
Abstract
In this paper, we apply the strongly continuous cosine family of bounded linear operators to study the explicit representation of solutions for second order linear impulsive differential equations, and we give sufficient conditions for asymptotical stability of solutions. In addition we study the exponential stability of the linear perturbed problem. Existence and uniqueness of solutions of the initial value problem for nonlinear second order impulsive differential equations is obtained and we present Ulam–Hyers–Rassias stability results. Examples are provided to illustrate the applicability of our results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The states of many evolutionary processes are often subject to instantaneous perturbations and experience abrupt changes at certain moments of time. Usually the duration of the changes is very short and negligible in comparison with the duration of the process considered so as a result it is natural to study differential equations with instantaneous impulses. The mathematical investigation of impulsive ordinary differential equations began with Milman and Myshkis [1] where some general concepts of systems with an impulse effect were given and also results for the stability of solutions were presented. Inspired by [1] a number of results on the qualitative analysis for impulsive differential equations appeared in the literature, see [2,3,4,5,6,7].
As a very important branch of control theory, stability has a wide range of applications in various fields, such as nonlinear control, biological mathematics, gene network, chaos control and synchronization, etc. To study the approximate behaviors in dynamic systems, stability is a first question which one needs to study. In 1986, Hopfield reapplies the energy function to neural networks, and studies the asymptotic behavior of neural networks. This work pioneered neural optimization computing and associative memory, precedent for neural optimization calculations and associative memory, and plays an important role in the worldwide upsurge of neural network [8]. In particular, it is well known that exponential stability is closely related to Lyapunov exponents, exponential dichotomies, periodic solutions and so on, and the notion of exponential dichotomy plays a central role in the Hadamard-Perron theory of invariant manifolds for dynamical systems. In addition, some prior contributions have shown the relationship between exponential dichotomy and Hyers–Ulam stability for linear continuous/discrete differential systems, see [9,10,11,12,13]. Therefore, our work can broaden some of the results on other topics related to stability.
In [5], Samoilenko and Perestyuk considered the following linear impulsive system with constant coefficients,
where A and B are constant matrices, \(\tau _{i}\) are impulsive points, and \(\tau _{i}\rightarrow \infty \) as \(i\rightarrow \infty \). They assume that A and B are interchangeable, and, in Theorem 32, they obtained asymptotically stable result of (1) provided that
and some other conditions, where \(\theta _{0}\) is a related constant, \(\lambda _{j}(\cdot )\) denotes the eigenvalue. Then they also considered a special class of nonconstant coefficients linear impulsive system
in Theorem 12 and achieved the stable result if the solutions of linear system (1) are stable and
Following the linear problems, naturally, in Theorem 39, they considered the stability of solutions for first order approximation of nonlinear impulsive system, that is
Up to date, the literature concentrates on the stability of first order impulsive system. For existence and stability results on first order impulsive differential equations, one can see [5, 7, 14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31]. In [19] the authors considered general first order non-instantaneous impulsive ordinary differential equations and they obtain the stability of zero solutions of linear problems, the exponential stability of perturbed problems, existence, uniqueness of solutions and Ulam–Hyers–Rassias stability of nonlinear systems.
Inspired by the above results, in this paper, we aim to generalize the three results above to second order impulsive differential equations. We study the following initial problems of second order impulsive differential equations.
(i): Asymptotical stability of second order linear impulsive differential equations
where A, \(B_{1}\) and \(B_{2}\) are constant \(n\times n\) matrixes satisfying \(AB_{1}=B_{1}A\), \(AB_{2}=B_{2}A\), \(B_{1}B_{2}=B_{2}B_{1}\), \(0=t_{0}<t_{1}<\cdots<t_{i}<\cdots \) and \(t_{i}\rightarrow \infty \) are impulsive points.
(ii): Exponential stability of the linear perturbed problem
where A, \(B_{1}\), \(B_{2}\), \(t_{i}\) are as in (4) and P is a continuous matrix in \(\mathbb {R}^{+}\) outside \(t_{i}\).
(iii): Existence, uniqueness and Ulam–Hyers–Rassias stability of solutions for nonlinear second order impulsive differential equations
where A, \(B_{1}\), \(B_{2}\), \(t_{i}\) are as in (4) and \(f:[0,+\infty )\times \mathbb {R}^{n}\rightarrow \mathbb {R}^{n}\) is continuous.
