
Abstract
The plane stationary free boundary value problem for the Navier-Stokes equations is studied. This problem models the viscous fluid free-surface flow down a perturbed inclined plane. For sufficiently small data the solvability and uniqueness results are proved in Hölder spaces. The asymptotic behavior of the solution is investigated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
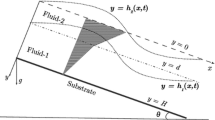
We consider a plane stationary flow of a viscous incompressible fluid moving under the gravity force along the fixed unbounded bottom \(S=\{x\in {\mathbb R}^2: x_2=\varepsilon ^2\varphi _0(x_1)\}\), where \(\mathrm{supp}\varphi _0\subset (-1,1),\) and \(\varepsilon >0 \) is a small positive parameter. So, \(S\) is a slightly perturbed plane \(\{x\in {\mathbb R}^2: x_2=0\}\) and the perturbation has a compact support. We assume that the vector \(\mathbf{e}^\gamma =(-\cos \gamma , \sin \gamma )\) makes an angle \(\gamma \in (0, \frac{\pi }{2})\) with \(x_1\)-axis and coincides with the direction of the gravitational force. The free boundary \(\Gamma \) of the fluid is a priori unknown and we look for \(\Gamma \) in the form \(\Gamma =\{x\in {\mathbb R}^2: x_2=\psi (x_1)=1+\varepsilon \Psi (x_1)\}\) Footnote 1, where \(\uppsi (x_1)>0\) for \(x_1\in (-\infty ,+\infty )\) and
Thus, we have to find the velocity vector \(\mathbf{u}(x)=\big (u_1(x), u_2(x)\big )\), the pressure function \(p(x)\) and the function \(\Psi (x_1)\) that solve in the unknown domain
the following boundary value problem for the Navier–Stokes system of equations
where \(\alpha =\frac{\pi }{2}-\gamma , \varvec{\tau }\) and \(\mathbf{n}\) are unit vectors directed respectively along the tangent and the outward normal to the free boundary \(\Gamma , \nu >0\) and \(\sigma >0\) are the constant coefficients of viscosity and surface tension, \(g\) is the acceleration of gravity, \(\mathcal{S}(\mathbf{u})\) is the deformation tensor with the elements \(\mathcal{S}_{ij}(\mathbf{u})=\nu \Big (\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\Big ), i,j=1,2, \sigma _t\) is the cross-section of the domain \(\Omega \) by the line \(x_1=t, \nabla = \Big (\frac{\partial }{\partial x_1}, \frac{\partial }{\partial x_2}\Big ), \hbox {div}\,\,\mathbf{u} =\nabla \cdot \mathbf{u}, \Delta \mathbf{u}=\nabla ^2\mathbf{u}, \mathbf{a}\cdot \mathbf{b}=a_1b_1+a_2b_2\).
Note that the left hand side of Eq. (1.2)\(_5\) is equal to the curvature \(K(x)\) of the free boundary \(\Gamma \) and the condition (1.2)\(_7\) prescribes the flow rate of the fluid over the cross-sections of the domain \(\Omega \). It shows that the fluid moves only due to the gravity force.
Mathematical problems for the stationary flows of a viscous incompressible fluid with a free boundary were a subject of many papers. Many references on this topic can be found—e.g.—in the bibliographies of [7, 15, 17, 18], etc. Coating flows with the static or dynamic contact angles were investigated in [3, 4, 8, 16, 19–22]. In all these papers, that are concerned both with compact and semi-infinite free boundaries, the following iteration scheme proposed in [4, 13], is used. It consists of solving the Stokes problem for the velocity and pressure in a given domain defined by the previous iteration and of finding the free boundary for the next iteration from the equation
and some additional boundary conditions (in our case, (1.2)\(_6\)) depending on the concrete problem under consideration. The velocity and pressure in (1.3) are obtained from the above-mentioned Stokes problem. This scheme of the solution of the complete nonlinear problem can be illustrated by the diagram
Note that in this scheme the construction of \((\mathbf{u},p)\) is separated from the construction of the free boundary \(\Gamma \) at every step.
