
Abstract
In this paper an efficient implementation of decision feed back equalizer (DFE) is carried out using novel memory less distributed arithmetic (NMLDA) filter. In wireless transmission systems, DFEs are used to mitigate the inter-symbol interference (ISI). The ISI is occurred due to multi-path propagation of the transmitted signal. High data rate systems demand higher order filters in DFE architectures which increase complexity in hardware design. In our proposed NMLDA design, we have used multiplexers and enhanced compressor adders in place of memory unit and conventional adders. The proposed design occupies lower area and gives higher throughput, when compared to MAC based filter and all other memory based DA filter architectures. By using proposed NMLDA based DFE, the ISI errors in transmission signal, will be minimized and the performance of the transmission system will be enhanced. We have synthesized the NMLDA of 32-tap, 16-tap, 8-tap and 4-tap filters and implemented them on FPGA device. The proposed design has nearly 70% less number of logical elements than OBC DA and 50% less than MDA and offers better throughput than the existing designs when implemented on Altera Cyclone III EP3C55F484C6.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
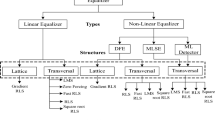
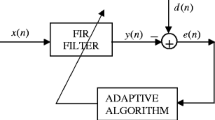
In telecommunication, a signal transmitted undergoes distortions due to multi-path propagation and band limited channels which causes the inter symbol interference (ISI) [15]. ISI causes severe effect in wireless channel and makes the signal communication less reliable. Equalizer is a device that attempts to nullify the distortion occurred by a transmitted signal through a channel. Equalizers [16] are placed at the receiver side to combat the ISI and to recover the transmitted signal. The classification of equalizers is detailed in Fig. 1. They are broadly classified as Linear equalizers and non-linear equalizers. Linear equalizers can eliminate the ISI, but enhances other noises which leads to poor signal performance. When the channel distortion is too severe and cannot be mitigated by linear equalizers, non-linear equalizers are used. The performance of non-linear equalizers is more effective to nullify the channel impairment. Decision feedback equalizer [2, 5, 16] is the non-linear equalizer which is effectively used as channel equalizer. DFE gives better signal to noise ratio when compared with linear equalizer by removing ISI and it exhibits less noise. The basic architecture of DFE is shown in Fig. 2. It consists of a decision device (quantizer), a feedforward (FF) filter, and a feedback(FB) filter.

