
Abstract
This paper is concerned with asymptotical stability of a class of semi-linear impulsive ordinary differential equations. First of all, sufficient conditions for asymptotical stability of the exact solutions of semi-linear impulsive differential equations are provided. Under the sufficient conditions, some explicit exponential Runge–Kutta methods can preserve asymptotically stability without additional restriction on stepsizes. Moreover, it is proved that some explicit Runge–Kutta methods can preserve asymptotical stability without additional restriction on stepsizes under stronger conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The impulsive differential equations (IDEs) are widely applied in numerous fields of science and technology. Recently, the theory of IDEs has been an object of active research. Especially, the exact solutions of semi-linear IDEs have been widely studied (see Abada et al. 2009; Benchohra et al. 2006; Cardinali and Rubbioni 2008; Fan 2010; Friedli 1978; Fan and Li 2010; Liang et al. 2009). However, many IDEs cannot be solved analytically or their solving is more complicated. Hence, taking numerical methods is a good choice.
In recent years, the stability of numerical methods for IDEs has attracted more and more attention (see Liu et al. 2007, 2014; Liang et al. 2011; Ran et al. 2008; Wen and Yu 2011; Zhang and Liang 2014 etc). Stability of Runge–Kutta (RK) methods with the constant stepsize for scalar linear IDEs has been studied by Ran et al. (2008). RK methods with variable stepsizes for multidimensional linear IDEs have been investigated in Liu et al. (2007). Collocation methods for linear nonautonomous IDEs has been considered in Zhang and Liang (2014). An improved linear multistep method for linear IDEs has been investigated in Liu et al. (2012). Stability of the exact and numerical solutions of nonlinear IDEs has been studied by the Lyapunov method in Liang et al. (2011). Stability of RK methods for a special kind of nonlinear IDEs has been investigated by the properties of the differential equations without impulsive perturbations in Liu et al. (2014). Asymptotic stability of implicit Euler method for stiff IDEs in Banach space has been studied in Wen and Yu (2011). There are a lot of meaningful work on the numerical solution of impulsive differential equations, for example Ding et al. (2006, 2010), Liang et al. (2014), Liu and Zeng (2018), Wu et al. (2010), Wu and Ding (2012a, b) and Wu et al. (2019a, b). But, up to our knowledge, the numerical methods for impulsive semi-linear ordinary differential equations are still a blank field.
Exponential RK methods are widely applied to semi-linear ordinary differential equations without impulsive perturbations have been widely studied (see Calvo et al. 2000; Lawson 1967; Maset and Zennaro 2009; Ostermann and Daele 2007; Ostermann et al. 2006). Now the exponential RK methods are applied to the following equation:
where \(L\in {\mathbb {R}}^{d\times d}\), \(f:(t_0,+\infty )\times \mathbb { R}^d\rightarrow {\mathbb {R}}^d\), \(I_k:{\mathbb {R}}^d\rightarrow {\mathbb {R}}^d\), \({\mathbb {Z}}^+=\{1,2,\ldots \}\) and \(\tau _k\) is a positive real constant and \(\tau _k<\tau _{k+1}\) for arbitrary \(k\in {\mathbb {Z}}^+\).
Outline of the rest of the paper is provided as follows. In Sect. 2, sufficient conditions for asymptotical stability of the exact solution of (1.1) are provided.
In Sect. 3, explicit Euler method, implicit Euler method and explicit exponential Euler are applied for two semi-linear IDEs to explore the stability of numerical methods. From the two numerical examples, the following two key questions which will be worked out in this article are presented. Are there some exponential RK methods which can preserve asymptotical stability of (1.1) without additional restrictions on stepsizes under the sufficient conditions which are provided in Sect. 2? Are there some RK methods which can preserve asymptotical stability of (1.1) without additional restrictions on stepsizes under stronger sufficient conditions?
In Sect. 4, it is proved that a class of explicit exponential RK methods can preserve asymptotical stability semi-linear IDEs without restriction on the stepsizes except that \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\), under the sufficient conditions which are provided in Sect. 2.
