
Abstract
We study rotational surfaces with constant Minkowski Gaussian curvature and rotational surfaces with constant Minkowski mean curvature in a 3-dimensional normed space with rotationally symmetric norm. We have a generalization of the catenoid, pseudo-sphere and Delaunay surfaces.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is interesting to generalize differential geometry of curves and surfaces in Euclidean spaces to that in normed spaces, or generally, in gauge spaces (cf. Balestro et al. 2019a, b, 2020a, b, c, d, 2021; Busemann 1950; Guggenheimer 1965), where how to compensate for the lack of the notion of angle is the problem, and the notion of Birkhoff orthogonality plays an important role. For surfaces in 3-dimensional normed spaces, the notions of Birkhoff-Gauss map, Minkowski Gaussian curvature and Minkowski mean curvature are particularly important (cf. Balestro et al. 2019b, 2020c, d, 2021).
In this paper, we study rotational surfaces in a 3-dimensional normed space with rotationally symmetric norm, in particular, rotational surfaces with constant Minkowski Gaussian curvature and rotational surfaces with constant Minkowski mean curvature.
This paper is organized as follows. In Sect. 2, following Balestro et al. (2020c), we recall some basic facts on surfaces in 3-dimensional normed spaces. In Sect. 3, we give a basic computation for rotational surfaces in a 3-dimensional normed space with rotationally symmetric norm. In Sect. 4, we consider rotational minimal surfaces in the 3-dimensional normed space. In Sect. 5, we discuss rotational surfaces with non-zero constant Minkowski Gaussian curvature in the 3-dimensional normed space. In Sect. 6, we study rotational surfaces with non-zero constant Minkowski mean curvature in the 3-dimensional normed space, which can be seen as a generalization of the Delaunay surfaces (Delaunay 1841).
The author wishes to thank the referee for useful suggestion.
2 Preliminaries
In this section, following Balestro et al. (2020c), we recall some basic facts on surfaces in 3-dimensional normed spaces.
Let \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) be a 3-dimensional normed space whose unit ball B and unit sphere S are defined by
In the following, we assume that S is smooth and strictly convex, that is, S is a smooth surface and S contains no line segment.
Remark. We do not assume that S has positive Euclidean Gaussian curvature as in Balestro et al. (2020c), because we treat the case where S has points with zero Euclidean Gaussian curvature.
Let v be a non-zero vector in \({{\mathbb {R}}}^3\) and \(\Pi \) be a plane in \({{\mathbb {R}}}^3\). We say that v is Birkhoff orthogonal to \(\Pi \) (denoted by \(v \dashv _{B} \Pi \)) if the tangent plane of S at \(v/\Vert v\Vert \) is \(\Pi \).
Let M be a surface immersed in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\). Let \(T_{p}M\) be the tangent plane of M at \(p \in M\). There exists a vector \(\eta (p) \in S\) such that \(\eta (p) \dashv _{B} T_{p}M\), which gives a local smooth map \(\eta : U \subset M \rightarrow S\) called the Birkhoff-Gauss map. It can be global if and only if M is orientable. We define the Minkowski Gaussian curvature K and the Minkowski mean curvature H of M at p by
We say that M is flat if \(K = 0\) identically, and minimal if \(H = 0\) identically.
A surface which is homothetic to the unit sphere S is called a Minkowski sphere. A Minkowski sphere has positive constant Minkowski Gaussian curvature and non-zero constant Minkowski mean curvature.
3 Rotational surfaces
Let
where m is a positive integer. It is given by rotating \(x_1^{2m}+x_3^{2m} = 1\) around \(x_3\)-axis. Then there exists a norm \(\Vert \cdot \Vert \) on \({{\mathbb {R}}}^3\) whose unit sphere is the above S. Set
Throughout this paper, we consider this 3-dimensional normed space \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\). The case where \(m = 1\) is the Euclidean case. We assume that \(m \ge 2\) in the following.
Let M be a surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) which is rotational around \(x_3\)-axis, and is parametrized by
where \(\alpha > 0\), \(\alpha ' \ne 0\) and \(\beta ' \ne 0\). Then
The Birkhoff-Gauss map \(\eta = \eta (u, v)\) is characterized by the condition
where \(\mu \) is a positive function and \(\times \) denotes the standard cross product in \({{\mathbb {R}}}^3\). Then we can get
where
We can compute that
and
Thus we have
and
Letting \(\beta (u) = u\), we have
and
By (3.7), we see that \(K = 0\) if and only if \(\alpha '' = 0\). So we have the following.
