
Abstract
In this paper, we investigate the impulsive control and synchronization of a new unified hyperchaotic system. This new system unifies both the hyperchaotic Lorenz system and the hyperchaotic Chen system. Some conditions are given to guarantee the global asymptotic stability of the controlled and synchronized system. The control gains and impulsive intervals are both variable. Moreover, we estimate the upper bound of impulsive interval for stable control and synchronization. Simulations are included to show the effectiveness of the theoretical results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Compared to most other methods of chaos control and synchronization, the main advantages of impulsive method are that [1–3]: (1) it allows the control and synchronization of a chaotic system by using only small control impulses at discrete instants; (2) it provides an efficient technology to deal with systems which cannot endure continuous disturbance; (3) since only impulses at discrete instants are needed, it is more efficient, secure, and thus useful in many applications, especially for secure communication [4, 5]. In addition, there exist many examples of impulsive control systems in practice, such as the population control system of insects, some chemical reactors, financial systems [6], and neural networks [7].
Because of the above facts, many impulsive control and synchronization methods for a chaotic system have been presented. In [8], robustness of the continuous differential system was used to explain the mechanics of impulsive synchronization. Yang et al. used the theory of comparison system and impulsive differential equations to study the stabilization and synchronization of Lorenz system in [9] and [10], respectively. Sun et al. presented a new comparison theorem for asymptotic stability of impulsive differential system [11], which was used to study the synchronization of Lorenz system [12] and the control of chaotic Rössler system [13]. Some sufficient conditions for asymptotic stability of impulsive system are given in [14], and the results have been used to stable and synchronize Lorenz [15] and unified chaotic system [16]. Based on linear matrix inequality, the impulsive synchronization of chaotic system was investigated in [17]. In [18], Iton et al. studied the impulsive control for synchronization of some continuous systems under the assumption that the synchronization errors are sufficiently small. Hu et al. researched the projective synchronization of Lorenz system via impulsive control in [19]. Zhang et al. investigated the problem of impulsive lag synchronization for a class of nonlinear discrete chaotic systems [20]. The impulsive synchronization with parametric mismatch was studied in [21, 22]. Itoh et al. presented some experimental results on impulsive synchronization of chaotic circuits in [23], which suggests that various applications of impulsive control and synchronization of chaotic system are feasible. Some other research results can be found in [24–26]. However, few of the above mentioned methods consider the case where both control gains and impulsive intervals are variable.
Hyperchaotic phenomenon has been observed and analyzed in some models [27–30], and some synchronization methods of the hyperchaotic system without impulsive technology have been presented [31, 32]. Unified hyperchaotic system, which was presented by the authors in a previous paper [33], contains the hyperchaotic Lorenz system and the hyperchaotic Chen system as two dual systems at the two extremes of its parameter spectrum. The system is hyperchaotic over almost the whole parameter range, and can realize continued transition from the hyperchaotic Lorenz system to the hyperchaotic Chen system. Its dynamic behavior is more complex than other chaotic and hyperchaotic systems. Therefore, in the field of secure communication, the control and synchronization of this system probably has more significance than other chaotic (hyperchaotic) systems.
In this paper, based on the Lyapunov stability theory and the comparison theorem, we propose an impulsive law with variable control gains and impulsive intervals to achieve the control and synchronization of the unified hyperchaotic system. The rest of the paper is organized as follows. We review some basic theory in Sect. 2. The impulsive control and synchronization theorems of the system are investigated in Sects. 3 and 4, respectively. Section 5 gives numerical simulations. Conclusions and acknowledgements are given in the final section.
2 Basic theory of impulsive differential equations
Let a general system be in the form of \(\dot{\boldsymbol{x}} = \boldsymbol{f}(t,\boldsymbol {x})\), where f:R +×R n↦R n is continuous, x∈R n is the state variable. Discrete set {τ i } of time instants satisfies 0<τ 1<τ 2<⋯<τ i <τ i+1<⋯,τ i →∞ as i→∞.