In Sect. 5, stronger sufficient conditions for asymptotical stability of the exact solution of (1.1) are provided first. Under these stronger sufficient conditions, asymptotical stability of RK methods for (1.1) is studied.
In Sect. 6, some conclusions are drafted.
2 Stability of IDEs
Assume that y(t) is the solution of the following equation:
and the functions f and \(I_k\) satisfy the following properties, respectively:
Definition 2.1
(Bainov and Simeonov 1989; Samoilenko et al. 1995) The exact solution x(t) of (1.1) is said to be
- 1.
Stable if, for an arbitrary \(\epsilon >0\), there exists a positive number \(\delta =\delta (\epsilon )\) such that, for the solution y(t) of (2.1), \(\Vert x_0-y_0\Vert <\delta \) implies
$$\begin{aligned} \Vert x(t)-y(t)\Vert <\epsilon ,\;\forall \;t>t_0; \end{aligned}$$ - 2.
Asymptotically stable, if it is stable and \( \lim \limits _{t\rightarrow \infty }\Vert x(t)-y(t)\Vert =0. \)
Theorem 2.2
Assume that there exists a positive constant \({\hat{C}}\) such that \(\tau _{k}-\tau _{k-1}\le {\hat{C}}\), \(k\in {\mathbb {Z}}^+\). The exact solution of (1.1) is asymptotically stable if there is a positive constant C such that
for arbitrary \(k\in {\mathbb {Z}}^+\).
Proof
Define \(\delta (t)=\Vert x(t)-y(t)\Vert ^2\). Obviously, we have
Since x(t) and y(t) are left continuous, we get
that is
which implies
According to mathematical induction, we can get that, for \(\forall \;t\in (\tau _k,\tau _{k+1}]\),
where \({\hat{C}}_1=\max \{1,\mathrm{e}^{(\mu (L)+\lambda ){\hat{C}}}\}\). Hence, for an arbitrary \(\epsilon >0\), there exists \(\delta =\frac{\epsilon }{{\hat{C}}_1}\) such that \(\Vert x_0-y_0\Vert <\delta \) implies
for arbitrary \(t\in (\tau _{k}, \tau _{k+1}]\), \(k=0,1,2,\ldots \). And at the moments of impulsive effect \(t=\tau _{k+1}, k=0,1,2,\ldots \), we can also obtain that
and
Therefore, the exact solution of (1.1) is stable. Obviously, for arbitrary \(t\in (\tau _{k}, \tau _{k+1}]\), \(k=0,1,2,\ldots \),
At the moments of impulsive effect \(t=\tau _{k+1}, k=0,1,2,\ldots \), we can also obtain that
and
Consequently, the exact solutions of (1.1) is asymptotically stable under the condition (2.4). \(\square \)
3 Two numerical examples
In this section, explicit Euler method, implicit Euler method and explicit exponential Euler are applied to semi-linear IDEs to explore the stability of numerical methods.
Example 3.1
Consider one-dimension semi-linear IDE:
and the same equation with another initial value
where \(x_0\) and \(y_0\) are real constants and \(x_0\ne y_0\). By Theorem 2.2, we can obtain that the exact solution of (3.1) is asymptotically stable.
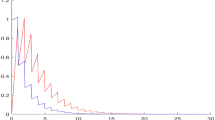
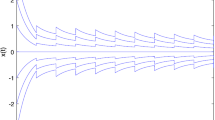
Figures 1, 2 and 3 are the numerical solutions and the absolute value of these errors between two different numerical solutions, which are obtained from explicit Euler method, implicit Euler method and explicit exponential Euler, respectively, when \(x_0=1\), \(y_0=2\), \(h_k= h=\frac{1}{2}\), \(k\in {\mathbb {N}}\).
First of all, we claim that the absolute value of these errors between two different numerical solutions obtained from explicit Euler method for (3.1) and (3.2) tend to infinite when the stepsize \(h=\frac{1}{2}\) (see Fig. 1).



To prove this, let us consider the explicit Euler method for (3.1):
and explicit Euler method for (3.2):
where \(h=\frac{1}{m}\), \(m\in {\mathbb {Z}}^+\), \(x_{k,l}\) is an approximation to the exact solution \(x(k+lh)\) and \(x_{k,m}\) is an approximation to \(x(k+1^-)\), \(k\in {\mathbb {N}}, l=0,1,\ldots ,m-1\).