Section 2 presents some lemmas and corollaries needed in the paper. In Sect. 3, we derive an explicit expression of (4) via mathematical induction, and then we consider the asymptotical stability of (4). Section 4 is devoted to the exponentially stability of (5). Finally, in Sect. 4, we study existence and uniqueness of solutions for (6) using the contraction mapping principle, and then we discuss the Ulam–Hyers–Rassias stability of solutions. In addition examples are provided to illustrate the applicability of our results.
2 Preliminary
In this section, we consider initial value problems of the second order linear differential equation
and the second order linear nonhomogeneous differential equation
where X is a Banach space, A is the infinitesimal generator of a uniformly continuous cosine family C(t) on X, \(u_{0}, u_{1}\in D(A)\) and \(f:[0,T]\rightarrow \mathbb {R}\) is continuous.
Lemma 2.1
(see [32]) Let A be an operator such that \(R(\lambda ^{2};A)\) exists in the half plane \(\Re \lambda >\omega \), C(t) an operator valued function strongly continuous in \(t\ge 0 \) and such that
Assume that, for each \(u\in X\),
Then the Cauchy problem (7) is uniformly well posed in \(t\ge 0\), and C(|t|) is the solution operator of (7).
Lemma 2.2
(see [32]) Let A be a bounded linear operator in a Banach space E. Then the Cauchy problem (7) is uniformly well posed in \(-\infty<t<+\infty \). The cosine function C(t) generated by A is given by
and the series (10) is uniformly convergent on compact subsets of \(-\infty<t<+\infty \). The other propagator S(t) is given by
and the series (11) converging in the same sense of (10).
Proof
We prove this result using Lemma 2.1. Therefore, the first task is to show that \(R(\lambda ^{2};A)\) exists in a certain half plane. Now A is an bounded linear operator, and we assume that \(||A||\le M\); here M is a positive constant. By Neumman’s theorem, we see that the operator \(\lambda ^{2}I-A\) is regular if \(|\lambda ^{2}|>M\). Hence \(R(\lambda ^{2};A)\) exists in the half plane \(\Re \lambda >M^{\frac{1}{2}}\). Define the cosine functions C(t) as in (10). Since \(||A||\le M\) we see that C(t) is well-defined, and C(t) is an operator valued function strongly continuous in \(t\ge 0\), and
We verify next that C(t) defined by (10) satisfied (9). Let \(u\in D(A)=E\), and \(T>0\). Now A is a closed operator. Using a well known result on closed operators [33] and integration by parts, we have
Let \(T\rightarrow \infty \) and we have
and hence,
Let \(u\in D(A)\subset E\). Since A is a closed, densely defined operator, for all \(u\in E\), there exists a sequence \(\{u_{k}\}\subset D(A)\) such that
in the norm of E. For all \(u_{k}\in D(A)\) we have
Taking the limit of both sides with respect to k, we have
Therefore, by Lemma 2.1, the Cauchy problem (7) is uniformly well posed in \(-\infty<t<+\infty \), and C(t) is a solution operator of (7) with \(u(0)=u_{0}\), \(u'(0)=0\). Now, \(S(t)u_{1}=\int _{0}^{t}C(s)u_{1}ds\), in other words,
which converges in the same sense of (10) is the solution operator of (7) with \(u(0)=0\), \(u'(0)=u_{1}\). \(\square \)
Remark 2.1
If we assume the existence of square roots of A and the existence of the inverse of square roots of A, then the series (10) and (11) in Theorem 2.2 can be expressed as
and
respectively.
For A a constant matrix we have the following corollary.
Corollary 2.1
Let A be a nonsingular constant matrix, and the square roots of A exist. Then the Cauchy problem (7) is uniformly well posed in \(-\infty<t<+\infty \), and the solutions of (7) is given by
Remark 2.2
Although the square roots of A are not unique, the expression (12) is well-defined. In fact, if \(A_{1}\) and \(A_{2}\) both are the square roots of A and satisfy the assumptions of Corollary 2.1, we have
and
Lemma 2.3
(see [32]) Assume that \(u_{0}, u_{1}\in D(A)\) and \(f(t)\in D(A)\), f(t), Af(t) are continuous in \(0\le t\le T\). Then the following initial value problem
has a solution
where \(C(t),t\in \mathbb {R}\) is a strongly continuous cosine family in X with infinitesimal generator A and associated sine function \(S(t), t\in \mathbb {R}\).