\(U(i,\boldsymbol{x})=\Delta\boldsymbol{x} \mid_{t=\tau_{i}}\triangleq\boldsymbol{x}(\tau _{i}^{+})-\boldsymbol{x}(\tau_{i}^{-})\) is the state variable at instant τ i , then an impulsive differential system in which impulses occur at fixed times is described by
Equation (1) is also called impulsive differential equation. To make the paper self-contained, we recall the following definitions and theorems [6].
Definition 1
Let V:R +×R n↦R +, then V is said to belong to class \(\mathcal{V}_{0}\) if
-
1.
V is continuous in (τ i−1,τ i ]×R n and for each x∈R n, \(i=1,2,\ldots,\lim_{(t,\boldsymbol{y}) \to(\tau_{i}^{+},\boldsymbol {x})}V(t,\boldsymbol{y})=V(\tau_{i}^{+},\boldsymbol{x})\) exists;
-
2.
V is locally Lipschitzian in x.
Definition 2
For (t,x)∈(τ i−1,τ i ]×R n, we define \(D^{+}V(t,\boldsymbol{x})\triangleq \limsup_{h\to0}\frac{1}{h}[V(t+h,\boldsymbol {x}+h\boldsymbol{f}(t,\boldsymbol{x}))-V(t,\boldsymbol{x})]\).
Definition 3
(Comparison system)
Let \(V\in\mathcal{V}_{0}\) and assume that
where g:R +×R +↦R is continuous and ψ i :R +↦R + is nondecreasing. Then the following system
is the comparing system of Eq. (1).
Definition 4
A function α is said to belong to class \(\mathcal{K}\) if \(\alpha \in\mathcal{C}[\boldsymbol{R}_{+},\boldsymbol{R}_{+}]\), α(0)=0 and α(x) is strictly increasing in x.
Let S ρ ={x∈R n∣∥x∥<ρ}, where ∥⋅∥ denotes the Euclidean norm on R n. Assume that f(t,0)=0, U(i,0)=0 and g(t,0)=0 for all i. Then the following comparing theorems offer sufficient conditions for stability criteria.
Theorem 1
[6]
Assume that the following three conditions are satisfied,
-
1.
V:R +×S ρ ↦R +, ρ>0, \(V\in\mathcal{V}_{0}\), D + V(t,x)≤g(t,V(t,x)), t≠τ i .
-
2.
There exists a ρ 0>0 such that \(\boldsymbol{x}\in S_{\rho _{0}}\) implies that \(\boldsymbol{x}+U(i,\boldsymbol{x})\in S_{\rho_{0}}\) for all i, and V(t,x+U(i,x))≤ψ i (V(t,x)), t=τ i , \(\boldsymbol{x}\in S_{\rho_{0}}\).
-
3.
β(∥x∥)≤V(t,x)≤α(∥x∥) on R +×S ρ , where \(\alpha,\beta\in\mathcal{K}\).
Then the stability properties of the trivial solution ω=0 of Eq. (3) imply the corresponding stability properties of the trivial solution x=0 of Eq. (1).
Theorem 2
[6]
Let \(g(t,\omega)=\dot{\zeta}(t)\omega\), \(\zeta\in \mathcal{C}^{1}[\boldsymbol{R}_{+},\boldsymbol{R}_{+}]\), ψ i (ω)=d i ω, d i ≥0 for all i, then the origin of system (1) is asymptotically stable if conditions
and \(\dot{\zeta}(t)\geq0\) are satisfied.
3 Impulsive control of unified hyperchaotic system
The unified hyperchaotic system presented by authors [33] recently is described by
where a∈[0,1]. System (5) unified the hyperchaotic Lorenz system (when a=0) and the hyperchaotic Chen system (when a=1). Furthermore, when −0.7<r<0.7, system (5) is hyperchaotic for almost all parameter a in [0,1] and realizes the entire transition spectrum from one to the other.
