
Abstract
In this paper, a method for combining wideband and narrowband waveforms is proposed to improve target detection in shallow water environments. In this regard, a sonar waveform design suitable for target speed has been proposed too. The method uses a wideband frequency-modulated waveform for high range resolution in a reverberation environment and the Doppler-sensitive (DS) waveform to improve the detection of moving targets. The proposed combined waveform is mathematically modeled, and the Calculating of ambiguity function (AF) is performed. The AF and autocorrelation function (ACF) of the designed waveform indicate both DS and fair range resolution features simultaneously exist. So the initial range resolution for target detection is preserved. The Peak to Sidelobe level (PSL) ratio of the proposed waveform is at least 25 dB more than the previous state of the art waveforms. Calculating the Q-function criterion for the designed waveform reveals the superior reverberation suppression and detection performance with respect to the state of the art waveforms. After calculating the reverberation channel model, waveform echo, and detection of the target, the probability of detection (Pd) versus signal-to-reverberation ratio (SRR) was simulated by the Monte Carlo method. It was shown that the proposed waveform improved the probability of target detection by 20 dB, comparing to the base waveforms.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The purpose of using an active SONAR is to determine the effectiveness characteristics of targets by transferring the acoustic specific waveform to the given environment and analyzing and processing the received echo waveform from the target [1, 2]. The recent advances in software and hardware technology have provided the ability to design a wide range of waveforms in different conditions. In addition to these improvements, the new changes in the system requirements such as further use of the spectrum in a significant way and high sensitivity, the ability to save and process the informational content, and error range improvement, have increased the need for diversity of waveforms design [3].
Target detection and tracking of targets can significantly lead to the correct estimation of parameters and reduce the receiver's computational load through a feasible waveform design [4]. Waveforms design with low sidelobe levels is among methods when a matched filter complements it on the receiver side and maximize the signal to noise ratio [4, 5]. The complementary and orthogonal codes have been developed in radar and telecommunications over recent years [6, 7]. The waveform design in SONAR is an open research problem, and very few works have been presented in this field. The application of these technologies significantly improves the system function without increasing the hardware cost on the system. However, the waveform design can significantly affect the improvement of target detection, bit error rate (BER), power-consuming [3].
1.1 Related work
Designing and selecting the waveform with desirable function in an environment depends on essential factors of reverberation and target velocity [8]. The simultaneous estimation and measurement of speed and distance for the linear frequency modulation (LFM) waveform are severe [2, 5]. Moreover, bandwidth expansion and time interval in the LFM waveform led to a decreased PSL ratio. They caused many problems in target detection [5]. In recent years, unimodular sequence waveforms have been proposed to improve the correlation property and increase the PSL ratio [9,10,11]. The problem with these waveforms is that they take a long time to design the waveform and are very computationally complex. They cannot also be used in real-time. Therefore, in 2020, some methods have been proposed to reduce the computational load and sidelobe level. However, they cannot be used in real-time in underwater environments. In addition, its practical implementation is very complex and costly [12, 13].
In active SONAR, simultaneous measurement of high range and Doppler accuracy is one of SONAR systems' requirements in high reverberation environments [8]. This causes the waveform design to change. The continuous waveform (CW) is suitable for target detection with high speed and low range resolution (DS waveform). In contrast, the LFM wideband waveform is suitable for stationary targets detection [Doppler-insensitive (DI) waveform] [3, 8, 12, 14]. Due to the superior and extensive performance of FM waveforms in radar, sonar, and other telecommunications areas, frequency and time analysis tools and Processing techniques have been developed to investigate this waveform in recent years [10, 15,16,17,18]. It is suggested that to improve the detection of a target in the high reverberation environment, the benefits of two types of waveforms are used. Therefore, in 2013, a waveform was proposed for SONAR applications using maximum length sequence [19]. In 2019, processing methods were developed on this waveform and wideband waveforms [20]. Then, the pulse train waveform has been developed in a reverberation environment [21]. The continuous pulse train waveform can increase the Pd and accuracy in range and speed effectively. However, the bandwidth of this waveform is not sufficient to detect the target in shallow water and high reverberation conditions.
For a SONAR system, concurrent and precise measurement of the speed and range are required. The continuous-wave (CW) single-frequency waveforms measure the speed precisely while suffering from a weak range resolution [8, 19, 22]. However, the range resolution of frequency-modulated (FM) waveforms (e.g., linear FM and hyperbolic FM) is appropriate [23]. In this regard, a new hybrid method by combining FM and CW waveforms for simultaneous exploitation of both capabilities, DS, and fair range resolution has been presented [22]. However, as mentioned in Sect. 4, The sidelobe level of this waveform is high. It does not work well in shallow water environments. Recursive scatters in a shallow water environment due to the type of reverberations lead to changes in the target's reflection echo, resulting in an error in the receiver to detect the target. Therefore, the target is misdiagnosed. (For example, bunches of fish or subsurface and objects on the seabed). These errors make it very difficult to separate the target from the reverberation signal [23]. Also, the so far presented waveforms' ability is weak to suppress the reverberation in shallow water environments [24].
In recent years, waveforms designed to detect the targets in the sonar field have been based on developing CW waveforms [8, 25,26,27,28]. In 2017, the Generalized Sinusoidal Frequency Modulated (GSFM) waveform was proposed to simultaneously detect underwater targets [25], measuring speed and range. This waveform is a state-of-the-art waveform whose bandwidth is increased relative to CW to the target detection. In 2019–2020, this method was compared with other applied state of the art waveforms in sonar [8, 26]. Other examples of SFM and Costas CW waveforms have been developed based on CW [21, 27].
In 2020, the Phase-Coded Sequence Design Method was proposed to improve the sonar target detection rate [28].