Lemma 2.4
(see [5, 34]) Let X be a Banach space with norm \(||\cdot ||\) and let F be a mapping of the ball \(||x||\le h\) (here \(h>0\)) in the space X into the space X and assume
here \(x,y \in X\). Also assume
Then the mapping F has a unique fixed point \(x_{0}\) (i.e. \(F(x_{0})=x_{0}\)).
Lemma 2.5
(see [19]) Let \(|\cdot |\) be a norm on \(\mathbb {R}^{n}\) and B be an \(n\times n\) matrix. Then for any \(\varepsilon >0\) there exists \(T_{B,\varepsilon }\ge 1\) such that \(||B^{k}||\le T_{B,\varepsilon }(\rho (B)+\varepsilon )^{k}\), where \(\rho (B)\) is the spectral radius of B.
Lemma 2.6
(see [35]) Let u(t), k(t, s) and its partial derivative \(k_{t}(t,s)\) be nonnegative continuous functions for \(\alpha \le s \le t\), and suppose
where \(a\ge 0\) is a constant. Then
Lemma 2.7
For any \(a>0\), \(0<t_{0}< t_{1}< t_{2}<\cdots< t_{k}< \cdots <\infty \) and
Then
here \(\lambda =\inf \{t_{i+1}-t_{i}|i\in \mathbb {N}\}\).
Proof
Note
This implies the result. \(\square \)
3 Solutions of Linear Second Order Impulsive Differential Equations
In this section, we present an expression of the solution of the second order linear impulsive system
where A, \(B_{1}\) and \(B_{2}\) are constant \(n\times n\) matrixes satisfying \(AB_{1}=B_{1}A\), \(AB_{2}=B_{2}A\), \(B_{1}B_{2}=B_{2}B_{1}\), \(0=t_{0}<t_{1}<\cdots<t_{i}<\cdots \) and \(t_{i}\rightarrow \infty \) are impulsive points, and we discuss the stability of solutions. For the sake of convenience in writing, we always set \(A^{\frac{1}{2}}t=x\), \(A^{\frac{1}{2}}t_{i}=x_{i}\), \(I+\frac{B_{1}+B_{2}}{2}=A_{1}\),\(\frac{B_{1}-B_{2}}{2}=A_{2}\),
Theorem 3.1
For all \(t\in (t_{k},t_{k+1}]\), the solution u(t) of (4) with initial value condition \(u(0)=u_{0}\), \(u'(0)=u_{1}\) is given as follows:
Proof
We use mathematical induction to show the result. For the case of \(k=0\), Corollary 2.1 shows (13) holds. Without loss of generality, assume (13) holds for \(k=2i\), that is
Next we show that (13) holds for \(k=2i+1\). By a direct calculation, we have
where \(y(x)=x-\)const. Hence for all \(t\in (t_{2i+1},t_{2i+2}]\), from Corollary 2.1, we have
Combine (14), (15), (16) with (17), so we see (13) holds for \(k=2i+1\). \(\square \)
Remark 3.1
Obviously, if \(A_{2}=0\), i.e., \(B_{1}=B_{2}\), then for all \(t\in (t_{k},t_{k+1}]\), we have
if \(A_{1}=0\), that is \(B_{1}=-2I-B_{2}\), then for all \(t\in (t_{k},t_{k+1}]\), we have
if \(A_{1}=A_{2}\), i.e., \(B_{2}=-I\), this means \(u'(t_{i})=0\), where \(t_{i}\in (0,t)\) are impulsive points. Then for all \(t\in (t_{k},t_{k+1}]\), we have
if \(A_{1}=-A_{2}\), that is \(B_{1}=-I\), this means \(u(t_{i})=0\), where \(t_{i}\in (0,t)\) are impulsive points. Then for all \(t\in (t_{k},t_{k+1}]\), we have
Definition 3.1
The zero solution of the second order impulsive initial value problem is called stable if for any \(\varepsilon >0\) there exists \(\delta (t_{0},\varepsilon )>0\) such that if \(||u_{0}||+||u_{1}||<\delta (t_{0},\varepsilon )\) then \(||u(t,t_{0},u_{0},u_{1})||+||u'(t,t_{0},u_{0},u_{1})||<\varepsilon \). The zero solution of the second order impulsive initial value problem is called asymptotically stable if it is stable and attractive, that is
Now we give sufficient conditions to guarantee the stability of (4).
