
Abstract
This paper studies highly dispersive bright and dark optical solitons from a numerical perspective by variational iteration method. This is a very efficient algorithm that has gained popularity to numerically address model equations from a range of physical phenomena including photonics sciences. The current paper studies highly dispersive optical soliton solutions that are considered with quadratic–cubic nonlinear form of refractive index, modeled by the nonlinear Schrödinger’s equation. The novelty of this approach is that it recovers bright and dark soliton solutions to the model numerically, and the error of approximation has also been presented. The algorithm displays the solutions with an impressive error measure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Optical solitons have left a lasting impression in the field of telecommunications. There are a variety of concepts that stem from soliton studies that are currently studied. A few of them are dispersion-managed solitons, Bragg gratings, pure–cubic solitons, pure–quartic solitons, cubic–quartic solitons, highly dispersive (HD) solitons, quasi-linear pulses and several others. One of the concepts that have been recently proposed and have gained a lot of attention is HD solitons. This kind of solitons has been extensively studied with a variety of forms of nonlinear refractive index [1,2,3,4,5,6,7,8,9,10,11,12]. This study has also been extended to the case of birefringent fibers [13,14,15,16,17,18,19,20,21,22,23,24]. The conservation laws have been reported for HD solitons. Moreover, perturbed HD soliton solutions have been studied by the semi-inverse variational principle [25, 26]. The current paper will address HD optical solitons by the aid of variational iteration method (VIM). The governing equation is the nonlinear Schrodingers equation with intermodal dispersion (IMD), chromatic dispersion (CD), third-order dispersion (3OD), fourth-order dispersion (4OD), fifth-order dispersion (5OD) and sixth-order dispersion (6OD). The law of nonlinear refractive index is quadratic–cubic (QC) type. The numerical scheme is exhibited in the subsequent section along with an impressive error measure which exposes the efficiency and accuracy of the numerical scheme. Both bright and dark soliton solutions are studied today.
Model description
The nonlinear Schrödinger’s equation (NLSE) for highly dispersive optical solitons in polarization-preserving fibers with the quadratic–cubic law is given by [4, 11, 27,28,29]:
where \(q=q(x,t)\) is a complex-valued function of x (space) and t (time). In Eq. (1), the first term stands for linear temporal evolution with \(i=\sqrt{-1}\). The next six terms are dispersion terms that make the solitons highly dispersive. These are given by the coefficients of \(a_k\) for \(1\le k\le 6\) which are IMD, CD, 3OD, 4OD, 5OD and 6OD, respectively. Finally, the constants \(b_1\) and \(b_2\) are coefficients of the quadratic and cubic terms, respectively.
It must be noted that the model equ. (1) produces substantial radiation that will shed the energy of the soliton as it propagates down the fiber. However, soliton radiation is not considered in this paper. These can be studied by the aid of “variational principle” or “beyond all-order asymptotics” or by the implementing the “theory of unfoldings,” and they can be independently addressed in a different research publication. Another aspect that has been excluded from this study is the issue of collision-induced timing jitter of intra-channel collision that can be controlled by quasi-particle theory. Today’s paper stays focused on the core of the soliton in a polarization-preserving fiber.
Summary of variational iteration method (VIM)
The variational iteration method transforms the differential equation to a recurrence sequence of functions, and the limit of the sequence, if exists, is considered as the solution of the differential equation. Consider the following nonlinear partial differential equation:
where \(L=\frac{\partial }{\partial t}\), R and N are linear and nonlinear operators, respectively, and h(x, t) is an inhomogeneous term (or source). The variational iteration method admits the use of the correction functional for Eq. (2) which can be written as
where \(\lambda (\xi )\) is a general Lagrange multiplier, which can be identified optimally via the variational theory [30,31,32,33] and \({\tilde{w}}_{n}\) is considered as a restricted variation, i.e., \(\delta {\tilde{w}}_{n}=0.\)
According to the variational iteration method, the terms of a sequence \(\{w_n\}\) are constructed such that this sequence converges to the exact solution. The successive approximations \(w_{n+1}\), \(n\ge 0\), of the solution w will be readily obtained by suitable choice of trial function \(w_0\). Consequently, the solution is given as
The VIM was proved by many to be very effective and can be used in a direct manner without any need to linearization of the nonlinear terms that may change the physical feature of the problem. As we have said before, we will use the VIM to determine bright and dark optical solitons for the NLSE with the quadratic–cubic law (1) for a variety of given initial conditions.
Implementation of the proposed method to the model (1)
Substituting \(q(x, t) = u(x, t) + iv(x, t)\), where u(x, t) and v(x, t) are real functions of x and t, in Eq. (1), results in the following coupled system of partial differential equations
with the following initial conditions
According to Eq. (3), the variational iteration algorithm for the problem (5) with the following initial conditions (6) has the form
where \(\lambda _{1}(\tau )\) and \(\lambda _{2}(\tau )\) are general Lagrange multipliers. Moreover,
and
denote restricted variations, i.e.
and
Making the above correction functionals stationary, we obtain the following stationary conditions:
Therefore, the Lagrange multipliers can be identified as \(\lambda _{1}(\tau )=\lambda _{2}(\tau )=-1\). Substituting this value of the Lagrangian multiplier into functional Eq. (7) gives the iterative formulas
where \(n\ge 0\) and \(u_{0}(x,t)=u(x,0)\), \(v_{0}(x,t)= v(x,0).\) The VIM solutions u(x, t) and v(x, t) can be expressed as
where \(u_n\) and \(v_n\) will be determined recursively.
Application to bright highly dispersive solitions
We first consider the nonlinear Schrödinger Eq. (1) with the initial condition
Here we will use the initial condition as derived in [13] and \(\alpha _j\), \(\beta _j\) and \(\gamma _j\) are constants related to system coefficients (5) for every \(j=1,2\).
The correction functionals for (5) are given as in Eq. (9). Consequently, we obtain the successive approximations as follows:
Application to dark highly dispersive solitions
We first consider the nonlinear Schrödinger Eq. (1) with the initial condition
Here we will use the initial condition as derived in [13] and \(\alpha _j\), \(\beta _j\) and \(\gamma _j\) are constants related to system coefficients (5) for every \(j=1,2\).
The correction functionals for (5) are given as in Eqs. ((9)). Consequently, we obtain the successive approximations as follows:
The approach introduced above will illustrated through examples in the following section.
Numerical experiments and graphical results
In this section, we consider some different cases for the nonlinear Schrödinger equation with the quadratic–cubic law given in (1) to illustrate the application of the VIM scheme we presented in the above section. The numerical solutions will be obtained, and the results will be graphically illustrated. In all these examples, software MATHEMATICA version 11 has been used for calculations and graphs.
Bright highly dispersive solitons
The result and the profile of two cases are graphically illustrated in Table 1 and in Figs. 1, 2, and 3.
Dark highly dispersive solitons
The result and the profile of two cases are graphically illustrated in Table 2 and in Figs. 4, 5, and 6.