According to the criterion Q function, these proposed waveforms can not detect the target at SSR lower than the LFM waveforms [21]. In addition, for the PSL ratio criterion, the sidelobe level of the GSFM waveform is higher than the LFM waveform [8]. Therefore, a weak target cannot be detected. The problem with the LFM waveform is that they are weak and fail to detect moving targets [3, 8, 12, 14, 23]. Also, existing methods for increasing the CW waveform bandwidth [8, 25,26,27,28] still have a small bandwidth that does not present a high range resolution feature.
1.2 Contributions and paper structure
According to the mentioned methods and their comparison in Sect. 1.1, it can be concluded that the sofar sonar proposed waveforms are not suitable for shallow water environments. Therefore, in shallow water, high reverberant environments, detection is faulty, and resolution accuracy is also low. As a result, waveforms should be designed with both excellent resolution and Doppler characteristics. Given that target, detection requires high bandwidth in a high-reverberation environment. It is suggested that the benefits of two types of waveforms (DS feature and DI) are used to improve the detection of a target in the high reverberation environment. Hence, with the proposed method, the single waveform that simultaneously has DS and fair range resolution feature in a reverberation limited shallow water environment is presented. In contrast to the existing methods for increasing the CW waveform bandwidth in the proposed method, the DS feature is added to wideband waveforms such as FM. This paper's research findings show that underwater targets in shallow environments are detected employing a combined wideband waveform with fair range resolution and high detection probability. Therefore, the DS characteristic of the wideband waveform was achieved.
The proposed method can design the waveform according to the desired range of target speed. In this method, parts of the waveform frequencies are removed according to the Target speed range in which we want the target detection to be more probability performed. The corresponding amplitude of those frequency components is zero. Due to the wideband waveform division into several differentiated amplitudes with independent bandwidths and central frequency, Doppler-sensitive codes with excellent correlation characteristics can be combined according to the amplitude number. Complementary codes with high PSL such as Golay and MLS can be combined according to the target speed and underwater environment conditions. Then, assuming the amplitudes’ orthogonality and calculating of AF, increasing the PSL and subsequently reducing the sidelobe level of the correlation function for the AF is obtained, leading to an increase in target detection probability. Therefore, we design a waveform that has both Doppler-sensitive and non-Doppler-sensitive features simultaneously with the ability to detect in shallow water environments. The results show that the reverberation level was detected by the proposed waveform is at least 35 dB lower than another state of the art sonar waveforms. Therefore, the proposed waveform design's ability to suppress the reverberation is very promising. This paper's primary motivation is to detect the target at a very high reverberation level. A single waveform can simultaneously have a DS and high range resolution in a reverberation limited shallow water environment. The details of these are presented in Sect. 4.1. To achieve this purpose, for the first time, we have proposed a method for combining wideband waveforms with narrowband waveforms. As a result, with the proposed method, the benefits of wideband waveforms, DS waveform would be used simultaneously and independently without negatively affecting each other. In Sect. 4, innovative formulas are presented for the proposed combination waveform. The main contributions of this paper are as the following:
-
Propose a method for combining wideband waveforms with narrowband waveforms.
-
Calculating the Q-function criterion for the designed waveform and proving the superior reverberation suppression performance than state of the art waveforms.
-
Presenting an algorithm to design flexibility waveforms for improvement of detection.
-
Presenting the efficient proposed method of target detection based on target speed in reverberation-limited environments.
-
Mathematically modeling to proposed combined waveform and Calculated the AF of it.
-
The significant reduction of sidelobe level for the proposed waveform compared to state art waveform.
The rest of this paper is organized as follows. In Sect. 2, the formulation, features, and comparing of necessary Doppler-sensitive waveforms Can be developed in the proposed method will be presented. In Sect. 3, with an analysis comparing the wideband waveforms, different advantages of the introduced waveforms are exploited to propose a new waveform is presented. In Sect. 4, the proposed waveform design algorithm and compare it with the other well-known waveforms. Section 5 depicts the simulation results, and finally, Sect. 6 involves the conclusion.
2 Mathematical models of Doppler-sensitive waveforms
Two waveforms CW and LFM, are very weak, considering the increased need for proper detection and high-range resolution in shallow waters [29]. Therefore, these two types of waveforms indicate a compromise between range and Doppler resolution. This section has a brief overview of the essential Doppler-sensitive waveforms used in the sonar field.
2.1 Pseudo random noise sequence (PRN)
These codes are also used in watermarking for encrypted speech signal [30] because of high resistance against noise, interference, excellent correlation properties with a cross-correlation equal to − 1 [10]. MLS has given by the following relation [10]:
2.2 Complementary codes
In these codes, if two waveforms' output correlation functions are summed up, the side lobes' algebraic sum becomes zero, and the main lobes become 2 N. N is the number of elements of both codes [31]. If \({C}_{a,i}\) is the correlation of Golay pair codes for “a” coefficients and \({C}_{b, i}\) is the correlation of Golay pair codes for “b” coefficients, then we have [31]:
These codes have also been used in channel coding techniques that require a low bit error rate (BER) [32].
2.3 Costas codes
Costas signal is, in fact, a sequence of single-frequency signals with different frequencies. The signal structure is as follows [27]:
Generally, Costas frequency sequences generate the frequency hopping (FH) whose side lobes Peak in the AF curve, and the whole delay-Doppler plane is lower than the main lobe by 1/Nf.
3 Wideband waveforms
3.1 Compare the LFM and HFM
After deriving from the phases of the LFM and HFM waveforms and calculating the delay of the transmitted and received instantaneous frequencies, it is proved that all the frequencies of the received HFM waveform have a constant delay compared to the transmitted frequencies. Unlike the HFM signal, it is not constant for the LFM and changes over time. The above points show that the HFM waveform is resistant to Doppler's effects [15, 33]. Thus, target detection for LFM in the matched filter will be more erroneous than the HFM waveform. Therefore, the HFM waveform should be used in environments having a wide range of Doppler deviation. Comparing the amplitude spectrum of the two LFM and HFM waveforms, the function’s amplitude is not the same in different frequencies of the HFM spectrum. Hence, the above characters in the correlation function and the matched filter contribute significantly to the detection probability.
