Sigma _s\) if \(\partial _x f(x_0,y_0,0)\ne 0\). In this case, \(\Sigma _s(0)\) is called normally hyperbolic at \((x_0,y_0)\). The results from geometric singular perturbation theory [14] state that if the system (6.109) has a normally hyperbolic slow manifold \(S_0\), for each small \(\epsilon >0\) exists an invariant manifold \(S_\epsilon\) diffeomorphic to \(S_0\) which is stable (unstable) if \(\partial _x f<0\) (\(\partial _x f>0\)) on \(S_0\). We will denote by \(\Sigma _s(\epsilon )\) the union of the hyperbolic components of perturbed slow manifold in (6.110).
The dynamics across the entire phase space can be elucidated by examining the geometry of the slow manifold (6.110). Within the first octant \(\mathcal{B}_1:= \{\omega> 0, e> 0, a > 0\}\), \(\Sigma _s(0)\) possesses a single connected component that splits \(\mathcal{B}_1\) into two regions. The conservation of angular momentum reduces the analysis to a two-dimensional problem. A diagram illustrating the local behavior of orbits near the stable equilibrium is presented in Fig. 5 LEFT. A global illustration of the flow on a level set of angular momentum is shown in Fig. 6.

The phase space close to the synchronous states \(\omega /n=1\), \(e=0\). The blue surface represents a level set of the angular momentum and the red surface represents the slow manifold \(\Sigma _s(\epsilon )\). Both surfaces and the plane \(e=0\) intersect only at the equilibria. The stable separatrix of the saddle point delimits the basin of attraction of the node and the region whose solutions tend to the collision \(a=0\) (Color figure online)
7 Spin–orbit resonances
In this section, we assume that the ratio \(\frac{\omega }{n}\) is at most on the order of tens, so that
Under this condition, Eq. (6.83), i.e., \(\tilde{a}^{\frac{3}{2}}(1 - \tilde{a}^{\frac{1}{2}} \sqrt{1 - e^2}) = \epsilon \frac{\omega }{n}\), yields two solutions for \(\tilde{a}\). The first solution is \(\tilde{a} = \left( \epsilon \frac{\omega }{n}\right) ^{2/3} + \mathcal {O}(\epsilon )\). This solution closely approximates the surface of constant angular momentum in a region that includes the unstable equilibrium \(\tilde{a}_e \approx 0\). This approximation is depicted in Fig. 3 by the nearly vertical red dot-dashed line near \(\tilde{a}_e \approx 0\). We will not focus on this region. The second solution is \(\tilde{a} = \frac{1}{1 - e^2} + \mathcal {O}(\epsilon )\), which is of primary interest. This solution approximates the surface of constant angular momentum in a region containing the stable equilibrium \(\tilde{a}_e \approx 1\). This approximation is depicted in Fig. 3 by the nearly vertical red dot-dashed line near \(\tilde{a}_e \approx 1\). Disregarding the error of order \(\epsilon\), we have \(\tilde{a}_e = 1\), \(a_e = a_\circ\), and
In the subsequent analysis we use these approximations.
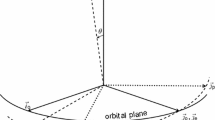
The geometry of the slow manifold \(\Sigma _s(0)\) plays a crucial role in the capture into spin–orbit resonance, particularly where \(\Sigma _s(0)\) is not normally hyperbolic. The slow manifold becomes non-normally hyperbolic at points where the projection map from \(\Sigma _s(0)\) to the \(\{a,e\}\) plane is singular. These generic singular points of the projection are known as folds and collectively form the “fold curves”. In Fig. 7, the fold curves are depicted in blue on the slow manifold \(\Sigma _s(0)\), which is represented as an orange surface. Although the fold curves themselves are smooth, their projection onto the \(\{a,e\}\) plane includes singular points termed “cusps”, at which a moving point on the projection reverses direction. A cusp point on a fold curve occurs where the tangent to the curve becomes parallel to the \(\omega\)-axis. The flow dynamics near a fold are extensively described in the literature [27].

