
Abstract
Total hip arthroplasty (THA) is a successful surgical method for hip replacement but still poses challenges and risks. Robotic-assisted THA (rTHA) using new generation robotic systems has emerged to improve surgical precision and outcomes. The purpose of this paper is to review the literature on rTHA, with a focus on its advantages, such as individualized preoperative planning, intraoperative assistance, and improved accuracy in implantation, especially in complex cases. Additionally, it aims to explore the disadvantages associated with the use of rTHA, including high costs, the learning curve, and prolonged operation time compared to manual THA (mTHA), which are critical drawbacks that require careful consideration and efforts for minimization. Some financial analyses suggest that rTHA may offer cost-effectiveness and reduced postoperative costs compared to mTHA. While technological advancements are expected to reduce technical complications, there are still debates surrounding long-term outcomes. Practical limitations, such as limited availability and accessibility, also warrant attention. Although the development of rTHA shows promise, it is still in its early stages, necessitating critical evaluation and further research to ensure optimal patient benefits.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Total hip arthroplasty (THA) has been a highly successful surgical method in the field of hip replacement for the past 50 years [1]. Despite improvements in complication rates, morbidity, and mortality, THA remains a challenging procedure with significant risks. The recovery period for THA patients can be difficult, involving joint stiffness, weakness, impaired ambulation, and postoperative pain that may require long-term analgesic use [2,3,4]. Orthopedic surgeons have made efforts to reduce complications and improve outcomes in THA.
According to Jacofsky and Allen [5], industries go through five phases of development, including the healthcare industry. Currently, the healthcare industry is in the third stage, which involves the development of standardized procedures and templates. Robotic technology has been introduced in orthopedic surgery, including THA, with the aim of improving surgical precision and alignment. Various forms of robot-assisted orthopedic surgery, such as robotic arms, robotic-guided cutting jigs, and robotic milling systems, have been developed and used clinically.
The indications for robotic surgery have expanded, and it has gained attention due to supporting literature. However, questions remain regarding whether robotic-assisted THA (rTHA) consistently produces better outcomes compared to manual THA (mTHA). Challenges such as high costs and the learning curve associated with robotic surgery contribute to these uncertainties. This paper aims to discuss the history of robotic technology, its current role and usage in THA, outcomes, challenges, and future directions.
2 Material and methods
This study did not require approval from an ethics committee or institutional review board due to the utilization of publicly available data. A computerized electronic search of databases including Google Scholar, PubMed, Medline, and Embase was conducted using keywords such as 'Robotic-assisted total hip arthroplasty', 'Robotic total hip arthroplasty', 'robotic-assisted hip surgery', and 'Robotic orthopaedic surgery'.
2.1 History
The use of rTHA can be categorized based on the level of control exerted by the surgeon: active, semi-active, or passive. In a passive system, the surgeon directly performs the surgery without any feedback loop. An active system performs predefined bony preparation or implantation based on preoperative planning. In a semi-active system, the surgeon participates while receiving real-time intraoperative feedback through a haptic feedback loop[6].
The first rTHA was called ROBODOC, introduced in the early 1990s by THINK Surgical[7, 8]. The ROBODOC system was autonomous and performed procedures without direct guidance from the surgeon. Navigation pins were inserted into the femur, and a CT scan reconstructed the bony anatomy[9]. The system autonomously prepared the femur neck and canal for implantation of the stem[10]. Clinical trials conducted from the early 1990s onwards demonstrated improved positioning of the femoral component[7, 9, 11]. However, the system faced complications and legal issues, leading to a group lawsuit in Germany in 2004[12,13,14]. The original company was acquired and rebranded as Think Surgical Inc., now offering the next-generation active ROBODOC system called TSolution-One, expanding its application to total knee arthroplasty[15].
Another rTHA is CASPAR, introduced in Germany in the 1990s by Universal Robot Systems. CASPAR involved preoperative planning based on CT imaging, followed by femur canal milling and stem positioning guidance. Studies showed significant accuracy in cadaveric femurs[16], but later studies revealed discrepancies between preoperative planning and actual measurements, indicating low precision[17]. CASPAR had longer surgical times, increased blood loss, and inferior functional outcomes[18]. The company eventually went out of business, and CASPAR is no longer in use[5].
To address the drawbacks of active systems, semi-active systems were developed, requiring more surgeon participation. The first system in this category was ACROBOT, which developed a surgical arm that moved within predefined limits to assist the surgeon[19]. ACROBOT was acquired by Stryker Ltd., the developer of the MAKO robotic-arm-assisted system[6].
The MAKO robot, a semi-active system, uses a 3D model generated from preoperative CT scans for planning and provides haptic feedback to the surgeon[20, 21]. It can give tactile resistance and warnings if predefined boundaries are exceeded. The first MAKO robotic-assisted THA was performed in 2010, and the system received FDA approval in 2015. MAKO Surgical Corp. was acquired by Stryker Corp.
2.2 Robotic-assisted THA surgical technique
Based on the information obtained from the literature, which aligns with the methodology of this paper, the available resources primarily focus on MAKO and ROBODOC systems [22]. A concise introduction to the surgical techniques of these two systems, which are classified as active and semi-active, will be provided respectively.
2.2.1 (1) ROBODOC
The system comprises ORTHODOC, a computer workstation with preoperative planning software, and a robotic arm equipped with a high-speed milling device. The surgeon utilizes ORTHODOC to visualize the patient's hip and knee in three orthogonal views [13]. Using preoperative CT images, ORTHODOC performs 3D planning, enabling the selection of an appropriate femoral component. The optimized data is then transmitted to the ROBODOC. After securely fixing the patient's bone to the ROBODOC machine, the femoral canal is precisely milled using the calibrated milling bar. Calibration aligns the real implants' position with their geometric computer model, while registration aligns the preoperative planned information with the patient's actual position in the surgical field [23, 24]. This ensures accurate execution of the surgical plan.
Registration in the ROBODOC system can be categorized into two methods: pin-based and pin-less [25]. In the earlier stages of ROBODOC's development, fiduciary markers in the form of titanium screws were inserted into the patient's femur during a separate outpatient surgery. These screws were placed at specific locations, including the medial and lateral femoral condyles and the greater trochanter [11, 26]. In 1998, the number of fiduciary markers was reduced to two by extending a single pin into the condyles, achieving the same registration accuracy. While this fiduciary marker-based method was highly accurate[13, 27], it required an additional procedure under local anesthesia prior to the THA, resulting in discomfort and pain at the screw insertion sites [28].