Classification of equalizers

Block diagram of decision feed-back equalizer
The FF filter receives and equalizes the data with the transfer function of anti causal part of the channel and cancels pre-cursor ISI. The noise enhanced in DFE is significantly reduced. The FB filter suppresses the post-cursor ISI. The coefficients for the FF and FB filter should be carefully chosen to operate the DFE with zero errors. Untill the quantizer propagates zero value, the DFE channel will operate efficiently with less noise.
When data rate of the transmission system increases, the output of the DFE causes more symbols to overlap. To decrease this, we have to increase the order of FF and FB filter in DFE. Generally DFEs are designed using multiply accumulate units (MAC). When the filter order increases, the number of multipliers required by MAC unit also increases, which makes the hardware architecture more complex and the implementation of the DFE will become a challenging task. To reduce the area of DFE, MAC units are replaced with multiplier less architectures.
Many multiplier-less architectures have been reported in the literature [1, 4, 7, 9, 13, 20, 21], some of them have been proved efficient in certain conditions. Distributed Arithmetic (DA) architecture is one of the baseline efficient multiplier less architectures which pre-computes and stores the partial inner product of two vectors in a ROM/LUT. Generally the speed of MAC based multipliers depends on the length of the vector, but the speed of DA based architecture depends on the bit-length of the input vector. Hence DA based architectures (DAA) are faster than MAC based ones. DSP blocks such as FIR, IIR, DCT, FFT and adaptive filters can be implemented using DAA. The size of the memory in DA based FIR filter raises exponentially when the filter order is increased. To address this issue, many DAA [3, 12] have been proposed with less memory usage. In ref. [22], a modified DA (MDA) architecture was explained. In this, the LUT size is halved by replacing adder with adder/substractor. Further the LUT size of DA is reduced by introducing offset binary code (OBC) concept. DAA was constructed without the usage of memory. In [6], the memory less architecture was developed by replacing multiplexers and adders instead of LUT/ROM. Several applications like hearing-aids, software defined radio, channel equalizers utilize the DAA. The works in [8, 19] proposed DAA for efficient base band processing in software receiver application. The authors in [17, 18] have proposed block floating point (BFP) approach for adaptive DFE. The performance cost of BFP is more when observed with the fixed point approach. Basic DA based DFE and OBC DA based DFE architectures are described in [10, 11, 14]. These architectures occupy higher area due to usage of ROM/LUT.
In this paper, we propose a novel memory less Distributed Arithmetic (NMLDA) filter and developed DFE by using the proposed NMLDA, which occupies less area and offers high speed when compared to the existing DFE architectures.
The remnant of the paper is organized as follows. Section 2 comprises of the mathematical calculations of the DA. The proposed NMLDA architecture is described in Section 3. Section 4 emphasizes on the implementation of DFE with NMLDA architecture. We provide the synthesis results of existing and proposed design in Section 5. Finally conclusion encompasses in Section 6.
2 Background of distributed arithmetic
The bit serial multiplication operation of DA can be performed with in single direct step. Let us consider xk and dk to be the input and fixed filter coefficient vectors with K number of filter input words. Multiplication of vectors can be written as
Where xk is written as signed 2′s complement binary number and |xk| < 1, then xk can be expressed as:
Where xk = bk0, bk1, ....... bk(N− 1) and bkn has (0, 1) values. On substituting xk in y and rearranging the summation order, we get finally
Equation (3) provides us DA form. The modify form of above equation is:
Where
Cl is the pre-computed partial inner product value which is stored in the memory. It has 2k possible combination values and contains 2 ∗ 2k size of LUT. The LUT size will be reduced from (2 ∗ 2k) to 2k by using MDA design. Further the LUT size is reduced to 2k− 1 by having OBC concept in DA architecture. When filter order increases, the LUT size of DA increases and hence memory less DA architecture (MLDA) is developed to reduce the area occupancy. The memory units are replaced with multiplexers in MLDA architecture. In the paper, we further extended MLDA design to decrease the area when filter order increases.
3 Proposed novel memory-less DA filter architecture
Our proposed Novel memory-less DA (NMLDA) filter architecture is explained in this section. It consists of 2:1 multiplexers instead of memory elements and the adders of memory less DAA [6] are replaced with enhanced 4:2 compressor as shown in Fig. 3. It consists of serial in parallel out shift register (SIPOSR), four 2:1 multiplexers, enhanced 4:2 compressor adders and shift accumulators. The input data xk is fed to the SIPOSR and the outputs from shift registers will act as selection lines for four 2:1 multiplexers. One of the inputs of the 2:1 multiplexer is the filter coefficient and the other input is logic ’0’. If the selection input line is high, then filter coefficient will present at output else the output of multiplexer is zero. The output from MUXs are A1, A2, A3, A4 which are given to the enhanced 4:2 compressor adder to get final output.

Block diagram of 4-tap NMLDA filter
The enhanced 4:2 compressor adder is designed with dual mode logic (DML) and is shown in Fig. 4. DML logic consists of XOR/XNOR module and MUX module. The XOR/XNOR module is developed with CMOS logic and MUX module is developed using transmission logic gate (TG). By using DML realization, we can achieve better results in area and speed. The outputs from MUXs A1, A2, A3 and A4 are given to enhanced 4:2 compressor adder. A5 (Cin) is the fifth input to the compressor which is the Cout of the previous stage compressor. The four inputs A1, A2, A3, A4 and sum output will have same weights. The A1 and A2 inputs are fed to XOR/XNOR1 module and A3 and A4 are fed to XOR/XNOR2 module. The outputs from XOR/XNOR modules are given to the MUX1 module with A4 as a selection line. The outputs from MUX1 module are given as inputs to the MUX2 module with A5 as selection line to generate sum. To achieve carry, A4 and A5 are given to MUX4 with selection line as one of the output of MUX2. By using DML logic, the 4:2 compressor adder provides the outputs as follows:

Block diagram of enhanced compressor adder with DML logic
The outputs sum and carry are given to shift and accumulator unit to get final result.
4 Decision feedback equalizer with proposed NMLDA
Let us consider, decision feed back equalizer shown in Fig. 2, with input signal x(k), where k∈ Z with Nf number of FF filter coefficients and feedback output decision r(k) with Nb number of FB filter coefficients. The output generated decision Sqk for DFE is given as follows:
where Q[.] represents the quantization operation.
where
The coefficient of FF filter is dT and the coefficient of FB filter is bT. Nb and Nf are number of FB and FF filter coefficients respectively. The 2′s complementary form of x(k) and r(k) with W word length can be expressed as
On substituting Eqs. (16) and (17) in Eqs. (12) and (13) respectively and again substituting in Eq. (10) finally we get:
DFE architecture with proposed NMLDA is shown in Fig. 5. DFE consists of FF filter block, control circuit, FB filter block and decision device. Both FF and FB filter blocks are designed by using proposed NMLDA architecture. It consists of serial in parallel out shift register bank, a block of multiplexers, enhanced compressor adder bank and shift-accumulator block. In FF filter block, the input from the SIPO register bank are given as a selection line to the multiplexer and outputs from multiplexers are passed to the enhanced 4:2 compressor adder, from there it is given to the shift-accumulator to compute the output \(\hat {x(k)}\). Similar operation will be performed in FB filter block and the output \(\hat {r(k)}\) is achieved. The difference of the outputs of FF and FB filter blocks is S(k) which is given to the decision device. The output S(k) is checked by the decision device whether the signal lies with in

Decision feedback equalizer with NMLDA
the range of signal or not and quantizes the signal according to the modulated scheme. The process will be continued untill DFE gets zero error.
5 Results and discussion
We have validated the proposed design explained so for by performing simulation. We simulated 4,8,16 and 32 taps of NMLDA filter architecture and implemented them on FPGA. The number of logical elements, static power consumption and maximum sampling frequency are obtained by using Altera cyclone III . The results of proposed architecture are compared with MAC based filter, the OBC DA based filter, MDA filter and memory-less DA based filter and are tabulated.
From the results shown in Table 1, we analyzed that the number of logical elements in proposed architecture is very less when compared to MAC architecture and other memory based DA architectures. In proposed 4-tap FF filter architecture,the OBC technique and MAC design have same number of logical elements but when the filter order increases, there is large variation in their logical elements. Also the number of logical elements for proposed design is less when compared to the memory less architecture [6] and is shown in Fig. 6. It is observed from Table 2 that the maximum frequency of the proposed NMLDA is very high when compared with all other architectures and observed in Fig. 7. From Table 3, we observe that static power consumption of NMLDA is almost same as the with the memory based DA architectures.

Logical elements for proposed and existing DA architectures

Frequency response for proposed and existing DA architectures
Critical path delay is the longest delay path between any two registers in a system. The critical path delay of MAC based FB filter is CMAC = Tmul + NTadd, where Tmul= Computation time of multiplier, Tadd = Computation time of adder. Where ‘N’ is the positive number. Critical path delay for MAC and MDA based architectures are almost same for lower order filters. The critical path delay of MDA scheme is CMDA= Tmemory + NTadd + Tmux. The critical path delay of OBC DA based design is COBC = TOBC + Tmux + (N + 1)Tadd. The critical path delay for OBC based DA is higher when compared with all other architectures, because EXOR gates are additionally added. The critical path delay for the memory-less DA (MLDA) filter design is given as CMLDA = Tmux + Tadd. The critical path delay for the proposed NMLDA design is given as CNMLDA = Tmux + Tcompressoradder. As the critical path delay for the proposed design is less it exhibits high throughput.
The proposed DFE architecture with NMLDA has been tested by channel equalizer system with binary phase shift keying (BPSK) and frequency shift keying (FSK) modulated techniques. Figures 8 and 9 depict the output responses of proposed DFE based channel equalizer with BPSK and FSK signals respectively. Let us consider that a set of channel impulse response signals are modulated with carrier signal using BPSK and FSK techniques and are transmitted. At receiving side of the channel equalizer, the received signal is generated with noise and ISI type of errors. For removing noise and ISI errors in the generated signal, the signals are passed to the DFE. In DFE, the FF filter block removes the pre-cursor anti-causal part of ISI and the rest of the noise and errors are removed in the FB filter block. The DFE channel will operate untill the decision device of the DFE propagates zero value. Finally, the original signal output is obtained with out errors in DFE. The original noise signal and filtered ISI free signal for BPSK and FSK are shown in Figs. 10 and 11 respectively.