The method described above can not be applied directly to the free boundary problems with free boundaries that are graphs over the whole line \(-\infty \le x_1\le +\infty \) (like in the problem (1.2)). The pressure \(q_k\) in the \(k\)-th approximation obtained from the Stokes problem in the domain \(\Omega _k\) has the gradient decaying exponentially as \(x_1\rightarrow \pm \infty \), but \(q_k(x)\) itself may tend to different constants \(q_k^+\) and \(q^-_k\). We always can normalize \(q_k(x)\) by setting \(q^+_k=0\), however, it can happen that
The pressure drop \(q_{*\, k}\) is the functional of the data of the Stokes problem (see formula (2.17) below) and in general \(q_{*\, k}\ne 0\). This makes it problematic to find the next approximation \(\Gamma _{k+1}\) of the free boundary from (1.3) or, more exactly, from the boundary value problem
that has a unique solution \(\Psi _{k+1}(x_1)\) if and only if the right-hand side \(\Phi _{k+1}\) of Eq. (1.5)\(_1\) decays sufficiently rapidly as \(|x_1|\rightarrow \infty \), which is possible only if \(q_{*\, k}=0\).
In order to overcome this difficulty, in [7] and independently in [1] a different scheme was proposed which was based on linearization of the problem on an appropriate exact solution in the unperturbed “uniform” flow domain \(\Omega _0 =\{ x \in {\mathbb R}^2: 0 < x_2 < 1\}\). The main difference of this scheme from the previous one is that on each step of iterations the determination of the velocity vector \(\mathbf{u}\) and the pressure function \(p\) is not separated from the determination of the free boundary \(\Gamma \) (i.e., of the functions \(\Psi \) describing \(\Gamma \)) and all the auxiliary problems are solved in the same fixed domain, i.e. in the strip \(\Omega _0\). This scheme can be illustrated as
Note that the arising linearized problem contains more boundary conditions than it is allowed by general ADN-elliptic theory and contains additionally the unknown function \(\Psi _k\) in the boundary conditions prescribed on the “free surface” \(\{x \in {\mathbb R}^2: x_2 = 1 \}\) of the “uniform” domain \(\Omega _0\). The solvability of the problem (1.2) and of the corresponding linear problem was proved in [7] and in [1]. In [7] the proofs are based on \(L^2\)-theory for the above-mentioned generalized elliptic problems (see [5] for general results of such type), and in [1]—on the detailed investigation of the pseudo-differential operator corresponding to the linearized problem.
Analogous results for two-fluid flows down a perturbed inclined infinite plane and in a perturbed inclined infinite channel with one moving wall were obtained in [11, 12]. The three-dimensional stationary free-surface flow over an inclined plane was studied in [2], and the non-stationary flow in [23].
Both methods proposed in [7] and [1] are rather complicated, and it is difficult to apply them in different (from \(L^2\)) functional settings. Moreover, these methods do not work in more complicated geometries. For example, they cannot be applied in the case where we have two nonintersecting free boundaries tending to some constants as \(x_1\rightarrow +\infty \) and \(x_1\rightarrow -\infty \).