To address these issues, ROBODOC introduced the DigiMatch Technique in 1999, eliminating the need for fiduciary markers. Instead, an optical sensor and a probe were used to match the patient's bony landmarks with the computer model's surface. A study comparing the traditional pin-based method with the DigiMatch Technique demonstrated the safety and effectiveness of the latter [29]. In the DigiMatch Technique, corresponding points on the computer model and the surface points measured by the surgeon are matched through iterative calculations, reducing the average distance between each corresponding point and improving accuracy. This alignment ensures that the surface data collected during surgery aligns with the preoperative image-measured bone surface model [26].
Currently, the pin-less method is predominantly used due to the issues associated with the pin-based approach. However, the pin-based method can still be selectively employed for patients with femoral head fractures or those with existing metal materials in the bone [25].
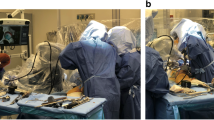
For example, when performing THA using a posterolateral approach in the lateral decubitus position, the leg is dislocated and firmly fixed in a holder at the level of the lesser trochanter. Once calibration and registration are completed, the robotic arm of the system, such as ROBODOC or TSolution-One, begins the milling process for femoral implants. A bone motion monitor is integrated into the machine, which immediately stops the milling if any movement of the femur is detected intraoperatively. Although the surgeon can manually stop the machine if necessary, the robot can only follow pre-programmed cut paths and lacks the ability to make intraoperative adjustments. If the surgeon is dissatisfied with the robot's performance, the only option is to convert to mTHA. After the milling process is completed, the robot is detached and moved away from the femur. The femoral neck osteotomy is manually performed using a saw at the previously created notch level. Subsequently, traditional methods are employed for acetabulum reaming, and the THA procedure continues accordingly.
In the TSolution-One system, similar to ROBODOC, the TPLAN preoperative planning software is utilized for accurate surgical planning. Additionally, the TCAT (Think Surgical Inc.) component of TSolution-One enables precise milling and reaming. TCAT includes the TCAT arm for controlling actual movement, a cutting tool known as a tip, a digitizer, a monitor, and a bone motion monitor. The digitizer collects the patient's anatomy data to ensure accurate surgical implementation and precise positioning. Similar to ROBODOC, the bone motion monitor in TCAT halts the machine if any movement of the femur is detected intraoperatively [25].
2.2.2 (2) MAKO
A preoperative CT scan is essential for utilizing the MAKO system in surgery. It allows the MAKO product specialist to reconstruct the unique three-dimensional anatomical structures of the patient's femoral and pelvic bones using software (Fig. 1). This reconstruction aids the surgeon in preoperative planning, including determining implant size, type, and positioning [30]. Precise calculations of the acetabular cup's size, position, inclination, anteversion, as well as the femoral stem's size, head length, offset, and leg length discrepancy can be made (Figs. 2, 3).

MAKO product specialist's reconstruction of three-dimensional anatomical structures using preoperative CT scan images

The screen showing the surgeon pre-setting the size, position, inclination, and anteversion of the cup before reaming the acetabulum

The screen showing the preoperative confirmation of femoral stem size, offset, version before femoral neck cutting
The choice of surgical approach depends on the surgeon's preference. For example, in a posterior approach, the patient is positioned in the lateral decubitus position. Three navigation thread pins are sequentially inserted into the thicker part of the iliac crest, spaced 1 cm apart, about 2–3 cm away from the anterior superior iliac spine on the ipsilateral side. These pins are connected to an array for the infrared camera, which registers the patient's pelvic bone with the MAKO software[20, 31]. It is crucial to securely fix the pins deep into the iliac crest to avoid any movement during surgery, as this can lead to errors in the MAKO system's calculations [32]. In the direct anterior approach, the patient remains supine position, and the incision is slightly oblique, directed towards the distal thigh to reduce muscle tension and expose the trochanter region [32]. Unlike the posterior approach, the pins are fixed to the contralateral side of the iliac crest, and the array is connected to the pins to register the pelvic bone in the MAKO system.
Once the registration of the pelvic bone is complete, the surgery begins. After routine exposure, a screw is inserted at the position of the greater trochanter before opening the capsule. Another screw is inserted parallel to the subsequent reaming direction, at the 12 o'clock position of the acetabulum's rim. While robotic navigation can support femoral neck cutting, the cutting itself is performed manually. The femoral version is determined virtually and then confirmed by the robot. Using the screw at the greater trochanter as a reference point, the surgeon contacts the probe to assist the robot in determining the cutting level. The cutting line is marked using electrocautery or a surgical marker, and the cutting is performed. The procedure then enters the acetabulum registration phase, which is the most challenging and time-consuming step in MAKO robotic surgery [30]. During the acetabulum registration, the surgeon ensures that the probe touches the bony part of the acetabulum, passing through the cartilage. The goal is to match as many as possible of the 15 points on the inner and outer sides of the acetabulum with high precision to obtain accurate data. Once the registration is complete, the robotic arm is connected to a reamer that matches the planned cup size, and reaming is performed. The MAKO system provides haptic feedback to enhance surgical accuracy through auditory, tactile, and visual cues [6]. During the surgery, the surgeon can request adjustments to the inclination and version from the MAKO product specialist present in the operating room, either before or during the reaming process.
The utilization of the MAKO system in surgery allows for the assessment of implant stability, inclination, anteversion and depth in real-time during the procedure. Prior to surgery, a knee checkpoint is placed to measure the distance between the screw inserted at the greater trochanter and the knee checkpoint immediately after implant insertion. This measurement facilitates the instant determination of leg length difference between preoperative and postoperative stages. Furthermore, real-time monitoring through various tools enables direct verification of the deepening, anteversion, and inclination of the acetabular cup. These capabilities enhance the surgeon's ability to achieve precise implant placement and optimize surgical outcomes (Fig. 4).

The real-time screen allowing the intraoperative visualization of the final positions of all implants (including acetabulum cup size, position, inclination, and anteversion, as well as femoral stem size, offset, postoperative leg length discrepancy, and combined offset) after their insertion
2.3 Advantages
2.3.1 (1) Accuracy of implantation
Improper positioning of the acetabular cup in THA can lead to significant complications such as dislocation, impingement, and accelerated liner wear [33,34,35,36]. To prevent these complications, surgeons determine the "safe zone" defined by Lewinnek et al.[37] prior to surgery. The safe zone includes a inclination angle of 30–50 degrees and an anteversion angle of 5–25 degrees, or according to Callanan et al.[38], an inclination angle of 30–45 degrees and an anteversion angle of 5–25 degrees [39]. Another factor to consider is the combined anteversion, which takes into account the version of both the femoral stem and the acetabular cup, and should also be considered before surgery [40]. Literature reports significant variations in native femoral version and rotation among individual patients [41,42,43]. Determining the ideal and patient-specific combined anteversion is challenging and complex [43, 44]. Furthermore, the importance of preoperative planning systems considering spinopelvic mobility, rather than solely focusing on hip anatomical restoration, has been recognized for successful THA. Spinopelvic mobility encompasses the complex relationship between the spine, pelvis, and hip. Patients with arthritis or other conditions may exhibit hypermobility or rigidity, leading to abnormal spinopelvic alignment or sagittal imbalances between sitting and standing [45]. This subgroup of patients with abnormal spinopelvic alignment or sagittal imbalances, particularly those with a history of surgical spinal fusion or hypermobility, are at a higher risk of dislocation resulting from malpositioning of the acetabular cup [46,47,48].