Obviously, when \(h=\frac{1}{2}\), we can obtain that, for \(l=0,1\),
which implies that, for any \(l=0,1,2\),
Second, we claim that the absolute value of these errors between two different numerical solutions, which are obtained from implicit Euler method for (3.1) and (3.2), tend to infinite when \(h=\frac{1}{2}\) (see Fig. 1).
To prove this, let us consider implicit Euler method for (3.1)
and implicit Euler method for (3.2)
Obviously, when \(h=\frac{1}{2}\), we can obtain that
which implies that
Hence, for any \(l=0,1,2\),
It is different from the above two cases, we can easily prove that exponential explicit Euler method (see Fig. 3) for (3.1) is asymptotically stable for arbitrary \(h=\frac{1}{m}\), \(\forall m\in {\mathbb {Z}}^+\). By Corollary 4.4 of this paper, we also can obtain this point.
Example 3.2
Consider one-dimension semi-linear IDE:
and the same equation with another initial value
where \(x_0\) and \(y_0\) are real constants and \(x_0\ne y_0\) . By Theorem 2.2, we can obtain that the exact solution of (3.7) is asymptotically stable.
Figures 4, 5 and 6 are the numerical solutions and the absolute value of these errors between two different numerical solutions, which are obtained from explicit Euler method, implicit Euler method and explicit exponential Euler, respectively, when \(x_0=1\), \(y_0=2\), \(h=\frac{1}{5}\).



We claim that the absolute value of these errors between two different numerical solutions obtained from implicit Euler method for (3.7) and (3.8) tend to infinite when \(h=\frac{1}{5}\).
To prove this, let us consider implicit Euler method for (3.7)
and implicit Euler method for (3.8)
Obviously, when \(h=\frac{1}{5}\), we can obtain that
which implies that
Hence, for any \(l=0,1,2\),
On the other hand, it is easy to prove that both explicit Euler method (see Fig. 4) and exponential explicit Euler method (see Fig. 6) for (3.7) are asymptotically stable for arbitrary \(h=\frac{1}{m}\), \(\forall m\in {\mathbb {Z}}^+\). This point can also be obtained by Corollary 4.4 and Theorem 5.2 of this paper.
From Examples 3.1 and 3.2, we can see that explicit exponential Euler method can preserve asymptotically stability of the exact solutions of (3.1) and (3.7) for arbitrary \(h=\frac{1}{m},\; m\in {\mathbb {Z}}^+\), but Runge–Kutta methods sometimes cannot preserve asymptotically stability without additional restriction on stepsizes. Naturally, the following two questions arise. Are there some exponential RK methods which can preserve asymptotical stability of (1.1) under the conditions of Theorem 2.2 without restrictions on stepsizes except that \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(m\in {\mathbb {Z}}^+\), \(k\in {\mathbb {N}}\) ? Are there some RK methods which can preserve asymptotical stability of (1.1) without restrictions on stepsizes except that \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(m\in {\mathbb {Z}}^+\), \(k\in {\mathbb {N}}\), under stronger conditions?
4 Stability of exponential RK methods
In this section, exponential RK methods for (1.1) can be constructed as follows:
where \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(t_{k,l}=\tau _{k}+l h_k\), \(t_{k,l}^i=t_{k,l}+c_ih_k\), \(x_{k,l}\) is an approximation to the exact solution \(x(t_{k,l})\), \(x_{k,m}\) is an approximation to \(x(\tau _{k+1}^-)\) and \(X_{k,l}^i\) is an approximation to the exact solution \(x(t_{k,l}^i)\), \(k\in {\mathbb {N}}=\{0,1,2,\ldots \}, l=0,1,\ldots ,m-1, i=1,2,\ldots ,v\), v is referred to as the number of stages. The weights \(b_i\), the abscissae \(c_i=\sum \nolimits _{j=1}^v a_{ij}\) and the matrix \(A=[a_{ij}]_{i,j=1}^s\) are denoted by (A, b, c). Now we introduce, for constant \(\alpha \) (may be nonnegative), the \(1\times v\)-vector \(\mathbf{b }(\alpha )\) of components
and the \(v\times v\)-vector \(\mathbf{A }(\alpha )\) whose elements are
And the exponential RK methods for (2.1):
Definition 4.1
The exponential RK methods (4.1) (or RK methods ) for impulsive differential equation (1.1) is said to be
- 1.