Theorem 3.2
Assume that the following conditions hold
here i(0, t) is the number of impulsive points which belong to (0, t). Then (4) is asymptotically stable provided that the following inequality
is satisfied.
Proof
For all \(t\ge 0\), from Lemma 2.2, we find
and
Making use of Lemma 2.5, for \(t\ge 0\), and any constant a, we have
if \(t-2a\ge 0\), then we have
if \(t-2a\le 0\), we find
Similarly,
if \(t-2a\ge 0\), then we have
if \(t-2a\le 0\), we get
Next we show that
It follows from Lemma 2.5, (13), (21), (22), (23) and (24) that
where \(\Delta _{1}=2\max \{\frac{1}{\sqrt{\rho (A)+\varepsilon }},\sqrt{\rho (A)+\varepsilon }\}T_{\varepsilon }^{3}\), \(T_{\varepsilon }=\max \{T_{A,\varepsilon },T_{A_{1},\varepsilon },T_{A_{2},\varepsilon }\}\) and \(k=i(0,t)\) is the number of impulsive points which belong to (0, t). If (19) holds, we have
for any \(t>0\) large enough. Consequently, using \(\rho \left( I+\frac{B_{1}+B_{2}}{2}\right) +\rho \left( \frac{B_{1}-B_{2}}{2}\right) < 1\) and (26), we have
For \(\varepsilon >0\) sufficiently small, from (20), we have
Thus, from (27), we have that
for any \(t>0\) large enough. Hence, (25) holds. Since for \(t\in (t_{k},t_{k+1}]\),
where \(a=t_{i_{j}}-t_{i_{j-1}}+\cdots \pm t_{i_{1}}\), \(i<i_{1}<i_{2}<\cdots <i_{j}\le k\). Using the same method as that of \(u(t,0,u_{0},u_{1})\), we also have
for any \(t>0\) large enough. Therefore,
\(\square \)
Remark 3.2
Theorem 3.2 show that second order differential systems instable can be stable by adding an impulsive impact.
In the following example we provide an application of Theorem 3.2.
Example 3.1
Consider (4) with
and the initial value
respectively. Let \(t_{i}=i\). Clearly, (19) holds. In addition, we have
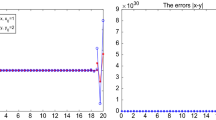
Hence, Theorem 3.2 implies the solution of (4) with (29) and (30) is asymptotical stability. Indeed, from (18), the solution of (4) with (29) and (30) is
It is easy to see u(t) is asymptotical stability in \([0,+\infty )\) (see Fig. 1).

Red line denotes \(\overline{u}(t)\) and blue line denotes \(\hat{u}(t)\) in (31), respectively
4 Second Order Linear Perturbed Problem
In this section, we study the exponential stability of the linear perturbed problem
where A, \(B_{1}\), \(B_{2}\), \(t_{i}\) are as in (4) and P is a continuous matrix in \(\mathbb {R}\) outside \(t_{i}\).
To this end, we present an explicit solutions of the following second order linear nonhomogeneous initial value problem
here \(f:(t_{i},t_{i+1}]\rightarrow \mathbb {R}\) is continuous.
Theorem 4.1
For all \(t\in (t_{k},t_{k+1}]\), the solutions u(t) of (32) have the following form
where \(W(A,t,u_{0},u_{1})\) is the solution of the initial value problem (4), and
Proof
It follows from Lemma 2.3 that (33) holds for \(k=0\). Without loss of generality, assume that (33) holds for \(k=2m-1\), that is
Note
where a is an arbitrary constant. Thus combining (35), (34) with Lemma 2.3, we see that (33) holds for \(k=2m\). \(\square \)
Definition 4.1
System (32) is uniformly exponentially stable if there exists \(N>0\) and \(\alpha >0\) such that the solution of (32) satisfies the estimate
Theorem 4.2
Assume that (19) hold. Suppose
and p in (19) satisfies
Then, the solution of (5) is exponentially stable.