Due to these factors, quantifying and planning spinopelvic relationships in minimally invasive THA is challenging. However, with the advancement of robotic technology, calculating spinopelvic parameters can greatly assist in restoring native pelvic kinematics [20, 49, 50]. Numerous studies have demonstrated the high accuracy of acetabular cup implantation with semi-active systems, particularly the MAKO system.
Nawabi et al. [51] found in their initial study that the position of the acetabular cup in rTHA was significantly more accurate compared to cups transplanted in mTHA. Elson et al.[52], in a multicenter clinical trial involving 119 patients who underwent rTHA, demonstrated that both inclination and anteversion of the acetabular cup were within the generally accepted safe zone in all cases. The same group presented data showing that in rTHA surgery, the proportion of cases with cup position within 4 degrees of the planned position was 95% [53]. In a matched control study by Domb et al. [54] involving 100 THA cases, rTHA patients were reported to have 100% of cups located within the safe zone, while only 80% of cups in mTHA cases were within the safe zone. The same group performed a retrospective review of 1,980 cases and reported that consistent placement of the acetabular cup within the safe zone was more frequently achieved in rTHA [55]. Tsai et al.[56] conducted a postoperative CT study comparing patients who underwent rTHA and mTHA, and they found a significant increase in combined anteversion by 19.1 ± 11.7° and a decrease in cup inclination by 16.5 ± 6.0° in rTHA, whereas in mTHA patients, an increase in combined anteversion by 23.5 ± 23.6° and a decrease in cup inclination by 10.2 ± 6.8° were observed. Although there was minimal difference in the direction of component orientation between the two groups, the high precision of rTHA was evaluated to have the potential for restoring the original hip joint morphology.
Kamara et al. [57] conducted a retrospective cohort review comparing three patient groups: 100 patients who underwent fluoroscopic-assisted anterior approach, 100 patients who received rTHA, and 100 patients who received mTHA. The proportion of cases achieving component placement in the target zone was 76% in mTHA, 84% in fluoroscopic-assisted anterior approach, and 97% in rTHA. The authors concluded that rTHA provides significant and immediate improvements in the accuracy of acetabular cup placement. In a study by Illgen et al. [58] on rTHA, the accuracy of acetabular cup positioning within the safe zone was reported to be increased by 71% compared to mTHA, indicating a lower dislocation rate in patients. Stewart et al. [59], in a retrospective study by a single surgeon, included 100 cases of fluoroscopic-assisted THA and 100 cases of rTHA, and they reported a statistically significant difference in acetabular inclination error between the rTHA group (3.8 degrees) and the fluoroscopic-assisted THA group with an average inclination error of 4.63 degrees(P < 0.01). According to Foissey et al. [60], the rTHA group showed superior adjustment with 98% of cups positioned in the safe zone compared to only 68% in the mTHA group (p = 0.0002). Additionally, the changes in the rotation center were more effectively restored on average in the rTHA group (horizontal changes of the rotation center: −5.0 ± 5.0 vs. −3.4 ± 4.9, p = 0.03; vertical and horizontal changes of the rotation center: 1.6 ± 3.3 vs. 0.2 ± 2.7, p = 0.04). In addition to this, several studies comparing rTHA using MAKO with mTHA have reported statistically significant accuracy in acetabular cup inclination and anteversion [48, 61,62,63,64,65,66].
Similarly, there are numerous studies that suggest the implantation of the femoral stem using active systems such as ROBODOC and CASPAR is performed more accurately compared to mTHA. According to Bargar et al. [13], a study involving 136 total hip arthroplasty procedures conducted at three centers in the United States compared 65 ROBODOC patients with 62 patients in a manual THA control group. The study demonstrated significantly superior results in terms of medial fit, lateral fit, and fill of the femoral stem in the ROBODOC patients. In the pioneering prospective study on ROBODOC by Honl et al. [14], it was concluded that the varus-valgus orientation of the stem (mean angle between the femur and the shaft of the prosthesis) was better after the robotic procedures (0.34° ± 0.67° compared with 0.84° ± 1.23°, p < 0.001). This finding is supported by other studies as well [67, 68].
Schneider and Kalender [69] conducted a study comparing the overall geometric accuracy of robotic-assisted THA between ROBODOC and CASPAR systems, and concluded that they had similar results within a standard deviation of 0.5 mm and 0.3° in critical directions. According to Wu et al. [16], CASPAR group showed an average percentage of bone contact reaching 93.2% (ranging from 87.6 to 99.7%); the average gap percentage was 2.9% (ranging from 0.3 to 7.8%); the maximum gap width was 0.81 mm, and the average gap width was only 0.20 mm. In the manual group, bone contact reached 60.1% (ranging from 49.2 to 70.4%); the average gap percentage was 32.8% (ranging from 25.1 to 39.9%); the maximum gap width was 2.97 mm, and the average gap width was 0.77 mm. Similar results were found in other study as well [70].
2.3.2 (2) Leg-length discrepancy
In Love’s [71] study, it is believed that patients will perceive a difference in leg length when there is a discrepancy of 10 mm or more in shortening or 6 mm or more in lengthening. The occurrence of leg length discrepancy (LLD) emphasizes the importance of accurate implant positioning, as it can lead to decreased clinical outcomes, patient dissatisfaction, and become a common reason for orthopedic surgeons to face lawsuits [72, 73]. Therefore, the ability of robot-assisted THA developers to emphasize the intraoperative measurement of LLD with high accuracy becomes a significant advantage.
According to Honl et al. [14], LLD results were superior in rTHA group (mean discrepancy, 0.18 ± 0.30 compared with 0.96 ± 0.93 cm, p < 0.001). Nakamura et al. [74] conducted a study on over 146 THA patients followed for more than 5 years and concluded that the rTHA group showed a significant reduction in LLD variation. In Nawabi et al.'s [51] study, the average error in LLD was within 1 mm. In a matched-control study by Domb et al. [54] involving 100 THA cases, they compared leg length discrepancies between fluoroscopic-assisted anterior approach THA and posterior approach THA, finding that both groups had similar LLD and outlier rates, and concluded that rTHA was accurate in this aspect. A retrospective review of 1980 cases performed by the same group showed comparable rates and acceptable ranges of LLD in all treatment groups [55], and other studies supported these findings [50, 63, 64, 68, 75].
