
Abstract
In this paper, an asymptotic numerical method based on a fitted finite difference scheme and the fourth-order Runge–Kutta method with piecewise cubic Hermite interpolation on Shishkin mesh is suggested to solve singularly perturbed boundary value problems for third-order ordinary differential equations of convection diffusion type with a delay. An error estimate is derived using the supremum norm and it is of almost first-order convergence. A nonlinear problem is also solved using the Newton’s quasi linearization technique and the present asymptotic numerical method. Numerical results are provided to illustrate the theoretical results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Delay differential equations (DDEs) are differential equations in which the unknown function not only evaluated at present but also evaluated at some past values of the independent variable. DDEs arise in many fields of science and technology such as, mathematical physics, control theory, neural network, medicine, biology, population dynamics model, etc. In the recent past years, the problem of finding numerical solutions for higher order singularly perturbed problems without delay are paid more attention, to cite a few (Cañada et al. 2006; Murray 2002; Kuang 1993).
Nowadays, there has been growing interest for solving higher order singularly perturbed delay differential equation, where the highest order derivative is multiplied by small positive parameter \(\varepsilon \)\((0<\varepsilon \ll 1)\) which contains at least one delay term, called singularly perturbed delay differential equation (SPDDE). This type of differential equation plays a vital role in mathematical modeling of various practical phenomena, such as variational problem in control theory Glizer (2003), predator-prey model Gourley and Kuang (2004), description of human pupil-light reflex Longtin and Milton (1988). It is well-known fact that the solution of the singularly perturbed differential equations with or without delay, generally exhibits boundary layer(s) and interior layer(s). Classical numerical methods for solving such type of problems are known to be inadequate, due to the presence of boundary layer(s) and interior layer(s) when the perturbation parameter tends to zero. It is quite important to adapt the non-classical numerical method called \(\varepsilon \)-uniform numerical method, in which the error bound is independent of the perturbation parameter \(\varepsilon .\)
In the literature, quite a good number of articles have been reported for singularly perturbed higher order ordinary differential equations of convection diffusion and reaction diffusion type without delay. In Chen and Wang (2016) presented numerical methods based on rational spectral collocation in barycentric form with \(\sinh \) transformation. The authors of (Valanarasu and Ramanujam 2007a, b), respectively, applied asymptotic numerical methods for third-order ordinary differential equations of convection and reaction diffusion type problem with discontinuous source term. Whereas Christy Roja and Tamilselvan (2016, 2018) have constructed overlapping Schwarz method for third-order reaction and convection diffusion problem and proved that the method is almost second order convergence. Few authors in the literature have applied some numerical methods for singularly perturbed fourth-order differential equations. To mention a few: Cen et al. (2017) applied higher a order hybrid finite difference scheme on Shishkin mesh for fourth-order singularly perturbed problems (SPPs) and proved that the scheme is almost fourth order. Lodhi and Mishra (2016) applied quintic B-spline method for the system of differential equations and proved that the method is second-order convergence. Chandru and Shanthi (2016) suggested fitted finite difference method on a piecewise uniform Shishkin mesh for convection diffusion turning point problem.
Recently, the authors in Mahendran and Subburayan 2018; Subburayan and Mahendran 2018 applied fitted finite difference methods combined with linear interpolation techniques for third order delay differential equations. As mentioned in the abstract, an asymptotic numerical method combined with fourth-order Runge–Kutta method on Shishkin mesh is suggested to solve the following problem (2)–(3).
The rest of the paper is organized as follows: Sect. 2 presents the statement and the equivalent form of the problem with sufficiently differentiable coefficient functions. The stability results are stated in Sect. 3. Some results pertaining to the given problem (2)–(3) and its auxiliary problem are given in Sect. 4. Section 5 deals with fourth-order Runge–Kutta method with piecewise cubic Hermite interpolation on Shishkin mesh for reduced problem and fitted finite difference scheme for auxiliary problem. Section 6 deals with nonlinear problem. Numerical examples are illustrated in Sect. 7 to validate the theoretical results. The paper is concluded with concluding remarks.