stable, if \(\exists M>0\), \(m\ge M\), \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\),
- (i)
\(I-zA\) is invertible for all \(z=\alpha h_k\),
- (ii)
for an arbitrary \(\epsilon >0\), there exists such a positive number \(\delta =\delta (\epsilon )\) that, for the numerical solutions of (4.2), \(\Vert x_0-y_0\Vert <\delta \) implies
$$\begin{aligned} \max _{1\le l\le m}\Vert x_{k,l}-y_{k,l}\Vert <\epsilon ,\;\forall \; k\in {\mathbb {N}}, \end{aligned}$$
- (i)
- 2.
asymptotically stable, if it is stable and if there exists such a positive number \(\delta _0\) that \(\Vert x_0-y_0\Vert <\delta _1\) implies
$$\begin{aligned} \lim \limits _{k\rightarrow \infty }\max _{1\le l\le m}\Vert x_{k,l}-y_{k,l}\Vert =0. \end{aligned}$$
Theorem 4.2
(Asymptotically stable) If the explicit exponential RK method (4.1) satisfies \( {\mathbf {S}}(\alpha ,\beta )\le \mathrm{e}^{\alpha +\beta }\), where
then the explicit exponential RK method (4.1) for (1.1) is asymptotically stable, for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\).
Proof
Define
Hence, we have
which imply that
where \(\lambda \) and \(\gamma _k\) are the Lipschitz constants of f and \(I_k\), respectively, \(\Delta _{k,l}\) is the \(v\times 1\)-vector of components \(\Vert \Delta _{k,l}^i\Vert ,\;i=1,2,\ldots ,v\). Since the function \({\mathbf {b}}_i\) and \({\mathbf {a}}_{ij},i,j=1,2,\ldots v\), are nondecreasing, we can obtain that
where \(\mathbf{S }(\alpha ,\beta )=\mathrm{e}^\alpha +\sum _{k=0}^{v-1}\beta ^{k+1}\mathbf{b }^\mathrm{T}(\alpha )\mathbf{A }(\alpha )^{k}\mathrm{e}^{c\alpha }e,\;\alpha \in {\mathbb {R}},\beta \ge 0.\)
Hence, for arbitrary \(k=0,1,2,\ldots \) and \(l=0,1,\ldots ,m\), we have
Therefore, by the method of introduction and the condition (5.1), we can obtain that
which implies that the exponential RK method for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\) and \(m\ge M\). \(\square \)
Along with the function \({\mathbf {S}}\), we consider also the function
Therefore, by Theorem 4.2, we immediately get the following corollary.
Corollary 4.3
If the explicit exponential RK method (4.1) satisfies
and
then the explicit exponential RK method (4.1) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\).
For an IF method with an explicit underlying RK method (A, b, c), we have
Condition (4.3) holds if
where \({\mathbf {k}}=\min \{k: k\in {\mathbb {N}}, b^\mathrm{T}A^ke\ne \frac{1}{(k+1)!}\}\). On the other hand, the condition (4.4) holds if
and
Hence, by Corollary 4.3, we can obtain the following corollary.
Corollary 4.4
If the explicit exponential RK method (4.1) is IF method satisfies (4.5), (4.6) and
where \({\mathbf {k}}=\min \{k\in \{0,1,2,\ldots \}|\; b^\mathrm{T}A^ke\ne \frac{1}{(k+1)!}\}\), then the explicit exponential RK method (4.1) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\).
5 Stability of RK methods
In this section, stronger sufficient conditions for asymptotical stability of the exact solution of (1.1) are provided. Moreover, asymptotical stability of RK methods for (1.1) is studied under these conditions.
Since \(\mu (L)\le \Vert L\Vert \), by Theorem 2.2, we can obtain the following corollary.
