
Abstract
This paper studies bright highly dispersive optical solitons that are with nonlocal type of nonlinearity. The numerical scheme, adopted in the paper, is Laplace-Adomian method. The analytical results, reported earlier, and the numerical results from the current work, agree with an impressively small error measure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
One of the featured concepts that was introduced during 2019 is highly dispersive (HD) optical solitons. This happens when in addition to chromatic dispersion (CD), the effects of inter-modal dispersion (IMD), third-order dispersion (3OD), fourth order dispersion (4OD), fifth order dispersion (5OD) and sixth-order dispersion (6OD) effects are all included. This leads to solitons to the governing nonlinear Schrödinger’s equation. There are only four forms of nonlinear refractive index that leads to the retrieval of closed form of a soliton solution (Alshaery et al. 2014; Biswas et al. 2019a, b, c, d, e, f, 2020; Kara et al. 2018; Kohl et al. 2019a, 2020a, b; Kudryashov 2020a, b, c, d; Vega-Guzman et al. 2014; Yanan et al. 2013; Yildirim et al. 2020). These are Kerr law, quadratic-cubic law, non-local law and polynomial law. Today’s paper will study HD solitons, with nonlocal nonlinear form, in polarization-preserving optical fibers.
In this context, it must be noted that with the effect of higher order dispersions, one will naturally encounter the effect of soliton radiation that will lead to the shedding of energy. However, these effects have been discarded and the solitons only in the discrete regime with bound states have been studied. Our numerical scheme is the Laplace-Adomian algorithm that studies bright optical solitons and the accuracy of the scheme is depicted in the error plots are exhibited with impressive measure. After a quick revisitation of the governing model and the algorithmic scheme, the results are enumerated and displayed.
2 Governing equation
The nonlinear Schrödinger’s equation (NLSE) for highly dispersive optical solitons in the presence of a non-local nonlinearity is given by Biswas et al. (2019g, h, i, j), Rehman et al. (2019) and Kohl et al. (2019b):
where \(q=q(x,t)\) is a complex-valued function of x (space) and t (time). In Eq. (1), the first term stands for linear temporal evolution with \(i=\sqrt{-1}\). The next six terms are dispersion terms that make the solitons highly dispersive. These are given by the coefficients of \(a_k\) for \(1\le k\le 6\) which are inter-modal dispersion (IMD), group velocity dispersion (GVD), third-order dispersion (3OD), fourth-order dispersion (4OD), fifth-order dispersion (5OD) and sixth-order dispersion (6OD) respectively. Finally, b is the coefficient of non-local nonlinearity.
2.1 Bright highly dispersive optical solitons
The bright highly dispersive optical soliton solution to (1) was recently reported in Biswas et al. (2019g), using the extended Jacobi’s elliptic function scheme the authors obtain
In Eq. (2), where \(\nu\) is the speed of the wave, \(\omega\) is its wave number, \(\kappa\) is the soliton frequency and \(\theta _0\) is the phase center constant.
In Biswas et al. (2019g, h), the parameters and constraints for the highly dispersive optical soliton are given by:
-
(a)
The relationship between the system parameters are:
$$\begin{aligned}&\omega =\frac{1260a_{1}\kappa +b\beta _{2}^{2}(25\kappa ^{6}-336\kappa ^{4}+560\kappa ^{2}+768m^{3}+80(7\kappa ^{2}+36)m^{2}-16ml_{1}+768)}{1260}, \end{aligned}$$(3)$$\begin{aligned}&a_{4}=-\frac{b\beta _{2}^{2}(-75\kappa ^{2}+112(m+1))}{1260}, \qquad \nu =a_{1}-2\kappa (a_{2}+4a_{4}\kappa ^{2}+8a_{5}\kappa ^{3}),\quad A=\beta _{2}m, \end{aligned}$$(4)$$\begin{aligned}&a_{2}=-\frac{b\beta _{2}^{2}(75\kappa ^{4}-672\kappa ^{2}+560m^{2}-112(6\kappa ^{2}+35)m)+560)}{1260}, \end{aligned}$$(5)where
$$\begin{aligned} \beta _{2}^{2}=-\frac{252a_6}{b},\qquad l_{1}=21\kappa ^{4}+245\kappa ^{2}-180, \end{aligned}$$and m is any parameter that satisfies the Eqs. (3), (4) and (5).
-
(b)
The constraint condition are
$$\begin{aligned} a_{5}=6a_{6}\kappa ,\qquad a_{3}=\frac{4}{3}\kappa (3a_{4}+5a_{5}\kappa )\qquad \text{ and }\qquad a_{6}b< 0. \end{aligned}$$(6)
3 Description of the method applied
The aim of this section is to discuss the use of the Laplace-Adomian decomposition method (LADM) and its algorithm to solve the NLSE (1). The present method was first proposed in Adomian (1994) and Khuri (2001).