Let x=(x,y,z,v)T. By decomposing the linear and nonlinear parts, the unified system (5) can be rewritten as
where

The impulsive control of the unified hyperchaotic system is then given by
where τ i ,i=1,2,… denotes the moment when impulsive control occurs, B i is the control gain matrix. Chaotic (hyperchaotic) signals are bounded, so there exists a positive number M such that |y|≤M for all t. We use I to represent identity matrix. Then we have the following stability theorem for the impulsive control system (7).
Theorem 3
Let d i be the largest eigenvalue of \((I+B_{i}^{T})(I+B_{i})\), B i is Hermitian, the spectral radius of I+B i , ρ(I+B i )≤1, d=max{d i }. And let λ max(a) be the largest eigenvalue of \(\frac{1}{2}(A+A^{T})\) in a∈[0,1]. If

then the origin of the impulsive controlled unified hyperchaotic system (7) is asymptotically stable.
Proof
Construct the Lyapunov function \(V(t,\boldsymbol{x})=\frac {1}{2}\boldsymbol{x}^{T}\boldsymbol{x}\), for t≠τ i . The time derivative of V(t,x) along the solution of Eq. (7) is

So condition 1 of Theorem 1 is satisfied with g(t,ω)=(2λ max(a)+0.1(1−a)M)ω.
Since I+B i is symmetric, by employing Euclidean norm, we have ρ(I+B i )=∥I+B i ∥. Then for any ρ 0>0 and \(\boldsymbol{x}\in S_{\rho _{0}}\), we have ∥x+U(i,x)∥=∥x+B i x∥≤∥I+B i ∥∥x∥=ρ(I+B i )∥x∥≤∥x∥. Consequently, \(\boldsymbol{x}+B_{i}\boldsymbol{x}\in S_{\rho_{0}}\). For t=τ i , we have

So condition 2 of Theorem 1 is satisfied with ψ i (ω)=dω. Obviously, condition 3 of Theorem 1 is also satisfied. Hence, the asymptotic stability of the system (7) is implied by that of the following comparison system
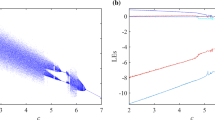
From (8), we have \(\int_{\tau_{i}}^{\tau_{i+1}}(2\lambda_{\max}(a)+0.1M(1-a))\,dt+\ln (\xi d)\leq0\), ξ>1, for all i. It can be seen from Fig. 1 that λ(a)>0, where λ(a) is the largest eigenvalue of \(\frac {1}{2}(A+A^{T})\) at a. So λ max(a)=max{λ(a)}>0 and \(\dot{\zeta}(t)=2\lambda_{\max}(a)+0.1(1-a)M>0\). From Theorem 2, we can know that the trivial solution of Eq. (7) is asymptotically stable.

The value of λ(a)
□
Remark 1
{τ i } is said to be equidistant if there exists a constant δ>0 such that τ i+1−τ i =δ,i=1,2,…. Then (8) can be rewritten as
Furthermore, we can obtain an estimate of the upper bound of \(\delta ,\delta_{\max}=-\frac{\ln(\xi d)}{2\lambda_{\max}(a)+0.1(1-a)M}\). Here, d i and d should satisfy 0<d,d i <1.
4 Impulsive synchronization of unified hyperchaotic system
The impulsive synchronization of unified hyperchaotic system will be studied in this section. In order to synchronize system (6) (the driving system) via impulses, we design the following response (or driven) system:
where \(\tilde{\boldsymbol{x}}=(\tilde{x},\tilde{y},\tilde{z},\tilde{v})^{T}\) is the state variables of the response system, P i is a 4×4 control gain matrix, \(\boldsymbol{e}=(e_{1},e_{2},e_{2})^{T}=(x-\tilde {x},y-\tilde{y},z-\tilde{z},v-\tilde{v})^{T}\) is the synchronization error.