In this paper, we propose a new iteration scheme which allows to investigate such cases. Having in mind further applications, we realize this scheme for the problem (1.2) and prove its solvability in the Hölder spaces. The scheme consists of the following: as in [1, 7], we map the unknown flow domain onto the strip \(\Omega _0\) and consider the problem in the fixed domain. However, now we separate finding the solutions \((\mathbf{v}_k, q_k)\) of the Stokes problem from determination of the functions \(\Psi _k\) describing the free boundary. In order to guarantee that on every step of iterations the pressure drop \(q_{*\, k}=0\), we introduce a smooth function \(H_0(x_1)\) and look for \(\Psi _k\) is the form \(\Psi _k(x_1)=\chi _{k}H_0(x_1)+\Upsilon _k(x_1)\). The constants \(\chi _{k}\) are chosen so that the pressure \(q_k(x)\) in the \(k\)-th iteration satisfies the condition \(q_{*\, k}=0\). This gives us the possibility to solve the problem (1.5) for the \((k+1)\)-th iteration, hence all \(\big (\mathbf{u}_k(x), p_k(x), \chi _{k}, \Upsilon _k(x_1) \big )\) are well defined. Finally, we prove that the sequence of iterations
converges to the solution \(\big (\mathbf{u}(x), p(x), \psi (x_1)\big )\) of the problem (1.2).
2 Function spaces and auxiliary results
2.1 Definition of function spaces
Let \(\Omega _0\!=\!\{x: 0\!<\!x_2\!<\!1\}\) be the strip in \({\mathbb R}^2, S_0\!=\!\{x: x_2\!=\!0\}\) and \(\Gamma _0\!=\!\{x: x_2\!=\!1\}\).
Let us introduce function spaces which we use in the paper. Denote by \(C^{l+\delta }(\Omega _0;\beta )\) (\(l\ge 0\) is an integer, \(\delta \in (0, 1), \beta >0\)) the Banach space consisting of \(l\)-times differentiable in \(\Omega _0\) functions having finite norm
where \(C^{l+\delta }(\Omega _0)\) is the usual Hölder space of functions.
Analogously, we define \(C^{l+\delta }({\mathbb R}, \beta )\) as the space of functions on \({\mathbb R}\) with finite norm
2.2 Transformation of the domain
Consider the function \(\omega (y_1,y_2; \Psi )\) given by the formula
where \(K(\tau )\) is an infinitely smooth function such that
and \(\zeta \) is an infinitely smooth cut-off function with \(\zeta (y_2)=1\) for \(|y_2|\le \frac{1}{4}\) and \(\zeta (y_2)=0\) for \(|y_2|\ge \frac{1}{2}\). Then \(\omega \) satisfies the boundary conditions
where \(\partial _{y_i}\omega =\frac{\partial \omega }{\partial y_i}, \, i=1,2\).
Define the transformation \(X(y)\):
which maps \(\Omega _0\) onto the domain \(\Omega \) given by formula (1.1). Let
be the Jacobi matrix of this transformation; then \(L=det\mathcal{L}\) is the Jacobian and \(\widehat{\mathcal{L}}=L\mathcal{L}^{-1}\) is the co-factors matrix of \(\mathcal{L}\). It is clear that \(L=1+\varepsilon \partial _{y_2}\omega \),
The lemma below is proved by direct calculations using the formulas (2.3)–(2.7).
Lemma 2.1
Let \(\varphi _0\in C^{l+3+\delta }({\mathbb R}),\; \mathrm{supp}\, \varphi _0\subset (-1,1), \Psi \in C^{l+3+\delta }({\mathbb R}, \beta ), \beta >0\). Then \(\omega \in C^{l+3}(\Omega _0, \beta )\) and the following estimates
hold. Here \(a_{ij}(y)=\big (\partial X_j^{-1}/\partial x_i\big )\big |_{x=X(y)},\; i,j=1,2,\) are the elements of the matrix \(\mathcal{L}^{-T}=(\mathcal{L}^{-1})^T\).
2.3 Stokes problem
Consider in \(\Omega _0\) the Stokes problem
Theorem 2.1
Let \(\mathbf{f}\in C^{\delta }(\Omega _0; \beta ), \mathbf{a}\in C^{2+\delta }({\mathbb R}; \beta ), {b}\in C^{2+\delta }({\mathbb R}; \beta ), {d}\in C^{1+\delta }({\mathbb R}; \beta )\), where \(\beta \in (0,\beta _*)\) with sufficiently small \(\beta _*\), and let the following compatibility condition
be satisfied.