Proof
According to Theorem 4.1, the solution u(t) of (5) can be expressed in the following form,
Following the proof process of (26), we have
Next, we give an estimate on \(||W_{i}(A,t,s)||\). For all \(i<i_{1}< i_{2}<i_{3}\le k \), if \(t-2t_{i_{2}}+2t_{i_{1}}-s \ge 0\), \(t-2t_{i_{3}}+2t_{i_{2}}-2t_{i_{1}}+s\ge 0\), we have
If \(t-2t_{i_{2}}+2t_{i_{1}}-s \le 0\), \(t-2t_{i_{3}}+2t_{i_{2}}-2t_{i_{1}}+s\le 0\), we have
Therefore, for any \(i<i_{1}<i_{2}<\cdots <i_{j}\le k\), we have
Hence, making use of Lemma 2.5 and (39), we deduce
where \(a=t_{i_{j}}-t_{i_{j-1}}+\cdots \pm t_{i_{1}}\), \(i<i_{1}<i_{2}<\cdots <i_{j}\le k\). Therefore, using (40) and Lemma 2.5, for \(s\in (t_{i},t_{i+1}]\), \(i\in \mathbb {N}\), we find
Therefore, using (38), (40) and (41), we have
where
Multiply both sides of (42) by \(e^{-\theta t}\), and we find
Using Bellman’s inequality, we have
hence,
It follows from condition (36) that one can choose \(\varepsilon \) small enough such that
Then, (43) implies
Since
where \(a=t_{i_{j}}-t_{i_{j-1}}+\cdots \pm t_{i_{1}}\), \(i<i_{1}<i_{2}<\cdots <i_{j}\le k\), using a similar method used in the process of (44), we also can show that
we omit the details. It follows from (44), (46) that the solution of (5) is exponentially stable. \(\square \)
5 Existence, Uniqueness and Ulam–Hyers–Rassias Stability of Solutions for Nonlinear Problem
In this section, we study the existence, uniqueness and Ulam–Hyers–Rassias stability of solutions for second order semilinear impulsive differential equations
where A, \(B_{1}\), \(B_{2}\), \(t_{i}\) are as in (4) and \(f:J'\times \mathbb {R}^{n}\rightarrow \mathbb {R}^{n}\) is continuous, \(J=[0,+\infty )\). In addition, we assume the impulsive points fulfill
Let \(PC(I,\mathbb {R}^{n})\) denote the Banach space of piecewise continuous on interval I, that is \(PC(I,\mathbb {R}^{n})=\{u:I\rightarrow \mathbb {R}^{n}|u\in C((t_{k-1},t_{k}],\mathbb {R}^{n})\) for \(k\in \mathbb {N}\) and there exists \(u(t_{k}^{-})\) and \(u(t_{k}^{+}), k\in \mathbb {N}\) with \(u(t_{k})=u(t_{k}^{-}) \}\) equipped with the Chebyshev PC-norm \(||u||_{PC}:=\sup \{||u(t)||:t\in I\}\), \(PCB(I,\mathbb {R}^{n})\) is the Banach space of all bounded functions in \(PC(I,\mathbb {R}^{n})\) equipped with the Bielecki PCB-norm \(||u||_{PCB}:=\sup \{||u(t)||e^{-\omega t}:t\in I\}\) for some \(\omega \in \mathbb {R}\).
Consider the following second order linear nonhomogeneous initial value problem
where A, \(B_{1}\), \(B_{2}\), \(t_{i}\) are as in (4), and \(f:J\rightarrow \mathbb {R}^{n}\) is continuous, \(g_{1},g_{2},\cdots ,g_{m}\) is a number sequence.
Theorem 5.1
If \(t\in (t_{k},t_{k+1}] \), then the solutions u(t) of linear impulsive differential equations (47) is given as follows:
where \(W(A,t,u_{0},u_{1})\), \(W_{i}(A,t,s)\) is given in (33) and
Proof
The proof is essentially similar to that of Theorem 4.1, so we omit it. \(\square \)
We list for convenience the following assumption.
(H) \(f\in C(J\times \mathbb {R}^{n},\mathbb {R}^{n})\) and there exists a constant \(L_{f}>0\) such that
for all \(t\in J\) and \(y_{1},y_{2}\in \mathbb {R}^{n}\). Moreover \(||f||_{\infty }:=\max _{t\in J} ||f(t,0)||<\infty \).
Theorem 5.2
Suppose that (H), (19) hold, and for any fixed \(0<\varepsilon \le 1\) used in Lemma 2.5, \(L_{f}\) satisfies
Then (6) has a unique solution \(u\in PCB(J,\mathbb {R}^{n})\) and \(\omega =\sqrt{\rho (A)+1}\).
Proof
For all \(t\in (t_{k},t_{k+1}]\), we define the mapping \(S:PC(J,\mathbb {R}^n)\rightarrow PC(J,\mathbb {R}^n)\) by
Clearly, \(S:PC(J,\mathbb {R}^n)\rightarrow PC(J,\mathbb {R}^n)\) is continuous. From Theorem 4.1, the solution of (6) is equivalent to the fixed point of S.