2.3.3 (3) Bone stock preservation
Due to the increasing need for revision in THA, bone stock preservation has become a crucial factor. When femoral and acetabular bones are well-preserved, there are significant advantages in terms of post-implantation stability. In cases where bone stock is insufficient, the use of shorter stem implants has been employed as a solution[76, 77]. Hananouchi et al. [78] conducted a DEXA study and reported that robotic milling in rTHA using ROBODOC facilitates superior load transfer and is effective in minimizing bone loss in cementless stems. According to a recent study by Suarez-Ahedo et al. [79], comparing 57 rTHA cases using the MAKO system with a mTHA control group, the size of the acetabular cup was significantly smaller in rTHA, measured by the ratio of cup-to-femoral head diameter and the difference between cup and femoral head diameter (p < 0.02). Cup size was used to measure bone loss during THA surgery, and the authors concluded that with the assistance of the MAKO system, bone stock preservation can be improved intraoperatively.
2.3.4 (4) Clinical Outcomes
Bargar et al. [13] reported that during a 1-year and 2-year follow-up period at a US center, there were no statistically significant differences in the Harris Hip Score (HHS) and duration of hospital stay between rTHA and mTHA. However, a German study reported that among 42 patients who underwent both THA procedures, the HHS increased from 43.7 to 91.5. In a recent long-term study with an average follow-up period of 14 years, Bargar et al. [11] reported that patients who underwent rTHA using the ROBODOC system had significantly higher HHS and Health Status Questionnaire scores compared to those who underwent manual THA. However, the Western Ontario and McMaster Universities Osteoarthritis Index (WOMAC) scores were lower in the rTHA group, although they were considered to be smaller than the minimally clinically important difference. Honl et al. [14] reported that the rTHA group showed better Mayo clinical scores at 6 months and 12 months, as well as better HHS at 12 months. However, there were no differences in any scores among the three groups at 24 months. Nishihara et al. [67] found no difference in the time taken to walk 500 m between the two groups. However, the rTHA group had a significantly higher number of patients walking 6 blocks within 13 days after surgery, indicating a statistically significant difference. Although there was no difference in the Merle D'Aubigne hip score before surgery or at 3 months after surgery between the two groups, the robotic group showed significant improvement after 2 years, suggesting potential benefits in early postoperative rehabilitation and long-term outcomes. According to Nakamura et al. [74], the results of rTHA using ROBODOC showed superior Japanese Orthopaedic Association clinical scores at 2 years and 3 years, but no significant differences were observed after 5 years.
Perets et al. [80] presented a clinical outcome study, including a minimum 2-year follow-up of rTHA performed using the MAKO system. The mean HHS was 91.1, and the mean Forgotten Joint Score (FJS) was 83.1, indicating better results compared to the mTHA group. Banchetti et al. [81] conducted a study with 220 randomly selected patients (100 in the MAKO rTHA group and 120 in the mTHA group) from a total of 376 patients in three hospitals. They reported statistically and clinically significant improvement in all post-operative patient-reported outcome measures (PROMs) scores for both surgical procedures (P < 0.001). In a propensity score-matched study by Domb et al. [82], comparing 66 patients who underwent rTHA and 66 patients who underwent mTHA with a minimum follow-up period of 5 years, the rTHA group showed significantly higher HHS, FJS, and Veterans RAND 12 Physical (VR-12 Physical) scores. Clement et al. [75] evaluated 40 patients who underwent rTHA and 80 patients who underwent mTHA with an average follow-up period of 10 months. The rTHA group had significantly higher Oxford Hip Scores (OHS) (p = 0.038) and FJS (p < 0.001) after surgery, and the smaller standard deviations in these groups indicated more reliable result distribution compared to the traditional group. In a retrospective case–control study by Coulomb et al.[83], the rTHA group (n = 98) and the mTHA group (n = 98) were matched, and the Hip Disability and Osteoarthritis Outcome Score (HOOS), FJS, and OHS were compared for 1 year after surgery. The results showed that the rTHA group had significantly higher FJS and OHS scores compared to the mTHA group (82.1 ± 22.3 and 40.8 ± 8.8 vs. 71.2 ± 27.8 and 38.1 ± 9.7, respectively; p = 0.004 and p = 0.043). However, there was no difference in HHS between the two groups (85.9 ± 15.8 vs. 85.8 ± 13.3; p = 0.962).
However, comparing the clinical outcomes of rTHA to traditional mTHA remains a complex and challenging task, despite the research findings from these studies. This is primarily due to the historical success and favorable evaluation of mTHA as a well-established surgical procedure, as well as numerous studies reporting a lack of "significant" differences[10, 68, 84,85,86]. For these reasons, it is important to approach the comparison of clinical outcomes with caution as research on rTHA continues to evolve and progress.
2.4 Disadvantages
2.4.1 (1) Operative time and blood loss
Bargar et al. [13] reported that the rTHA group had a significantly longer duration of surgery (258 min) compared to the mTHA group (134 min), and there was also a higher amount of blood loss. Honl et al. [14] reported that the rTHA procedure had a longer surgical time compared to mTHA (mean and standard deviation, 107.1 ± 29.1 min vs. 82.4 ± 23.4 min, p < 0.001). In Nakamura et al.'s [29] study, even in rTHA using ROBODOC, the DigiMatch technique group (146 min) was found to have a longer surgical time than the pin-based group (121 min) (P < 0.001). Similar findings were observed in several other studies[54, 64, 68]. Bukowski et al. [87] reported that while the surgical time was prolonged in the rTHA group compared to mTHA group (131 ± 23 min vs. 122 ± 29 min, respectively, p = 0.012), there was a significant decrease in blood loss (374 ± 133 mL vs. 423 ± 186 mL, p = 0.035). One source, CASPAR, reported that rTHA had longer surgical time and greater blood loss compared to mTHA [88].
2.4.2 (2) Learning curve
Nakamura et al. [74] calculated the Pearson correlation coefficient for consecutive rTHA surgeries, with an average surgical time of 120 min for rTHA and 108 min for mTHA. They found a decrease in time of 17 s for each case starting from an initial time of 140 min (r2 = 0.054). Redmond et al. [89] analyzed the first 105 rTHA cases performed by a single surgeon and reported a significant decrease in surgical time and incidence of incorrect acetabular cup implantation with increasing surgical experience (p < 0.05). Heng et al. [90] conducted a retrospective review of 45 patients in the rTHA group and 45 patients in the mTHA group, both performed by a single surgeon. The average surgical time for the rTHA group was 96.7 min, while the mTHA group was 84.9 min. However, they observed that rTHA surgeries were approximately 1 min shorter than previous surgeries, with the average time decreasing to 82.9 min in the last 10 cases.