3.2 AF and Q function
For an active SONAR system, the AF shows the solution of an adaptive filter to time delays and different Doppler shifts [33]. The AF for wideband waveform is defined as follows [34]:
where \(s^{*}\) denotes the complex conjugate of s, \(\tau\) denotes the time delay of s. When the waveforms are wideband, the frequency shift proportional to the Doppler scaling factor (\(\eta\)) is given by the following relation [28]:
where v is the target's velocity, and c is the signal propagation speed in the water. The Q-function criterion is based on AF. It can estimate the reverberation level of the transmitted signal in the cross-section of speed or equal to the target Doppler. According to the known formula, we have [32]:
So, when \(\tau = 0, \;\eta = 1\) is established, the AF is \(\chi \left( {0;1} \right) = 1\), so we have:
Therefore, the Q-function in \(\tau = 0\) is shown in (7). The above function can be interpreted as the volume of a given Doppler cross-section in the AF [33].
4 Proposed method
4.1 Challenges and motivation
Despite years of research and study, underwater target detection is still one of the permanent challenges ahead of SONAR systems’ marine users. Considering the water motion effect, the wave path's geometries create a target-environment SONAR platform, usually considered a time-varying multipath channel [35]. Recursive scatters in a shallow water environment due to reverberations lead to changes in the target's reflection echo, resulting in an error in the receiver to detect the target and its speed. Therefore, the target is misclassified. Given that most of the waveforms developed in recent years are based on the CW [8, 25,26,27,28], when the signal-to-resonance (SRR) ratio decreases in a shallow environment, the probability of detecting this type of waveform decreases. Furthermore, due to low bandwidth, they cannot detect with fair range resolution. In a reverberation-limited environment, it is clear that in order to separate a target from the reverberation, a fair resolution is required [29]. Therefore, for this purpose, according to the range resolution mathematical relation, in order to detect the target with high range resolution, we have to use wideband waveforms. The problem with these waveforms is that they are weak and fail to detect targets at low speeds. Due to the above conditions, the single waveform is not provided to detect and track targets with different speed ranges for shallow environments and real-time and automatically. The operator selects the appropriate waveform for detection and tracking according to the target's conditions and speed. Therefore, we need to design a single waveform that can simultaneously have DS and fair range resolution in a reverberation limited shallow water environment. Combining these two waveforms is among issues that, so far, few works are presented. Selecting hybrid waveforms with DS and DI features causes the SONAR system to simultaneously detect low and high Doppler target speeds. Therefore, separating moving targets from reverberation using a combined waveform. Which can simultaneously provide Doppler resolution with DS waveform and range resolution with DI waveform in a pulse, which becomes possible target detection in coastal regions. We used a wideband waveform to detect the target as the base wideband waveform to achieve this purpose. Due to the DI to this waveform, it is weak in detecting targets at low speeds. Therefore, by combining the base waveform with DS codes, the feature of detecting moving targets can be added to the wideband waveform, which in Sects. 4.4 and 4.3 innovative mathematical formulations are presented for this combination. The proposed method adds the DS property to the FM base waveform to detect low-speed targets and preserve the initial range resolution for target detection. The methodology and steps of designing the proposed waveform with details are in the following. In Sect. 4.2, a solution to improve the probability of target detection for wideband waveforms at very low frequencies underwater is proposed. As a result, a significant reduction in sidelobe level is achieved compared to other state-of-the-art waveforms. At the end of this section, the idea of eliminating frequency components appropriate to the Doppler range of the target velocity is proposed. Section 4.3 calculates the proposed initial waveform's AF and presents it as a mathematical formula. Next, in Sect. 4.4, a method is proposed to combine the proposed initial waveform with Doppler-sensitive codes, and the AF is calculated. A novel mathematical formulation is proposed to combine wideband waveforms with zero or negative cross-correlation codes. The presentation of formulas is suggested in Sect. 4.4. Therefore, the inflexible wideband waveform can be made flexible by adjusting the variable parameters of the jump frequency, carrier frequencies, and small bandwidth size (N-frequency bands) and removing the frequency components from the waveform. Creating distinct N amplitudes with independent carrier frequencies can be combined with the designed waveform with complementary codes with zero and negative cross-correlations. In Sect. 4.5, a new waveform is proposed to improve the detection rate according to the previous sections' algorithm. In this method, to increase the detection probability, CW waveforms with Costas carrier frequencies can be added to the frequencies that have been omitted. In the proposed algorithm, using the combined waveform and complementary codes and the Hemming window, the sidelobe level was significantly reduced by at least 25 dB without using correlation optimization methods, which are very computationally complex to use on a sonar system. Computational complexity is presented in Sect. 4.6. Finally, in Sect. 5, in order to show the practicality of the designed waveform in a shallow water environment, the reverberation channel model, waveform echo, and detection rate of the target are calculated, and the Pd versus SRR was simulated by the Monte Carlo method. Therefore, the performance of the proposed waveform algorithm in high-reverberation environments is performed. The steps are described in the following sections.
