
Abstract
In this paper, we consider a tumor growth model with the effect of tumor–immune interactions and chemotherapeutic as well as immunotherapeutic drugs. In our model there are four compartments, namely tumor cells, immune cells, chemotherapeutic drug concentration and immunotherapeutic drug concentration. The dynamical behaviour of our system by analyzing the existence and stability of our system at various equilibria is discussed elaborately. We set up an optimal control problem relative to the model so as to minimize the number of tumor cells and the chemotherapeutic and immunotherapeutic drugs administration. Here we use a quadratic control to quantify this goal and consider the administration of chemotherapy and immunotherapeutic drugs as controls to reduce the spread of the tumor growth. The important mathematical findings for the dynamical behaviour of the tumor–immune model are also numerically verified using MATLAB. Finally epidemiological implications of our analytical findings are addressed critically.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Cancer is a class of diseases characterized by out-of-control cell growth. Our body is made up of many types of cells. Normally these cells grow and divide in a controlled way to produce more cells as they are needed to keep the body healthy. When cells become old or damaged, they die and are replaced with new cells. However, sometimes this ordinary process goes wrong. The genetic material (DNA) of a cell can become damaged or changed, producing mutations that affect normal cell growth and division. When this happens, cells do not die when they should and the damaged cells divide uncontrollably to form lumps or masses of tissue called tumors. Tumors can grow and interfere with the digestive, nervous and circulatory systems and they can release hormones that alter body functions. Not all tumors are cancerous. Tumors can be benign or malignant. Benign tumors are not cancerous. They can often be removed and in most cases they do not come back. Cells in benign tumors do not spread to other parts of the body. Malignant tumors are cancerous. Cells in these tumors can invade nearly tissues and successfully spread to other parts of the body and grow, invading and destroying other healthy tissues. The spread of cancer from one part of the body to another is called metastasis. Some cancers do not form tumors. For example, Leukemia is a cancer of the bone marrow and blood. There are over 100 different types of cancer and each is classified by the type of cell that is initially affected.
Our immune system plays a major role in limiting the development of these cancerous cells. CD4 helper T cells, which normally assist other cells of the immune system during an infection and CD8 killer T cells, which directly attack and eliminate infected cells are two of the body’s most important immune cells for defending against cancerous cells. In the case of cancer, the immune system alone often fails to effectively fight the tumor for the following reasons: (i) The normal immune system is ‘blind’ to tumor cells because the tumor cells are derived from the body’s own cells. The immune system ‘thinks’ of the tumor as ‘self’ and can not recognize them as ‘foreign’, which creates a phenomenon known as ‘tumor tolerance’. (ii) The immune system may recognize certain cancer cells, but the response may not be strong enough by itself to destroy the cancer. (iii) The tumor has the ability to defend itself. The immune system thus may need a boost to potentially be able to become more effective in fighting the cancer.
Cancer can be treated by chemotherapy, immunotherapy, radiation therapy, surgery, monoclonal antibody therapy etc. The choice of therapy depends upon the location and grade of the tumor and the stage of the disease, as well as the medical state and age of the patients. Complete removal of the cancer without damaging the rest of the body is the goal of treatment. But unfortunately most of the cancer treatments have a negative effect on normal body cells.
Chemotherapy is the treatment of cancer with one or more cytotoxic antineoplastic drug (“chemotherapeutic agents”) as part of a standardized regimen. Most forms of chemotherapy drugs act by killing cells that divide rapidly, one of the main properties of most cancer cells. This means that chemotherapy also harms cells that divide rapidly under normal circumstances: cells in the bone marrow, digestive tract and hair follicles. This results in the most common side-effects of chemotherapy: myelosuppression (decreased production of blood cells), hence also immunosuppression, mucositis (inflammation of the lining of the digestive tract), alopecia (hair loss) etc. These are the harmful side-effects of chemotherapy.
Immunotherapy is one of the most recent approaches to cancer therapy. It is based on the generally-accepted hypothesis: ‘the immune system is the best tool that humans have for fighting disease’. Immunotherapy works on white blood cells, the body’s first line of defense against disease. White blood cells can be stimulated in various ways to boost the body’s immune response to cancer with little or no effect on healthy tissues. Immunotherapy can also be used to lessen the side effects of other cancer treatments. Immunotherapies have the potential to be used to fight cancer by either applying an external stimulates to the immune system to make it act more forcefully or by providing the immune system with man-made or naturally-derived tumor specific proteins made outside of the body so that the immune system can recognize the tumor as a foreign entity and destroy it. Immunotherapy is sometimes used by itself to treat cancer, but it is most often used in combination with traditional treatments like chemotherapy, radiation therapy, surgery etc. in order to enhance their effects. One of the possible benefits of immunotherapy is that it has the potential not to be as toxic as chemotherapy, radiation therapy and surgery.