In a cohort study, involving 100 patients operated by a single surgeon, they reported that it took 14 surgeries to become proficient in rTHA [91]. Similarly, a prospective cohort study, performed by a single surgeon, indicated that it took 12 cases to achieve the learning curve for acetabular cup positioning in a cohort of 50 rTHA and 50 mTHA patients [92]. Tian et al. [93] found no significant differences in LLD, hip offset, or accuracy of acetabular prosthesis position between the groups. However, there was a significant difference in the proportion of acetabular prostheses located in the safe zone, with 90.5% in the rTHA group and 77.5% in the mTHA group (P < 0.05). They also observed a difference in acetabular anteversion, with the rTHA group at 19.96 ± 5.68 and the mTHA group at 17.84 ± 6.81 (P = 0.049). They stated that the surgical team required 17 surgeries to become skilled in the procedure [93]. In most of the discovered literature, it was mentioned that 12 to 17 cases are typically required to achieve the learning curve.
2.4.3 (3) Technical complications
Honl et al.[14] reported that out of 74 rTHA surgeries using ROBODOC, 13 cases (18%) had to be converted to manual insertion due to system failures. Schulz et al.[10] reported that among 97 cases of rTHA using ROBODOC, 9 cases (9.3%) experienced technical complications directly related to the robotic-arm system. Among these cases, 5 required surgical interruption and re-registration due to bone motion detected by the bone motion monitor. In 2 cases, femoral shaft fissures occurred, necessitating intraoperative wire cerclage. One case involved damage to the acetabular rim caused by the milling device, while another case resulted in a defect in the greater trochanter. Conversely, Domb et al. [54] stated that out of 50 rTHA cases using MAKO, technical complications occurred in only one case.
2.4.4 (4) Complications
Honl et al. [14] reported a higher incidence of heterotopic ossification (HO) in the rTHA group after 6 months. However, a meta-analysis which included this study, found no significant difference between the rTHA group and the mTHA group [84]. Nakamura et al. [74] indicated a higher occurrence of HO in the rTHA group using ROBODOC, but this difference was not statistically significant. Marcovigi et al. [94] conducted a study on 1,059 patients, including 323 patients using the anterior approach, 394 patients using the lateral approach, and 342 patients using the posterior approach with MAKO from 2014 to 2019. After applying exclusion criteria, they reported three cases of dislocation (two cases in the posterior approach and one case in the anterior approach), with a dislocation rate of 0.28% and an incidence rate of 0.14%. In an in vitro experiment conducted by Nogler et al. [95], using ROBODOC for rTHA, it was suggested that without intraoperative irrigation, the temperature could rise up to 172 °C, indicating a possibility of thermonecrosis.
2.4.5 (5) Financial cost
One of the primary concerns when implementing such innovative technology is the issue of cost. In the case of rTHA systems, several cost factors need to be considered, including the initial installation and software setup costs, annual service fees payable to the manufacturer, expenses related to setting up a new surgical suite and recruiting appropriate personnel, additional costs associated with additional imaging studies, and the cost of disposable instruments used during the procedure (including screws and arrays), which are not incurred in mTHA. The ROBODOC system was initially introduced in Europe in the 1990s with a price tag of $635,000, and some users have reported paying up to $1.5 million for the system [96]. Currently, companies producing robotic systems report starting costs of over $1 million, which do not include the cost of implants, disposable instruments, annual service, and maintenance fees [31]. According to a study by Kirchner et al. [97], using the National Inpatient Sample dataset that included over 35 million hospital discharges between 2010 and 2014, when 758 rTHA patients were matched with 758 mTHA patients out of a total of 946 rTHA patients and 292,836 mTHA patients, the risk of major complications was similar between the two groups. However, in this study, the mean hospitalization cost for the rTHA group was significantly higher at $20,046 (standard deviation = $6,165) compared to $18,258 (standard deviation = $6,147) for mTHA (P < 0.001). The average length of hospital stay for the rTHA group was reported to be 2.69 days (standard deviation = 1.25), which was shorter than the 2.82 days (standard deviation = 1.18) for the mTHA group (P < 0.001)[97].
2.4.6 (6) Radiologic exposure
In the previous study, it was mentioned that in the case of rTHA, unlike mTHA, there is a necessity for preoperative CT scans, which increases the patient's radiologic exposure by nearly three times [20]. However, Booij et al. [98] also mentioned that new scanning techniques can reduce radiologic exposure during scans while maintaining image quality. From the perspective of surgeons, it has been observed that performing rTHA results in significantly lower radiologic exposure compared to performing fluoroscopic-assisted THA.
3 Discussion
This study, based on a review of the literature on Robotic-assisted THA, confirms the emergence of new generation robotic systems such as MAKO and TSolution-One, which are commonly used in clinical practice, leaving behind the complications and failure models encountered in the early stages. The use of rTHA, which involves individualized preoperative planning based on each patient's anatomy and intraoperative assistance from a robotic arm, has already been proven as an effective tool in improving the accuracy of implantation and minimizing errors caused by human factors such as limb length discrepancy and excessive bone resection. These advantages are particularly evident in challenging cases where preoperative planning or intraoperative surgical procedures are difficult. Gupta et al. [99] reported that rTHA demonstrated higher accuracy in obese patients, and other studies have suggested that it can improve accuracy in patients with a higher body mass index [86]. Ando et al. [100] found high accuracy in acetabular cup positioning in patients with developmental dysplasia of the hip, a result also supported by Sato et al. [101].
While the use of rTHA may become inevitable in the near future due to these advantages, the clear benefits of this technology are still a subject of debate, and minimizing disadvantages remains an important task. One study reported that the assistance of a robot is particularly beneficial for inexperienced surgeons, as it can mitigate the learning curve in orthopedic specialists [102]. From the perspective of financial costs, which is a crucial issue, Maldonado et al. [103] based on data from the U.S. health insurance system claimed that rTHA patients are much more cost-effective. They evaluated costs associated with infection, dislocation, major complications, and revisions over a five-year period, and overall, they saved $945 compared to the mTHA group, with potential savings of up to $1,810 for privately insured patients. According to Pierce et al. [104], rTHA patients incurred significantly lower costs for post-index inpatient rehabilitation or skilled nursing facility admissions and used fewer home health agency visits compared to mTHA patients. They reported a cost reduction of US$785 over a 90-day postoperative period (p = 0.0095). Barsoum et al. [105] also found that the 90-day care costs were $1,573 lower in the rTHA group compared to the mTHA group (p < 0.0001). The total index costs were also significantly lower in the rTHA group compared to the mTHA group (p < 0.0001).