The following notations are used in the rest of the article:
-
\(\varepsilon \) is small parameter such that \(0<\varepsilon \ll 1\).
-
The set (0, 2) is denoted as \(\varOmega \) and its closure is \({\bar{\varOmega }}.\) Further \(\varOmega ^{*}=\varOmega ^{-}\cup \varOmega ^{+},\) where \(\varOmega ^{-}=(0,1)\) and \(\varOmega ^{+}=(1,2).\)
-
\({\bar{\varOmega }}^{N}\) denotes the set of mesh points \(\{x_{0},\ x_{1},\ \ldots ,x_{N}\}.\)
-
The norm \(\parallel \star \parallel \) denotes the supremum norm \(\parallel \psi \parallel _{\omega }=\sup _{x\in \omega }|\psi (x)|.\)
-
The sets \(Y,\ Y^{*},\ Y_{1},\ Y_{1}^{*},\ Y_{2},\) and \(Y_{2}^{*}\), respectively, defined as \(Y=C^{1}({\overline{\varOmega }})\cap C^{2}(\varOmega )\cap C^{3}(\varOmega ),\)\(Y^{*}=C^{1}({\overline{\varOmega }})\cap C^{2}(\varOmega )\cap C^{3}(\varOmega ^{*}),\)\(Y_{1}=C^{0}({\overline{\varOmega }})\cap C^{1}(0, 2]\), \(Y_{1}^{*}=C^{0}({\overline{\varOmega }})\cap C^{1}(\varOmega ^{*}\cup \{2\})\), \(Y_{2}=C^{0}({\overline{\varOmega }})\cap C^{2}(\varOmega )\), and \(Y^{*}_{2}=C^{0}({\overline{\varOmega }})\cap C^{1}(\varOmega )\cap C^{2}(\varOmega ^{*})\).
2 The continuous problem
The works of Valanarasu (2006), Shanthi and Ramanujam (2002) and Valarmathi and Ramanujam (2002) motivate us to consider the following third order SPDDE:
Find \(u\in Y\) such that
where \(a(x)\ge \alpha _{1}>\alpha +2>3,\)\(b(x)\ge \beta _{0}\ge 0\), \(\gamma _{0}\le c(x)\le \gamma \le 0,\)\(\eta _{0}\le d(x)\le 0\), \(2\alpha +24\gamma _{0}+5\eta _{0}>0\) and \(a,\ b,\ c,\ d,\ f\) are sufficiently differentiable on \({\bar{\varOmega }}.\)
The above BVP (1) can be written into the following equivalent problem:
Find \(\overline{u}=(u_{1},u_{2}),\)\(u_{1}\in Y_{1}\), \(u_{2} \in Y_{2}\) such that
\(u_{1}(0)=\phi (0),\)\( u_{2}(0)=\phi ^{\prime }(0),\)\(u_{2}(1-)=u_{2}(1+),\)\( u_{2}^{\prime }(1-)=u_{2}^{\prime }(1+),\)\( u_{2}(2)=\ell ,\) where \(u_{2}(1-)\) and \(u_{2}(1+)\) represent left and right limits of \(u_{2}\) at \(x=1,\) respectively.
3 Stability results
This section presents the maximum principle and stability result for the above problem (2)–(3).
Theorem 1
(Maximum Principle) Suppose that \(\overline{w}=(w_{1},\ w_{2}),\)\(w_{1}\in C^{1}(\varOmega ), w_{2}\in C^{0}(\bar{\varOmega })\cap C^{2}(\varOmega ^{*})\) satisfies \(w_{1}(0)\ge 0\) and \(w_{2}(0)\ge 0,\ w_{2}(2)\ge 0,\)\(P_{1}\overline{w}(x)\ge 0,\)\( \forall x\in \varOmega \cup \{2\} ,\)\(P_{2}\overline{w}(x)\ge 0,\)\(\forall x\in \varOmega ^{*}\) and \(w_{2}^{\prime }(1+)-w_{2}^{\prime }(1-)=[w_{2}^{\prime }](1)\le 0\). Then \(w_{i}(x)\ge 0, \ \forall x\in \overline{\varOmega },\ i=1,2.\)
Proof
Refer [Mahendran and Subburayan (2018), Theorem 3.1]
An immediate consequence of the above theorem is the following stability result.