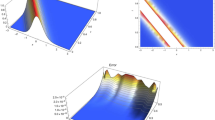
Numerically computed bright highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case B-1

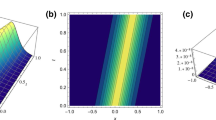
Numerically computed bright highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case B-2

Numerically computed bright highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case B-3

Numerically computed dark highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case D-1

Numerically computed dark highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case D-2

Numerically computed dark highly dispersive soliton (a), corresponding density plot (b) and absolute error (c) for case D-3
Conclusions
This paper studied HD optical solitons by VIM where the nonlinear refractive index is of QC type. The adopted numerical scheme displayed surface plots and the error graphs that are of the order of \(10^{-9}\). The error measure stands impressively small. The results of this manuscript are therefore strongly encouraging to look at HD solitons that appear with additional forms of refractive index. Later, HD solitons will be addressed in birefringent fibers for a variety of nonlinear refractive index. These results are currently awaited and will be disseminated across a variety of journals. In future, several additional models that describe soliton dynamics will also be addressed numerically. These include Kudryashovs equation, Chen–Lee–Liu equation, Kaup–Newell equation, Gerdjikov–Ivanov equation, Lakshmanan–Porsezian–Daniel model and several others. These are all in the bucket list for now.
References
S. Nandy, V. Lakshminarayanan, Adomian decomposition of scalar and coupled nonlinear Schrödinger equations and dark and bright solitary wave solutions. J. Opt. 44, 397–404 (2015)
A. Biswas, J. Vega-Guzman, M.F. Mahmood, S. Khan, M. Ekici, Q. Zhou, S.P. Moshokoa, M.R. Belic, Highly dispersive optical solitons with undetermined coefficients. Optik 182, 890–896 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with Kerr law nonlinearity by F-expansion. Optik 181, 1028–1038 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with quadratic-cubic law by F-expansion. Optik 182, 930–943 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with Kerr law nonlinearity by extended Jacobi’s elliptic function expansion. Optik 183, 395–400 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with non-local nonlinearity by extended Jacobi’s elliptic function expansion. Optik 184, 277–286 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with non-local nonlinearity by F-expansion. Optik 186, 288–292 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with cubic-quintic-septic law by F-expansion. Optik 182, 897–906 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with cubic-quintic-septic law by exp-expansion. Optik 186, 321–325 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with cubic-quintic-septic law by extended Jacobi’s elliptic function expansion. Optik 183, 571–578 (2019)
A. Biswas, A.H. Kara, A.S. Alshomrani, M. Ekici, Q. Zhou, M.R. Belic, Conservation laws for highly dispersive optical solitons. Optik 199, 163283 (2019)
A. Biswas, A.H. Kara, Q. Zhou, A.K. Alzahrani, M.R. Belic, Conservation laws for highly dispersive optical solitons in birefringent fibers. Regul. Chaotic Dyn. 25, 166–177 (2020)
Y. Yildirim, A. Biswas, M. Ekici, E.M.E. Zayed, S. Khan, L. Moraru, A.K. Alzahrani, M.R. Belic, Highly dispersive optical solitons in birefringent fibers with four forms of nonlinear refractive index by three prolific integration schemes. Optik 220, 165039 (2020)
Y. Yildirim, A. Biswas, P. Guggilla, O. González-Gaxiola, M. Ekici, A.K. Alzahrani, M.R. Belic, Exhibit of highly dispersive optical solitons in birefringent fibers with four forms of nonlinear refractive index by exp-function expansion. Optik 208, 164471 (2020)