Figure showing three views of the slow manifold \(\Sigma _s(0)\), which is the orange surface, and the fold curves in blue (Color figure online)
We illustrate the so called phenomenon of capture into spin–orbit resonance by a concrete example presented in Correia et al. [5] and Correia et al. [6]. We use the parameters of the exoplanet HD80606b and its hosting star, namely \(m_0 = 2008.9 \cdot 10^{30}\)kg, \(m = 7.746 \cdot 10^{28}\)kg, \({\,\mathrm I}_\circ = 8.1527 \cdot 10^{40}\) kg \(\mathrm{m^2}\). The initial conditions are chosen as \(a=0.455\)au, \(e=0.9330\) and \(\omega =4\pi \, \textrm{rad}/\textrm{day}\) and hence \(\epsilon = 1.35 \cdot 10^{-8}\). The parameters of the rheology are \(k_\circ = 0.5\) and \(\tau = 10^{-2}\)year.
In Fig. 8 (top panels), the red curve represents a trajectory of the fundamental equations, given in Sect. 2, which was obtained by means of numerical integration. The numerically computed trajectory has consecutive transitions between stable branches of the perturbed slow manifold \(\Sigma _s (\epsilon )\). This trajectory shows a slow decrease of the eccentricity towards \(e=0\) while the spin–orbit ratio has fast transitions between integers and half-integers with final value \(\omega /n=1\). The stable branches of \(\Sigma _s(\epsilon )\) are quite flat (parallel to the (e, a)-plane) near the planes \(\frac{\omega }{n}=\frac{k}{2}\), \(k\in {\mathbb Z}\). These results are detailed in Figure 14 from Correia et al. [6]. We can observe in Fig. 8 the full agreement between the solution of the fundamental equations and the fast-slow-geometric analysis of the averaged equations.
The projection of the fold curves to the plane (a, e) are shown in Fig. 8 DOWN-RIGHT. Each curve contains a cusp singularity and is labeled by an integer or half-integer. A point initially over (a, e) can be attracted to a resonance \(\frac{\omega }{n}=\frac{k}{2}\) only if it is inside a dashed curve that intersects the curve labeled by \(\frac{k}{2}\); see caption of Fig. 8 for further information.

Geometrical perspective of capture into spin–orbit resonances. The slow manifold \(\Sigma _s(0)\) loses normal hyperbolicity at fold curves (black), characterized by \(\partial _{\tilde{\omega }} \mathcal{A}_0 = 0\). The fold curves become parallel to the \(\frac{\omega }{n}\)-axis at the cusp points. The blue surface represents a level set of angular momentum, as depicted in Fig. 6. The red curve represents a solution of the complete system, which exhibits jumps when crossing the fold curves. In the lower-right frame, the projection of the cusp-shaped curves onto the (a, e) plane is displayed. Each curve is annotated with an integer or half-integer, symbolizing a resonance \(\omega /n = \frac{k}{2}\), for \(k = 1, \ldots , 13\), as noted on the right side of the figure. The dashed lines correspond to projections of the constant angular momentum surfaces \(a = \frac{\ell _{\scriptscriptstyle T}^2}{\mu c}\frac{1}{1 - e^2}\). If the total angular momentum \(\ell _{\scriptscriptstyle T}\) is sufficiently large such that the curve \(a = \frac{\ell _{\scriptscriptstyle T}^2}{\mu c}\frac{1}{1 - e^2}\) does not intersect the projection of the fold curve associated with a specific \(\omega /n = \frac{k}{2}\) spin–orbit resonance, then the k : 2 resonance is precluded for that angular momentum value (Color figure online)
7.1 Spin–orbit resonances require large relaxation times \(\tau\).
The approximation \(\tilde{a}=(1-e^2)^{-1}\) and Eq. (6.82) imply \(n=n_\circ (1-e^2)^{3/2}\). The imaginary part of the Love number (6.86) can then be written as
where
For \(e=0\), the slow manifold lacks any fold points for any value of \(\tau > 0\), as illustrated in Fig. 3. Consider a fixed value \(e_1 > 0\) for e. Equations (6.87) and (7.113) imply the existence of at least \(j-1\) fold points in the region \(\{0< e< e_1, 0< \frac{\omega }{n} < C\}\), where \(C > 0\) represents a positive constant, if and only if
has j zeroes for \(\frac{\omega }{n} \in (0, C)\).