Technical complications and operative time are expected to decrease as the technology advances. However, the long-term outcomes of arthroplasty only become clear after several decades, and the final decisions regarding patients' clinical outcomes will be made as more clinical data accumulates, leaving room for ongoing controversy. Alongside various limitations regarding the standardized use of robots in all hip joint types and pathologies, there are practical issues such as limited availability in only a few institutions and difficult accessibility for many surgeons to robotic systems.
4 Conclusion
rTHA offers individualized preoperative planning, intraoperative assistance, and improved accuracy in implantation, especially in challenging cases. However, there is still ongoing debate regarding the clear benefits and clinical outcomes of this technology, emphasizing the need for further research and evaluation. Additionally, the initial installation cost and financial burden on patients remain significant concerns. Similar to many industries, the development of rTHA, integrating computer and robotic technologies in the field of THA, appears promising but is still in its early stages. Surgeons need to critically evaluate this innovative technology and conduct further research for the benefit of patients.
References
Charnley J. The long-term results of low-friction arthroplasty of the hip performed as a primary intervention. J Bone Joint Surg. 1972;54(1):61–76.
Knight SR, Aujla R, Biswas SP, Total Hip Arthroplasty-over 100 years of operative history. Orthopedic reviews, 2011. 3(2).
Bozic KJ, et al. The epidemiology of revision total hip arthroplasty in the United States. J Bone Joint Surg Am. 2009;91(1):128–33.
King J, et al. Minimally invasive total knee arthroplasty compared with traditional total knee arthroplasty. Assessment of the learning curve and the postoperative recuperative period. J Bone Joint Surg Am. 2007;89(7):1497–503.
Jacofsky DJ, Allen M. Robotics in arthroplasty: a comprehensive review. J Arthroplasty. 2016;31(10):2353–63.
Subramanian P, et al. A review of the evolution of robotic-assisted total hip arthroplasty. Hip Int. 2019;29(3):232–8.
Paul HA, et al. Development of a surgical robot for cementless total hip arthroplasty. Clin Orthopaedics and Related Res. 1992;285:57–66.
Taylor K. Robodoc: study tests robot’s use in hip surgery. Hospitals. 1993;67(9):46.
Pransky J. ROBODOC-surgical robot success story. Ind Robot: An Int J. 1997;24(3):231–3.
Schulz AP, et al. Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures. Int J Med Robot Comput Assisted Surg. 2007;3(4):301–6.
Bargar WL, et al. Fourteen year follow-up of randomized clinical trials of active robotic-assisted total hip arthroplasty. J Arthroplasty. 2018;33(3):810–4.
Spencer EH. The ROBODOC clinical trial: a robotic assistant for total hip arthroplasty. Orthop Nurs. 1996;15(1):9–14.
Bargar WL, Bauer A, Börner M. Primary and revision total hip replacement using the Robodoc (R) system. Clin Orthopaedics and Related Res. 1998;354:82–91.
Honl M, et al. Comparison of robotic-assisted and manual implantation of a primary total hip replacement: a prospective study. JBJS. 2003;85(8):1470–8.
Wasterlain AS, et al. Navigation and robotics in total hip arthroplasty. JBJS Rev. 2017;5(3): e2.
Wu L-D, Hahne H, Hassenpflug J. The dimensional accuracy of preparation of femoral cavity in cementless total hip arthroplasty. J Zhejiang Univ-SCIENCE A. 2004;5:1270–8.
Mazoochian F, et al. Low accuracy of stem implantation in THR using the CASPAR-system anteversion measurements in 10 hips. Acta Orthop Scand. 2004;75(3):261–4.
Siebel T, Käfer W. Clinical outcome after robot-assisted versus conventionally implanted hip arthroplasty: prospective, controlled study of 71 patients. Z Orthop Ihre Grenzgeb. 2005;143:391–8.
Barrett A, et al. Computer-assisted hip resurfacing surgery using the Acrobot® navigation system. Proc Inst Mech Eng [H]. 2007;221(7):773–85.
Tarwala R, Dorr LD. Robotic assisted total hip arthroplasty using the MAKO platform. Curr Rev Musculoskelet Med. 2011;4:151–6.
Chen X, et al. Robotic-assisted compared with conventional total hip arthroplasty: systematic review and meta-analysis. Postgrad Med J. 2018;94(1112):335–41.
Li C, et al. Clinical application of robotic orthopedic surgery: a bibliometric study. BMC Musculoskelet Disord. 2021;22:1–14.
Simon DA, Lavallée S. Medical imaging and registration in computer assisted surgery. Clin Orthopaedics and Related Res (1976–2007). 1998;354:17–27.
Yao J, et al. A C-arm fluoroscopy-guided progressive cut refinement strategy using a surgical robot. Comput Aided Surg. 2000;5(6):373–90.
Chang J-D, et al. The evolution of computer-assisted total hip arthroplasty and relevant applications. Hip & pelvis. 2017;29(1):1–14.
Sugano N. Computer-assisted orthopaedic surgery and robotic surgery in total hip arthroplasty. Clin Orthop Surg. 2013;5(1):1–9.
Nishihara S, et al. Clinical accuracy evaluation of femoral canal preparation using the ROBODOC system. J Orthop Sci. 2004;9:452–61.
Nogler M, et al. Knee pain caused by a fiducial marker in the medial femoral condyle: a clinical and anatomic study of 20 cases. Acta Orthop Scand. 2001;72(5):477–80.
Nakamura N, et al. Robot-assisted primary cementless total hip arthroplasty using surface registration techniques: a short-term clinical report. Int J Comput Assist Radiol Surg. 2009;4:157–62.
Qin J et al. New technique: practical procedure of robotic arm-assisted (MAKO) total hip arthroplasty. Ann Trans Med, 2018. 6(18).
Bullock EK, et al. Robotics in total hip arthroplasty: current concepts. J Clin Med. 2022;11(22):6674.
Perazzini P, et al. The Mako™ robotic arm-assisted total hip arthroplasty using direct anterior approach: surgical technique, skills and pitfalls. Acta Bio Medica: Atenei Parmensis. 2020;91:21.
Gallo J, Havranek V, Zapletalova J. Risk factors for accelerated polyethylene wear and osteolysis in ABG I total hip arthroplasty. Int Orthop. 2010;34:19–26.
Leslie IJ, et al. High cup angle and microseparation increase the wear of hip surface replacements. Clin Orthopaedics and Related Res®. 2009;467(9):2259–65.
Kennedy J, et al. Effect of acetabular component orientation on recurrent dislocation, pelvic osteolysis, polyethylene wear, and component migration. J Arthroplasty. 1998;13(5):530–4.
Yamaguchi M, et al. The spatial location of impingement in total hip arthroplasty. J Arthroplasty. 2000;15(3):305–13.
Lewinnek GE, et al. Dislocations after total hip-replacement arthroplasties. JBJS. 1978;60(2):217–20.