Proposition 3.1
A rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
where \(\alpha > 0\), \(\alpha ' \ne 0\) is flat if and only if it is a circular cone.
4 Rotational minimal surfaces
Let \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) be the 3-dimensional normed space as in Sect. 3. Let M be a rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
where \(\alpha > 0\) and \(\alpha ' \ne 0\).
By (3.8), the rotational surface M is minimal if and only if
From the Eq. (4.1), we have
Multiplying by \(2\alpha '\) we have
and
Letting
for the right-hand side, we have
for a constant \(c_1\). Then
for a positive constant \(c_2\), and
for a constant \(c_3\), where \(\alpha > c_2\). Here we note that since
the above integral converges and
Then we have the following.
Theorem 4.1
A rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) given by
where \(\alpha > 0\) is minimal if and only if
for constants \(c_2 > 0\) and \(c_3\), where \(\alpha > c_2\).
Now, let us set
for constants \(c_2 > 0\) and \(c_3\), where \(\alpha > c_2\), and we consider the behavior of the graph of \(u_{\pm }(\alpha )\). Since \(m \ge 2\),
for some positive value \(d_1\). So we have
The function \(u_{+}(\alpha )\) is an increasing function and
Similarly, \(u_{-}(\alpha )\) is a decreasing function and
Let \(\alpha _{+}(u)\) be the inverse function of \(u_{+}(\alpha )\). It is an increasing function on \((c_3, c_3+d_1)\) and
Let \(\alpha _{-}(u)\) be the inverse function of \(u_{-}(\alpha )\). It is a decreasing function on \((c_3-d_1, c_3)\) and
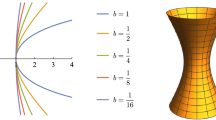
We define a function \({\hat{\alpha }}(u)\) on \((c_3-d_1, c_3+d_1)\) by
Then \({\hat{\alpha }}(u)\) is a \(C^1\)-function on \((c_3-d_1, c_3+d_1)\) such that
For \(u \in (c_3-d_1, c_3) \cup (c_3, c_3+d_1)\), \({\hat{\alpha }}(u)\) satisfies the Eq. (4.1). Then, noting that \(m \ge 2\), we can see that
and
Thus the function \({\hat{\alpha }}(u)\) is a \(C^2\)-function on \((c_3-d_1, c_3+d_1)\). Also by (3.5) and (3.6), we find that the Birkhoff-Gauss map can be \(C^1\)-extended for \(u \in (c_3-d_1, c_3+d_1)\).
Therefore, we have the following.
Theorem 4.2
Under the notation above, the rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
is minimal.
Remark. The above surface can be seen as a generalization of the catenoid in the Euclidean 3-space. But we should note that the range of u is bounded.
5 Non-zero constant Gaussian curvature
Let \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) be the 3-dimensional normed space as in Sect. 3. Let M be a rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
where \(\alpha > 0\) and \(\alpha ' \ne 0\).
By (3.7), if K is a non-zero constant, then
Multiplying by \(2\alpha '\) we have
Integrating it we have
for a constant \(c_1\). Then
and we get the following.
Theorem 5.1
A rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) given by
where \(\alpha > 0\) has non-zero constant Minkowski Gaussian curvature K if and only if
for a constant \(c_1\).
Now, let us set
for a constant \(c_1\), and we discuss the behavior of the graph of \(u_{\pm }(\alpha )\). It suffices to consider the case where \(K = 1\) or \(K = -1\).
(i) The case \(K = 1\). We have \(c_1 < 1\) and
(i-1) The case \(c_1 = 0\). In this case we have
for a constant \(c_2\). It satisfies
So the resulting surface can be smoothly extended to a Minkowski sphere, which is a parallel translation of the unit sphere S.