Let us look for soliton solutions of Eq. (1) in the form \(q(x,t)=u(x,t)+iv(x,t)\). Then we can decompose the Eq. (1) in its real and imaginary parts, respectively as
In order to find analytical approximate solutions for Eq. (1) using LADM, we first rewrite the Eqs. (7) and (8) in the following operator form
with initial conditions \(u(x,0)=\mathfrak {R}e (q(x,0))\) and \(v(x,0)=\mathfrak {I}m (q(x,0))\).
In the equations system (9)–(10) the operator \(D_{t}\) denotes derivative with respect to t, whereas that \(D^{j}_{x}\) is the \(j-\)th order linear differential operator \(\frac{\partial ^{j}}{\partial x^j}\) and \(N_k\) represents nonlinear differential operators for \(k=1,2\).
The method consists of first applying the Laplace transform \({\mathscr {L}}\) to both sides of equations in system (9)–(10) and then by using initial conditions, we have
Now, applying inverse Laplace transform \({\mathscr {L}}^{-1}\) and initial conditions to system (11) and (12), we get
Now we represent the unknown functions u and v by an infinite series of the form
In addition, the nonlinear terms can be written as
and
where \(A_n\) and \(B_n\) are the Adomian’s polynomials (Rach 1984; Wazwaz 2000), which are defined by
On making the substitution of Eqs. (15) and (16) into Eqs. (13) and (14), we can arrive at
In general, the recursive relations are given by
With the help of the above procedure first few terms of Adomian polynomials \(A_n\) and \(B_n\) can be obtained as
and
Using Eqs. (22) and (23) through the LADM method, we obtain the next recursive algorithm for the real and imaginary part of solution q(x, t), respectively.
The approach introduced above will illustrated through examples in the following section. All our computations are performed by MATHEMATICA software package (Mangano 2010).
4 Numerical simulations
To illustrate the ability, reliability and the accuracy of the proposed method for find solutions of Eq. (1) in the case of bright highly dispersive optical solitons in the presence of a non-local nonlinearity, some examples are provided. The results reveal that the method is very simple to use and highly efficient.
We now consider the initial condition at \(t=0\) from Eq. (2)
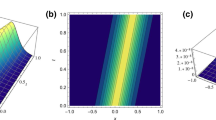
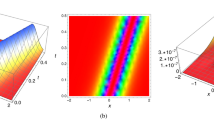
We now perform the simulation of the four cases listed in Table 1 and the results obtained as well as the absolute errors are shown in Figs. 1, 2, 3 and 4.

Numerically computed bright highly dispersive optical soliton (a), corresponding density plot (b) and absolute error (c) for case I

Numerically computed bright highly dispersive optical soliton (a), corresponding density plot (b) and absolute error (c) for case II

Numerically computed bright highly dispersive optical soliton (a), corresponding density plot (b) and absolute error (c) for case III

Numerically computed bright highly dispersive optical soliton (a), corresponding density plot (b) and absolute error (c) for case IV
5 Conclusions
Today’s paper retrieved HD bright optical solitons by the aid of LADM. The numerical scheme also yielded the error estimates of the approximations. These error measures stand very impressive. The simulations with bright solitons are exhibited for nonlocal form of nonlinearity. These results will now be extended to birefringent fibers with nonlocal law of nonlinearity where LADM will be implemented to demonstrate the numerics in it. In future, the mode will also be studied with additional forms of nonlinear media in the context of birefringent fibers and these would include Kerr law, quadratic-cubic law and polynomial law. The results of those research activities would be reported with time.