Waveforms of proposed DFE based channel equalizer system using BPSK

Waveforms of proposed DFE based channel equalizer system using FSK

Original noise signal and filtered ISI free signal of BPSK

Original noise signal and filtered ISI free signal of FSK
6 Conclusion
In this paper, we proposed NMLDA based DFE. By using NMLDA architecture the number of logical elements used is reduced when compared with MAC architecture and memory based DA architectures. By using novel enhanced 4:2 compressor adder in the proposed architecture, the number of adders used is reduced. So the critical path of the design is reduced, which causes increase in speed. By using NMLDA based DFE, the ISI errors in the transmitted signal can be minimized and the original signal that is transmitted can be obtained without errors. The proposed architecture becomes extremely helpful for high speed data rate modems.
References
Burleson WP, Scharf LL (1991) A vlsi design methodology for distributed arithmetic. Journal of VLSI Signal Processing Systems for Signal, Image and Video Technology 2(4):235–252
Callender C, Theodoridis S, Cowan C (1994) Adaptive non-linear equalisation of digital communications channels. Signal Process 40(2-3):325–333
Chen HC, Guo JI, Jen CW, Chang TS (2005) Distributed arithmetic realisation of cyclic convolution and its dft application. IEE Proceedings-Circuits Devices and Systems 152(6):615–629
Croisier A, Esteban D, Levilion M, Riso V (1973) Digital filter for pcm encoded signals. US Patent 3,777,130
Douillard C, Jézéquel M, Berrou C, Electronique D, Picart A, Didier P, Glavieux A (1995) Iterative correction of intersymbol interference: turbo-equalization. Trans Emerg Telecommun Technol 6(5):507–511
Ghamkhari SF, MBGG (2012) A low-power, low-area architecture design for distributed arithmetic (da) unit. In: 20th Iranian conference on electrical engineering, vol 1. IEEE, pp i–i
Grande NJ, Sridevi S (2017) Asic implementation of shared lut based distributed arithmetic in fir filter. In: 2017 international conference on microelectronic devices, circuits and systems (ICMDCS). IEEE, pp 1–4
Hurskainen H, Raasakka J, Ahonen T, Nurmi J (2009) Multicore software-defined radio architecture for gnss receiver signal processing. EURASIP Journal on Embedded Systems 2009(1):543–720
Jyothi GN, Sriadibhatla S (2019) Asic implementation of low power, area efficient adaptive fir filter using pipelined da. In: Microelectronics, electromagnetics and telecommunications. Springer, pp 385–394
Khan MT, Ahamed SR (2016) Low cost implementation of concurrent decision feedback equalizer using distributed arithmetic. In: 2016 1st India international conference on information processing (IICIP). IEEE, pp 1–5
Khan MT, Ahamed SR, Chatterjee A (2016) Efficient implementation of concurrent lookahead decision feedback equalizer using offset binary coding. In: 2016 20th international symposium on VLSI design and test (VDAT). IEEE, pp 1–6
Meher PK (2006) Hardware-efficient systolization of da-based calculation of finite digital convolution. IEEE Trans Circuits Syst Express Briefs 53(8):707–711
NagaJyothi G, SriDevi S (2017) Distributed arithmetic architectures for fir filters-a comparative review. In: 2017 international conference on wireless communications, signal processing and networking (wiSPNET). IEEE, pp 2684–2690
Prakash MS, Shaik R, Koorapati S (2016) An efficient distributed arithmetic-based realization of the decision feedback equalizer. Circuits Systems Signal Process 35(2):603–618
Proakis JG (2001) Digital signal processing: principles algorithms and applications. Pearson Education India
Qureshi SU (1985) Adaptive equalization. Proc IEEE 73(9):1349–1387
Shaik R, Chakraborty M (2006) An efficient realization of the decision feedback equalizer using block floating point arithmetic. In: IEEE Asia Pacific conference on circuits and systems, 2006. APCCAS 2006. IEEE, pp 1047–1050
Shaik R, Chakraborty M (2013) A block floating point treatment to finite precision realization of the adaptive decision feedback equalizer. Signal Process 93(5):1162–1171
Waelchli G, Baracchi-Frei M, Botteron C, Farine PA (2010) Distributed arithmetic for efficient base-band processing in real-time gnss software receivers. J Electr Comput Eng 2010:2
White S (1986) High-speed distributed-arithmetic realization of a second-order normal-form digital filter. IEEE Transactions on Circuits and Systems 33(10):1036–1038
White SA (1989) Applications of distributed arithmetic to digital signal processing: a tutorial review. IEEE ASSP Mag 6(3):4–19
Yoo H, Anderson DV (2005) Hardware-efficient distributed arithmetic architecture for high-order digital filters. In: IEEE international conference on acoustics, speech, and signal processing, proceedings, vol 5. (ICASSP’05), pp v–125
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
NagaJyothi, G., Sridevi, S. High speed and low area decision feed-back equalizer with novel memory less distributed arithmetic filter. Multimed Tools Appl 78, 32679–32693 (2019). https://doi.org/10.1007/s11042-018-7038-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-018-7038-6