(i-2) The case \(0< c_1 < 1\). In this case, we have \(0< \alpha < \sqrt{1-c_1}\) and we can write
for a constant \(c_3\). Since
the above integral converges. Set
Then
The function \(u_{+}(\alpha )\) is an increasing function and
The function \(u_{-}(\alpha )\) is a decreasing function and
Let \(\alpha _{+}(u)\) be the inverse function of \(u_{+}(\alpha )\). It is an increasing function on \((c_3-d_1, c_3)\) and
Let \(\alpha _{-}(u)\) be the inverse function of \(u_{-}(\alpha )\). It is a decreasing function on \((c_3, c_3+d_1)\) and
We define a function \({\hat{\alpha }}(u)\) on \((c_3-d_1, c_3+d_1)\) by
Then \({\hat{\alpha }}(u)\) is a \(C^1\)-function on \((c_3-d_1, c_3+d_1)\) such that
For \(u \in (c_3-d_1, c_3) \cup (c_3, c_3+d_1)\), \({\hat{\alpha }}(u)\) satisfies the Eq. (5.1) for \(K = 1\). Then, noting that \(m \ge 2\), we can see that
and
Thus the function \({\hat{\alpha }}(u)\) is a \(C^2\)-function on \((c_3-d_1, c_3+d_1)\). Also by (3.5) and (3.6), we find that the Birkhoff-Gauss map can be \(C^1\)-extended for \(u \in (c_3-d_1, c_3+d_1)\).
On the other hand, we have
and
So the surface has singularities at \((0,0,c_3-d_1)\) and \((0,0,c_3+d_1)\).
(i-3) The case \(c_1 < 0\). In this case, we have \(\sqrt{-c_1}< \alpha < \sqrt{1-c_1}\) and
for a constant \(c_4\). As in the case (i-2), we can see that the graphs of \(u_{+}(\alpha )\) and \(u_{-}(\alpha )\) are connected smoothly at \(\alpha = \sqrt{1-c_1}\). But the surface has singularities at points where \(\alpha = \sqrt{-c_1}\).
(ii) The case \(K = -1\). We have \(c_1 > 0\) and
(ii-1) The case \(0 < c_1 \le 1\). In this case, we have \(0< \alpha < \sqrt{c_1}\) and
for a constant \(c_5\). Then
(ii-1-1) When \(c_1 = 1\), since
we have
The corresponding surface has singularities at points where \(\alpha = 1\), and it can be seen as a generalization of the pseudo-sphere in the Euclidean 3-space.
(ii-1-2) When \(0< c_1 < 1\), we have
where
and
So the surface has singularities at points where \(\alpha = \sqrt{c_1}\) and \(\alpha = 0\).
(ii-2) The case \(c_1 > 1\). In this case, we have \(\sqrt{c_1-1}< \alpha < \sqrt{c_1}\) and
for a constant \(c_6\). By the discussion as before, the graphs of \(u_{+}\) and \(u_{-}\) can be \(C^2\)-connected at \(\alpha = \sqrt{c_1-1}\). But the surface has singularities at points where \(\alpha = \sqrt{c_1}\).
6 Non-zero constant mean curvature
Let \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) be the 3-dimensional normed space as in Sect. 3. Let M be a rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
where \(\alpha > 0\) and \(\alpha ' \ne 0\).
By (3.8), if H is a non-zero constant, then
Multiplying by \(-\alpha '\) we have
Integrating it we can get
for a constant \(c_1\). Then
and we get the following.
Theorem 6.1
A rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) given by
where \(\alpha > 0\) has non-zero constant Minkowski mean curvature H if and only if
for a constant \(c_1\).
Set
To study the behavior of the graph of \(u_{\pm }(\alpha )\), it suffices to consider the case where \(H = \pm 1\). The signature of H changes if the orientation of the parametrization changes. So we treat the both cases \(H = 1\) and \(H = -1\).
(i) The case \(H = 1\). In this case, we have \(c_1 > 0\),
and
for a constant \(c_{2}^{\pm }\). This integral converges as \(\alpha \) tends to \(\sqrt{c_1}\), and since \(0< (2m-1)/2m < 1\), it converges also as \(\alpha \) tends to \(b_1\). Set
Then
The function \(u_{+}(\alpha )\) is an increasing function and
The function \(u_{-}(\alpha )\) is a decreasing function and
(ii) The case \(H = -1\). We have
for a constant \(c_3\). Here we use \(c_3\) instead of \(c_1\) because we will later choose \(c_3\) different from \(c_1\).
(ii-1) The case \(c_3 = 0\). Then
for a constant \(c_4\). It satisfies
So the surface can be smoothly extended to a Minkowski sphere, which is a parallel translation of the unit sphere S.