Corollary 5.1
Assume that there exists a positive constant \({\hat{C}}\) such that \(\tau _{k}-\tau _{k-1}\le {\hat{C}}\), \(k\in {\mathbb {Z}}^+\). The exact solution of (1.1) is asymptotically stable if there is a positive constant C such that
for arbitrary \(k\in {\mathbb {Z}}^+\).
5.1 Explicit RK method
Consider the explicit Euler method for (1.1):
Theorem 5.2
Under the conditions of Corollary 5.1, the explicit Euler method (5.2) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\).
Proof
For arbitrary \(k=0,1,2,\ldots \) and \(l=0,1,\ldots ,m-1\), we can obtain
Hence, for arbitrary \(k=0,1,2,\ldots \) and \(l=0,1,\ldots ,m\), we have
Consequently, by the method of introduction and the condition (5.1), we can obtain that
which implies that the explicit Euler method (5.2) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\). \(\square \)
The two-stage explicit Runge–Kutta methods have a Butcher tableau
For brevity, the proofs of the following two theorems are omitted.
Theorem 5.3
Assume that all the coefficients of two-stage explicit Runge–Kutta methods are nonnegative, that is \(a_{21}\ge 0\), \(b_1\ge 0\) and \(b_2\ge 0\), and
Then the 2-stage explicit Runge–Kutta method for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\), under the conditions of Corollary 5.1.
The following two-stage second-order explicit Runge–Kutta methods all satisfy the conditions of Theorem 5.3.
The three-stage explicit Runge–Kutta methods have a Butcher tableau
Theorem 5.4
Under the conditions of Corollary 5.1 and all the coefficients of explicit Runge–Kutta methods are nonnegative (\(a_{ij}\ge 0\) and \(b_i\ge 0\), \(1\le i,j\le 3\)), the three-stage third-order explicit Runge–Kutta methods for (1.1) are asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\).
The following three-stage third-order explicit Runge–Kutta methods all satisfy the conditions of Theorem 5.4.
Consider the explicit four-stage RK methods for (1.1):
Theorem 5.5
Assume that all the coefficients of explicit Runge–Kutta method (5.3) are nonnegative (\(a_{ij}\ge 0\) and \(b_i\ge 0\), \(1\le i, j \le 4\)) and
Then, under the conditions Corollary 5.1, the four-stage explicit Runge–Kutta method (5.3) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\).
Proof
Obviously, for arbitrary \(k=0,1,2,\ldots \) and \(l=0,1,\ldots ,m-1\),
Due to the condition (5.1), \(a_{21}\ge 0\) and \(c_2=a_{21}\), we have
Similarly, we can obtain that
and
By the conditions (5.4)–(5.7), the equality (5.8) and the above three inequalities, we can obtain
Consequently, the four-stage explicit Runge–Kutta method (5.3) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\). \(\square \)
Obviously, all the four-stage fourth-order explicit Runge–Kutta methods satisfy conditions (5.4)–(5.7) (see (Butcher 2003, p. 90) or (Hairer et al. 1993b, pp. 135–136)). Consequently, by Theorem 5.5, we immediately obtain the following corollary.
Corollary 5.6
Assume that all the coefficients of explicit Runge–Kutta method (5.3) are nonnegative (\(a_{ij}\ge 0\) and \(b_i\ge 0\), \(1\le i, j \le 4\)). Then, under the conditions Corollary 5.1, the four-stage fourth-order explicit Runge–Kutta method (5.3) for (1.1) is stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \(\forall m\in {\mathbb {Z}}^+\).
The four-stage explicit Runge–Kutta methods have a Butcher tableau
The following classical four-stage fourth-order explicit Runge–Kutta method satisfies the conditions of Theorem 5.5 and Corollary 5.6.
Remark 5.7
In fact, there are many four-stage explicit Runge–Kutta methods which are not of order 4 , but they satisfy conditions (5.4)–(5.7). The following method is an example which is not of order 4, however, it satisfies not only conditions (5.4)–(5.7), but also the conditions of Theorem 5.5.