Theoretical study of cancer through mathematical modelling is a very useful approach to shape our understanding of tumor–immune dynamics. The model developed by Kuznetsov [26], in which the nonlinear dynamics of immunogenic tumors are examined, exhibits oscillatory growth patterns in tumors. Kuznetsov and Knott [25] have developed a deterministic model that describes the interplay of the cancer cells and the cytotoxic killer cells. Though they have considered only one immune cell population, they have discussed effectively the mechanisms of tumor growth, suppression and regrowth. Kuznetsov and Taylor [27] presented a mathematical model of the cytotoxic T lymphocyte response to the growth of an immunogenic tumor. The mathematical model developed by Kirschner and Panetta [23] focuses on the tumor–immune interaction. It indicates that the dynamics among tumor cells, immune cells and the cytokine interleukin-2 can explain both short-term oscillations in tumor size as well as long-term tumor relapse. Kolev [24] presented a mathematical model showing competition between tumor cells and immune cells considering the role of antibodies. de Pillis et. al. [9] presented a mathematical model on tumor growth using mixed immunotherapy and chemotherapy. de Pillis and Radunskaya [10] presented a mathematical model, showing competition between normal cells and tumor cells considering the role of chemotherapeutic drugs. There are some other research works on tumor–immune dynamics [1, 3, 4, 7, 12, 13, 15, 31, 33, 36, 38, 40]. Also there are some research works on the tumor growth models with optimal control strategies [8, 10, 11, 16–19, 30, 35]. These are very helpful to predict the most effective therapy and strategy to control the spread of diseases minimizing the total drug administered.
In this paper, we consider a tumor growth model exhibiting the effect of tumor–immune interaction with chemotherapeutic as well as immunotherapeutic drugs. The model construction and assumptions are described in “Mathematical model” section. In “Behaviour of the solutions of system” section, we discuss the behaviour of the solutions of our model. The dynamical behaviour of our system by analyzing the existence and stability at various equilibria is discussed in “Equilibria: their existence and stabilities” section. In the next section, we set up an optimal control problem relative to the model so as to minimize the number of tumor cells and the chemotherapeutic and immunotherapeutic drugs administration. Here we use a quadratic control to quantify this goal and consider the administration of chemotherapeutic and immunotherapeutic drugs as controls to reduce the spread of the disease. The important mathematical findings for the dynamical behaviour of the tumor–immune model are also numerically verified using MATLAB in “Numerical simulations” section. Finally, “Discussions and conclusions” section contains general discussions and conclusions of the paper and epidemiological implications of our mathematical findings.
Mathematical Model
In this section we construct a mathematical model of tumor growth with an immune response, chemotherapy and immunotherapy.
The model can be presented by the following set of ordinary differential equations:
with initial conditions
where T(t), I(t) are the tumor cell biomass and immune cell biomass respectively and \(D_1(t), D_2(t)\) are amount (or concentration) of chemotherapeutic drug in the bloodstream and amount (or concentration) of immunotherapeutic drug in the bloodstream respectively at time t. All the model parameters \(r, p, \alpha _1, \alpha _2, s, \rho , h, \beta , \mu , g, \gamma _1, \gamma _2, q_1, q_2\) are all non-negative constants.
The model parameters are described below:
- r :
-
intrinsic growth rate of tumor cells in the absence of immune cells and chemotherapeutic drug.
- \(p > 0\) :
-
reciprocal carrying capacity for tumor cells in the absence of immune cells and chemotherapeutic drug.
- \(s > 0\) :
-
constant influx rate of immune cells.
- \(\alpha _1, \alpha _2\) :
-
rate of loss of tumor cells due to encounter with immune cells and rate of loss of immune cells due to encounter with the tumor cells respectively.
- \(\rho \) :
-
maximum immune cell recruitment rate by ligand-transduced tumor cells [9].
- \(h > 0\) :
-
steepness coefficient of the immune cell recruitment curve by tumor cells.
- \(\beta \) :
-
maximum immune cell recruitment rate by immunotherapeutic drug.
- \(g > 0\) :
-
steepness coefficient of the immune cell recruitment curve by immunotherapeutic drug [9].
- \(\mu > 0\) :
-
per capita decay rate of immune cells in the absence of tumor cells, influx and two types of drugs.
- \(\gamma _1 > 0\) :
-
decay rate of the chemotherapeutic drug.
- \(\gamma _2 > 0\) :
-
decay rate of the immunotherapeutic drug.
- u(t):
-
the dose of chemotherapeutic drug given.
- v(t):
-
the dose of immunotherapeutic drug given.
- \(q_1, q_2\) :
-
response coefficients to the chemotherapeutic drug for tumor cells and immune cells respectively.
This model involves certain assumptions which consist of the followings:
-
(i)
The tumor cell population is assumed to grow logistically in the absence of immune cells and chemotherapeutic drug.
-
(ii)
The tumor cells are being destroyed at a rate proportional to the product of tumor cell biomass and immune cell biomass.
-
(iii)
There is a loss in the immune cells due to encounters of tumor cells which is assumed to be proportional to the product of the tumor cell biomass and immune cell biomass.
-
(iv)
The presence of tumor cells stimulates the immune response, which is represented by the positive nonlinear growth term for the immune cells: \(\frac{\rho T^2 I}{h+T^2}\) [9].
-
(v)
The presence of immunotherapeutic drug stimulates the immune response, which is represented by the positive nonlinear growth term for the immune cells: \(\frac{\beta D_2 I}{g+D_2}\) [9].
-
(vi)
Chemotherapeutic drug destroys tumor cells as well as immune cells, i.e., chemotherapeutic drug has a negative effect on both tumor cells and immune cells.