Given that \(X^{-3,2}_{k}(0) = 1\) and \(X^{-3,2}_{k}(e_1) = \mathcal {O}(e_1)\), function (7.115) can be expressed as \(\frac{\, (\omega /n - 1)}{\tilde{\epsilon } + (\omega /n - 1)^2} + \mathcal {O}(e_1^2)\). For \(0< \frac{\omega }{n} < C\) and a fixed \(\tilde{\epsilon }> 0\), this function exhibits a single zero near \(\frac{\omega }{n} = 1\) if \(e_1 > 0\) is sufficiently small. Furthermore, for a fixed \(e_1 > 0\) and \(\tilde{\epsilon }= 0\), function (7.115) presents poles for every \(\frac{\omega }{n} = \frac{k}{2}\), \(k \in \mathbb {Z}\), thereby ensuring at least one zero in each interval \((k, k + \frac{1}{2})\), where k is any half-integer. A continuity argument suggests that if \(\tilde{\epsilon }\) is sufficiently close to zero (implying \(\tau\) is sufficiently large), then for any fixed \(e_1\), function (7.115) will have zeroes near j/2, for \(j = 1, 2, \ldots\). This analysis indicates that, particularly for small \(e_1 > 0\), the condition \(\tilde{\epsilon }\ll 1\) (equivalently, \(\tau \gg 1\)) is a necessary condition for the creation of folds in the slow manifold \(\Sigma _s(0)\).
For the Earth–Moon system, where \(m_0\) is the mass of the Moon, \(\epsilon =0.0036\) and \(n_\circ ^{-1}=7.6\) days, a value \(\tau >76\) days gives \(\tilde{\epsilon }<0.0025\). For the Mercury-Sun system, where \(m_0\) is the mass of the Sun, \(\epsilon =6.8\times 10^{-10}\) and \(n_\circ ^{-1}=13\) days, a value \(\tau >130\) days gives \(\tilde{\epsilon }<0.0025\). In the case of the parameters chosen for HD80606b, \(\tilde{\epsilon } \approx 1.28 \cdot 10^{-5}\).
For \(\tilde{\epsilon }\ll 1\) and close to a resonance \(\omega /n = j/2\), \(j\in \{2,3,\ldots \}\), \(\Sigma _s(0)\) can be approximately computed as a power series in \(\tilde{\epsilon}\). If we substitute
into the equation
and solve the resulting equation for the coefficient of \(\tilde{\epsilon }\) and \(\tilde{\epsilon }^2\) we obtain,
We emphasize that the functions \(\Phi (j/2, e, \tilde{\epsilon })\) represent the \(\mathcal {O}(\epsilon ^0)\) approximations of the slow invariant manifold \(\Sigma _s(\epsilon )\). These functions determine the dynamics of the reduced system, serving as the initial step in comprehending the flow on \(\Sigma _s(\epsilon )\). Further exploration of this flow constitutes a subject for future work. Figure 9 illustrates the approximation of \(\Sigma _s(0)\) on some resonances.

Approximation of the resonances \(\omega /n \approx j/2\), for \(j=2,3,4,5\). The dashed lines correspond to the approximation up to \(\mathcal {O}(\tilde{\epsilon })\) and the continuous lines up to \(\mathcal {O}(\tilde{\epsilon }^2)\). In this graph we use the parameters of HD80606b, \(\tilde{\epsilon } \approx 1.28 \cdot 10^{-5}\)
We end this section with a topological description of the slow-fast dynamics of Eq. (6.85). In Fig. 10 we present a sketch of flow lines for \(\epsilon =0\) (LEFT panel) and \(\epsilon >0\) small (RIGHT panel). Explanations are given in the Figure caption. The orientation of the fast flow lines was previously examined in Sect. 6.1. The orientation of the slow flow lines is determined by the monotonic decrease in eccentricity on \(\Sigma _s(0)\). This is a consequence of the same argument employed to determine the equilibria, as presented in Eq. (6.95).