For any \(u,\overline{u} \in PCB(J,\mathbb {R}^{n})\) and \(t\in (t_{k},t_{k+1}]\), according to condition (H) and (41), we have
Thus,
From (49), \(S:PCB(J,\mathbb {R}^{n})\rightarrow PC(J,\mathbb {R}^{n})\) is a contraction mapping. Also, we have
which implies
Thus
From Lemma 2.4, \(S:PCB(J,\mathbb {R})\rightarrow PCB(J,\mathbb {R})\) has a unique fixed point, which is the solution of system (6). \(\square \)
Let \(\varepsilon ^{*}>0\), \(\psi >0\) and \(\varphi (t)\in PC(J,\mathbb {R}_{+})\) be a nondecreasing function. We consider the following inequalities:
and we take the vector space
Definition 5.1
The equation (6) is Ulam–Hyers–Rassias stable with respect to \((\varphi ,\psi )\), if there exists constants c, \(\overline{c}>0\) such that for each function \(\hat{v}\in X\) satisfying (50), there exists a solution \(v\in X\) of (6) with
Remark 5.1
A function \(\hat{v}\in X\) is a solution of (50) if and only if there is \(G\in X\), and a sequence \(g_{i}\), \(i\in \mathbb {N},\) such that:
(a) \(||G(t)||\le \varepsilon ^{*}(\rho (A_{1})+\rho (A_{2})+2\varepsilon )^{i} \varphi (t)\), \(t\in (t_{i},t_{i+1}]\), \(i\in \mathbb {N}\),
\(||g_{i}||\le \varepsilon ^{*}(\rho (A_{1})+\rho (A_{2})+2\varepsilon )^{i}\psi \), \(t\in (t_{i},t_{i+1}]\), \(i\in \mathbb {N}\);
(b) \(\hat{v}''(t)=A\hat{v}(t)+f(t,\hat{v}(t))+G(t)\), \(t\in (t_{i},t_{i+1}]\), \(i\in \mathbb {N}\);
(c) \(\Delta \hat{v}(t_{i})=B_{1}\hat{v}(t_{i}^{-})+g_{i}\), \(i\in \mathbb {N}\);
(d) \(\Delta \hat{v}'(t_{i})=B_{2}\hat{v}'(t_{i}^{-})+g_{i}\), \(i\in \mathbb {N}\).
Theorem 5.3
Assume that all the assumptions in Th 5.2 hold (so the solution of (6) is unique), and there exists a constant \(\tau >0\) such that
and p is as in (16) and \(L_{f}\) satisfies
Then the equation (6) is Ulam–Hyers–Rassias stable with respect to \((\varphi ,\psi )\).
Proof
Let \(\hat{v}\in X\) be a solution of (50), and from Remark 5, \(\hat{v}(t)\) satisfies the following impulsive differential equation
here G(t) and \(g_{i}\) satisfy
Using Theorem 5.1 we have
From (40) and (45), for any \(t\ge 0\), we have
where \(a=t_{i_{j}}-t_{i_{j-1}}+\cdots \pm t_{i_{1}}\), \(i<i_{1}<i_{2}<\cdots <i_{j}\le k\). Hence, using (58), (59), for any \(t\in (t_{k},t_{k+1}]\), we have
Let u(t) be the unique solution of (6) (see Theorem 5.2). Then using Lemma 2.7, (40), (41), (53), (56), (57) and (60), for all \(t\in (t_{k},t_{k+1}]\), we have
here \(\lambda \) is the minimum length of the interval, i.e. \(\lambda =\inf \{t_{i+1}-t_{i}|i\in \mathbb {N}\}\). Multiply both sides of (61) by \(e^{-\sqrt{\rho (A)+\varepsilon }t}\) and we find
Since \(\varphi \in PC(J,\mathbb {R}_{+})\) is a nondecreasing function, using Bellman’s inequality, we have
which implies
Making use of (19), there exists \(T>0\), such that
for any \(t>T\). In addition, according to (54), one can choose \(\varepsilon >0\) small enough such that
Therefore, we have
for any \(t>T\) and \(t\in (t_{k},t_{k+1}]\).