Behaviour of the Solutions of System (1)
In order to understand the behaviour of the solutions of system (1), we have considered the dose of chemotherapeutic drug given u(t) as a constant with value \(u(t)=u\) and the dose of immunotherapeutic drug given v(t) as a constant with value \(v(t)=v\).
Theorem 1
Every solution of system (1) with initial conditions (2) exists in the interval \([0,\infty )\) and
Proof
Since the right hand side of system (1) is completely continuous and locally Lipschitzian on C, the solution \((T(t),I(t),D_1(t),D_2(t))\) of (1) with initial conditions (2) exists and is unique on \([0,\xi ],\) where \(0<\xi <+\infty \) [21]. It follows from the first equation of system (1) that
From the second equation of system (1), we get
From the third equation of system (1), we get
Similarly, from the forth equation of system (1), we get
Therefore, we can see that
This completes the proof. \(\square \)
Theorem 2(a)
\(T(t), D_1(t), D_2(t)\) of system (1) subject to initial conditions (2) are bounded.
Proof
From the first equation of system (1) it follows that
From the standard Kamke comparison theory [33], we get
From the third equation of system (1), we get
Therefore,
Similarly, from the forth equation of system (1), we get
Therefore,
Hence the theorem. \(\square \)
Theorem 2(b)
I(t) may be bounded under some conditions among the parameters and the bounds of \(T(t), D_1(t), D_2(t)\) for \(t>0.\)
Proof
From the second equation of system (1) it follows that
Let us assume that, \(\sup T(t)=T_s, \inf T(t)=T_i, \sup D_1(t)=D_{1_s}, \inf D_1(t)=D_{1_i}, \sup D_2(t)=D_{2_s}, \inf D_2(t)=D_{2_i}\) as \(T(t), D_1(t)\) and \(D_2(t)\) are bounded.
Now,
Therefore,
So,
Therefore, we can conclude that I(t) may be bounded under some conditions among the parameters and the bounds of \(T(t), D_1(t), D_2(t)\) for \(t>0.\)
Hence the theorem. \(\square \)
Equilibria: Their Existence and Stabilities
In this section we will study the existence and stability behaviour of the system (1) at various equilibrium points. In order to understand the dynamics of system (1), we have considered the dose of chemotherapeutic drug given u(t) as a constant with value \(u(t)=u\) and the dose of immunotherapeutic drug given v(t) as a constant with value \(v(t)=v\). The equilibria of the system (1) are:
-
(i)
Tumor free equilibrium: \(\bar{E}(0,\bar{I},\bar{D_1},\bar{D_2}),\) where
$$\begin{aligned} \bar{I}= & {} \frac{s\gamma _1(g\gamma _2+v)}{uvq_2+gq_2u\gamma _2+ \mu g\gamma _1\gamma _2+v\gamma _1(\mu -\beta )},\\ \bar{D_1}= & {} \frac{u}{\gamma _1},\\ \bar{D_2}= & {} \frac{v}{\gamma _2}, \end{aligned}$$and
-
(ii)
Coexisting Equilibrium: \(E^*(T^*,I^*,D_1^*,D_2^*).\)
Tumor Free Equilibrium
\(\bar{E}(0,\bar{I},\bar{D_1},\bar{D_2})\) exists only when \(\bar{I}>0,\) i.e., \((uvq_2+gq_2u\gamma _2+\mu g\gamma _1\gamma _2+v\gamma _1\mu )> v\gamma _1\beta .\)
Now, the variational matrix of system (1) at \(\bar{E}(0,\bar{I},\bar{D_1},\bar{D_2})\) is given by
Therefore, eigenvalues of the characteristic equation of \(V(\bar{E})\) are
It is clear that \(\lambda _2, \lambda _3, \lambda _4\) are negative. Now, \(\bar{E}\) is stable if \(\lambda _1<0,\) i.e., \(r-\alpha _1\bar{I}-q_1\bar{D_1}<0\) which implies that \(\bar{I}>\frac{r}{\alpha _1}-\frac{q_1 u}{\alpha _1 \gamma _1}\). So, we come to the following theorem:
Theorem 3
The tumor free equilibrium \(\bar{E}(0,\bar{I},\bar{D_1},\bar{D_2})\) of system (1) exists and is locally asymptotically stable if \(\mathrm{(i)} \ (uvq_2+gq_2u\gamma _2+\mu g\gamma _1\gamma _2+v\gamma _1\mu )> v\gamma _1\beta \ \text {and} \ \ \mathrm{(ii)} \ \bar{I}>\frac{r}{\alpha _1}-\frac{q_1 u}{\alpha _1 \gamma _1}.\)
Coexisting Equilibrium
Existence of Coexisting Equilibrium \(E^*(T^*,I^*,D_1^*,D_2^*)\)
At coexisting equilibrium \(E^*(T^*,I^*,D_1^*,D_2^*),\) the tumor is present and the followings hold:
Solving the equations of system (1) at the equilibrium state we get
Now, putting the values of \(T^{*}, D_1^{*}, D_2^{*}\) into the second equation of (1) and simplifying we obtain
where
Obviously \(a_{1}\) and \(a_5\) are always positive. Now using Descartes’ rule of signs in Eq. (3) we obtain:
-
(i)
if \(a_{2}>0, a_{3}>0, a_{4}>0,\) then there is no change of sign, so there exists no positive roots of Eq. (3),
-
(ii)
if \(a_{2}<0, a_{3}>0, a_{4}>0,\) there exists two or no positive roots of Eq. (3),
-
(iii)
if \(a_{2}>0, a_{3}<0, a_{4}>0,\) there exists two or no positive roots of Eq. (3),
-
(iv)
if \(a_{2}>0, a_{3}>0, a_{4}<0,\) there exists two or no positive roots of Eq. (3),
-
(v)
if \(a_{2}<0, a_{3}<0, a_{4}>0,\) there exists two or no positive roots of Eq. (3),
-
(vi)
if \(a_{2}<0, a_{3}<0, a_{4}<0,\) there exists two or no positive roots of Eq. (3),
-
(vii)
if \(a_{2}<0, a_{3}>0, a_{4}<0,\) there exists four or two or no positive roots of Eq. (3).