The phase portrait of the averaged system (6.85). In the left, the lines in dark blue represent the solutions of the layer problem, the light blue represent the solutions of the reduced problem on the unstable branches of \(\Sigma _s(0)\) and the red lines the solutions of the reduced problem on the stable branches. The black points are those at which the manifold ceases to be normally hyperbolic, the generic fold points. In the right, we depict the perturbed flow, i.e. for \(\epsilon >0\). The solutions close to the fold points, where the jumps occur, are characterized in Krupa and Szmolyan [27], see for instance Fig. 2 on page 289. The perturbed fast flow is also represented in dark blue, except for some especial solutions. We highlight, in dark green, the solutions incident on the fold points, these solutions delimit the basin of attraction of the various spin–orbit resonances for prograde motions (\(\omega >n\)). In red and light blue are represented invariant manifolds that persisted under the perturbation. The continuation of these manifolds, dashed red and light blue, also delimit the portion of the resonances’ basin of attraction for retrograde motions (\(\omega <n\)). We remark that, since the normally hyperbolic components of \(\Sigma _s(0)\) are not compact, the persisting manifolds are not necessarily unique, however the qualitative behavior of the flow is the same, see [27] for details. This geometric perspective also assists in the significant problem in tide theory concerning the probability of capture into spin–orbit resonances, such probabilities are proportional to the area of the basins of attraction (Color figure online)
8 Conclusion
In this paper, we presented a set of equations for the evolution of the orbital elements in the gravitational two-body problem under the influence of tides. These equations, previously obtained by other authors, were derived here through a two-step procedure. Initially, we used the fact that tidal deformations are very small to demonstrate the existence of an invariant manifold, which we have termed the deformation manifold. Although our arguments are mathematically sound, they lack the appropriate quantifiers. The second step involves averaging the equations on the deformation manifold. This step is contingent upon the first, leading to uncertainties about whether the averaged equations are mathematically coherent with the large values of \(\tau n\) used in Sect. 7. In the physics literature, employing large values of \(\tau n\) in the averaged equations has been common practice.
Analyzing the averaged equations mathematically presents a significant challenge due to the analytical complexity of the vector field, defined by infinite sums of Hansen coefficients, which are themselves infinite series in powers of eccentricity.
Given the scientific significance of this problem, it warrants investigation from a mathematical perspective. The geometric theory of singular perturbation, potentially incorporating multiple time scales as suggested in our companion paper [41], appears to be a suitable mathematical framework to address this challenge.
Notes
This counterintuitive claim is associated with the omission of deformation inertia. In the equation for the damped harmonic oscillator \(m \ddot{x} = -x - \eta \dot{x}\), the solutions converge to zero more rapidly as the damping coefficient \(\eta\) increases. If the inertia coefficient is zero, the equation simplifies to \(\eta \dot{x} = -x\), leading to the opposite effect: \(x(t) = e^{-t/\eta } x(0)\).
The gravity field coefficient \(J_2\) (dynamic form factor) is related to \({\,\mathrm I}_\circ \langle b_{d33}\rangle\) by means of \({\,\mathrm I}_\circ \langle b_{d33}\rangle =-\frac{2}{3}mR^2 J_2\) that implies
$$J_{2} = \frac{{I_{0} }}{{mR^{2} }}k_{0} \left( {\frac{{\zeta _{c} }}{3} + \frac{{\zeta _{T} }}{{(1 - e^{2} )^{{3/2}} }}} \right)$$(5.66)
References
Alexander, M.E.: The weak friction approximation and tidal evolution in close binary systems. Astrophys. Space Sci. 23, 459–510 (1973)