-
(i)
There exists a uniqueFootnote 2 solution \(\mathbf{w}\in C^{2+\delta }(\Omega _0; \beta ), \nabla s\in C^{\delta }(\Omega _0; \beta )\) of problem (2.10) satisfying the estimate
$$\begin{aligned} \Vert \mathbf{w}\Vert _{C^{2+\delta }(\Omega _0; \beta )}+\Vert \nabla s\Vert _{C^{\delta }(\Omega _0; \beta )}&\le c\Big (\Vert \mathbf{f}\Vert _{C^{\delta }(\Omega _0; \beta )}+\Vert \mathbf{a}\Vert _{C^{2+\delta }({\mathbb R}; \beta )} \nonumber \\&+\Vert {b}\Vert _{C^{2+\delta }({\mathbb R}; \beta )}+\Vert d\Vert _{C^{1+\delta }({\mathbb R}; \beta )}\Big ).\quad \quad \end{aligned}$$(2.12)Moreover, the pressure function \(s\) exponentially tends to certain constant limits \(s^+\) and \(s^-\) as \(y_1\rightarrow +\infty \) and \(y_1\rightarrow -\infty \).
-
(ii)
The difference \(s_*=s^+-s^-\) is uniquely determined by the data of problem (2.10). There holds the following formula
$$\begin{aligned} s_*=s^+-s^-=\int _{\Omega }\mathbf{f}\cdot \mathbf{W}^0dy+ \int _{S_{0}}\Big (3\nu a_1-a_2 Q^0\Big )\, dy_1+\int _{\Gamma _0}\Big ( bQ^0 +\frac{3}{2}d\Big )\, dy_1,\nonumber \\ \end{aligned}$$(2.13)where
$$\begin{aligned} W_1^0(y)=\frac{3y_2(2-y_2)}{2}, \;\; W_2^0(y)\equiv 0,\;\; Q^0(y)= -3\nu y_1 \end{aligned}$$is the Poiseuille solution in \(\Omega _0\) satisfying the boundary conditions
$$\begin{aligned} \mathbf{W}^0(y)|_{y_2=0}=0,\quad W_2^0(y)|_{y_2=1}=0, \end{aligned}$$and having the unit flux.
-
(iii)
If \(s^+=s^-\), then the pressure \(s\) can be normalized by the condition \(\lim _{|y_1|\rightarrow \infty } s(y)=0\). In this case the estimate
$$\begin{aligned}&\Vert s\Vert _{C^{1+\delta }(\Omega _0; \beta )}\!\le \! c\Big (\Vert \mathbf{f}\Vert _{C^{\delta }(\Omega _0; \beta )}\!+\!\Vert \mathbf{a}\Vert _{C^{2+\delta }({\mathbb R}; \beta )} \!+\!\Vert {b}\Vert _{C^{2+\delta }({\mathbb R}; \beta )} \!+\!\Vert d\Vert _{C^{1+\delta }({\mathbb R}; \beta )}\Big )\nonumber \\ \end{aligned}$$(2.14)holds.
Remark
Inequality (4.4) with a small \(\varepsilon \) shows that also the exponent \(\beta \) should be chosen small. It can be shown that the constants in the inequalities (2.12) and (2.14) remain bounded when \(\beta \) is decreasing. The same is true for the estimate (2.19).
Proof
-
(i)
The first statement of the theorem is well known, for the proofs of analogous results in similar domains with noncompact boundaries see [7, 8, 18], etc.