Callanan MC, et al. The John Charnley Award: risk factors for cup malpositioning: quality improvement through a joint registry at a tertiary hospital. Clin Orthopaedics and Related Res®. 2011;469:319–29.
Jolles B, Zangger P. Factors predisposing to dislocation after primary total hip arthroplasty: a multivariate analysis. J Arthroplasty. 2002;17(3):282–8.
Widmer KH, Zurfluh B. Compliant positioning of total hip components for optimal range of motion. J Orthop Res. 2004;22(4):815–21.
Maruyama M, et al. Morphologic features of the acetabulum and femur: anteversion angle and implant positioning. Clin Orthopaedics and Related Res®. 2001;393:52–65.
McKibbin B. Anatomical factors in the stability of the hip joint in the newborn. J Bone Joint Surg. 1970;52(1):148–59.
Dorr LD, et al. Combined anteversion technique for total hip arthroplasty. Clin Orthop Relat Res. 2009;467:119–27.
Nakashima Y, et al. Combined anteversion technique reduced the dislocation in cementless total hip arthroplasty. Int Orthop. 2014;38:27–32.
Kayani B, et al. The current role of robotics in total hip arthroplasty. EFORT Open Rev. 2019;4(11):618.
Haffer H, et al. The impact of spinopelvic mobility on arthroplasty: implications for hip and spine surgeons. J Clin Med. 2020;9(8):2569.
Stefl M, et al. Spinopelvic mobility and acetabular component position for total hip arthroplasty. The Bone & Joint J. 2017;99:37–45.
Sicat CS, et al. Intraoperative technology use improves accuracy of functional safe zone targeting in total hip arthroplasty. J Arthroplasty. 2022;37(7):S540–5.
Kouyoumdjian P et al., Current concepts in robotic total hip arthroplasty. SICOT-J, 2020. 6.
Jerabek S et al. Accuracy of cup positioning and achieving desired hip length and offset following robotic THA. in 14th annual CAOS Meeting. 2014.
Nawabi DH, et al. Haptically guided robotic technology in total hip arthroplasty: a cadaveric investigation. Proc Inst Mech Eng [H]. 2013;227(3):302–9.
Dounchis J et al. A MULTI-CENTRE EVALUATION OF ACETABULAR CUP POSITINING IN ROBOTIC-ASSISTED TOTAL HIP ARTHROPLASTY. in Orthopaedic Proceedings. 2013. The British Editorial Society of Bone & Joint Surgery.
Elson L, et al. Precision of acetabular cup placement in robotic integrated total hip arthroplasty. Hip Int. 2015;25(6):531–6.
Domb BG, et al. Comparison of robotic-assisted and conventional acetabular cup placement in THA: a matched-pair controlled study. Clin Orthopaedics and Related Res®. 2014;472:329–36.
Domb BG, et al. Accuracy of component positioning in 1980 total hip arthroplasties: a comparative analysis by surgical technique and mode of guidance. J Arthroplasty. 2015;30(12):2208–18.
Tsai TY, et al. Does haptic robot-assisted total hip arthroplasty better restore native acetabular and femoral anatomy? Int J Med Robot Comput Assisted Surg. 2016;12(2):288–95.
Kamara E, et al. Adoption of robotic vs fluoroscopic guidance in total hip arthroplasty: is acetabular positioning improved in the learning curve? J Arthroplasty. 2017;32(1):125–30.
Nd IR, et al. Robotic-assisted total hip arthroplasty: outcomes at minimum two-year follow-up. Surg Technol Int. 2017;30:365–72.
Stewart NJ, Stewart JL, Brisbin A. A comparison of component positioning between fluoroscopy-assisted and robotic-assisted total hip arthroplasty. J Arthroplasty. 2022;37(8):1602–5.
Foissey C, et al. Image-based robotic-assisted total hip arthroplasty through direct anterior approach allows a better orientation of the acetabular cup and a better restitution of the centre of rotation than a conventional procedure. Int Orthop. 2023;47(3):691–9.
El Bitar YF, et al. Predictive value of robotic-assisted total hip arthroplasty. Orthopedics. 2015;38(1):e31–7.
Nodzo S, et al. Intraoperative placement of total hip arthroplasty components with robotic-arm assisted technology correlates with postoperative implant position: a CT-based study. Bone Joint J. 2018;100(10):1303–9.
Emara AK, et al. Robotic-arm assisted versus manual total hip arthroplasty: systematic review and meta-analysis of radiographic accuracy. Int J Med Robot Comput Assisted Surg. 2021;17(6): e2332.
Kumar V, et al. Does robotic-assisted surgery improve outcomes of total hip arthroplasty compared to manual technique? A systematic review and meta-analysis. Postgrad Med J. 2023;99(1171):375–83.
Fontalis A, et al. Functional implant positioning in total hip arthroplasty and the role of robotic-arm assistance. Int Orthop. 2023;47(2):573–84.
Avram GM et al., Acetabular cup placement and offset control in robotic total hip arthroplasty performed through the modified anterolateral approach. Int Orthopaedics, 2023: p. 1–9.
Nishihara S, et al. Comparison between hand rasping and robotic milling for stem implantation in cementless total hip arthroplasty. J Arthroplasty. 2006;21(7):957–66.
Lim S-J, et al. Robot-assisted primary cementless total hip arthroplasty with a short femoral stem: a prospective randomized short-term outcome study. Comput Aided Surg. 2015;20(1):41–6.
Schneider J, Kalender W. Geometric accuracy in robot-assisted total hip replacement surgery. Comput Aided Surg. 2003;8(3):135–45.
Decking J, et al. The primary stability between manual and robot assisted implantation of hip prostheses: a biomechanical study on synthetic femurs. Z Orthop Ihre Grenzgeb. 2004;142(3):309–13.
Love B. Leg length discrepancy after total hip replacement. J Bone Joint Surg, B. 1983;65:103.
Desai AS, Dramis A, Board TN. Leg length discrepancy after total hip arthroplasty: a review of literature. Curr Rev Musculoskelet Med. 2013;6:336–41.
Hofmann AA, Skrzynski MC, Hip arthroplasty: headaches & migraines: leg-length inequality and nerve palsy in total hip arthroplasty: a lawyer awaits! 2000, SLACK Incorporated Thorofare, NJ. p. 943–944.
Nakamura N, et al. A comparison between robotic-assisted and manual implantation of cementless total hip arthroplasty. Clin Orthopaedics and Related Res. 2010;468:1072–81.
Clement ND, et al. Robotic arm-assisted versus manual total hip arthroplasty: a propensity score matched cohort study. Bone & Joint Res. 2021;10(1):22–30.
von Lewinski G, Floerkemeier T. 10-year experience with short stem total hip arthroplasty. Orthopedics. 2015;38(3):S51–6.