Boué, G., Correia, A.C.M., Laskar, J.: Complete spin and orbital evolution of close-in bodies using a Maxwell viscoelastic rheology. Celest. Mech. Dyn. Astron. 126(1–3), 31–60 (2016)
Boué, G., Efroimsky, M.: Tidal evolution of the Keplerian elements. Celest. Mech. Dyn. Astron. 131, 1–46 (2019)
Cherniack, J.R.: Computation of Hansen coefficients. SAO Special Report, p. 346 (1972)
Correia, A.C., Boué, G., Laskar, J., Rodríguez, A.: Deformation and tidal evolution of close-in planets and satellites using a Maxwell viscoelastic rheology. Astron. Astrophys. 571, A50 (2014)
Correia, A.C.M., Ragazzo, C., Ruiz, L.S.: The effects of deformation inertia (kinetic energy) in the orbital and spin evolution of close-in bodies. Celest. Mech. Dyn. Astron. 130(8), 51 (2018)
Correia, A.C.M., Valente, E.F.S.: Tidal evolution for any rheological model using a vectorial approach expressed in Hansen coefficients. Celest. Mech. Dyn. Astron. 134(3), 24 (2022)
Darwin, G.H.: I. On the bodily tides of viscous and semi-elastic spheroids, and on the ocean tides upon a yielding nucleus. Philos. Trans. R. Soc. Lond. 170, 1–35 (1879)
Darwin, G.H.: On the secular changes in the elements of the orbit of a satellite revolving about a planet distorted by tides. Nature 21(532), 235–237 (1880)
Efroimsky, M.: Bodily tides near spin-orbit resonances. Celest. Mech. Dyn. Astron. 112(3), 283–330 (2012)
Fenichel, N.: Persistence and smoothness of invariant manifolds for flows. Indiana Univ. Math. J. 21(3), 193–226 (1971)
Fenichel, N.: Asymptotic stability with rate conditions. Indiana Univ. Math. J. 23(12), 1109–1137 (1974)
Fenichel, N.: Asymptotic stability with rate conditions. II. Indiana Univ. Math. J. 26(1), 81–93 (1977)
Fenichel, N.: Geometric singular perturbation theory for ordinary differential equations. J. Differ. Eq. 31(1), 53–98 (1979)
Ferraz-Mello, S.: Tidal synchronization of close-in satellites and exoplanets. A rheophysical approach. Celest. Mech. Dyn. Astron. 116(2), 109–140 (2013)
Ferraz-Mello, S.: The small and large lags of the elastic and anelastic tides-the virtual identity of two rheophysical theories. Astron. Astrophy. 579, A97 (2015)
Ferraz-Mello, S.: Tidal synchronization of close-in satellites and exoplanets: II. Spin dynamics and extension to Mercury and exoplanet host stars. Celest. Mech. Dyn. Astron. 122, 359–389 (2015)
Ferraz-Mello, S.: Planetary tides: theories. In: Baù, G., Celletti, A., Galeș, C., Gronchi, G. (eds) Satellite dynamics and space missions. Springer INdAM Series, vol 34, pp. 1–50. Springer, Cham (2019)
Ferraz-Mello, S.: On tides and exoplanets. Proc. Int. Astron. Union 15(S364), 20–30 (2021)
Ferraz-Mello, S., Beaugé, C., Folonier, H.A., Gomes, G.O.: Tidal friction in satellites and planets. The new version of the creep tide theory. Eur. Phys. J. Spec. Top. 229, 1441–1462 (2020)
Folonier, H.A., Ferraz-Mello, S., Andrade-Ines, E.: Tidal synchronization of close-in satellites and exoplanets. III. Tidal dissipation revisited and application to Enceladus. Celest. Mech. Dyn. Astron. 130(12), 78 (2018)
Gevorgyan, Y.: Homogeneous model for the TRAPPIST-1e planet with an icy layer. Astron. Astrophys. 650, A141 (2021)
Gevorgyan, Y., Boué, G., Ragazzo, C., Ruiz, L.S., Correia, A.C.M.: Andrade rheology in time-domain. Application to Enceladus’ dissipation of energy due to forced libration. Icarus 343, 113610 (2020)
Gevorgyan, Y., Matsuyama, I., Ragazzo, C.: Equivalence between simple multilayered and homogeneous laboratory-based rheological models in planetary science. Mon. Not. R. Astron. Soc. 523(2), 1822–1831 (2023)
Goldreich, P.: Final spin states of planets and satellites. Astron. J. 71, 1 (1966)
Kaula, W.M.: Tidal dissipation by solid friction and the resulting orbital evolution. Rev. Geophys. 2(4), 661–685 (1964)
Krupa, M., Szmolyan, P.: Extending geometric singular perturbation theory to nonhyperbolic points–fold and canard points in two dimensions. SIAM J. Math. Anal. 33(2), 286–314 (2001)
Krupa, M., Szmolyan, P.: Relaxation oscillation and canard explosion. J. Differ. Equ. 174(2), 312–368 (2001)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory, vol. 112. Springer (1998)