Therefore, \(I^*\) may have a non-trivial positive value if any one of the above six conditions [(ii)–(vii)] is satisfied.
Here,
Summarizing the previous discussions we come to the following theorem:
Theorem 4
The coexisting equilibrium \(E^*(T^*,I^*,D_1^*,D_2^*)\) of system (1) may exist if \(I^*<\frac{r}{\alpha _1}-\frac{q_1 u}{\alpha _1 \gamma _1}\) and any one of the above six conditions [(ii)–(vii)] is satisfied, i.e., at lest one of \(a_2, a_3, a_4\) is negative.
Stability Analysis of Coexisting Equilibrium \(E^*(T^*,I^*,D_1^*,D_2^*)\)
The variational matrix of system (1) at \(E^*(T^*,I^*,D_1^*,D_2^*)\) is given by
Therefore, eigenvalues of the characteristic equation of \(V(E^*)\) are \(-\gamma _1, -\gamma _2\) and the solution of the following equation:
where
and
Here, it is clear that \(A_1>0.\) Now, \(P(\lambda )=0\) has roots with negative real parts if \(A_2>0,\) i.e.,
Theorem 5
The coexisting equilibrium \(E^*(T^*,I^*,D_1^*,D_2^*)\) of system (1) is locally asymptotically stable if
Tumor Growth Model with Control
In the context of mathematical modelling in cancer growth with chemotherapy and immunotherapy, it is essential to frame an optimal control problem so that the total amount of drugs used is minimized. This is done because of the implicit understanding that both chemotherapy and immunotherapy have damaging side-effects. We have considered the tumor growth model (1). Now let us assume that the dose of chemotherapeutic and immunotherapeutic drugs are given as functions of time denoted by \(u_1(t)\) and \(u_2(t)\) respectively. We will use \(u_1(t)\) and \(u_2(t)\) as controls to decrease the tumor burden minimizing total drugs administered. Here we consider quadratic control to quantify this goal. Therefore our tumor growth model with controls (chemotherapeutic and immunotherapeutic drug controls) become:
Satisfying
The objective functional [5, 22, 28, 36, 37, 39, 41] is defined as
where \(B_1\) and \(B_2\) are positive constants to keep a balance in the size of the terms. The square of the control variables reflect the severity of the side effects of the drugs imposed. Here the functional given in (7) should be minimized to decrease the tumor growth minimizing total drugs administered. So, we seek an optimal control pair \((u_1^{*},u_2^{*})\) such that
where \(U=\{(u_1,u_2)\):\(u_i\) is measurable, \(0\le u_i \le 1, t \in [0,t_f],\) for \(i=1,2\}\) is the admissible control set.
Existence of an Optimal Control Pair
Theorem 6
There exists an optimal control pair \((u_1^{*},u_2^{*})\) such that
subject to the control system (5) with initial conditions (6).
Proof
The existence of an optimal control pair can be proved by using the results from Fleming and Rishel [20]. It is clear that the system of Eqs. (5) is bounded from above by a linear system. The boundedness of solutions of system (5) for a finite time interval is used to prove the existence of an optimal control. To use the theorem in [20], we first check the following properties:
-
1.
The set of controls and corresponding state variables is non-empty.
-
2.
The control set U is convex and closed.
-
3.
The right hand side of the state system is bounded by a linear system in the state control.
-
4.
The integrand of the objective functional is convex on U.
-
5.
There exist constants \( c_1,c_2>0\) and \(q>1\) such that the integrand of the objective functional satisfies
$$\begin{aligned} T+B_1u_1^{2}+B_2u_2^{2} \ge c_1 \left( \mid u_1 \mid ^{2}+\mid u_2 \mid ^{2}\right) ^{\frac{q}{2}}-c_2. \end{aligned}$$
In order to verify the first condition, we use a result by Lukes([29], Theorem 9.2.1) for system (5) with bounded coefficients. The control set U is convex and closed by definition, which gives condition 2. It is obvious that the right hand side of state system (5) satisfies condition 3. The integrand in the objective functional, \(T+B_1u_1^{2}+B_2u_2^{2},\) is clearly convex on \((u_1,u_2),\) which gives condition 4. Finally there are \(c_1,c_2>0\) and \(q>1\) satisfying
because the state variables are bounded in a finite time interval. Using these conditions we can conclude that there exists an optimal control pair \((u_1^{*},u_2^{*})\) such that
\(\square \)
Characterization of the Optimal Control Pair
In order to derive the necessary conditions for optimal control, Pontryagin’s Maximum Principle [34] is invoked.