4.2 ACF of the wideband waveform in low frequency
It is noteworthy that the minimum possible sidelobe level of a wideband waveform is 10log(BT) [10]. Therefore, to achieve a low side lobe level, the bandwidth must be reduced. However, if we can reduce the bandwidth of the wideband waveform in a piecewise way, the sidelobe level reduces. Considering the previous sections' mentioned facts, wideband waveforms such as FM are the best choice in high reverberation environments. The waveform should also be sensitive to the doppler effect to detect the target having low Doppler. To increase the range of permeability of sound waves in water, we should use low frequencies carrier and reduce the effect of reverberation in a shallow water environment and increase the range resolution; we have to use wideband waveforms such as HFM. As can be seen in Fig. 1 for the HFM waveform \(\left( {\frac{BW}{{f_{c} }}} \right)\) is equivalent to the bandwidth ratio of the waveform to the carrier frequency. When the bandwidth increases, the PSL ratio decreases. Consequently, some targets with lower target strength (TS) values are masked and not detected. In a radar system, the frequency deviation for target Doppler is less than 0.001%, while in sonar, it is about 1%, which is the reason for Eliminate some frequency components from waveform to get efficient detection in shallow water conditions. The empty sections in the spectrum of the transmitted waveform prevent it from interfering with the received waveform and, consequently, improve detection. Therefore, to get a better detection, the spectrum of the waveform must have empty sections. Therefore, to overcome this problem, one way to use wideband waveforms in high reverberation environments is to eliminate some of the waveforms' frequencies. Then, the waveform is divided into N bandwidths (BWseg), a better result of the correlation function can be obtained in the output by combining N-length complementary codes, which have correlation function with lower sidelobe level.

Comparison of HFM waveform correlation function with bandwidth increase
The theory for waveform and detection design is that due to the reverberation level and the desired speed range for detection, part of the frequencies can be removed by selecting the bandwidth and the bandwidth frequency mutation waveform. In this regard, the waveform parameters should be adjustable to remove some of the frequency components to create the ability to design the waveform appropriate for the speed and add DS codes to the waveform. According to the Q function, all speed ranges can be detected at the level of detectable reverberation much lower than the LFM waveform with high probability by selecting bandwidth (BWs) and FH. In other words, by designing a thinner Q function, similar to the Q function of Doppler-sensitive waveforms with the ability to adjust the speed range, the desired waveform shape can be designed. In the proposed method, we can change the modulated carrier frequency (fc), bandwidth (BWseg), and pulse length (T) for each segment from the pulse independently to control the transmitted signal. The cost of designing, generating, and transmitting for this waveform is not more than an LFM waveform. However, the wideband waveform is divided into several differentiated amplitudes with independent bandwidths and central frequency. This makes the design have many adjustable parameters comparing to the standard LFM waveform.
4.3 Calculate the AF of the proposed initial waveform
According to this idea, the above theory is mathematically described, and its AF is obtained. The designed waveform, the frequency, and bandwidth of which can vary are as follows:
That p(t) is the pulse train waveform, each of which has a \(f_{n}\) carrier frequency. The frequency \(f_{0}\) is the carrier frequency of the primary pulse, \(\Delta f\) is the hop size of the carrier frequency, and n is the number of each pulse of the waveform. After rewriting, the transmitted waveform is obtained as follows:
In the following, the waveform AF will be calculated as follows:
After simplification, the following formula is obtained:
After the absolute value of the above relation can be expressed as follows:
If we assume that P = m − n = 0, then after simplification, the following relation will be reached for the AF:
In n, for comprehensive purposes, instead of n, which is from 1 to N − 1, random sequences can be used to reduce the sidelobe. However, provided N does not exceed the carrier frequency in the range of the transmitted waveform. Each of the selected frequency bands with a carrier frequency has a bandwidth less than the FH. Thus, the initial waveform (LFM) AF was obtained in terms of variable parameters for waveform design. In the simulation section, setting the above formula's parameters improves the detection in the considered speed range.
4.4 Combining the waveforms
By designing coded waveforms, the sidelobe level can be reduced in the waveform correlation function. To this purpose, the use of complementary code and sequence code with MLS that create low side lobes level in the receiver is suggested. The advantage of the fragmented wideband waveform is that the number of the wideband function fragmented bands can be designated given the number of codes. Considering that in the design idea of the proposed waveform, the waveform is divided into N bandwidths (BWseg), a better result of correlation function can be obtained in the output by combining N-length codes, which have correlation function with lower sidelobe level. It is worth mentioning that after investigating different types of windows, the hamming window was used, given the obtained results to reduce the sidelobe [36, 37]. The proposed algorithm steps are as follows.
4.4.1 Form the N waveform according to the length of code used
In the proposed idea, the waveform is divided into N pulses according to the code length. Then, each N code is multiplied by the waveform that is the N segment. For example, if the code length is N. The W(t) waveform with codes such as Golay, MLS, after multiplying in the designed waveform, creates a combined waveform. The output waveform obtained from the proposed combined method of the two waveforms can be written as follows:
where \(\Delta f\) is the same FH described in the proposed waveform present formula in Eq. (8).
4.4.2 The algebraic sum of the signal N multiplied by the codes \(a_{n}\)
The sum of the transmitted signals can be defined as follows:
where n denoted the number of distinct amplitudes. After sending the waveform, the received waveform is as follows:
where “\(SC\)” scatter coefficient of a target is observed, \(\tau_{0}\) is the time delay for the signal distance traveled, and n(t) is the noise at time t.
4.4.3 Calculation of AF
By placing the equation \(W_{T} \left( t \right)\) in the AF formula, n and r are the index of the waveform transmitted and received. If the AF is also rewritten as a sum of cross-correlation and auto-correlation, the formula will be as follows:
ACF and CCF are auto-correlation and cross-correlation functions, respectively, and we consider the correlation between the bands of different frequencies to be zero. Then, given that the codes \(a_{n}\) in the resulting equation must be observed for the ambiguity function. Equation \(w_{n} \left( t \right) = a_{n} \cdot w\left( {t - \left( {n - 1} \right) \cdot \Delta t} \right)\) is placed in the above relations, and the following formula is obtained:
4.5 Using Costas waveforms to improve detection
So far, two methods have been proposed to improve detection in the high reverberation environment. The first one is the consecutive use of CW and HFM or LFM waveforms. The main weakness of this method is that only one target can be detected in this way. If there are more than one returning echo of several targets, the Doppler and range detection of separate each target becomes difficult. In the second method, it is emphasized that several SONAR signals are sent simultaneously [21]. This method can be simulated as follows: the simultaneous sum of two types of DS and DI waveforms. As shown in Fig. 2, this method's problem is that the autocorrelation sidelobe level in the AF is higher than when the two types of the waveform are transmitted separately (in Fig. 3). Therefore, considering the disadvantages of the previous methods, several DI and DS signals can be simultaneously sent in different frequency bands in the proposed method to avoid these problems. Given that parts of the frequency components of the wideband waveform have amplitude with zero value. Therefore, this idea can be developed for the proposed hybrid waveform. The suggested method is to use both waveforms in a hybrid way, provided that the frequency of the LFM or HFM waveform does not overlap with the CW waveform. Therefore, it is recommended. In this section, a new waveform is proposed to improve the detection according to the previous sections' presented method. In this method, the deleted frequency components are considered as the CW waveform carrier frequency with Costas code distribution for transmission. The proposed method can also be used, and some frequency components can be removed for this purpose. To increase the detection probability of target, CW waveforms that Costas carrier frequencies can be added to the frequencies that have been omitted. With the proposed method, adding it to the proposed waveform design algorithm can take advantage of wideband waveforms, and Doppler-sensitive codes can be used simultaneously and independently without negatively affecting each other.