Let \(\boldsymbol{\varphi}(\boldsymbol{x},\tilde{\boldsymbol{x}})=\boldsymbol{\phi}(\boldsymbol{x})-\boldsymbol{\phi}(\boldsymbol {\tilde{x}})=(0,-xz+\tilde{x}\tilde{z}, xy-\tilde{x}\tilde {y},0.1(1-a)(yz-\tilde{y}\tilde{z}))^{T}\). Then the error system of the impulsive synchronization is given by
For the stability of the origin of error system (14), we have the following theorem.
Theorem 4
Let d i be the largest eigenvalue of \((I+P_{i}^{T})(I+P_{i})\), P i is Hermitian, the spectral radius of I+P i , ρ(I+P i )≤1, d=max{d i }. And let λ max(a) be the largest eigenvalue of \(\frac{1}{2}(A+A^{T})\) in a∈[0,1], If

Then the origin of the error system (14) is asymptotically stable.
Proof
It is easy to know that the state variables of system (13) are bounded. We assume that \(N=\max\{ |y|,|z|,|\tilde{z}|,|\tilde{v}|\}\). Let \(V(t,\boldsymbol{e})=\frac{1}{2}\boldsymbol {e}^{T}\boldsymbol{e}\). The time derivative of V(t,e) along the solution of Eq. (14) is

Hence, condition 1 of the theorem is satisfied with g(t,ω)=(2λ max(a)+2N+0.3(1−a)N)ω. The remaining part of the proof is the same as the corresponding proof of Theorem 3. □
Remark 2
If {τ i } is equidistant, the estimate of the upper bound of impulsive interval is
0<d, d i <1.
5 Numerical simulations results
In order to show how the impulsive control and synchronization method works, we present some simulation results in this section. For simplicity, we assume {τ i } is equidistant, and τ i+1−τ i =δ.
5.1 Impulsive control
In this simulation, we take the control gain matrix B i =B, and \(B=\operatorname{diag}(k,-0.8,-0.8,-0.8)\) (\(\operatorname{diag}\) stands for the diagonal matrix with the column vector on its diagonal). So B is Hermitian. From Theorem 3, we can obtain that −2≤k≤0. Then we have
and the estimates of bounds of stable regions are given by
where M=28.9255. By computing, we obtain λ max(a)=29.5263.
When r=0.2, Fig. 2(a) shows the stable region for different ξs versus a∈[0,1] and k∈[−2,0]. To verify the performance of the impulsive control method, we choose a=0.84 and r=0.2, the stable region is shown in Fig. 2(b). In Figs. 2(a) and (b), the region under the curved surface(curve) of ξ is the stable region.

The impulsive control of unified hyperchaotic system: (a) stable region for ξ=1,2,10 (from the top down) versus a and k; (b) stable region when a=0.84; (c) stable results; (d) unstable results (Color figure online)
Figure 2(c) shows the stable results within the stable region with k=−1.6, δ=0.015, and ξ=1. It can be seen from Fig. 2(c) that the system asymptotically approaches the origin. Figure 2(d) shows the unstable results with k=−1.6, δ=0.15, and ξ=1. The 4 lines in Fig. 2(c) and (d) show the evolution of x,y,z, and v, respectively.
Remark 3
In simulation, we find that some δ above the curved surface (curve) also make the system stable. There are two reasons for this. First, the upper bound given in theorem is sufficient but not necessary. Second, we enlarged the denominator of the upper bound in the proof process of Theorem 3. However, the stable region under the curved surface (curve) need less time to achieve control than that above the curved surface (curve), which may have some practical significance.
5.2 Impulsive synchronization
Here, we take the control gain matrix P i =P, and \(P=\operatorname{diag}(k,-0.8,-0.8,-0.8)\), −2≤k≤0. So P is Hermitian. Then we have
and the estimates of bounds of stable regions are given by
where N=50.0015. By computing, we obtain λ max(a)=29.5263.