Unfortunately, we can not obtain the p-stage explicit Runge–Kutta methods of order p for \(p\ge 5\), because of the Butcher Barriers as follows.
Theorem 5.8
(See Butcher 2003, Theorem 370, pp. 258–259) or (Hairer et al. 1993b, Theorem 5.1 p. 173) For \(p\ge 5\), no explicit Runge–Kutta methods exist of order p with \(s=p\) stages.
5.2 RK methods
Consider the following RK methods for (1.1):
Lemma 5.9
(Butcher 1987; Dekker and Verwer 1984; Hairer et al. 1993b; Wanner et al. 1978) The \((\mathbf{j },\mathbf{k })\)-Padé approximation to \(\mathrm{e}^z\) is given by
where
with error
It is the unique rational approximation to \(\mathrm{e}^z\) of order \(\mathbf{j }+\mathbf{k }\), such that the degrees of numerator and denominator are \(\mathbf{j }\) and \(\mathbf{k }\), respectively.
Lemma 5.10
(Song et al. 2005; Yang et al. 2005; Wang and Qiu 2014) Assume that \(\mathbf{R }(z)\) is the \((\mathbf{j },\mathbf{k })\)-Padé approximation to \(\mathrm{e}^z\). Then \(\mathbf{R }(z)<\mathrm{e}^{z}\) for all \(z>0\) if and only if \(\mathbf{k }\) is even, when \(z>0\).
Theorem 5.11
Assume that \(\mathbf{R }(z)\) is the stability function of Runge–Kutta method (5.9) i.e.
Under the conditions of Corollary 5.1, Runge–Kutta method (4.1) with nonnegative coefficients (\(a_{ij}\ge 0\) and \(b_i\ge 0\), \(1\le i\le v\), \(1\le j\le v\)) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\) and \(m\ge M\), if \(\mathbf{k }\) is even, where \(M=\inf \{m: I-zA \;is\; invertible\; and\; (I-z_kA)^{-1}e\ge 0, z_k=(\Vert L\Vert +\lambda ) h_k, k\in {\mathbb {N}}, m\in {\mathbb {Z}}^+\}\).
Proof
Since \(a_{ij}\ge 0\) and \(b_i\ge 0\),\(1\le i\le s\), \(1\le j\le v\), we can obtain that
And when \(m\ge M\), \((I-z_kA)^{-1}e\ge 0, z_k=(\Vert L\Vert +\lambda ) h_k, k\in {\mathbb {Z}}^+\), so
where \([\Vert \Delta _{k,l}^i\Vert ]=(\Vert \Delta _{k,l}^1\Vert ,\Vert \Delta _{k,l}^2\Vert ,\ldots , \Vert \Delta _{k,l}^v\Vert )^\mathrm{T}\). By Lemmas 5.9 and 5.10, we can obtain
Therefore, RK method (5.9) for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\) and \(m\ge M\). \(\square \)
5.3 \(\theta \)-methods
Consider \(\theta \)-methods for (1.1):
where \(h_k=\frac{\tau _{k+1}-\tau _k}{m},\;\; m\ge 1,\; m\) is an integer, \(k=0,1,2,\ldots \).
Lemma 5.12
(See Song et al. 2005) For \(m>\Vert L\Vert +\lambda \) and \(z_k=h_k(\Vert L\Vert +\lambda ),\;h=\frac{\tau _k-\tau _{k-1}}{m},\;m\in {\mathbb {Z}}^+\),\(k\in {\mathbb {N}}\), then
if and only if \(0\le \theta \le \varphi (1)\), where \(\varphi (x)=\frac{1}{x}-\frac{1}{\mathrm{e}^x-1}\).
Theorem 5.13
Under the conditions of Corollary 5.1, if \(0\le \theta \le \varphi (1)\), there is a positive M such that \(\theta \) method for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\) and \(m\ge M\) .