Corollary 1
For any \({\bar{u}}=(u_{1},u_{2}),\)\(u_{1}\in Y_{1},\)\(u_{2}\in Y_{2}\), and for \(i=1,2\) we have
Proof
Refer [Mahendran and Subburayan (2018), Corollary 3.2]
Note: Using the above result, one can prove that, the solution of the above problem (2)–(3) is unique, if it exists.
4 Analytical results
In this section, we present some analytical results for the solution of the problem (2)–(3).
Consider the reduced problem, find \({\bar{u}}_{0}=(u_{01},u_{02})\), \(u_{01}\), \(u_{02}\)\(\in Y_{1}\) such that
\(u_{01}(0)=\phi (0)\), \(u_{02}(x)=\phi ^{\prime }(x),\ x\in [-1,0].\)
Assume that \(|u^{\prime \prime }_{02}(x)|\le C,\ x\in \varOmega ^{*}.\) The following theorem gives the estimate of \(|u_{k}-u_{0k}|\) for \(k=1 ,\ 2.\)
Theorem 2
Let \({\bar{u}}\) be the solution of the problem (2)–(3) and \({\bar{u}}_{0}\) be its reduced problem solution defined by (4)–(5). Then \(|u_{k}(x)-u_{0k}(x)|\le C_{1}\{{\varepsilon +\varepsilon ^{2-k} \exp (\frac{-\alpha (2-x)}{\varepsilon })}\},\)\(x\in {\bar{\varOmega }}\), \(k=1 ,\ 2.\)
Proof
Refer [Mahendran and Subburayan (2018), Theorem 4.2].
4.1 Auxiliary problem
We now define an auxiliary problem as follows: Find \({\bar{u}}^{*}=(u^{*}_{1}, u^{*}_{2})\), \(u^{*}_{1}\in Y_{1}, u^{*}_{2}\in Y_{2}\) such that
where \(f^{*}(x)={\left\{ \begin{array}{ll} f(x)-d(x)\phi ^{\prime }(x-1),\ x\in (0, 1),\\ f(x)-d(x)u_{02}(x-1),\ x\in [1, 2). \end{array}\right. }\)
Theorem 3
(Maximum Principle) Suppose that \(\overline{w}=(w_{1},\ w_{2}),\)\(w_{1}\in C^{1}(\varOmega ), w_{2}\in C^{0}({\bar{\varOmega }})\cap C^{2}(\varOmega ^{*})\) satisfies \(w_{1}(0)\ge 0\) and \(w_{2}(0)\ge 0,\ w_{2}(2)\ge 0,\)\(P^{*}_{1}\overline{w}(x)\ge 0,\)\( \forall x\in \varOmega \cup \{2\} ,\)\(P^{*}_{2}\overline{w}(x)\ge 0,\)\(\forall x\in \varOmega ^{*}\) and \(w_{2}^{\prime }(1+)-w_{2}^{\prime }(1-)=[w_{2}^{\prime }](1)\le 0\). Then \(w_{i}(x)\ge 0, \ \forall x\in {\overline{\varOmega }},\ i=1,2.\)
Proof
Refer [Valanarasu and Ramanujam (2007a), Theorem 2.2].