CW + HFM waveform AF

CW, HFM waveform AF
When we do not have information about the target speed range that we want to detect. The above method helps increase the Pd and reduce the error, and another application of this method can be used for coding and synchronization. Costas code can offer accuracy in speed and better detection in high reverberation using different and distinct frequencies. In this regard, the following proposed formula is presented that the frequencies of the two waveforms that are added do not overlap with each other. This formula is as follows:
So that
where \(f_{n}\) denotes the carrier frequencies with the distribution of Costas codes, \(W_{T} \left( {t_{ } } \right)\) denotes the proposed formula in Eq. 16.
4.6 Computational complexity
Given that the length of the code is complementary N, the whole waveform based on the removal of frequency components is divided into N segments; each segment has an L sample with the same amplitude. Therefore, using the block method, the complexity of waveform design is O(N) + O(Nlog2N). It is worth noting that N is equal to the number of waveform amplitudes, for example, 16. The computational volume order is equal to 16 × 4 = 60, which has a lower processing volume than other presented waveforms. Since the wideband waveform is converted into several chirps with independent carrier frequencies. Therefore, it is easier to implement and send it in water. Another advantage is the waveform designed in the processing section, designed in real-time according to the target speed and the environment. According to the frequency separation in the matched filter section, the receiver's processing load is reduced. Therefore, the proposed algorithm for waveform design can be considered a real-time implementation that significantly reduces the transmitter and receiver sections' processing load.
5 Simulation and results
This section presents the proposed method's simulation results for waveform design to improve detection and compare it with other methods. The function and ability of detection in the reverberation environment can be investigated using the cut of the AF at a time delay of zero using the Q function at different speed intervals [29]. As described in the proposed algorithm, depending on the underwater environment and the range of speed and target range, the type of waveform, central frequency, and bandwidth for the waveform is determined and then in the next step according to the desired speed range to detect the target, the choice of FH and the number and size of small bandwidths are determined.
At this stage, to increase the accuracy of Doppler estimation and the Pd, according to the number of small bands created, the pair of Golay code pairs are added to it. When the amplitude is zero, the CW waveform is added with the Costas codes' frequencies, and the created waveform is transmitted.
Figure 4 shows the waveform design AF based on LFM and HFM, respectively. As can be seen in AF shape, the designed waveform has a DS property. As shown in the Q-function function Fig. 5, by adjusting the frequency hopping and the number and size of small bandwidths, the target's speed range can be detected with a higher Pd. Suppose another target is observed at a different speed. In that case, the same process can be repeated, and the designed waveform will have two bands of frequencies to improve the detection of those targets.

The proposed waveform's AF is based on LFM (Left) and HFM (right)

Q Function for designed waveform using adjustment FH and BW and initial frequency
5.1 Calculation of waveform parameters
The proposed method for designing the waveform is proportional to the intended speed, and as follows:
-
1.
The range of speeds for detection, e.g., 5 m/s, we calculate the corresponding Doppler frequency:
$$ f_{d} = \frac{{2Vf_{c} }}{C} = \frac{2 \times 5 \times 7500}{{1500}} = 50\;{\text{Hz}}; $$(21) -
2.
Therefore, according to the range of 5 m/s based on calculation, at a frequency of 50 Hz, ambiguity occurs in the Q function and the minimum FH is 50 Hz.
-
3.
Given that the bandwidth is available for the entire BW = 2000 Hz waveform and that the Golay code will be used to reduce the PSL, the choices are limited to a pair of power codes of two. Option values 8, 16, and 32 are selected as the number of domains. Here, a pair of 8 Golay codes are selected, with a corresponding range of the frequency hopping can be considered 100 Hz. The bandwidth is 16 × 100 = 1600 Hz.
5.2 Q function performance evaluation and comparisons
Due to the fact that the reverberation has a significant effect on the detection performance of an active sonar system in a shallow underwater environment. Therefore, it must be analyzed and interpreted. As introduced in Sect. 3.2, the Q function criterion is described below to evaluate the performance of the proposed waveform in the reverberation environment for different target velocities. The Q function is a cross-section of velocity in the AF that can be used to measure and compare performance between different waveforms in shallow water reverberation environments. The interpretation of Q function in underwater is that the smaller its value, the better the ability of the waveform to detect the target in the underwater reverberation limited environment.