Proof
Obviously, we can obtain
which implies
Therefore, by Lemma 5.12 and the method of introduction , we can obtain that
Hence, \(\theta \)-method for (1.1) is asymptotically stable for \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\) and \(m> \theta (\Vert L\Vert +\lambda )(\tau _{k+1}-\tau _k)\), \(k\in {\mathbb {N}}\), if \(0\le \theta \le \varphi (1)\). \(\square \)
6 Conclusions
There are three advantages of a class of explicit exponential RK methods (which satisfy the conditions Theorem 4.2 or Corollary 4.4) for semi-linear IDEs. First, they can preserve asymptotical stability of semi-linear IDEs under the conditions of Theorem 2.2 which are weaker than the conditions of Corollary 5.1. Second, they can preserve asymptotical stability semi-linear IDEs without restriction on the stepsizes except that \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\). Third, they are suitable for stiff problems.
On the other hand, classical four-order explicit RK method preserves asymptotical stability of semi-linear IDEs without restriction on the stepsizes except that \(h_k=\frac{\tau _{k+1}-\tau _k}{m}\), \(k\in {\mathbb {N}}\), \( m\in {\mathbb {Z}}^+\), under the conditions of Corollary 5.1. And it does not need to compute \(\mathrm{e}^{h_kL}\) and \(\mathrm{e}^{c_ih_kL}\), \(i=1,2,\ldots , v\), \(k\in {\mathbb {N}}\).
References
Abada N, Benchohra M, Hammouche H (2009) Existence and controllability results for nondensely defined impulsive semilinear functional differential inclusions. J Differ Equ 246:3834–3863
Bainov DD, Simeonov PS (1989) Systems with impulsive effect: stability. Theory and applications, Ellis Horwood, Chichester
Bainov DD, Simeonov PS (1995) Impulsive differential equations: asymptotic properties of the solutions. World Scientific, Singapore
Benchohra M, Henderson J, Ntouyas S (2006) Impulsive differential equations and inclusions. Hindawi Publishing Corporation, London
Butcher JC (1987) The numerical analysis of ordinary differential equations: Runge-Kutta and general linear methods. Wiley, New York
Butcher JC (2003) Numerical methods for ordinary differential equations. Wiley, Chichester
Calvo M, Gonz\(\acute{\rm a}\)lez-pino S, Montijano JI, (2000) Runge–Kutta methods for the numerical solution of stiff semilinear systems. BIT 40:611–639
Cardinali T, Rubbioni P (2008) Impulsive semilinear differential inclusion: topological structure of the solution set and solutions on non-compact domains. Nonlinear Anal. 14:73–84
Dekker K, Verwer JG (1984) Stability of Runge-Kutta methods for stiff nonlinear differential equations. North-Holland, Amsterdam
Ding XH, Wu KN, Liu MZ (2006) Convergence and stability of the semi-implicit Euler method for linear stochastic delay integro-differential equations. Int J Comput Math 83:753–763
Ding XH, Wu KN, Liu MZ (2010) The Euler scheme and its convergence for impulsive delay differential equations. Appl Math Comput 216:1566–1570
Fan Z (2010) Impulsive problems for semilinear differential equations with nonlocal conditions. Nonlinear Anal 72:1104–1109
Friedli A (1978) Verallgemeinerte Runge-Kutta Verfahren zur Losong steifer Differentialgleichungssysteme. Numerical treatment of differential equations. Lect Notes Math 631:35–50
Fan Z, Li G (2010) Existence results for semilinear differential equations with nonlocal and impulsive conditions. J Funct Anal 258:1709–1727
Hairer E, Nørsett SP, Wanner G (1993) Solving ordinary differential equations I. Nonstiff problems, Springer, New York
Hairer E, Nørsett SP, Wanner G (1993) Solving ordinary differential equations II. Stiff and differential algebraic problems, Springer, New York
Lakshmikantham V, Bainov DD, Simeonov PS (1989) Theory of impulsive differential equations. World Scientific, Singapore
Lawson J (1967) Generalized Runge-Kutta processes for stable systems with large Lipschitz constants. SIAM J Numer Anal 4:372–380
Liang J, Liu JH, Xiao TJ (2009) Nonlocal impulsive problems for nonlinear differential equations in Banach spaces. Math Comput Model 49:798–804