Theorem 4
Let \({\bar{u}}\) and \({\bar{u}}^{*}\) be the solutions of the problem (2)–(3) and (6)–(7), respectively. Then \(|u_{k}(x)-u^{*}_{k}(x)|\le C\varepsilon ,\ x\in {\bar{\varOmega }},\)\(k=1,\ 2.\)
Proof
Consider the barrier function \({\bar{\phi }}^{\pm }(x)=(\phi _{1}^{\pm }, \phi _{2}^{\pm })\), where
Now,
Let \(x\in \varOmega ^{-},\) then
Similarly one can prove that \(P^{*}_{2}{\bar{\phi }}^{\pm }(x)\ge 0,\ x\in \varOmega ^{+}.\) Let \(x=1,\) then
Then, by Theorem 3, we have \(\phi _{k}^{\pm }(x)\ge 0, \forall x\in {\bar{\varOmega }}, \ k=1, 2.\) That is, \( |u_{k}(x)-u^{*}_{k}(x)|\le C\varepsilon , \forall x\in {\bar{\varOmega }}.\)
5 The discrete problem
In this section, the fourth-order Runge–Kutta method with piecewise cubic Hermite interpolation on Shishkin mesh is presented for the reduced problem (4)–(5). Further a fitted finite difference scheme for the auxiliary problem for (6)–(7) is also presented.
5.1 Piecewise uniform mesh
The BVP (2)–(3) and the auxiliary problem (6)–(7) exhibit a strong boundary layer at \(x=2\) and weak interior layer at \(x=1.\) Furthermore, \(x=1\) is a primary discontinuous point [Bellen and Zennaro (2003), Section 2.1.1] for the reduced problem (4)–(5). Therefore, we divide the interval into four subintervals, namely \([0, 1-\tau ],\)\([1-\tau , 1],\)\([1, 2-\tau ],\)\([2-\tau , 2].\) where \(\tau =\min \{0.5, \frac{2\varepsilon \ln N}{\alpha }\}.\) Let \(h=4N^{-1}\tau \) and \(H=4 N^{-1}(1-\tau ).\) The mesh \({\bar{\varOmega }}^{N}=\{x_{0},x_{1},\ldots ,x_{N}\}\) is defined by \(x_{0}=0.0\), \(x_{i}=x_{0}+iH, \ i=1,\ldots ,\frac{N}{4},\) \(x_{i+\frac{N}{4}}=x_{\frac{N}{4}}+ih,\ i=1,\ldots ,\frac{N}{4},\)\(x_{i+\frac{N}{2}}=x_{\frac{N}{2}}+iH, i=1,\ldots ,\frac{N}{4},\) \(x_{i+\frac{3N}{4}}=x_{\frac{3N}{4}}+ih,\ i=1,\ldots ,\frac{N}{4}.\)
5.2 Runge–Kutta method with piecewise cubic Hermite interpolation
The fourth-order Runge–Kutta method with piecewise cubic Hermite interpolation [Bellen and Zennaro (2003), Chapter 6] on Shishkin mesh \({\bar{\varOmega }}^{N}\) is applied to obtain numerical solution for (4)–(5). In fact, the numerical solution is given by
where
The following theorem gives the error estimate for the above method (9)–(10).
Theorem 5
Let \({\bar{u}}_{0}(x)\) be the solution of the problem (4)–(5). Further , let \({\bar{U}}_{0}(x_{i})=(U_{01}(x_{i}), U_{02}(x_{i}))\) be its numerical solution defined by (8). Then, \({\parallel {\bar{u}}_{0}-{\bar{U}}_{0}\parallel }_{{\bar{\varOmega }}^{N}}\le C \hbar ^{4},\) where \(\hbar = \max \{h_{i}\}^{N}_{i=1}.\)
Proof
Refer [Bellen and Zennaro (2003), Theorem 6.2.1].
5.3 Fitted finite difference scheme for the auxiliary problem (6)–(7)
On the mesh \({\bar{\varOmega }}^{N},\) we define the following finite difference scheme.