(ii-2) The case \(c_3 > 0\). In this case, we have \(0< c_3 < 1/4\),
and
for a constant \(c_5\). This integral converges as \(\alpha \) tends to \(b_2\) and \(b_3\). Set
Then
The function \(u_{+}(\alpha )\) is an increasing function and
The function \(u_{-}(\alpha )\) is a decreasing function and
Let \(\alpha _{+}(u)\) be the inverse function of \(u_{+}(\alpha )\). It is increasing on \((c_5, c_5+d_2)\) and
Let \(\alpha _{-}(u)\) be the inverse function of \(u_{-}(\alpha )\). It is decreasing on \((c_5-d_2, c_5)\) and
We define a function \({\hat{\alpha }}(u)\) on \([c_5-d_2, c_5+d_2]\) by
Then it is a \(C^1\)-function on \([c_5-d_2, c_5+d_2]\) such that
For \(u \in (c_5-d_2, c_5) \cup (c_5, c_5+d_2)\), \({\hat{\alpha }}(u)\) satisfies the Eq. (6.1) for \(H = -1\). Then, noting that \(m \ge 2\), we can see that
and
So the function \({\hat{\alpha }}(u)\) is a \(C^2\)-function on \([c_5-d_2, c_5+d_2]\). By (3.5) and (3.6), the Birkhoff-Gauss map can be \(C^1\)-extended for \(u \in [c_5-d_2, c_5+d_2]\).
We note that \({\hat{\alpha }}(u)\) has the same derivatives at the end points \(u = c_5-d_2\) and \(u = c_5+d_2\). Thus we can extend \({\hat{\alpha }}(u)\) periodically as a \(C^2\)-function on \({{\mathbb {R}}}\) as follows:
and we get the following.
Theorem 6.2
Under the notation above, the rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
has constant Minkowski mean curvature \(-1\).
Remark. The surface in Theorem 6.2 can be seen as a generalization of the unduloid (Delaunay 1841).
(ii-3) The case \(c_3 < 0\). In this case we have
and
for a constant \(c_6\). This integral converges as \(\alpha \) tends to \(\sqrt{-c_3}\) and \(b_4\). Set
Then
The function \(u_{+}(\alpha )\) is an increasing function and
The function \(u_{-}(\alpha )\) is a decreasing function and
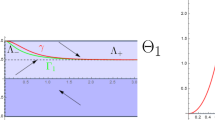
In the following, we will connect the curves in the cases (i) and (ii-3). For distinguishment, we denote \(u_{\pm }(\alpha )\) in the case (i) by \(u_{1\pm }(\alpha )\), and \(u_{\pm }(\alpha )\) in the case (ii-3) by \(u_{2\pm }(\alpha )\).
We take the graph \(G_1\) of \(u_{1+}(\alpha )\) for \(b_1< \alpha < \sqrt{c_1}\). Next, choosing \(c_3 := -c_1\) and \(c_6 := c_{2}^{+}-d_3\), we take the graph \(G_2\) of \(u_{2-}(\alpha )\) for
Then \(G_1\) and \(G_2\) are \(C^1\)-connected at \((\alpha , u) = (\sqrt{c_1}, c_{2}^{+})\).
Next we take the graph \(G_3\) of \(u_{2+}(\alpha )\) for \(\sqrt{c_1}< \alpha < b_4\). Then \(G_2\) and \(G_3\) are \(C^1\)-connected at \((\alpha , u) = (b_4, c_{2}^{+}-d_3)\).
Finally, letting \(c_{2}^{-} := c_{2}^{+}-2d_3\), we take the graph \(G_4\) of \(u_{1-}(\alpha )\) for \(b_1< \alpha < \sqrt{c_1}\). Then \(G_3\) and \(G_4\) are \(C^1\)-connected at \((\alpha , u) = (\sqrt{c_1}, c_{2}^{+}-2d_3)\). Thus we get a \(C^1\)-curve \(\Gamma \) which is constructed by connecting \(G_1\), \(G_2\), \(G_3\) and \(G_4\).
With respect to the parameter u, \(H = 1\) for the \(G_1\) and \(G_4\) parts, and \(H = -1\) for the \(G_2\) and \(G_3\) parts. On the other hand, with respect to the parameter \(\alpha \), \(H = 1\) for the \(G_1\) and \(G_2\) parts, and \(H = -1\) for the \(G_3\) and \(G_4\) parts. Then, with respect to a parametrization of \(\Gamma \) in the order of \(G_1\), \(G_2\), \(G_3\) and \(G_4\), we have \(H = 1\) for all parts.
The \(C^2\)-connectedness of \(G_2\) and \(G_3\) is shown by the discussion as before. Similarly we can see that \(G_1\) and \(G_4\) are \(C^2\) at \(\alpha = b_1\).