Liang H, Song MH, Liu MZ (2011) Stability of the analytic and numerical solutions for impulsive differential equations. Appl Numer Math 61:1103–1113
Liang H, Liu MZ, Song MH (2014) Extinction and permanence of the numerical solution of a two-prey one-predator system with impulsive effect. Int J Comput Math 88:1305–1325
Liu X, Zeng YM (2018) Linear multistep methods for impulsive delay differential equations. Appl Math Comput 321:555–563
Liu MZ, Liang H, Yang ZW (2007) Stability of Runge-Kutta methods in the numerical solution of linear impulsive differential equations. Appl Math Comput 192:346–357
Liu X, Song MH, Liu MZ (2012) Linear multistep methods for impulsive differential equations. Discrete Dyn Nat Soc. https://doi.org/10.1155/2012/652928 (article ID 652928)
Liu X, Zhang GL, Liu MZ (2014) Analytic and numerical exponential asymptotic stability of nonlinear impulsive differential equations. Appl Numer Math 81:40–49
Maset S, Zennaro M (2009) Unconditional stability of explicit exponential Runge-Kutta methods for semi-linrear ordinary differential equations. Math Comput 78:957–967
Mil’man VD, Myshkis AD (1960) On the stability of motion in the presence of impulses. Sib Math J 1:233–237
Ostermann A, Daele M (2007) Positivity of exponential Runge-Kutta methods. BIT 47:419–426
Ostermann A, Thalhammer M, Wright WM (2006) A class of explicit exponetial general linear methods. BIT 46:409–431
Ran XJ, Liu MZ, Zhu QY (2008) Numerical methods for impulsive differential equation. Math Comput Model 48:46–55
Samoilenko AM, Perestyuk NA, Chapovsky Y (1995) Impulsive differential equations. World Scientific, Singapore
Song MH, Yang ZW, Liu MZ (2005) Stability of \(\theta \)-methods for advanced differential equations with piecewise continuous arguments. Comput Math Appl 49:1295–1301
Wang Q, Qiu S (2014) Oscillation of numerical solution in the Runge-Kutta methods for equation \(x^{\prime }(t) = ax(t) + a_0 x([t])\). Acta Math Appl Sin (English series) 30:943–950
Wanner G, Hairer E, N\(\phi \)rsett SP, (1978) Order stars and stability theorems. BIT 18:475–489
Wen LP, Yu YX (2011) The analytic and numerical stability of stiff impulsive differential equations in Banach space. Appl Math Lett 24:1751–1757
Wu KN, Ding XH (2012) Impulsive stabilization of delay difference equations and its application in Nicholson’s blowflies model. Adv Differ Equ. https://doi.org/10.1186/1687-1847-2012-88
Wu KN, Ding XH (2012) Stability and stabilization of impulsive stochastic delay differential equations. Math Probl Eng. https://doi.org/10.1155/2012/176375
Wu KN, Ding XH, Wang LM (2010) Stability and stabilization of impulsive stochastic delay difference equations. Discrete Dyn Nat Soc. https://doi.org/10.1155/2010/592036
Wu KN, Liu XZ, Yang BQ, Lim CC (2019) Mean square finite-time synchronization of impulsive stochastic delay reaction-diffusion systems. Commun Nonlinear Sci Numer Simul 79:104899
Wu KN, Na MY, Wang LM, Ding XH, Wu BY (2019) Finite-time stability of impulsive reaction-diffusion systems with and without time delay. Appl Math Comput 363:124591
Yang ZW, Liu MZ, Song MH (2005) Stability of Runge-Kutta methods in the numerical solution of equation \(u^{\prime }(t) = au(t) + a_0 u([t])+a_1 u([t-1])\). Appl Math Comput 162:37–50
Zhang ZH, Liang H (2014) Collocation methods for impulsive differential equations. Appl Math Comput 228:336–348
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Hui Liang.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work is supported by the NSF of PR China (no. 11701074).
Rights and permissions
About this article

Cite this article
Zhang, GL. Asymptotical stability of numerical methods for semi-linear impulsive differential equations. Comp. Appl. Math. 39, 17 (2020). https://doi.org/10.1007/s40314-019-0995-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-019-0995-1
Keywords
- Impulsive differential equations
- Runge–Kutta method
- Exponential Runge–Kutta method
- Asymptotically stable