The initial conditions are given by (x(0),y(0),z(0),v(0))=(5,2,7,5) and \((\tilde{x}(0),\tilde{y}(0),\tilde{z}(0),\tilde{v}(0))=(2,4,6,8)\). We take r=0.2. Figure 3(a) shows the stable region for different ξs in a∈[0,1] and k∈[−2,0]. To verify the performance of the impulsive control method, we choose a=0.84 and r=0.2, the stable region is shown in Fig. 3(b).

The impulsive synchronization of unified hyperchaotic system: (a) stable region for ξ=1,2,6 (from the top down) versus a and k; (b) stable region when a=0.84; (c) stable synchronization results; (d) when δ is too large, synchronization cannot be achieved (Color figure online)
Figure 3(c) shows the synchronization results for k=−0.6, δ=0.01, and ξ=1. it can be seen from Fig. 3(c) that the synchronization is achieved rapidly. Figure 3(d) shows that the impulsive synchronization is unstable when k=−1.2, δ=0.1, and ξ=1. The 4 lines in Figs. 3(c) and (d) show the evolution of e 1,e 2,e 3, and e 4, respectively.
6 Conclusions
In this paper, we studied the control and synchronization of a new unified hyperchaotic system. The control gains and impulsive intervals are both variable. The conditions for global asymptotic stability were derived, and the upper bound of impulsive interval is given. The results presented in this paper may be useful for designing a communication system with a high security level.
References
Yang, T.: Impulsive control. IEEE Trans. Autom. Control 44, 1081–1083 (1999)
Yang, T.: Impulsive Control Theory. Springer, Berlin (2001)
Zhang, H.G., Wang, Z.L., Huang, W.: Chaos Control Theory. Northeastern University, Shenyang (2003)
Yang, T., Chua, L.O.: Impulsive stabilization for control and synchronization of chaotic systems: theory and application to secure communication. IEEE Trans. Circuits Syst. I 44, 976–988 (1997)
Zhang, H.G., Ma, T.D., Huang, G.B., Wang, Z.L.: Robust global exponential synchronization of uncertain chaotic delayed neural networks via dual-stage impulsive control. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40, 831–844 (2010)
Lakshmikantham, V., Bainov, D.D., Simeonov, P.S.: Theory of Impulsive Differential Equations. World Scientific, Singapore (1989)
Zhang, H.G., Dong, M., Wang, Y.C., Sun, N.: Stochastic stability analysis of neutral-type impulsive neural networks with mixed time-varying delays and Markovian jumping. Neurocomputing 73, 2689–2695 (2010)
Stojanovski, T., Kocarev, L., Parlitz, U.: Driving and synchronizing by chaotic impulses. Phys. Rev. E 54, 2128–2131 (1996)
Yang, T., Yang, L.B., Yang, C.M.: Impulsive control of Lorenz system. Physica D 110, 18–24 (1997)
Yang, T., Yang, L.B., Yang, C.M.: Impulsive synchronization of Lorenz systems. Phys. Lett. A 226, 349–354 (1997)
Sun, J.T., Zhang, Y.P., Wu, Q.D.: Less conservative conditions for asymptotic stability of impulsive control systems. IEEE Trans. Autom. Control 48, 829–831 (2003)
Sun, J.T., Zhang, Y.P., Wu, Q.D.: Impulsive control for the stabilization and synchronization of Lorenz systems. Phys. Lett. A 298, 153–160 (2002)
Sun, J.T., Zhang, Y.P.: Impulsive control of Rössler systems. Phys. Lett. A 306, 306–312 (2003)
Li, Z.G., Wen, C.Y., Soh, Y.C.: Analysis and design of impulsive control systems. IEEE Trans. Autom. Control 46, 894–897 (2001)
Xie, W.X., Wen, C.Y., Li, Z.G.: Impulsive control for the stabilization and synchronization of Lorenz systems. Phys. Lett. A 275, 67–72 (2000)