As bandwidths decrease, Q-function becomes narrower and makes the detection rate better, and vice versa; as the bandwidth increases, Q-function expands, and the detection range decreases. It is worth noting that the minimum and maximum difference for the proposed waveform is about 45 dB, which is a significant amount to eliminate reverberation and improve detection. Figure 5 shows how to design a waveform by changing FH, BWs, f0, and initial frequency. By changing any of these parameters, the appropriate waveform can be designed and sent for detection at the reverberation level that is much lower than the base waveform with each target speed range. The minimum points that occur in Q function are related to the range of speeds at which we want to detect the target with the lowest possible reverberation level. Also, with two separate transmitters and receivers, the entire detection speed range can be detected at the low reverberation level with the proposed method. In the following, Fig. 6 shows the designed waveform and LFM in the frequency and time domain. Figure 7 shows the Q-function for CW, LFM, GSFM waveforms, and the designed waveform with the same bandwidth of about 1600 Hz. For CW waveforms, in the speed range from − 3 to 3 m/s, the reverberation level for detection is − 4 dB. This waveform works poorly to detect targets in the reverberation environment. The ability to detect by CW waveform for moving targets increases at a speed of more than 3 m/s. As expected, the Q function designed waveform has become similar to Doppler-sensitive waveforms such as the CW. The CW waveform is not adjustable for the detection speed range. It also has a very poor range resolution. In the proposed waveform, due to the addition of the DS property to the waveform and the ability to adjust the speed range required to detect the target, it also has a high-resolution resolution feature.

Designed waveform and LFM in frequency and time domain

The Q-function for CW, LFM, GSFM waveforms, and the designed waveform
The reverberation level is approximately − 32 dB for the LFM waveform with 1600 Hz bandwidth. On the other hand, HFM and LFM have almost the same performance in reverberation. The designed waveform has a less detectable reverberation level than all other waveforms due to the PSL ratio decrease at all speeds. Besides, for a desirable speed in the Q-function, the waveform design reverberation level for detection is about 35 dB less than the LFM waveform. The effect of removing frequency components from the LFM waveform explains this improvement of at least 35 dB to detect the target in the desired speed range. As it can be observed, the proposed waveform has a much better reverberation suppression efficiency than another state of the art waveforms.
5.3 ACF performance evaluation and comparisons
In order to compare and confirm the performance of the proposed waveform with another state of the art waveforms, its ACF was calculated. Moreover, the PSL ratio was obtained to evaluate the performance of the proposed waveform. Then, to compare and evaluate the performance of the proposed waveform and state-of-the-art waveforms in the sonar, ACF of GSFM and SFM waveforms were also calculated. Figure 8 shows the ACF of the proposed waveform and the state-of-the-art waveforms in the sonar.

ACF of GSFM (left) and SFM (right) waveform [8], and ACF of the designed waveform (down)
The designed waveform shows a significant superiority over the state of the art methods. The second power of the AF of the designed waveform is compared. As expected, the proposed method and the use of high auto-correlation codes have a significant superiority. The superiority of at least 30 dB for the proposed waveform's PSL ratio over the GSFM and SFM waveforms is shown in Fig. 8. The important point is that similar to the proposed waveform, the GSFM waveform simultaneously has Doppler-sensitive features and proper resolution. Significant reduction of sidelobe level confirms the results of the proposed method. Therefore, the proposed method improves the ability to detect weak targets. The effect of deleting frequency components and complementary codes for the proposed combined waveform is demonstrated in the PSL ratio. Moreover, ACF was calculated for LFM and BPSK waveforms for further evaluation and comparison. Comparing PSL ratio results for the proposed waveform compared to another state of the art waveforms in sonar is listed in Table 1. PSL ratio is at least 35 dB superior to another state of the art sonar waveforms. Separation of waveform amplitudes by removing the calculated frequency components along with the use of Doppler-sensitive codes that have good correlation characteristics describes the results. The PSL ratio indicates that the waveform is capable of detecting weak targets with low target strength (TS) that are masked in other waveforms.
5.4 Flowchart of the proposed algorithm
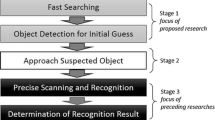
To implement and enhance the proposed method for all states of target velocities, the algorithm's flowchart for designing the adaptive waveform in Fig. 9 is proposed. As shown in Fig. 7, the maximum probability of detecting the target is equal to the Q function's minimum points at speeds of 5 m/s. Suppose the target detection was in a real underwater environment, and we do not know the exact information about the target speed. In that case, the proposed algorithm flowchart can be used to design waveforms. For example, If the target speed in the first stage of detection is 3 m/s. In this case, the waveform parameters can be adjusted according to the speed of the target. Therefore, the Q function's minimum point is designed at 3 m/s and transmitted in the next state. Thus, the target detection can be done with more Pd and less transmitted power.

Flowchart of the proposed algorithm
5.5 Performance evaluation of Pd versus SRR
At this stage, a model of an acoustic channel with limited reverberation property was considered to detect targets in shallow waters. The channel model can be simulated for different environmental conditions by controlling the echo of the targets and reverberation rate. In this research, it is assumed that noise is also an additive white Gaussian noise (AWGN), and the structure of the received reverberation is Rayleigh distribution [38,39,40]. The simulation method of the reverberation, echo received, noise, and target detection versus SSR in the block diagram shown in Fig. 10 are shown. By changing the reverberation level, the SRR can be increased or decreased. The reverberation simulation is shown in Fig. 11. To test and validate the optimal designed waveform, the experiments were conducted in a Monte Carlo framework for each SRR. To simulate the underwater environment, the Monte Carlo test included a waveform generator for the transmitter section, matching filter, CA-CFAR detector, and range gating technique for the receiver section, respectively. The evaluation and validation of the proposed algorithm were evaluated by extracting the ROC diagram. The Pd versus signal SRR was simulated. Simulation has been carried out with MATLAB 2017 software. The parameters for designing the proposed waveform and other simulation parameters in MATLAB software is added to Table 2. The results obtained from the probability of target detection for the proposed waveform are shown in Fig. 12. This section presents the analysis and evaluation of the proposed method for proposed waveform design based on simulation results to improve the detection rate. The significant superiority of the proposed method over the initial LFM waveform was shown, and reverberation suppression performance was significantly improved. It was revealed that the proposed waveform design could achieve target detection 20 dB better than the initial LFM waveform. In this way, the target detection with a wideband waveform was improved by the proposed combine method. Both the DS characteristic and the removal of frequency components proportional to the target speed significantly increased the detection probability relative to the LFM base waveform.