Let us prove the \(C^2\)-connectedness of \(G_1\) and \(G_2\). We define a function \({\hat{u}}(\alpha )\) on \((b_1, b_4)\) by
Then it is a \(C^1\)-function on \((b_1, b_4)\) such that
For \(\alpha \in (b_1, \sqrt{c_1}) \cup (\sqrt{c_1}, b_4)\), \({\hat{u}}(\alpha )\) satisfies the Eq. (3.4) for "\(H = 1\)", where \(\alpha \) is the parameter and \(\beta = {\hat{u}}(\alpha )\). Then, noting that \(m \ge 2\), we can see that
and
So the function \({\hat{u}}(\alpha )\) is a \(C^2\)-function on \((b_1, b_4)\). By (3.1) and (3.2), the Birkhoff-Gauss map can be \(C^1\)-extended for \(\alpha \in (b_1, b_4)\). Thus the \(C^2\)-connectedness of \(G_1\) and \(G_2\) is proved. The \(C^2\)-connectedness of \(G_3\) and \(G_4\) is proved similarly.
Now we have obtained a \(C^2\)-curve \(\Gamma \) which is constructed by connecting \(G_1\), \(G_2\), \(G_3\) and \(G_4\). The curve \(\Gamma \) has the same derivatives at the end points. Then, as in the case (ii-2), we can extend it periodically as a \(C^2\)-curve \(\Gamma ^{*}\), which can be parametrized as \((\alpha ^{*}(t), \beta ^{*}(t))\) for \(t \in {{\mathbb {R}}}\).
Theorem 6.3
Under the notation above, the rotational surface in \(({{\mathbb {R}}}^3, \Vert \cdot \Vert )\) parametrized by
has constant Minkowski mean curvature 1.
Remark. (i) The surface in Theorem 6.3 can be seen as a generalization of the nodoid (Delaunay 1841).
(ii) By "Mathematica" we know that: (a) When \(c_1 = -c_3 = 2\) and \(m = 2\), \(d_1 = 0.34459...\) and \(d_3 = 0.65540...\), (b) When \(c_1 = -c_3 = 2\) and \(m = 3\), \(d_1 = 0.33886...\) and \(d_3 = 0.66113...\), and (c) When \(c_1 = -c_3 = 6\) and \(m = 2\), \(d_1 = 0.40710...\) and \(d_3 = 0.59289...\). Thus the curve \(\Gamma \) is not closed in those cases.
References
Balestro, V., Martini, H., Shonoda, E.: Concepts of curvatures in normed planes. Expo. Math. 37, 347–381 (2019a)
Balestro, V., Martini, H., Teixeira, R.: Surface immersions in normed spaces from the affine point of view. Geom. Dedicata 201, 21–31 (2019b)
Balestro, V., Martini, H., Sakaki, M.: Curvature types of planar curves for gauges. J. Geom. 111, no. 1, Paper No.12, 12 pp (2020a)
Balestro, V., Martini, H., Sakaki, M.: Differential geometry of spatial curves for gauges, S\(\tilde{\text{ a }}\)o Paulo. J. Math. Sci. 14(2), 496–509 (2020b)
Balestro, V., Martini, H., Teixeira, R.: Differential geometry of immersed surfaces in three-dimensional normed spaces. Abh. Math. Semin. Univ. Hambg. 90, 111–134 (2020c)
Balestro, V., Martini, H., Teixeira, R.: On curvature of surfaces immersed in normed spaces. Monatsh. Math. 192, 291–309 (2020d)
Balestro, V., Martini, H., Teixeira, R.: Some topics in differential geometry of normed spaces. Adv. Geom. 21, 109–118 (2021)
Busemann, H.: The foundations on Minkowskian geometry. Comment. Math. Helv. 24, 156–187 (1950)
Delaunay, C.: Sur la surface de revolution dont la courbure moyenne est constante. J. Math. Pures Appl. 6, 309–320 (1841)
Guggenheimer, H.: Pseudo-Minkowski differential geometry. Ann. Mat. Pure Appl. 70, 305–370 (1965)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Sakaki, M. Rotational surfaces in a 3-dimensional normed space. Beitr Algebra Geom 65, 23–41 (2024). https://doi.org/10.1007/s13366-022-00674-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13366-022-00674-8
Keywords
- Rotational surface
- Normed space
- Birkhoff orthogonal
- Birkhoff-Gauss map
- Minkowski Gaussian curvature
- Minkowski mean curvature