Kim Y-H, et al. Long-term results and bone remodeling after THA with a short, metaphyseal-fitting anatomic cementless stem. Clin Orthopaedics and Related Res®. 2014;472:943–50.
Hananouchi T, et al. Effect of robotic milling on periprosthetic bone remodeling. J Orthop Res. 2007;25(8):1062–9.
Suarez-Ahedo C, et al. Robotic-arm assisted total hip arthroplasty results in smaller acetabular cup size in relation to the femoral head size: a matched-pair controlled study. Hip Int. 2017;27(2):147–52.
Perets I, et al. Robot-assisted total hip arthroplasty: clinical outcomes and complication rate. Int J Med Robot Comput Assisted Surg. 2018;14(4): e1912.
Banchetti R, et al. Comparison of conventional versus robotic-assisted total hip arthroplasty using the Mako system: an Italian retrospective study. J Health Soc Sci. 2018;3(1):37–48.
Domb BG, et al. Minimum 5-year outcomes of ROBOTIC-ASSISTED primary total hip arthroplasty with a nested comparison against manual primary total hip arthroplasty: a propensity score–matched study. JAAOS-J Am Acad Orthopaedic Surg. 2020;28(20):847–56.
Coulomb R, et al. Does acetabular robotic-assisted total hip arthroplasty with femoral navigation improve clinical outcomes at 1-year post-operative? A case-matched propensity score study comparing 98 robotic-assisted versus 98 manual implantation hip arthroplasties. Orthop Traumatol Surg Res. 2023;109(1): 103477.
Han Pf, et al. Robotics-assisted versus conventional manual approaches for total hip arthroplasty: a systematic review and meta-analysis of comparative studies. Int J Med Robot Comput Assisted Surg. 2019;15(3):e1990.
Samuel LT, et al. Comparing early and mid-term outcomes between robotic-arm assisted and manual total hip arthroplasty: a systematic review. J Robot Surg. 2022;16(4):735–48.
Chen X, et al. Robotic arm-assisted arthroplasty: the latest developments. Chin J Traumatol. 2022;25(03):125–31.
Bukowski BR, et al. Improved functional outcomes with robotic compared with manual total hip arthroplasty. Surg Technol Int. 2016;29:303–8.
Siebel T, Käfer W. Clinical outcome following robotic assisted versus conventional total hip arthroplasty: a controlled and prospective study of seventy-one patients. Z Orthop Ihre Grenzgeb. 2005;143(4):391–8.
Redmond JM, et al. The learning curve associated with robotic-assisted total hip arthroplasty. J Arthroplasty. 2015;30(1):50–4.
Heng Y, et al. Conventional vs robotic arm assisted total hip arthroplasty (THA) surgical time, transfusion rates, length of stay, complications and learning curve. J Arthritis. 2018;7(07):04.
Kong X, et al. A retrospective study comparing a single surgeon’s experience on manual versus robot-assisted total hip arthroplasty after the learning curve of the latter procedure–A cohort study. Int J Surg. 2020;77:174–80.
Kayani B, et al. The learning curve of robotic-arm assisted acetabular cup positioning during total hip arthroplasty. Hip Int. 2021;31(3):311–9.
Tian R, et al. Precise acetabular positioning, discrepancy in leg length, and hip offset using a new seven-axis robot-assisted total hip arthroplasty system requires no learning curve: a retrospective study. J Orthop Surg Res. 2023;18(1):1–10.
Marcovigi A, et al. Dislocation risk after robotic arm-assisted total hip arthroplasty: a comparison of anterior, lateral and posterolateral approaches. Hip Int. 2023;33(3):426–33.
Nogler M, et al. Excessive heat generation during cutting of cement in the Robodoc hip-revision procedure. Acta Orthop Scand. 2001;72(6):595–9.
Bargar WL. Robots in orthopaedic surgery: past, present, and future. Clin Orthopaedics and Related Res®. 2007;463:31–6.
Kirchner GJ, et al. The cost of robot-assisted total hip arthroplasty: comparing safety and hospital charges to conventional total hip arthroplasty. JAAOS-J Am Acad Orthopaedic Surg. 2021;29(14):609–15.
Booij R, et al. Technological developments of X-ray computed tomography over half a century: User’s influence on protocol optimization. Eur J Radiol. 2020;131: 109261.
Gupta A, et al. Does robotic-assisted computer navigation affect acetabular cup positioning in total hip arthroplasty in the obese patient? A comparison study. J Arthroplasty. 2015;30(12):2204–7.
Ando W, et al. Comparison of the accuracy of the cup position and orientation in total hip arthroplasty for osteoarthritis secondary to developmental dysplasia of the hip between the Mako robotic arm-assisted system and computed tomography-based navigation. Int Orthop. 2021;45:1719–25.
Sato K, et al. A propensity score-matched comparison between Mako robotic arm-assisted system and conventional technique in total hip arthroplasty for patients with osteoarthritis secondary to developmental dysplasia of the hip. Arch Orthop Trauma Surg. 2023;143(5):2755–61.
Kolodychuk N, et al. Can robotic technology mitigate the learning curve of total hip arthroplasty? Bone & Joint Open. 2021;2(6):365–70.
Maldonado DR, et al. Robotic arm-assisted total hip arthroplasty is more cost-effective than manual total hip arthroplasty: a Markov model analysis. JAAOS-J Am Acad Orthopaedic Surg. 2021;29(4):e168–77.
Pierce J, et al. Robotic-assisted total hip arthroplasty: an economic analysis. J Comparative Effectiveness Res. 2021;10(16):1225–34.
Barsoum W, et al. Advantages of robotic arm-assisted total hip arthroplasty: a 90-day episode-of-care clinical utility and cost analysis. J Comparative Effectiveness Res. 2023;12(5): e220208.
Funding
There is no funding for this study.
Author information
Authors and Affiliations
Contributions
Seungcheol Kwon wrote the main manuscript, Jihyo Hwang supervised whole process as a principle investigator, Kwangkyoun Kim overviewed and corrected the manuscript, Junhyuk Kwon conducted data collection.
Corresponding author
Ethics declarations
Conflict of interest
The Kwangkyoun Kim, Seungcheol Kwon, Junhyuk Kwon, Jihyo Hwang, all authors declare no competing financial interests.
Ethics approval and consent to participate
This study did not require approval from an ethics committee or institutional review board due to the utilization of publicly available data.
Consent for publication
All authors consented for publication.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kim, K., Kwon, S., Kwon, J. et al. A review of robotic-assisted total hip arthroplasty. Biomed. Eng. Lett. 13, 523–535 (2023). https://doi.org/10.1007/s13534-023-00312-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13534-023-00312-9