Chen, S.H., Yang, Q., Wang, C.P.: Impulsive control and synchronization of unified chaotic system. Chaos Solitons Fractals 20, 751–758 (2004)
Li, C.D., Liao, X.F., Zhang, X.Y.: Impulsive synchronization of chaotic systems. Chaos 15, 023104 (2005)
Itoh, M., Yang, T., Chua, L.O.: Conditions for impulsive synchronization of chaotic and hyperchaotic systems. Int. J. Bifurc. Chaos 11, 551–560 (2001)
Hu, M.F., Yang, Y.Q., Xu, Z.Y.: Impulsive control of projective synchronization in chaotic systems. Phys. Lett. A 372, 3228–3233 (2008)
Zhang, L.P., Jiang, H.B., Bi, Q.S.: Reliable impulsive lag synchronization for a class of nonlinear discrete chaotic systems. Nonlinear Dyn. 59, 529–534 (2010)
Li, Y., Liao, X.F., Li, C.D., Huang, T.W., Yang, D.G.: Impulsive synchronization and parameter mismatch of the three-variable autocatalator model. Phys. Lett. A 366, 52–60 (2007)
Wen, C.Y., Ji, Y., Li, Z.G.: Practical impulsive synchronization of chaotic systems with parametric uncertainty and mismatch. Phys. Lett. A 361, 108–114 (2007)
Itoh, M., Yang, T., Chua, L.O.: Experimental study of impulsive synchronization of chaotic and hyperchaotic circuits. Int. J. Bifurc. Chaos 9, 1393–1424 (1999)
Zhang, H.G., Fu, J., Ma, T.D., Tong, S.C.: An improved impulsive control approach for nonlinear systems with time-varying delays. Chin. Phys. B 18(3), 969–974 (2009)
Zhang, H.G., Huang, W., Wang, Z.L.: Impulsive control for synchronization of a class chaotic systems. Dyn. Contin. Discrete Impuls. Syst., Ser. B, Appl. Algorithms 12, 153–161 (2005)
Zhang, H.G., Ma, T.D., Yu, W., Fu, J.: A practical approach to robust impulsive lag synchronization between different chaotic systems. Chin. Phys. B 17, 3616–3622 (2008)
Wang, F.Q., Liu, C.X.: Hyperchaos evolved from the Liu chaotic system. Chin. Phys. 15, 963–968 (2006)
Liu, L., Liu, C.X., Zhang, Y.B.: Analysis of a novel four-dimensional hyperchaotic system. Chin. J. Phys. 46(4), 386–393 (2008)
Mahmoud, G.M., Mahmoud, E.E.: On the hyperchaotic complex Lü system. Nonlinear Dyn. 58(4), 725–738 (2009)
Liu, L., Liu, C.X., Zhang, Y.B.: Theoretical analysis and circuit implementation of a novel complicated hyperchaotic system. Nonlinear Dyn. 66(4), 707–715 (2011)
Wang, F.Q., Liu, C.X.: A new criterion for chaos and hyperchaos synchronization using linear feedback control. Phys. Lett. A 360, 274–278 (2006)
Mahmoud, G.M., Mahmoud, E.E.: Lag synchronization of hyperchaotic complex nonlinear systems. Nonlinear Dyn. 67(2), 1613–1622 (2012)
Ma, C., Wang, X.Y.: Bridge between the hyperchaotic Lorenz system and the hyperchaotic Chen system. Int. J. Mod. Phys. B 25, 711–721 (2011)
Acknowledgements
We would like to thank Professor Sylvester Thompson of Radford University for helpful discussions. This research is partially supported by the National Natural Science Foundation of China (Nos. 61173183, 60973152, and 60573172), the Superior University Doctor Subject Special Scientific Research Foundation of China (No. 20070141014), and the Natural Science Foundation of Liaoning province (No. 20082165).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ma, C., Wang, X. Impulsive control and synchronization of a new unified hyperchaotic system with varying control gains and impulsive intervals. Nonlinear Dyn 70, 551–558 (2012). https://doi.org/10.1007/s11071-012-0476-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-012-0476-1