In the case of \(t\le T\) and \(t\in (t_{k},t_{k+1}]\), from (62), we have
Hence, (51) holds for
Similarly, for any \(t\in (t_{k},t_{k+1}]\), we also have
hence, making use of (56), (57) and (64), we have
Multiply both sides by \(e^{-\sqrt{\rho (A)+\varepsilon }t}\) and we have
hence, by Lemma 2.6 we have
so
Note
and
Therefore, from (54), we can choose \(\varepsilon >0\) small enough such that
for any \(t>T\) large enough. Therefore, using the same method as in the previous proof, we have
which implies (52) holds for
Hence, system (6) is Ulam–Hyers–Rassias stable with respect to \((\varphi ,\psi )\). \(\square \)
Example 5.1
Consider the second order impulsive differential equation (6) with \(f(t,u(t))=\frac{\sqrt{2}}{2}\sin u(t)\), \(t_{i}=i\), \(i=0,1,2,\cdots \) and
and the initial value
Define
Let \(\mathbb {R}^{m\times n}\) be the usual matrix space with the norm \(||A||=\max \limits _{j}\sum _{i=1}^{m}|a_{i,j}|\), and set \(\varepsilon =1\) in Lemma 2.5, then we can pick \(T_{A,\varepsilon }=T_{A_{1},\varepsilon }=T_{A_{2},\varepsilon }=1\). Note
for all \(u, v\in \mathbb {R}^{N}\). Thus conditions (19) and (49) hold, and (H) is fulfilled for \(L_{f}=\frac{\sqrt{2}}{2}\). Hence, (6) has a unique solution \(u\in PCB(J,\mathbb {R}^{n})\) with \(\omega =\sqrt{3}\). Furthermore, let \(\varphi (t)=e^{t}\), \(\psi =1\), and \(\tau =1\), and v(t) be a solution of (50). Then
Then all the assumptions of Theorem 5.3 is fulfilled, and therefore equation (6) is Ulam–Hyers–Rassias stable with respect to \((e^{t},1)\).
References
Milman, V.D., Myshkis, A.D.: On the stability of motion in the presence of impulses. Sib. Math. J. 1, 233–237 (1960). ((in Russian))
Bainov, D.D., Simeonov, P.S.: Impulsive Differential Equation: Periodic Solutions and Applications. Longman Scientific & Technical, Harlow (1993)
Bainov, D.D., Simeonov, P.S.: Oscillation Theory of Impulsive Differential Equations. International Publications, Orlando (1998)
Bainov, D.D., Simeonov, P.S.: Theory of Impulsive Differential Equations. Series on Advances in Mathematics for Applied Sciences, vol. 28. World Scientific, Singapore (1995)
Samoilenko, A.M., Perestyuk, N.A.: Impulsive Differential Equations. World Scientific, Sigapore (1995)
Benchohra, M., Henderson, J., Ntouyas, S.K.: Impulsive Differential Equations and Inclusions. Hindawi Publishing Corporation, Cairo (2006)
Lakshmikantham, V., Bainov, D.D., Simeonov, P.S.: Theory of Impulsive Differential Equations, Series in Mordern Applied Mathematics, vol. 6. World Scientific, Sigapore (1989)
Hopfield, J.J., Tank, D.T.: Comptuation with neural circuits: a model. Science 233, 3088–3092 (1986)
Zada, A., Shah, O., Shah, R.: Hyers-Ulam stability of non-autonomous systems in terms of boundedness of Cauchy problems. Appl. Math. Comput. 271, 512–518 (2015)
Barbu, D., Buşe, C., Tabassum, A.: Hyers-Ulam stability and discrete dichotomy. J. Math. Anal. Appl. 42, 1738–1752 (2015)
Shah, S.O., Zada, A., Muzammil, M., Tayyab, M., Rizwan, R.: On the Bielecki-Ulams type stability results of first order non-linear impulsive delay dynamic systems on time scales. Qual. Theory Dyn. Syst. 19, 1–18 (2020)
Shah, S.O., Zada, A., Tunc, C., Asad, A.: Bielecki-Ulam-Hyers stability of non-linear Volterra impulsive integro-delay dynamic systems on time scales, Punjab University. J. Math. 53, 339–349 (2021)
Zada, A., Shah, S.O.: Hyers-Ulam stability of first-order non-linear delay differential equations with fractional integrable impulses. Hacettepe J. Math. Stat. 47, 1196–1205 (2018)
Bainov, D.D., Simeonov, P.S.: Systems with Impulsive Effect Stability, Theory and Applications. Ellis Horwood Series in Mathematics and its Applications, Ellis Horwood, Chichester (1989)
Bainov, D.D., Simeonov, P.S.: Impulsive Differential Equations: Periodic Solutions and Applications. Longman Scientific & Technical, New York (1993)