Laskar, J., Boué, G.: Explicit expansion of the three-body disturbing function for arbitrary eccentricities and inclinations. Astron. Astrophys. 522, A60 (2010)
Love, A.E.H.: Some problems of geodynamics: being an essay to which the Adams Prize in the University of Cambridge was adjudged in 1911. CUP Archive (1911)
Makarov, V.V., Efroimsky, M.: No pseudosynchronous rotation for terrestrial planets and moons. Astrophys. J. 764(1), 27 (2013)
Mathews, P.M., Herring, T.A., Buffett, B.A.: Modeling of nutation and precession: new nutation series for nonrigid Earth and insights into the Earth’s interior. J. Geophys. Res. Solid Earth 107(B4), ETG-3 (2002)
Mignard, F.: The evolution of the lunar orbit revisited. I. Moon Planets 20(3), 301–315 (1979)
Mishchenko, E.: Differential Equations with Small Parameters and Relaxation Oscillations, vol. 13. Springer, London (2013)
Murray, C.D., Dermott, S.F.: Solar System Dynamics. Cambridge University Press (2000)
Ragazzo, C.: The theory of figures of Clairaut with focus on the gravitational modulus: inequalities and an improvement in the Darwin–Radau equation. São Paulo J. Math. Sci. 14, 1–48 (2020)
Ragazzo, C., Boué, G., Gevorgyan, Y., Ruiz, L.S.: Librations of a body composed of a deformable mantle and a fluid core. Celest. Mech. Dyn. Astron. 134(2), 10 (2022)
Ragazzo, C., Ruiz, L.S.: Dynamics of an isolated, viscoelastic, self-gravitating body. Celest. Mech. Dyn. Astron. 122(4), 303–332 (2015)
Ragazzo, C., Ruiz, L.S.: Viscoelastic tides: models for use in celestial mechanics. Celest. Mech. Dyn. Astron. 128(1), 19–59 (2017)
Ragazzo, C., Ruiz dos Santos, L.: Tidal evolution and spin-orbit dynamics: the critical role of rheology. Preprint at arXiv:2402.10875, pp. 1–29 (2024)
Rochester, M.G., Smylie, D.E.: On changes in the trace of the Earth’s inertia tensor. J. Geophys. Res. 79(32), 4948–4951 (1974)
Singer, S.F.: The origin of the Moon and geophysical consequences. Geophys. J. Int. 15(1–2), 205–226 (1968)
Thomson, W.: XXVII. On the rigidity of the Earth. Philos. Trans. R. Soc. Lond. 153, 573–582 (1863)
Acknowledgements
C.R. is partially supported by by FAPESP grant 2016/25053-8. L.R.S. is supported in part by FAPEMIG (Fundação de Amparo à Pesquisa no Estado de Minas Gerais) under Grants No. RED-00133-21 and APQ-02153-23.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no Conflict of interest.
Additional information
Communicated by Marco Antonio Teixeira.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is dedicated to the memory of Prof. Jorge Sotomayor, a teacher and friend. Unlike typical mathematical publications, this paper contains no theorems. Instead, it focuses on applications of methods in Ordinary Differential Equations (ODE), a field where, as CR heard from Prof. J. K. Hale, “techniques such as averaging, normal forms, and challenges like the N-body problem, Hilbert’s XVI problem, and the Lorenz equation, become crucial in research, overshadowing the established general theory.” CR had the honor of collaborating with Prof. Sotomayor for nearly two decades at the Instituto de Matemática e Estatística da Universidade de São Paulo, where our daily interactions were enriched by his humorous insights on life. More than just a brilliant mathematician, he was vivacious, joyful, and optimistic. He often shared a belief that “for a mathematical field to flourish, it must engage with other sciences or mathematical areas”. Prof. Sotomayor’s work in ODEs, a discipline rooted in Isaac Newton’s efforts to solve physical and geometrical problems, significantly advanced both the theoretical aspects of ODEs through his studies on bifurcations and their practical applications, notably in differential geometry’s lines of curvature. His students and friends hope that his legacy endures: to approach ODE with joy and happiness.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ragazzo, C., dos Santos, L.R. Spin–orbit synchronization and singular perturbation theory. São Paulo J. Math. Sci. (2024). https://doi.org/10.1007/s40863-024-00418-7
Accepted:
Published:
DOI: https://doi.org/10.1007/s40863-024-00418-7