The Hamiltonian is defined as follows:
where \(\lambda _i (t), i=1,2,3,4,\) are the adjoint functions to be determined suitably.
The form of the adjoint equations and transversality conditions are standard results from Pontryagin’s Maximum Principle [34]. The adjoint system can be obtained as follows:
The transversality conditions (or boundary conditions) are:
By the optimality condition, we have
and
By using the bounds for the control \(u_1(t),\) we get
In compact notation:
By using the bounds for the control \(u_2(t),\) we get
In compact notation:
Using (15) and (17) we obtain the following optimal system:
subject to the following conditions:
and
The previous analysis can be summarized in the following theorem:
Theorem 7
There exists an optimal control pair \((u_1^*,u_2^*)\) and corresponding solutions \(\bar{T}^{*},\bar{I}^{*},\bar{D_1}^{*},\bar{D_2}^{*}\) that minimize \(J(u_1(t),u_2(t))\) over U. The explicit optimal controls are connected to the existence of continuous adjoint functions \(\lambda _i(t), i=1,2,3,4,\) by the solutions of the following adjoint system:
subject to the transversality conditions:
Furthermore, the following properties hold:
Numerical Simulations
Analytical studies can never be completed without numerical verification of the derived results. In this section we present computer simulations of some important analytic results of our system which has been discussed in previous sections. Beside the verification of our analytical findings, these numerical simulations are very important from a practical point of view.
We first consider the case of a tumor free equilibrium using the parameter values given in Table 1 [2, 6, 9, 14, 26, 32]. Using these parameter values, for different initial conditions the dynamics of the model is presented in Fig. 1a–d. These figures show that the immune cell population, the amount (or concentration) of chemotherapeutic drug and the amount (or concentration) of immunotherapeutic drug exist (\(\bar{I}=1.61765, \bar{D_1}=0.11111, \bar{D_2}=0.5\)) and the tumor cell population declines to zero (\(\bar{T}=0\)), i.e., the system approaches the tumor free equilibrium \(\bar{E}(0,1.61765,0.11111,0.5).\) Here, \(\bar{I}>\frac{r}{\alpha _1}-\frac{q_1u}{\alpha _1\gamma _1},\) which shows that \(\bar{E}\) is locally asymptotically stable (according to Theorem 3) using the parameter values given in Table 1 and our numerical verification (Fig. 1a–d) supports these results.

Time series plot of the a tumor cell (T), b immune cell (I), c amount (or concentration) of chemotherapeutic drug (\(D_1\)), d amount (or concentration) of immunotherapeutic drug (\(D_2\)) with various initial conditions, parameter values given in Table 1
Next, we consider the case of a coexisting equilibrium using the parameter values given in Table 2 [2, 6, 9, 14, 26, 32]. Using these parameter values, for different initial conditions the dynamics of our system is presented in Fig. 2a–d. These figures show that the tumor cell population, the immune cell population, the amount (or concentration) of chemotherapeutic drug and the amount (or concentration) of immunotherapeutic drug all exist \([(T^{*},I^{*},D_1^{*},D_2^{*})=(9.7837 \times 10^8,0.0000991821,0.1111111,0.5)],\) i.e., the system tends to a coexisting equilibrium \(E^*.\) This indicates that irrespective of the initial conditions tumor cells, immune cells and both kinds of drug concentrations all approach a coexisting equilibrium \(E^*\) with increasing time which shows that \(E^*\) is locally asymptotically stable. Here, \(I^*<\frac{r}{\alpha _1}-\frac{q_1u}{\alpha _1\gamma _1},\) which shows that the tumor free equilibrium (0, 1.61765, 0.1, 0.5) becomes unstable and only the coexisting equilibrium \(E^*\) exists using the parameter values given in Table 2 (according to Theorems 3, 4). Our numerical verification (Fig. 2a–d) supports these results. In other words, through this result and the observations from simulations we see that any tumor size \(T>0\) will grow to this maximal tumor size. At the point \(E^*,\) the tumor is so large that it has reached its carrying capacity and it can not grow further. If the tumor is not reduced, then the immune cell population can not sustain itself. Therefore, biologically this situation means that the immune system begins to fail.

Time series plot of the a tumor cell (T), b immune cell (I), c amount (or concentration) of chemotherapeutic drug (\(D_1\)), d amount (or concentration) of immunotherapeutic drug (\(D_2\)) with various initial conditions, parameter values given in Table 2
The optimal system is solved numerically and the results are presented graphically. This optimal system is a two-point boundary value problem with separated boundary conditions at times \(t=0\) and \(t=t_f.\) Here, we have solved this two-point boundary value optimal problem for \(t_f=100.\) The value is chosen to represent the time in days at which treatment is stopped. An efficient method to solve two-point BVPs numerically is collocation. A convenient collocation code is the solver BVP4c implemented under MATLAB, which can be used to solve non-linear two-point BVPs. To solve our BVP we have used the collocation method with collocation code solver BVP4c. It is a powerful method to solve the two-point BVP resulting from the optimality conditions.