-
(ii)
Let us prove formula (2.13). Multiply equations (2.10)\(_1\) by \(\mathbf{W}^0\), integrate over the domain \(\Omega _{0k}=\{y\in \Omega _0: |y_1|<k\}\) and, taking into account the identity (note that \(div \mathbf{w}=0\))
$$\begin{aligned} \nu \Delta w_i W_i^0=\nu \frac{\partial }{\partial y_k}\big (\mathcal{S}_{ik}(\mathbf{W}^0) w_i\big )- \nu \frac{\partial }{\partial y_k}\big (\mathcal{S}_{ik}(\mathbf{w}) W_i^0\big ) -\nu \Delta W^0_i w_i, \end{aligned}$$reduce the obtained expression to the form
$$\begin{aligned} \int _{\Omega _{0k}}\mathbf{f}\cdot \mathbf{W}^0dy&= \int _{\Omega _{0k}}\big (-\nu \Delta \mathbf{w}+\nabla s\big )\cdot \mathbf{W}^0dy \\&= -\int _{\Omega _{0k}}\nu \Delta \mathbf{W}^0\cdot \mathbf{w}dy-3\nu \int _{S_{0k}}a_1dy_1-\frac{3}{2}\int _{\Gamma _{0k}}d\,dS \\&+\,\nu \int _{\sigma (k)}\big (\mathcal{S}_{21}(\mathbf{W}^0)w_2-\mathcal{S}_{11}(\mathbf{w}) W^0_1\Big )\big |_{y_1=k}dy_2 \\&-\nu \int _{\sigma (-k)}\big (\mathcal{S}_{21}(\mathbf{W}^0)w_2-\mathcal{S}_{11}(\mathbf{u}) W_1^0\Big )\big |_{y_1=-k}dy_2 \\&+\,\int _{\sigma (k)}\big (s W^0_1\big )\big |_{y_1=k}-\int _{\sigma (-k)}\big (s W^0_1\big )\big |_{y_1=-k}. \end{aligned}$$Here \(S_{0k}=S_0\cap \{y_1: |y_1|<k\}, \Gamma _{0k}=\Gamma _0\cap \{y_1: |y_1|<k\}, \sigma (\pm k)=\{y\in \Omega _0: y_1=\pm k\}\). Passing in the last identity to a limit as \(k\rightarrow \infty \) and using the flux condition we derive
$$\begin{aligned} \int _{\Omega _0}\mathbf{f}\cdot \mathbf{W}^0dy= -\nu \int _{\Omega _0}\Delta \mathbf{W}^0\cdot \mathbf{w}dy-3\nu \int _{S_{0}}a_1\, dy_1-\frac{3}{2}\int _{\Gamma _{0}}d\, dS+(s^+-s^-).\nonumber \\ \end{aligned}$$(2.15)In view of the equation \(-\nu \Delta \mathbf{W}+\nabla Q=0\) we have
$$\begin{aligned} -\nu \int _{\Omega _{0}} \Delta \mathbf{W}^0\cdot \mathbf{w}dy =-\int _{\Omega _0}\nabla Q^0\cdot \mathbf{w}dy=\int _{S_0}a_2 Q^0\big |_{y_2=0} dy_1-\int _{\Gamma _0} b Q^0\big |_{\Gamma _0}\, dS.\nonumber \\ \end{aligned}$$(2.16)From (2.15) and (2.16) it follows that
$$\begin{aligned} s_*=s^+-s^-=\int _{\Omega _0}\mathbf{f}\cdot \mathbf{W}^0dy+ \int _{S_{0}}\Big (3\nu a_1-a_2 Q^0\big )\, dy_1+\int _{\Gamma _0}\big ( b Q^0 +\frac{3}{2}d\big )\, dS.\nonumber \\ \end{aligned}$$(2.17) -
(iii)
If \(s^+=s^-=0\), then estimate (2.14) follows from (2.12). \(\square \)
2.4 Boundary value problem for the ordinary differential equation
Consider the problem
where \(\gamma _0\) is a positive constant. The theorem below follows from the representation of the solution \(\Upsilon \) of (2.18) in terms of the Green function.
Theorem 2.2
Let \(G\in C^{1+\delta }({\mathbb R}; \beta ), \beta >0\). Then problem (2.18) has a unique solution \(\Upsilon \in C^{3+\delta }({\mathbb R}; \beta )\) and the following estimate
holds.