Block diagram of the waveform design echo simulation algorithm from the target in the presence of reverberation and extraction of ROC diagram

Simulation of received reverberation

The probability of target detection at 5 m/s versus the SRR
6 Conclusion
In this paper, the combined waveform design was proposed to improve target detection in shallow water environments appropriate to its speed range. In the proposed method, by selecting the number of N-frequency bands and each selected band's bandwidth with specific FH and initial frequency, the desired waveform can be designed for better detection. The Q function criterion indicates that the reverberation level in the target intended speed is 35 dB less than the LFM and GSFM waveforms. The designed waveform's ACF is at least 25 dB superior to another state of the art waveforms in the PSL ratio. Then, the waveform designed in the shallow underwater channel was simulated, and the probability of target detection was determined. It proved that the designed waveform could perform target detection in SSR = 20 dB less than the FM base waveform itself. Since the detection probabilities for the two HFM and LFM waveforms are almost the same, the detection of the HFM-based the designed waveform was 3 dB superior to the LFM-based waveform.
Therefore, using the bandwidth fragmentation technique makes it possible to increase the Pd of masked targets while maintaining the target range resolution. The proposed combined waveform design has several advantages. Firstly, by dividing the total bandwidth of the wideband waveform into pieces, the waveform is converted into separate amplitude with the ability to use codes such as PRN, complementary. Therefore, the PSL ratio decreases significantly, and the Doppler-sensitive feature is obtained in the waveform. Secondly, according to the lowest detectable reverberation level for the waveform designed in Q function, the transmitted power can be significantly reduced. An essential step towards silent sonar can be taken by waveform design. Third, the proposed algorithm for waveform design is a real-time implementation capability and significantly reduces the processing load in the receiver section for the wideband waveform. Fourth, in the proposed algorithm for applying the real underwater environment, after the initial detection of the target speed in proportion to the speed range, the waveform can be redesigned. The limitation that can be mentioned for the proposed algorithm is that the number of distinct amplitudes must be equal to the number of multiplied codes. The following propositions for research end up being presented in a shallow water environment: The usage of the proposed method for combining wideband waveforms with narrowband waveforms to detect targets with high range resolution, the ability to use the proposed algorithm in the flowchart to develop and improve the flexible waveform to update the waveform parameters in real-time, waveform design based on target speed to reduce the level of detectable reverberation in Q function, the usage of the proposed method to reduce the waveform's sidelobe level, and suppress the reverberation and to separate the targets from the reverberation. According to the findings of the research, the following propositions were presented for applying in other underwater applications: Classification of underwater target types according to the characteristics of the target's speed range of each category, employing the proposed algorithm for target tracking, simulation and analysis of the proposed waveform in the deep-sea channel model.
The proposed algorithm's superiority is a step into cognitive sonar by the speed of the target's previous state. Due to the flexible design of the proposed waveform in this paper, for the future and further research, it is suggested that design parameters can be optimized according to the shallow water environment conditions and the target to achieve the optimal waveform, and the next generation cognitive sonar based on the waveform can be developed. For example, researchers can investigate optimizing each of the BWs and FH parameters for cognitive sonar development. In addition, it is suggested that the designed waveform in the underwater experimental environment be evaluated and tested.
References
Hodges, R. P. (2011). Underwater acoustics analysis, design, and performance of SONAR (1st ed.). Hoboken: Wiley.
Li, Q. (2012). Digital sonar design in underwater acoustic. Heidelberg: Springer.
Blunt, S. D., & Mokole, E. L. (2016). An overview of radar waveform diversity. IEEE Aerospace and Electronic Systems Magazine, 31(11), 2–42.
Yao, Y., Zhao, J., & Wu, L. (2019). Cognitive design of radar waveform and the receive filter for multitarget parameter estimation. Journal of Optimization Theory and Applications, 181, 684–705.
Zhang, Y.-X., et al. (2017). Frequency-domain range sidelobe correction in stretch processing for wideband LFM radars. IEEE Transactions on Aerospace and Electronic Systems, 53(1), 111–121.
Nusenu, S. Y., Chen, H., & Wang, W.-Q. (2018). OFDM chirp radar for adaptive target detection in low grazing angle. IET Signal Process, 12(5), 613–619.
Levanon, N., Cohen, I., & Itkin, P. (2017). Complementary pair radar waveforms–evaluating and mitigating some drawbacks. IEEE A&E Systems Magazine, 32, 40–50.
Hague, D. A., & Buck, J. R. (2019). An experimental evaluation of the generalized sinusoidal frequency-modulated waveform for active sonar systems. The Journal of the Acoustical Society of America, 145, 3741.
Alaie, M. B., & Olamaei, S. A. (2020). Waveform design for TDM-MIMO radar systems. IEEE, Signal Processing, 167, 107307.
He, H., Li, J., & Stoica, P. (2012). Waveform design for active sensing systems: A computational approach (pp. 88–102). New York, NY: Cambridge University Press.
Song, J., Babu, P., & Palomar, D. P. (2016). Sequence design to minimize the weighted integrated and peak side lobe levels. IEEE Transactions on Signal Processing, 64(8), 2051–2064. https://doi.org/10.1109/TSP.2015.2510982.
Fan, W., Liang, J., Yu, G., So, H. C., & Lu, G. (2020). Minimum local peak side lobe level waveform design with correlation and/or spectral constrains. Signal Processing, 171, 107450.
Sankuru, S. P., & Babu, P. (2020). Designing the unimodular sequence with good auto-correlation properties via block majorization-minimization method. Signal Processing, 176, 107707.
Waite, A. D. (2001). Sonar for practising engineers (3rd ed.). Hoboken: Wiley.