If the exact solution of the reduced problem (4)–(5) is known, then one can use the following scheme:
where
If the numerical solution of the reduced problem is known, then one can use the following scheme:
where
5.4 Discrete stability results
Theorem 6
(Discrete Maximum Principle) Let \({\bar{W}}(x_{i})=(W_{1}(x_{i}),W_{2}(x_{i}))\) be a mesh function satisfying \(W_{1}(x_{0})\ge 0,\)\(W_{2}(x_{0})\ge 0,\)\(W_{2}(x_{N})\ge 0,\)\(P_{1}^{*N}{\bar{W}}(x_{i})\ge 0, \ x_{i}\in (0, 2]\cap {\bar{\varOmega }}^{N},\)\(P_{2}^{*N}{\bar{W}}(x_{i})\ge 0,\ x_{i}\in \varOmega ^{*}\cap {\bar{\varOmega }}^{N}\) and \([D]W_{2}(x_{N/2})\le 0\). Then, \(W_{1}(x_{i})\ge 0\) and \(W_{2}(x_{i})\ge 0\), \(x_{i}\in {\overline{\varOmega }}^{N}\).
Proof
Refer [Mahendran and Subburayan (2018), Theorem 5.1].
A consequence of the above theorem is the following stability result.
Theorem 7
Let \({\bar{U}}^{*}(x_{i})\) be a numerical solution of (6)–(7) defined by either (11)–(13) or (14)–(16). Then
5.5 Error estimates
Theorem 8
Let \({\bar{u}}^{*}\) be the solution of the auxiliary problem (6)–(7) and let \(\bar{U}^{*}(x_{i})\) be its numerical solution defined by (11)–(13). If \(\varepsilon \le C N^{-1},\) then
\(|u^{*}_{k}(x_{i})-U^{*}_{k}(x_{i})| \le CN^{-1}\ln N ,\) \(x_{i}\in {\bar{\varOmega }}^{N},\) \(k=1,2.\)
Proof
Refer [Valanarasu and Ramanujam (2007a), Theorem 5.2].
Theorem 9
Let \({\bar{U}}^{*}(x_{i})\) and \({\tilde{\bar{U}}}^{*}(x_{i})\) be two mesh functions defined by (11)–(13) and (14)–(16), respectively. Then \(\Vert {\bar{U}}^{*}-{\tilde{\bar{U}}}^{*}\Vert _{{\bar{\varOmega }}^{N}} \le C \hbar ^{4},\) where \(\hbar = \max \{h_{i}\}^{N}_{i=1}.\)
Proof
Let \({\bar{Z}}(x_{i})= {\bar{U}}^{*}(x_{i})-{\tilde{\bar{U}}}^{*}(x_{i}).\) Then \(\Vert {\bar{Z}}(x_{0})\Vert =0,\)\(\Vert {\bar{Z}}(x_{N})\Vert =0,\)
Then by the Theorems 5 and 7, we have the desired result.
Theorem 10
Let \({\tilde{\bar{U}}}^{*}(x_{i})\) be a numerical solution of (6)–(7) defined by (14)–(16). Then \(|u^{*}_{k}(x_{i})-{\tilde{U}}^{*}_{k}(x_{i})| \le CN^{-1} \ln N ,\)\(x_{i}\in {\bar{\varOmega }}^{N},\)\(k= 1,2.\)
Proof
Note that,
where \(\hbar = \max \{h_{i}\}^{N}_{i=1}.\)
Theorem 11
Let \({\bar{u}}\) be the solution of (2)–(3) and \({\bar{U}}^{*}\) be its numerical solution defined by (11)–(13). If \(\varepsilon \le CN^{-1},\) then \(|u_{k}(x_{i})-U^{*}_{k}(x_{i})| \le CN^{-1} \ln N ,\)\(x_{i}\in {\bar{\varOmega }}^{N},\)\(k= 1,2.\)
Proof
Let \(x_{i}\in {\bar{\varOmega }}.\) Then,
Which concludes the proof.
Similar to the above theorem, one can prove the following.