3 Linearization of the free boundary problem
Let
be the exact Poiseuille type solution of (1.2) for \(\varepsilon =0\), i.e.,
and
Using the formulas
it is easy to calculate that on the perturbed boundaries \(S=\{x: x_2=\varepsilon ^2\varphi _0(x_1)\}\) and \(\Gamma =\{x: x_2=1+\varepsilon \Psi (x_1)\}\) of the domain \(\Omega \) the function \(\mathbf{v}^0\) satisfies the boundary conditions
Substitute
into (1.2), introduce a new vector-field \(\mathbf{v}=\widehat{\mathcal{L}}\widehat{\mathbf{V}}(y)), \widehat{\mathbf{V}}(y)=\mathbf{V}(X(y))\), whose components are given byFootnote 3
and make the change of variables \(x=X(y)\) in (1.2). Since
we get the following problem in the strip \(\Omega _0\):
Let us compute \(\mathbf F\). Since \(\mathbf{v}^0(x)\) satisfies (3.1) we have
where \(\nabla =\nabla _y\) and \(\widehat{\nabla }=\mathcal{L}^{-T}\nabla \) is the transformed gradient \(\nabla _x\). Making use of \(\widehat{\mathbf{V}}-\mathbf{v}= (L^{-1}\mathcal{L}-I)\mathbf{v}, \widehat{\nabla }-\nabla =(\mathcal{L}^{-T}-I)\nabla ,\) we obtain
where \(L=1+\varepsilon \partial _{y_2}\omega \).
As for the boundary conditions, it is straightforward to compute
and
In addition, as
we obtain
Assume that
For sufficiently small \(\varepsilon \) from (2.8) (2.9) follow the estimates
where
Moreover,
where the constant \(c\) is independent of \(|\sin \alpha |\) and \(\varepsilon \).
4 Successive approximations
Let the function \(H_0\in C^{l+3+\delta }({\mathbb R}; \beta )\) be such that
We choose \(H_0\) as the solution of the problem
where \(\gamma _0=g\sigma ^{-1}\cos \alpha , h_0\in C^{l+3+\delta }({\mathbb R}; \beta )\),
Relations (4.3) are possible if the condition
is satisfied. Then in virtue of (2.19),
Integrating (4.2) we get
On the other hand, integrating by parts we obtain
From this formula and (4.3) we conclude that
Setting \(\Psi =\chi _*H_0+\Upsilon \) in (3.4) with the constant \(\chi _*\) that will be defined later leads to
Take as zero approximation \((\mathbf{u}_0, p_0, \psi _0, \chi _{0})=(\mathbf{v}^0, p^0, 1, 0)\), then define
and solve the following problems:
and
where \(\mathbf{u}_1=\mathbf{v}^0+\varepsilon \mathbf{v}_1, p_1=p^0+\varepsilon q_1\). Define \(\psi _1=1+\varepsilon (\chi _{1} H_0+\Upsilon _1)\). From (4.8), (2.12), (2.19) and the definition of \(\mathbf{A}\) it follows that
The following approximations are defined by
where
\((\mathbf{v}_{n+1}, q_{n+1})\) are solutions of the problems:
Finally, \(\Upsilon _{n+1}\) are solutions of
Notice that \(\chi _{n+1}\) are chosen so that
Indeed, applying (2.13) to the problem (4.13), we obtain
or, equivalently,
where
Substituting (4.12) into the last formula, we get
5 Convergence of successive approximations; existence of the solution
Assume that
From (2.12), (3.6), (3.7), (3.8), (3.10), (2.19) follow the inequalities
From (5.3)–(5.5) it is easy to deduce the following estimates:
Denote
For sufficiently small \(\varepsilon \) and \(|\sin \alpha |\) it follows from (5.6) that
Hence if \(Z_n\) and \(Z_{n-1}\) satisfy
then the same inequality holds for \(Z_{n+1}\).