Time series plot of the tumor cell (T), immune cell (I), amount (or concentration) of chemotherapeutic drug (\(D_1\)) and amount (or concentration) of immunotherapeutic drug (\(D_2\)) with chemotherapeutic drug control (\(u_1\)) and immunotherapeutic drug control (\(u_2\)), parameter values given in Table 3 with \(B_1=5, B_2=30\)

Time series plot of the tumor cell (T) and immune cell (I) without any control, parameter values given in Table 3 \(B_1=5, B_2=30\)
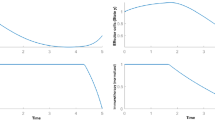
The different variables (cell populations and control functions) in the objective functional given in (7) have different scales. Hence they are balanced by choosing weight constants \(B_1=5, B_2=30\) in the objective functional given in (7). The numerical results for the optimal problem are obtained by using the parameter values given in Table 3 [2, 6, 9, 14, 26, 32]. At first we search for the optimal control pair \((u_1(t),u_2(t)),\) chemotherapeutic and immunotherapeutic drug controls respectively. These optimal control functions \(u_1(t)\) and \(u_2(t)\) are designed in such a way that they minimize the objective functional given by (7), i.e., minimize the number of tumor cells and the chemotherapeutic and immunotherapeutic drug administration. In Fig. 3 we present the time series diagrams of tumor cell (T), immune cell (I), amount (or concentration) of chemotherapeutic drug (\(D_1\)) and amount (or concentration) of immunotherapeutic drug (\(D_2\)) with both controls (\(u_1\ne 0, u_2\ne 0\)). In this figure, we notice that the tumor cell population is quickly driven to a much lower level and remains there. The immune cell population increases over time. The amount (or concentration) of chemotherapeutic drug is initially high for a short period of time, after which it falls rapidly and the amount (or concentration) of immunotherapeutic drug falls rapidly over time. In Fig. 4, we present the time series plot of tumor cell (T) and immune cell (I) with no control (\(u_1=u_2=0\)). In this figure we can notice that the tumor cell population is continuously increasing over time, while the immune cell population increases and after that it remains in a stationary state. Therefore, it is depicted in Figs. 3 and 4, the tumor cell population (T) level obtained using chemotherapeutic and immunotherapeutic drug controls is lower than its counter part which results from practicing without control. Comparing Figs. 3 and 4, we can realize the utility of using controls in our system.
Next, in Fig. 5 we present the time series plot of the tumor cell population (T) with no control (\(u_1=u_2=0\)), with immunotherapeutic drug control only (\(u_1=0, u_2\ne 0\)), with chemotherapeutic drug control only (\(u_1\ne 0, u_2=0\)) and with both controls (\(u_1\ne 0, u_2\ne 0\)). In the case of no control and with immunotherapeutic drug control only, we notice that the tumor cell population is continuously increasing over time while the tumor cell population initially decreases slowly for a short time period, after which it falls rapidly using chemotherapeutic drug control only. But using both chemotherapeutic and immunotherapeutic drug controls the tumor cell population is quickly driven to a much lower level and is forced to remain there for the duration of the run. This study and observations show that with only immunotherapeutic drug control there is no remarkable change in the nature of tumor growth while with only chemotherapeutic drug control there is a remarkable change in the nature of tumor growth and gives us a much better result. But using both controls together we can get the best result as it lowers the growth level of the tumor cell population very quickly. From these observations we can conclude that intervention practices involving both chemotherapeutic and immunotherapeutic drug controls yield an effectively better result.

Time series plot of the tumor cell (T) with no control (\(u_1=u_2=0\)), with immunotherapeutic drug control only (\(u_1=0, u_2\ne 0\)), with chemotherapeutic drug control only (\(u_2=0, u_1\ne 0\)) and with both controls (\(u_1\ne 0, u_2\ne 0\)), parameter values given in Table 3 \(B_1=5, B_2=30\)
The optimal control graphs for chemotherapeutic drug control (\(u_1\)) and immunotherapeutic drug control (\(u_2\)) are presented in Fig. 6a, b. One could conclude from these diagrams that full effort must be given in both chemotherapeutic and immunotherapeutic drug controls at the beginning of the disease to control the spread of tumor cells. This means that both the controls are very important at the beginning of the disease than when the disease prevails. The optimal control graph for the objective functional (J) is presented in Fig. 7. From this figure, we can observe that the chemotherapeutic drug control (\(u_1\)) and immunotherapeutic drug control (\(u_2\)) minimize the objective functional (J) given in (7). Overall the numerical analysis demonstrates that two controls \(u_1(t)\) and \(u_2(t)\) decrease the tumor burden minimizing total drug administered. Numerical simulations also support the theoretical characterization of the optimal control.

The optimal control graph for a chemotherapeutic drug control (\(u_1\)) and b immunotherapeutic drug control (\(u_2\)) using the parameter values given in Table 3 with \(B_1=5, B_2=30\)

The optimal control graph for the objective functional (J) using the parameter values given in Table 3 with \(B_1=5, B_2=30\)
Discussions and Conclusions
In this paper, we consider a malignant tumor growth model exhibiting the effect of tumor–immune interaction with chemotherapeutic as well as immunotherapeutic drugs. Here we explore the effects and interactions of tumor cells and immune cells through a system of non-linear differential equations. We also consider the effects of chemotherapeutic and immunotherapeutic drugs on our system. We have discussed dynamical behaviour of our system by analyzing the existence and stability of our system at various equilibrium points.