Theorem 12
Let \({\bar{u}}\) be the solution of (2)–(3) and \({\tilde{\bar{U}}}^{*}\) be its numerical solution defined by (14)–(16). If \(\varepsilon \le CN^{-1},\) then \(|u_{k}(x_{i})-{\tilde{U}}^{*}_{k}(x_{i})| \le CN^{-1} \ln N ,\)\(x_{i}\in {\bar{\varOmega }}^{N},\)\(k= 1,2.\)
6 Nonlinear problem
Consider the nonlinear BVP
where \({\tilde{u}}^{\prime } (x)=u^{\prime } (x-1),\) with
Assume that the reduced problem
has a solution. Here, the Newton’s method of Linearization discussed in (Valanarasu 2006; Doolan et al. 1980 is applied to linearize the problem. This method yields the sequence \(\{u^{[k+1]}\}_{k=0}^{\infty }\) of successive approximations with a proper choice of initial guess. For each fixed non-negative integer k, \({\bar{u}}^{[k+1]}(x)=(u_{1}^{[k+1]},u_{2}^{[k+1]})\) is the solution of the following linear problem:
where
For convenience, respectively, we denote \(F(x,u_{1}(x),u_{2}(x),{\tilde{u}}_{2}(x)),\)\(F(x,u^{[k]}_{1}(x),u^{[k]}_{2}(x),{\tilde{u}}^{[k]}_{2}(x)),\)\(F_{u_{1}}(x,u^{[k]}_{1}(x),u^{[k]}_{2}(x),{\tilde{u}}^{[k]}_{2}(x)),\)\(F_{u_{2}}(x,u^{[k]}_{1}(x),u^{[k]}_{2}(x),{\tilde{u}}^{[k]}_{2}(x))\) and \(F^{k}_{{\tilde{u}}_{2}}(x,u^{[k]}_{1}(x),u^{[k]}_{2}(x),{\tilde{u}}^{[k]}_{2}(x))\) by F, \(F^{k},\)\(F^{k}_{u_{1}},\)\(F^{k}_{u_{2}}\) and \(F^{k}_{{\tilde{u}}_{2}}.\) To prove the convergence of the successive iteration, the following theorem is established.
Theorem 13
Suppose \(\mid F_{u_{1}u_{1}}\mid ,\)\(\mid F_{u_{2}u_{2}}\mid ,\)\(\mid F_{u_{1}u_{2}}\mid ,\)\(\mid F_{u_{2}{\tilde{u}}_{2}}\mid ,\)\(\mid F_{{\tilde{u}}_{2}{u}_{1}}\mid \) and \(\mid F_{{\tilde{u}}_{2}{\tilde{u}}_{2}}\mid \) are bounded above by \(M<1.\) Let \(\{{\bar{u}}^{[k]}\}_{0}^{\infty }\) be the Newton sequence defined by (21)–(22). Then, for all \(x \in {\bar{\varOmega }},\) we have
Proof
It is easy to see that
and
where \({\bar{\theta }}=(x,\theta , \theta ^{\prime }, \tilde{\theta }^{\prime })\) is such that \((x, u_{1}, u_{2}, {\tilde{u}}_{2})>{\bar{\theta }}>(x, u^{[k]}_{1}, u^{[k]}_{2}, {\tilde{u}}^{[k]}_{2})\).
Then, we have
Then by the Corollary 1, we have the desired result.
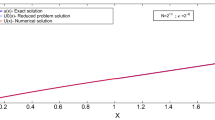
To observe the asymptotic behavior of the solution of the linearized singularly perturbed third-order delay differential equations, we consider the following constant coefficient problem:
The reduced problem solution of the above problem (23)–(24) is
Furthermore, the solution of the problem (23)–(24) is
where \(C^{*}= \varepsilon \exp \left( \frac{-4}{\varepsilon }\right) L_{1}\)
It is observed that,
In the above model problem (23)–(24), we considered third-order convection diffusion problem with constant coefficients and the solution exhibits interior layer at \(x=1\) and boundary layer at \(x=2.\) Figure 1 presents the exact solution and reduced problem solution to (23)–(24) for fixed \(\varepsilon =2^{-5}\) and \(N=2^{7}\).