Since \(Z_0=0\) and \(Z_1\) satisfies (5.7) (in view of (5.2)), (5.7) holds for all \(m\ge 1\).
Let us estimate the differences
We have
Then for sufficiently small \(\varepsilon \) and \(|\sin \alpha |\) we obtain from (5.8)–(5.10)
with \(\varrho <\frac{1}{2}\).
Note that in view of (5.7)
If \(n=2m\), then
with \(\lambda <1\). The case \(n=2m+1\) is similar. Now it is standard to show that
hence the sequence \(\big \{\mathbf{v}_n, q_n, \Upsilon _n, \chi _n\big \}\) converges in \(C^{l+2+\delta }(\Omega _0;\beta )\times C^{l+1+\delta }(\Omega _0;\beta )\times C^{l+3+\delta }({\mathbb R};\beta )\times {\mathbb R}\) to \(\big \{\mathbf{v}, q, \Upsilon , \chi _*\big \}\). Obviously, \(\mathbf{u}(x)=\mathbf{v}^0(x)+\mathbf{v}(x), p(x)=p^0(x)+q(x)\) and \(\psi (x_1)=1+\varepsilon \chi _* H_0(x_1) +\varepsilon \Upsilon (x_1)\) solve problem (1.2). Thus, we have proved the main result of the paper:
Theorem 5.1
Assume that \(\varphi _0\in C^{l+3+\delta }(-1, 1), \; \mathrm{supp\,} \varphi _0\subset (-1,1)\), and the numbers \(\varepsilon , \alpha , \varepsilon |\sin \alpha |^{-1}\) are sufficiently small. Then problem (1.2) has a unique solution \((\mathbf{u}, p, \psi \big )\). This solution admits the representation
where
\(\chi _*\) is a constant,
with \(0<\beta \le c_0\varepsilon \).
Notes
Without loss of generality we suppose that the height of the fluid at infinity is equal to \(1\).
The pressure \(s\) is unique up to an additive constant.
We performe this change of the unknown function in order to keep the divergence equal to zero.
References
Abergel, F., Bona, J.L.: A mathematical theory for viscous free-surface flows over a perturbed plane. Arch. Rat. Mech. Anal. 118, 71–93 (1992)
Abergel, F., Bailly, J.H.: Stationary free surface viscous flows without surface tension in three dimensions. Differ. Integral Equ. 25(9/10), 801–820 (2012)
Friedman, A., Velazquez, J.J.L.: The analysis of coating flows near the contact line. J. Differ. Equ. 119, 137–208 (1995)
Friedman, A., Velazquez, J.J.L.: The analysis of coating flows in a strip. J. Differ. Equ. 121, 134–182 (1995)
Kozlov, V.A., Maz’ya, V.G., Rossmann, J.: Elliptic Boundary Value Problems in Domains With Point Singularities, Mathematical Surveys and Monographs, vol. 52. American Mathematical Society, Providence (1997)
Ladyzhenskaya, O.A., Osmolovskii, V.G.: On the free surface of a fluid over a solid sphere, Vestnik Leningrad. Univ. Math. 13, 25–30 (1976) (in Russian); English Transl. Vestnik Leningrad. Univ. Math. 9, 197–204 (1981)
Nazarov, S.A., Pileckas, K.: On noncompact free boundary problems for the plane stationary Navier-Stokes equations. J. Reine u. Angewandte Mathematik 438, 103–141 (1993)
Pileckas, K.: Solvability of a problem of plane motion of a viscous incompressible fluid with noncompact free boundary. Differ. Equ. Appl. Inst. Math. Cybern. Acad. Sci. Lit. SSR 30, 57–96 (1981) (in Russian), [cf. also Zap. Nauchn. Sem. LOMI, 110 174–179 (1981) (in Russian); English Transl. in. J. Sov. Math. 25, 927–931 (1984)]
Pileckas, K.: The example of nonuniqueness of the solutions to a noncompact free boundary problem for the Navier-Stokes system. Differ. Equ. Appl. Inst. Math. Cybern. Acad. Sci. Lit. SSR 42, 59–65 (1988). (in Russian)