Wang, F., Du, S., Sun, W., Huang, Q., & Su, J. (2017). A method of velocity estimation using composite hyperbolic frequency-modulated signals in active sonar. The Journal of the Acoustical Society of America, 141, 3117.
Polak, L., & Milos, J. (2020). Performance analysis of LoRa in the 2.4 GHz ISM band: Coexistence issues with Wi-Fi. Telecommunication Systems, 74, 299–309. https://doi.org/10.1007/s11235-020-00658-w.
Yin, J., Men, W., Han, X., & Guo, L. (2020). The integrated waveform for continuous active sonar detection and communication. IET Radar, Sonar & Navigation, 14(9), 1382–1390.
Zhang, Q., Lu, G., Zhang, C., et al. (2020). Development of arbitrary waveform torsional vibration signal generator. Telecommunication Systems. https://doi.org/10.1007/s11235-020-00692-8.
Deferrari, H., & Wylie, J. (2013). Ideal signals and processing for continuous active sonar. In Proceedings of the meetings on acoustics (pp. 55–58). Montreal, QC, Canada.
Huang, T., & Wang, T. (2019). Research on analyzing and processing methods of ocean sonar signals. In D. Gong, H. Zhu, & R. Liu, R. (Eds.), Selected topics in coastal research: Engineering, industry, economy, and sustainable development (pp. 208–212). Journal of Coastal Research, Special Issue No. 94.
Guan, C., Zhou, Z., & Zeng, X. (2019). Optimal waveform design using frequency modulated pulse trains for active sonar. Sensors, 19(1), 4262. https://doi.org/10.3390/s19194262.
Baggenstoss, P. M. (2013). Specular decomposition of active sonar returns using combined waveforms. IEEE Transactions on Aerospace and Electronic Systems, 49(4), 2509–2521.
Li, C.-X., Guo, M.-F., & Zhao, H.-F. (2020). An iterative deconvolution-time reversal method with noise reduction, a high resolution and sidelobe suppression for active sonar in shallow water environments. Sensors, 20, 2844.
Lee, S., & Lim, J. S. (2019). (2019) Reverberation suppression using non-negative matrix factorization to detect low-Doppler target with continuous wave active sonar. EURASIP Journal on Advances in Signal Processing, 1, 1–18. https://doi.org/10.1186/s13634-019-0608-6.
Hague, D. A., & Buck, J. R. (2017). The generalized sinusoidal frequency-modulated waveform for active sonar. IEEE Journal of Oceanic Engineering, 42(1), 109–123.
Hague, D. A. (2020). Adaptive transmit waveform design using multi-tone sinusoidal frequency modulation. arXiv preprint https://arxiv.org/abs/2002.10159. Accepted 24 February 2020.
Touati, N., Tatkeu, C., Chonavel, T., & Rivenq, A. (2016). Design and performance evaluation of new costas-based radar waveforms with pulse coding diversity. IET Radar, Sonar & Navigation, 10(5), 877–891.
Guan, C., Zhou, Z., & Zeng, X. (2020). A phase-coded sequence design method for active sonar. Sensors, 20, 4659.
Trider, R. C. (2012). Signal investigation for low-frequency active (LFA) sonar, defense research, and development. Canada—Atlantic.
Qian, Q., Cui, Y., Wang, H., et al. (2020). REPAIR: fragile watermarking for encrypted speech authentication with recovery ability. Telecommunication Systems. https://doi.org/10.1007/s11235-020-00684-8.
Jin, Y., Wang, H. Q., Jiang, W. D., & Zhuang, Z. W. (2013). Complementary based chaotic phase-coded waveforms design for MIMO radar. IET Radar, Sonar & Navigation, 7(4), 371–382.
Arora, K., Singh, J., & Randhawa, Y. S. (2020). A survey on channel coding techniques for 5G wireless networks. Telecommunication Systems, 73, 637–663. https://doi.org/10.1007/s11235-019-00630-3.
Abraham, D. A. (2019). Underwater acoustic signal processing modeling, detection, and estimation. Berlin: Springer.
Coxson, G. E. (2019). Biosonar inspiration for radar waveform design. The Journal of the Acoustical Society of America, 145, 1700.
Han, J., Zhan, L., & Leus, G. (2016). Partial FFT demodulation for MIMO-OFDM over time-varying underwater acoustic channels. IEEE Signal Processing Letters, 23(2), 282–286.
Zaytsev, G. V., & Khzmalyan, A. D. (2020). A family of optimal window functions for spectral analysis with the spectrum sidelobe falloff rate multiple of 12 dB per octave. Journal of Communications Technology and Electronics, 65, 502–515.
Levanon, N., & Mozeson, E. (2004). Radar signals (1st ed.). Hoboken, NJ: Wiley. https://doi.org/10.1002/0471663085 (ISBN 9780471663089).
Etter, P. C. (2013). Underwater acoustic modeling and simulation (4th ed.). London: E&FN SPON.
Chotiros, N. P. (2010). Non-Rayleigh distributions in underwater acoustic reverberation in a patchy environment. IEEE Journal of Oceanic Engineering, 35(2), 236–241.
Lee, W.-J., & Stanton, T. K. (2016). Statistics of broadband echoes: Application to acoustic estimates of numerical density of fish. IEEE Journal of Oceanic Engineering, 41(3), 709–723.
Mahafza, B. R. (2013). Radar systems analysis and design using Matlab. Boca Raton: CRC Press.
Bessemer, M., Djebbar, A. B., Zouggaret, A., et al. (2020). Joint channel estimation and data detection for OFDM based cooperative system. Telecommunication Systems, 73, 545–556. https://doi.org/10.1007/s11235-019-00622-3.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Pakdel Azar, O., Amiri, H. & Razzazi, F. Enhanced target detection using a new combined sonar waveform design. Telecommun Syst 77, 317–334 (2021). https://doi.org/10.1007/s11235-021-00761-6
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11235-021-00761-6