E.M.E. Zayed, R.M.A. Shohib, M.M. El-Horbaty, A. Biswas, Y. Yildirim, A.S. Alshomrani, M.R. Belic, Optical solitons in birefringent fibers with quadratic-cubic refractive index by \(\phi ^6-\)model expansion. Optik 202, 163620 (2020)
L. Song, Z. Yang, S. Zhang, X. Li, Spiraling anomalous vortex beam arrays in strongly nonlocal nonlinear media. Phys. Rev. A 99, 063817 (2019)
R. Guo, R.R. Jia, Rogue wave solutions for the \((2+1)-\)dimensional complex modified Korteweg-de Vries and Maxwell-Bloch system. Appl. Math. Lett. 105, 106284 (2020)
soliton control and soliton interaction, Nonautonomous solitons in modified inhomogeneous Hirota equation. Nonlinear Dyn. 79, 2469–2484 (2015)
M.S. Mani Rajan, A. Mahalingam, Multi-soliton propagation in a generalized inhomogeneous nonlinear Schrödinger-Maxwell-Bloch system with loss/gain driven by an external potential. J. Mathem. Phys. 54(4), 043514 (2013)
M.S. Mani Rajan, A. Mahalingam, A. Uthayakumar, Nonlinear tunneling of nonautonomous optical solitons in combined nonlinear Schrödinger-Maxwell-Bloch systems. J. Opt. 14(10), 105204 (2012)
M.S. Mani Rajan, A. Mahalingam, A. Uthayakumar, K. Porsezian, Observation of two soliton propagation in an erbium doped inhomogeneous lossy fiber with phase modulation. Commun. Nonlinear Sci. Numer. Simul. 18(6), 1410–1432 (2013)
M.S. Mani Rajan, J. Hakkim, A. Mahalingam, A. Uthayakumar, Dispersion management and cascade compression of femtosecond nonautonomous soliton in birefringent fiber. Eur. Phys. J. D 67(7), 150 (2013)
M.S. Mani Rajan, Dynamics of optical soliton in a tapered erbium-doped fiber under periodic distributed amplification system. Nonlinear Dyn. 85(1), 599–606 (2016)
M.S. Mani Rajan, A. Mahalingam, A. Uthayakumar, Nonlinear tunneling of optical soliton in 3 coupled NLS equation with symbolic computation. Ann. Phys. 346, 1–13 (2014)
R.W. Kohl, A. Biswas, M. Ekici, Q. Zhou, S. Khan, A.K. Alzahrani, M.R. Belic, Highly dispersive optical soliton perturbation with Kerr law nonlinearity by semi-inverse variational principle. Optik 199, 163226 (2019)
R.W. Kohl, A. Biswas, M. Ekici, Q. Zhou, S. Khan, A.K. Alzahrani, M.R. Belic, Highly dispersive optical soliton perturbation with cubic-quintic-septic refractive index by semi-inverse variational principle. Optik 199, 163322 (2019)
A. Biswas, M. Ekici, A. Sonmezoglu, M.R. Belic, Highly dispersive optical solitons with quadratic-cubic law by exp-function. Optik 186, 431–435 (2019)
N.A. Kudryashov, Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 206, 163550 (2020)
R.W. Kohl, A. Biswas, M. Ekici, Y. Yildirim, H. Triki, A.S. Alshomrani, M.R. Belic, Highly dispersive optical soliton perturbation with quadratic-cubic refractive Index by semi-inverse variational principle. Optik 206, 163621 (2020)
J.H. He, Variational iteration method -a kind of non-linear analytical technique: Some examples. Int. J. Nonlinear Mech. 34, 699–708 (1999)
J.H. He, X.H. Wu, Construction of solitary solution and compacton like solution by variational iteration method. Chaos, Solitons & Fractals 29, 108–113 (2006)
S. Momani, S. Abuasad, Application of He’s variational iteration method to Helmholtz equation. Chaos Solitons & Fractals 27, 1119–1123 (2006)
A.M. Wazwaz, The variational iteration method for rational solutions for KdV, Burgers and cubic Boussinesq. J. Comput. Appl. Math. 1, 18–23 (2007)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
González-Gaxiola, O., Biswas, A., Ekici, M. et al. Highly dispersive optical solitons with quadratic–cubic law of refractive index by the variational iteration method. J Opt 51, 29–36 (2022). https://doi.org/10.1007/s12596-020-00671-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12596-020-00671-x