Ulam, S.M.: A Collection of the Mathematical Problems. Interscience, New York (1960)
Hyers, D.H.: On the stability of the linear functional equation. Proc. Natl. Acad. Sci. USA 27, 222–224 (1941)
Rassias, Th.M.: On the stability of linear mapping in Banach spaces. Proc. Am. Math. Soc. 72, 297–300 (1978)
Wang, J., Fečkan, M., Tian, Y.: Stability Analysis for a general class of non-instantaneous impulsive differential equations. Mediterr. J. Math. 14, 1–21 (2017)
Malik, M., Avadhesh, K., Fečkan, M.: Existence, uniqueness and stability of solutions to second order nonlinear differential equations with non-instantaneous impulses, Journal of King Saud University. Science 30, 204–213 (2018)
Wang, J., Fečkan, M.: A general class of impulsive evolution equations. Topol. Methods Nonlinear Anal. 46, 915–933 (2015)
Wang, J., Fečkan, M., Zhou, Y.: Ulam’s type stability of impulsive ordinary differential equations. J. Math. Anal. Appl. 395, 258–264 (2012)
Shah, S.O., Zada, A., Hamza, A.E.: Stability analysis of the first order non-linear impulsive time varying delay dynamic system on time scales. Qual. Theory Dyn. Syst. 18, 825–840 (2019)
Găvruţă, P., Jung, S.M., Li, Y.J.: Hyers-Ulam stability for second-order linear differential equations with boundary conditions. Electron. J. Differ. Equ. 2011, 1–5 (2011)
Mohanapriya, A., Ganesh, A., Gunasekaran, N.: The Fourier transform approach to Hyers-Ulam stability of differential equation of second order. J. Phys. Conf. Ser. (1597)
Jung, S.M.: Hyers-Ulam stability of linear differential equations of first order. Appl. Math. Lett. 17, 1135–1140 (2004)
Li, T., Zada, A.: Connections between Hyers-Ulam stability and uniform exponential stability of discrete evolution families of bounded linear operators over Banach spaces. Adv. Differ. Equ. 2016, 1–8 (2016)
Jung, S.M.: Hyers-Ulam stability of linear differential equations of first order (II). Appl. Math. Lett. 19, 854–858 (2006)
Jung, S.M.: Hyers-Ulam stability of linear differential equations of first order (III). J. Math. Anal. Appl. 311, 139–146 (2005)
Shah, S.O., Zada, A.: On the stability analysis of non-linear Hammerstein impulsive integro-dynamic system on time scales with delay, Punjab University. J. Math. 51, 89–98 (2019)
Shah, S.O., Zada, A.: Existence, uniqueness and stability of solution to mixed integral dynamic systems with instantaneous and noninstantaneous impulses on time scales. Appl. Math. Comput. 359, 202–213 (2019)
Fattorini, H.O.: Second Order Linear Differential Equations in Banach Spaces. North Holland Mathematics Studies, vol. 108. Elsevier Science, North Holland (1985)
Hille, E., Phillips, R.S.: Functional analysis and semi-groups. Series in Colloquium Publications Amer. Mathematical Society American Mathematical Society, Rhode Island (1996)
Hartman, Ph.: Ordinary Differential Equations. John Wiley & Sons, New York (1964)
Pachpatte, B.G.: Inequalities for Differential and Integral Equations. Academic Press, San Diego (1998)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is partially supported by the National Natural Science Foundation of China (12161015), Training Object of High Level and Innovative Talents of Guizhou Province ((2016)4006), Major Research Project of Innovative Group in Guizhou Education Department ([2018]012), Guizhou Data Driven Modeling Learning and Optimization Innovation Team ([2020]5016)
Rights and permissions
About this article

Cite this article
Wen, Q., Wang, J. & O’Regan, D. Stability Analysis of Second Order Impulsive Differential Equations. Qual. Theory Dyn. Syst. 21, 54 (2022). https://doi.org/10.1007/s12346-022-00587-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-022-00587-w
Keywords
- Second order
- Impulsive differential equations
- Representation
- Asymptotical stability
- Ulam–Hyers–Rissais stability