References
Adomian, G.: Solving Frontier Problems of Physics: The Decomposition Method. Kluwer, Boston (1994)
Alshaery, A.A., Hilal, E.M., Banaja, M.A., Alkhateeb, S.A., Moraru, L., Biswas, A.: Optical solitons in multiple-core couplers. J. Optoelectron. Adv. Mater. 16, 750–758 (2014)
Biswas, A., Vega-Guzman, J., Mahmood, M.F., Khan, S., Ekici, M., Zhou, Q., Moshokoa, S.P., Belic, M.R.: Highly dispersive optical solitons with undetermined coefficients. Optik 182, 890–896 (2019a)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with quadratic-cubic law by F-expansion. Optik 182, 930–943 (2019b)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with non- local nonlinearity by F-expansion. Optik 186, 288–292 (2019c)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with cubic- quintic-septic law by F-expansion. Optik 182, 897–906 (2019d)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with cubic- quintic-septic law by exp-expansion. Optik 186, 321–325 (2019e)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with cubic- quintic-septic law by extended Jacobi’s elliptic function expansion. Optik 183, 571–578 (2019f)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with non-local nonlinearity by extended Jacobi’s elliptic function expansion. Optik 184, 277–286 (2019g)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with non-local nonlinearity by \(F-\)expansion. Optik 183, 1140–1150 (2019h)
Biswas, A., Kara, A.H., Alshomrani, A.S., Ekici, M., Zhou, Q., Belic, M.R.: Conservation laws for highly dispersive optical solitons. Optik 199, 163283 (2019i)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with Kerr law nonlinearity by F-expansion. Optik 181, 1028–1038 (2019j)
Biswas, A., Ekici, M., Sonmezoglu, A., Belic, M.R.: Highly dispersive optical solitons with kerr law nonlinearity by extended Jacobi’s elliptic function expansion. Optik 183, 395–400 (2019k)
Biswas, A., Kara, A.H., Zhou, Q., Alzahrani, A.K., Belic, M.R.: Conservation laws for highly dispersive optical solitons in birefringent fibers. Regul. Chaotic Dyn. 25, 166–177 (2020)
Kara, A.H., Biswas, A., Zhou, Q., Moraru, L., Moshokoa, S.P., Belic, M.R.: Conservation laws for optical solitons with Chen-Lee-Liu equation. Optik 174, 195–198 (2018)
Khuri, S.A.: A Laplace decomposition algorithm applied to class of nonlinear differential equations. J. Math. Appl. 4, 141–155 (2001)
Kohl, R.W., Biswas, A., Ekici, M., Zhou, Q., Khan, S., Alshomrani, A.S., Belic, M.R.: Highly dispersive optical soliton perturbation with cubic-quintic-septic refractive Index by semi-inverse variational principle. Optik 199, 163322 (2019a)
Kohl, R.W., Biswas, A., Ekici, M., Zhou, Q., Khan, S., Alshomrani, A.S., Belic, M.R.: Highly dispersive optical soliton perturbation with Kerr law by semi-inverse variational principle. Optik 199, 163226 (2019b)
Kohl, R.W., Biswas, A., Ekici, M., Yildirim, Y., Triki, H., Alshomrani, A.S., Belic, M.R.: Highly dispersive optical soliton perturbation with quadratic-cubic refractive Index by semi-inverse variational principle. Optik 206, 163621 (2020a)
Kohl, R.W., Biswas, A., Ekici, M., Zhou, Q., Khan, S., Alshomrani, A.S., Belic, M.R.: Sequel to highly dispersive optical soliton perturbation with cubic-quintic-septic refractive index by semi-inverse variational principle. Optik 203, 163451 (2020b)
Kudryashov, N.A.: Dispersive solitary wave solutions of perturbed nonlinear Schrödinger equation. Appl. Math. Comput. 371, 124972 (2020a)
Kudryashov, N.A.: Solitary wave solutions of hierarchy with non-local nonlinearity. Appl. Math. Lett. 103, 106155 (2020b)
Kudryashov, N.A.: Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 206, 163550 (2020c)
Kudryashov, N.A.: Highly dispersive optical solitons of the generalized nonlinear eighth-order Schrödinger equation. Optik 206, 164335 (2020d)
Mangano, S.: Mathematica Cookbook. O’Reilly Media, Sebastopol (2010)
Rach, R.: A convenient computational form for the Adomian polynomials. J. Math. Anal. Appl. 102, 415–419 (1984)
Rehman, H.U., Ullah, N., Imran, M.A.: Highly dispersive optical solitons using Kudryashov’s method. Optik 199, 163349 (2019)
Vega-Guzman, J., Alshaery, A.A., Hilal, E.M., Bhrawy, A.H., Mahmood, M.F., Moraru, L., Biswas, A.: Optical soliton perturbation in magneto-optic waveguides with spatio-temporal dispersion. J. Optoelectron. Adv. Mater. 16, 1063–1070 (2014)
Wazwaz, A.M.: A new algorithm for calculating Adomian polynomials for nonlinear operators. Appl. Math. Comput. 111, 33–51 (2000)
Yanan, X., Jovanoski, Z., Bouasla, A., Triki, H., Moraru, L., Biswas, A.: Optical solitons in multi-dimensions with spatio-temporal dispersion and non-kerr law nonlinearity. J. Nonlinear Opt. Phys. Mater. 22, 1350035 (2013)
Yildirim, Y., Biswas, A., Ekici, M., Zayed, E.M.E., Khan, S., Moraru, L., Alzahrani, A.K., Belic, M.R.: Highly dispersive optical solitons in birefringent fibers with four forms of nonlinear refractive index by three prolific integration schemes. Optik 220, 165039 (2020)
Acknowledgements
This project was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah, Saudi Arabia under Grant No. (KEP-15-130-40). The fourth author, therefore, acknowledges with thanks DSR technical and financial support.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
González-Gaxiola, O., Biswas, A., Asma, M. et al. Highly dispersive optical solitons with non-local law of refractive index by Laplace-Adomian decomposition. Opt Quant Electron 53, 55 (2021). https://doi.org/10.1007/s11082-020-02679-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-020-02679-w