From the above observation, one can see that the reduced problem solution is a reasonable good approximate solution to the original problem when \(\varepsilon \) is small. Therefore, choose the initial guess as the reduced problem solution, that is, \({\bar{u}}^{[0]}=(u_{1}^{[0]},u_{2}^{[0]})\) and \(u_{1}^{[0]}=u_{0},\)\(u_{2}^{[0]}=u_{0}^{\prime }.\)
From the Theorem 2, we have \(|u_{k}(x)-u_{0k}(x)|\le C \varepsilon ,\ x \in [0, 1],\ k=1, 2. \) Therefore, the above problem (21)-(22) has the following auxiliary problem.
where
7 Numerical illustrations
In this section, we present three examples to illustrate the numerical methods presented in this paper and also to estimate the error and the experiment rate of convergence of the computed solution, we use the double mesh principle for the following test problems. For this, we put \( D_{\varepsilon }^{M}=\max _{0\le i\le M} \mid U_{i}^{M}-U_{2i}^{2M}\mid ,\) where \(U_{i}^{M}\) and \({U_{2i}^{2M}}\) are the \(i^{th}\) components of the numerical solutions on meshes of M and 2M points, respectively. We compute the uniform error and rate of convergence as \( D^{M}=\max _{\varepsilon } D_{\varepsilon }^{M}\ \text {and}\quad p^{M}=\log _{2}\Big (\frac{D^{M}}{D^{2M}} \Big ).\) For the following examples the numerical results are presented for the values of perturbation parameter \(\varepsilon \in \{2^{-4},\ 2^{-5},\ \ldots ,\ 2^{-23}\}\).
Example 1
Consider the BVP
where \(a(x)=16,\)\(b(x)=0,\)\(c(x)=-1,\)\(d(x)=-1,\)\(f_{1}=0,\)\(f_{2}=0;\)\(\phi _{1}=1+x,\)\(\phi _{2}= 1\). Table 1 presents the values of \(D_{k}^{M}\) and \(p_{k}^{M},\ k=1,2\) corresponding to the solution components \(U_{1},\)\(U_{2}\).

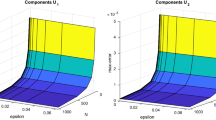
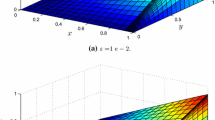
Iterative solutions of \(u_{1}\) of the Example 2

Iterative solutions of \(u_{2}\) of the Example 2
Example 2
Tables 2 and 3 present the iterative numerical solutions (Figs. 2, 3) for \(u_{1}\) and \(u_{2}\) for the fixed value of \(N=32\) and \(\varepsilon =2^{-6}\) and the Table 4 presents the values of \(D_{k}^{M}\) and \(p_{k}^{M},\ k=1,2\) corresponding to the solution components \(U_{1},\)\(U_{2}\).
8 Concluding remarks
Third-order singularly perturbed delay differential equations of convection diffusion type are considered in this article. It is estimated that, \(|u_{k}(x)-u_{0k}(x)|\le C \varepsilon ,\ x\in [0,1].\) Using this result, we obtained the auxiliary problem for the given problem. A fitted finite difference method is applied for the auxiliary problem. Furthermore, it is proved that, the present method is of almost first order convergence. In Subburayan and Mahendran (2018), the authors have applied fitted finite difference scheme with piecewise linear interpolation for the given differential equation, whereas in this article, the interpolation function is applied to calculate the reduced problem solution. The present method can be easily extended to nonlinear problems. Numerical examples are given to illustrate the theoretical results see Tables 1, 2, 3 and 4.