The most important part of this paper is to set up an optimal control problem related to the model so as to minimize the number of tumor cells. We consider the administration of chemotherapeutic and immunotherapeutic drugs as two controls to reduce the spread of the tumor growth. Here we use a quadratic control to quantify this goal. The control functions \(u_1(t)\) and \(u_2(t)\) are designed in such a way that they can minimize the objective functional as given in (7).
The important mathematical findings for the dynamical behaviour of the tumor–immune model are also numerically verified using MATLAB. The nature of the equilibria for different sets of parameter values and different initial conditions are graphically presented. The graphical representation of the model with control/controls as well as without control are presented for tumor cells and immune cells so that we can compare them and can understand the necessity of using the controls. It is observed that the optimal control is much more effective for reducing the number of tumor cells to near zero. This study and observations show that with only immunotherapeutic drug control there is no remarkable change in the nature of tumor growth while with only chemotherapeutic drug control there is a remarkable change in the nature of tumor growth and gives us a much better result. But using both controls together we can get the best result as it lowers the growth level of tumor cell population very quickly. From these observations we can conclude that intervention practices involving both chemotherapeutic and immunotherapeutic drug controls yield an effectively better result. Overall the numerical analysis demonstrates that a burst of treatment at the beginning is the best way to fight against the tumor cells. Numerical simulations are in good agreement with the theoretical characterization of the optimal control.
The mathematical models on tumor growth make us the understanding of the nature of tumor–immune dynamics. Our model formulation is based on the effects and interactions of tumor cells and immune cells and also the effects of chemotherapeutic and immunotherapeutic drugs on the system. We also consider a model with controls where the administration of chemotherapeutic and immunotherapeutic drugs are treated as controls. Our model can provide an approximate estimation of timing and dosage of therapies that would be the best complement of the patient’s own defense mechanism versus the tumor cells. As with many models, the mathematical model presented in this paper should be treated with circumspection due to the assumptions made and the difficulties in the estimation of the model parameters. Most of the parameters are dependent on many factors, so they are rarely constant. But for the simplification of the system that these parameters are taken as constants. There are many components in this model that may be regarded as stochastic rather than deterministic and these variations may significantly alter the dynamics of the system. Therefore, we can incorporate stochastic differential equations in our model and study its dynamics as our future work. The development of various cancer therapies and identification of the most effective therapy against the spread of tumor cells are the primary goal of health administrators, policy-makers and researchers. Our model study is a small step towards this goal.
References
Arciero, J.C., Jackson, T.L., Kirschner, D.E.: A mathematical model of tumor-immune evasion and siRNA treatment. Discret. Cont. Dyn. Syst. Series B 4(1), 39–58 (2004)
Bannock, L.: Nutrition. Available from: http://www.doctorbannock.com/nutrition.html
Bellomo, N., Bellouquid, A., Delitala, M.: Mathematical topics on the modelling of multicellular systems in competition between tumor and immune cells. Math. Mod. Math. Appl. Sci. 14, 1683 (2004)
Bellomo, N., Preziosi, L.: Modelling and mathematical problems related to tumor evolution and its interaction with the immune system. Math. Comput. Model. 32, 413 (2000)
Blayneh, K., Cao, Y., Kwon, H.D.: Optimal control of vector-borne disease: treatment and prevention. Discret. Cont. Dyn. Sys. Series B 11, 1–31 (2009)
Calabresi, P., Schein, P.S. (eds.): Medical Oncology: Basic Principles and Clinical Management of Cancer, 2nd edn. McGraw-Hill, New York (1993)
Chan, B.S., Yu, P.: Bifurcation analysis in a model of cytotoxic T-lymphocyte response to viral infections. Nonlinear Anal.: Real World Appl. 13, 64–77 (2012)
de Pillis, L.G., Gu, W., Fister, K.R., Head, T., Maples, K., Murugan, A., Neal, T., Yoshida, K.: Chemotherapy for tumors: an analysis of the dynamics and a study od quadratic and linear optimal controls. Math. Biosci. 209, 292–315 (2007)
de Pillis, L.G., Gu, W., Radunskaya, A.E.: Mixed immunotherapy and chemotherapy of tumors: modeling, applications and biological interpretations. J. Theo. Biol. 238, 841–862 (2006)
de Pillis, L.G., Radunskaya, A.E.: A mathematical tumor model with immune resistance and drug therapy: an optimal control approach. J. Theor. Med. 3, 79 (2001)
de Pillis, L.G., Radunskaya, A.E.: The dynamics of an optimally controlled tumor model: a case study. Math. Comp. Model. 37, 1221–1244 (2003)