Pileckas, K.: On plane motion of a viscous incompressible capillary liquid with a noncompact free boundary. Arch. Mech. 41, 329–342 (1989)
Pileckas, K., Socolowsky, J.: Analysis of two linearized problems modeling viscous two-layer flows. Mathematische Nachrichten 245, 129–166 (2002)
Pileckas, K., Socolowsky, J.: Viscous two-fluid flows in perturbed unbounded domains. Mathematische Nachrichten 278(5), 511–623 (2005)
Pritchard, W.G., Scott, L.R., Tavener, S.J.: Viscous free-surface flow over a perturbed inclined plane. Philos. Trans. Roy. Soc. Lond. Ser. A 340, 1–45 (1992)
Pukhnachov, V.V.: Plane stationary free boundary problem for Navier-Stokes equation. Zh. Prikl. Mekh. i Tekhn. Fiz. 3, 91–102 (1972) (in Russian); English Transl. in: J. Appl. Mech. Techn. Phys. 13 (1972)
Socolowsky, J.: Solvability of a stationary problem on the plane motion of two viscous incompressible liquids with non-compact free boundaries. Z. Angew. Math. Mech. (ZAMM) 72, 251–268 (1992)
Socolowsky, J.: The solvability of a free boundary problem for the stationary Navier-Stokes equations with a dynamic contact line. Nonlinear Anal. Theory Methods Appl 21, 763–784 (1993)
Solonnikov, V.A.: On the Stokes equation in domains with nonsmooth boundaries and on a viscous incompressible flow with a free surface. In: Nonlinear Partial Diff. Equations and Their Applications, College de France, Seminar, vol. 3, pp. 340–423 (1980/81)
Solonnikov, V.A.: Solvability of the problem on the effluence of a viscous incompressible fluid into an open bassin. Trudy Mat. Inst. Steklov 179, 174–202 (1988) (in Russian); English Transl. in: Proc. Math. Inst. Steklov 179(2), 193–226 (1989)
Solonnikov, V.A.: Some free boundary problems for the Navier-Stokes equations with moving contact points and lines. In: Partial Differential Equations (Hans-sur-Lesse, 1993), Math. Research, vol. 82, pp. 329–350. Akademie-Verlag, Berlin (1994)
Solonnikov, V.A.: Problems with free boundaries and with moving contact points for two-dimensional stationary Navier-Stokes equations. Zap. Nauchn. Sem. St.-Peterburg. Otdel. Mat. Inst. Steklova (POMI) 213, 179–205 (1994). (in Russian)
Solonnikov, V.A.: On some free boundary problems for the Navier-Stokes equations with moving contact points and lines. Math. Annalen 302, 743–772 (1995)
Solonnikov, V.A.: Free boundary problems for the Navier-Stokes equations with moving contact points. In: Free Boundary Value Problems: Theory and Applications, Pitman Research Notes in Math. Series, vol. 323, pp. 213–241. Longman Scientific and Technical Publishing Co., London (1995)
Teramoto, Y.: On the Navier-Stokes flow down an inclined plane. J. Math. Kyoto Univ. 32, 593–619 (1992)
Author information
Authors and Affiliations
Corresponding author
Additional information
Dedicated to the memory of Professor M.Padula.
K. Pileckas: The research is supported by the Lithuanian-Swiss cooperation programme under the project agreement No. CH-ŠMM-01/01.
Rights and permissions
About this article
Cite this article
Pileckas, K., Solonnikov, V.A. Viscous incompressible free-surface flow down an inclined perturbed plane. Ann Univ Ferrara 60, 225–244 (2014). https://doi.org/10.1007/s11565-013-0201-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11565-013-0201-0