References
Bellen A, Zennaro M (2003) Numerical methods for delay differential equations. Clarendon press, Oxford
Cañada A, Drábek P, Fonda A (eds) (2006) Handbook of differential equations: ordinary differential equations, 1st edn. Elsevier Science, Amsterdam
Cen Z, Aimin X, Le A (2017) A high-order finite difference scheme for a singularly perturbed fourth-order ordinary differential equation. Int J Comput Math. https://doi.org/10.1080/00207160.2017.1339869
Chandru M, Shanthi V (2016) An asymptotic numerical method for singularly perturbed fourth order ODE of convection-diffusion type turning point problem. Neural Parallel Sci Comput 24:473–488
Chen S, Wang Y (2016) A rational spectral collocation method for third-order singularly perturbed problems. J Comput Appl Math 307:93–105
Christy Roja J, Tamilselvan A (2016) Overlapping domain decomposition method for singularly perturbed third order reaction-diffusion problems. Ain Shams Eng J. https://doi.org/10.1016/j.asej.2016.09.018
Christy Roja J, Tamilselvan A (2018) An overlapping schwarz method for singularly perturbed third order convection-diffusion problems. J Appl Math Inform 36:135–154
Doolan EP, Miller JJH, Schilders WHA (1980) Uniform numerical methods for problems with initial and boundary layers. Boole Press, Dublin
Glizer VY (2003) Asymptotic analysis and solution of a finite-horizon \(H_{\infty }\) control problem for singularly-perturbed linear systems with small state delay. J Optim Theory Appl 117:295–325
Gourley SA, Kuang Y (2004) A stage structured predator-prey model and its dependence on maturation delay and death rate. J Math Biol 49:188–200
Kuang Y (1993) Delay differential equations with applications in population dynamics. Academic Press, New York
Lodhi RK, Mishra HK (2016) Solution of a class of fourth order singular singularly perturbed boundary value problems by quintic B-spline method. J Niger Math Soc 35:257–265
Longtin A, Milton J (1988) Complex oscillations in the human pupil light reflex with mixed and delayed feedback. Math Biosci 90:183–199
Mahendran R, Subburayan V (2018) Fitted finite difference method for singularly perturbed delay differential equations of convection diffusion type. Int J Comput Methods 15:1840007-1–1840007-17
Murray JD (2002) Mathematical biology I. An introduction, 3rd edn. Springer, Berlin
Shanthi V, Ramanujam N (2002) Asymptotic numerical methods for singularly perturbed fourth order ordinary differential equations of convection–diffusion type. Appl Math Comput 133:559–579
Subburayan V, Mahendran R (2018) An \(\varepsilon -\) uniform numerical method for third order singularly perturbed delay differential equations with discontinuous convection coefficient and source term. Appl Math Comput 331:404–415
Valanarasu T (2006) An asymptotic numerical initial-value method for a class of singularly perturbed boundary value problems for differential equations. Dissertation, Bharathidasan University
Valanarasu T, Ramanujam N (2007a) An asymptotic numerical method for singularly perturbed third-order ordinary differential equations with a weak interior layer. Int J Comput Math 84:333–346
Valanarasu T, Ramanujam N (2007b) Asymptotic numerical method for singularly perturbed third order ordinary differential equations with a discontinuous source term. Novi Sad J Math 37:41–57
Valarmathi S, Ramanujam N (2002) An asymptotic numerical method for singularly perturbed third-order ordinary differential equations of convection-diffusion type. Comput Math Appl 44:693–710
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Corina Giurgea.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Subburayan, V., Mahendran, R. Asymptotic numerical method for third-order singularly perturbed convection diffusion delay differential equations. Comp. Appl. Math. 39, 194 (2020). https://doi.org/10.1007/s40314-020-01223-6
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-020-01223-6
Keywords
- Third-order differential equations
- Convection diffusion equation
- Boundary value problem
- Singularly perturbed problem
- Shishkin mesh
- Delay differential equations
- Asymptotic numerical methods