de Pillis, L.G., Radunskaya, A.E., Wiseman, C.L.: A validatted mathematical model of cell-mediated immune response to tumor growth. Cancer Res. 61(17), 7950 (2005)
Derbel, L.: Analysis of a new model for tumor-immune system competition including long time scale effects. Math. Model Methods Appl. Sci. 14, 1657 (2004)
Diefenbach, A., Jensen, E.R., Jamieson, A.M., Raulet, D.: Real and H60 ligands of the NKG2D receptor stimulate tumor immunity. Nature 413, 165 (2001)
d’Onofrio, A.: A general framework for modeling tumor-immune system competition and immunotherapy: mathematical analysis and biomedical references. Physica D 208, 220 (2005)
Engelhart, M., Lebiedz, D., Sager, S.: Optimal control for selected cancer chemotherapy ODE models: a view on the potential of optimal schedules and choice of objective function. Math. Biosci. 229, 123–134 (2011)
Fister, K.R., Donnelly, J.: Immunotherapy: an optimal control theory approach. Math. Biosci. Eng. 2(3), 499 (2005)
Fister, K.R., Panetta, J.C.: Optimal control applied to cell-cycle specific cancer chemotherapy. SIAM J. Appl. Math. 60(3), 1059 (2000)
Fister, K.R., Panetta, J.C.: Optimal control applied to competing chemotherapeutic cell-kill strategies. SIAM J. Appl. Math. 63(6), 1954 (2003)
Fleming, W.H., Rishel, R.W.: Deterministic and Stochastic Optimal Control. Springer, New York (1975)
Hale, J.K.: Theory of Functional Differential Equations. Springer, New York (1977)
Joshi, H.R.: Optimal control of an HIV immunology model. Optim. Control Appl. Methods 23, 199–213 (2002)
Kirschner, D., panetta, J.: Modelling immunotherapy of the tumor–immune interaction. J. Math. Biol. 37, 235–252 (1998)
Kolev, M.: Mathematical modelling of the competition between tumors and immune system considering the role of the antibodies. Math. Comput. Model. 37, 1143–1152 (2003)
Kuznetsov, V., Knott, G.D.: Modeling tumor regrowth and immunotherapy. Math. Comp. Model. 33, 1275 (2001)
Kuznetsov, V., Makalkin, I.: Bifurcation analysis of mathematical model of interactions between cytotoxic lymphocytes and tumor cells- effect of immunological amplification of tumor growth and its connection with other phenomena of oncoimmunology. Biofizika 37(6), 1063–1070 (1992)
Kuznetsov, V., Taylor, M.: Nonlinear dynamics of immunogenic tumors: parameter estimation and global bifurcation analysis. Bull. Math. Biol. 56(2), 295–321 (1994)
Lcnhart, S., Workman, J.T.: Optimal Control Applied to Biological Mathods. Chapman and Hall/CRC, London (2007)
Lukes, D.L.: Differentia; Equations: Classical to Controlled, Mathematics in Science and Engineering. Academic Press, New York (1982)
Matveev, A., Savkin, A.: Application of optimal control theory to analysis of cancer chemotherapy regimens. Syst. Control Lett. 46, 311 (2002)
Nani, F., Freedman, H.I.: A mathematical model of cancer treatment by immunotherapy. Math. Biosci. 163, 159 (2000)
Perry, M.C. (ed.): The Chemotherapy Source Book, 3rd edn. Li ppinott Williams and Wilkins, Philadelphia (2001)
Pinho, S.T.R., Bacelar, F.S., Andrade, R.F.S., Freedman, H.I.: A mathematical model for the effect of anti-angiogenic therapy in the treatment of cancer tumors by chemotherapy. Nonlinear Anal.: Real World Appl. 14, 815–828 (2013)
Pontryagin, L.S., Boltyanskii, V.G., Gamkrelidze, R.V., Mishchenko, E.F.: The Mathematical Theory of Optimal Process. Gordon and Breach, New York (1962)
Sharma, S., Samanta, G.P.: Dynamical behaviour of a tumor-immune system with chemotherapy and optimal control. J. Nonlinear Dyn. Vol. 2013, Article ID 608598, p. 13 (2013). doi:10.1155/2013/608598
Siu, H., Vitetta, E.S., May, R.D., Uhr, I.W.: Tumor dormancy. I. Regression of bcl tumor and induction of a dormant tumor state in mice chimeric at the major histocompatibility complex. J. Immunol. 137, 1376–1382 (1986)
Swan, G.W.: Applications of Optimal Control Theory in Biomedicine. Marcel Dekker, New York (1984)
Takayanagi, T., Ohuchi, A.: A mathematical analysis of the interactions between immunogenic tumor cells and cytotoxic T lymphocytes. Microbiol. Immunol. 45, 709 (2001)
Tchuenche, J.M., Khamis, S.A., Agusto, F.B., Mpeshe, S.C.: Optimal control and sensitivity analysis of an influenza model with treatment and vaccination. Acta Biotheor. 59, 1–28 (2011)
Yafia, R.: Dynamics analysis and limit cycle in a delayed model for tumor growth with quiescene. Nonlinear Anal.: Model. Cont. 11, 95–110 (2006)
Zaman, G., Kang, Y.H., Jung, H.: Stability analysis and optimal vaccination of an SIR epidemic model. Biosystem 93, 240–249 (2008)
Acknowledgments
The authors are very grateful to the anonymous referees and the Editor-in-Chief for their careful reading, valuable comments and helpful suggestions, which have helped them to improve the presentation of this work significantly.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sharma, S., Samanta, G.P. Analysis of the Dynamics of a Tumor–Immune System with Chemotherapy and Immunotherapy and Quadratic Optimal Control. Differ Equ Dyn Syst 24, 149–171 (2016). https://doi.org/10.1007/s12591-015-0250-1
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12591-015-0250-1