
Abstract
Recently, sparse subspace clustering, as a subspace learning technique, has been successfully applied to several computer vision applications, e.g. face clustering and motion segmentation. The main idea of sparse subspace clustering is to learn an effective sparse representation that are used to construct an affinity matrix for spectral clustering. While most of existing sparse subspace clustering algorithms and its extensions seek the forms of convex relaxation, the use of non-convex and non-smooth l q (0 < q < 1) norm has demonstrated better recovery performance. In this paper we propose an l q norm based Sparse Subspace Clustering method (lqSSC), which is motivated by the recent work that l q norm can enhance the sparsity and make better approximation to l 0 than l 1. However, the optimization of l q norm with multiple constraints is much difficult. To solve this non-convex problem, we make use of the Alternating Direction Method of Multipliers (ADMM) for solving the l q norm optimization, updating the variables in an alternating minimization way. ADMM splits the unconstrained optimization into multiple terms, such that the l q norm term can be solved via Smooth Iterative Reweighted Least Square (SIRLS), which converges with guarantee. Different from traditional IRLS algorithms, the proposed algorithm is based on gradient descent with adaptive weight, making it well suit for general sparse subspace clustering problem. Experiments on computer vision tasks (synthetic data, face clustering and motion segmentation) demonstrate that the proposed approach achieves considerable improvement of clustering accuracy than the convex based subspace clustering methods.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The high dimensional data, such as images, video, medical data, are ubiquitous in many real world applications. However, the high dimensional data not only increase the computational cost and memory requirement, but also cause the curse of dimensionally. In practice, the high dimensional data often lie in low dimensional subspace, namely, their intrinsic dimension is often much lower than the dimension of ambient space. For instance, in motion segmentation problem, feature point trajectories extracted from a video sequence with multiple moving objects lie in an affine subspace with dimension at most 4 [29]. Face images of different subjects under varying illumination lie in a linear subspace with dimension at most 9 [1]. Background modelling from surveillance video lie in a low rank subspace [18]. Complex patient data, created by bio-medicine, often lie in a low dimensional subspace of patient groups [19]. All of these applications motivate the technique for finding low-dimensional representations of the high-dimensional data. Subspace clustering, which refers to the problem of segment data into the corresponding subspaces, is proposed to address those problems.
Inspired by the success of compressed sensing and sparse coding, many subspace learning methods based on sparsity [35, 37] are proposed. Among them, Sparse Subspace Clustering (SSC) [10, 27] is the representative state-of-the-art subspace learning method, and has received tremendous attentions due to its simplicity and elegant formulation. The key for SSC is to design a good sparse representation model that reveals the real subspace structure of high-dimensional data. SSC tends to separate the high dimensional data into their underlying subspace, such that each data can be linear represented by a few atoms of their corresponding subspace. It’s a basis problem abstracted from machine learning, signal processing and computer vision. Many recently interesting applications motivated the development of SSC, e.g., Visual analytics for concept exploration in subspaces of patient groups [19], robust visual tracking via sparsity-induced subspace learning [28], dimensionality reduction subapce clustering through random projection [17], to name just a few. As a spectral based clustering method, it has been studied widely. In contrast with most classical subspace learning approaches, SSC can deal with multiple subspaces, of varying dimensions, data nuisances and robust to noise and outliers. SSC takes full advantage of the notion of self-expressiveness property [9], that is, each data can be expressed as a linear combination of a few points from its own subspace. Under the sparse assumptions, SSC can discover the low dimensional subspace structure.
In general, SSC leverge the sparest representation under convex l 1 regularizer to learn the affinity matrix, then subspace segmentation is performed by spectral clustering algorithm. There are many state-of-the-art methods being proposed recently, compared to SSC, the difference mainly come from the regularization. Least Squares Regression(LSR) [24] methods encourages a grouping effect which tends to group highly correlated data together. The Subspace Segmentation via Quadratic Programming(SSQP) [31] models subspace clustering with a convex quadratic optimization, Low Rank Representation (LRR) [22, 30] seeks the lowest rank representation among all data, and surrogate the rank function via nuclear norm minimization. Among the most existing algorithms for subspace clustering, they all implicitly seek the block diagonal structure of affinity matrix to ensure the performance. There are many extensions to improve the performance by adapting this idea, such as [23] enhances subspace clustering by manifold regularization. Feng et al. [11] adapts block-diagonal prior to subspace segmentation. However, Most of existing subspace clustering are all based on the relax convex minimization, e.g. l 1 [34] or quadratic programmin [26] g. However, convex relaxation with l 1 norm, though is known to be the best convex surrogate of l 0, is equal or closely approximated to l 0 only under some strict condition, such as RIP conditions [6]. In reality many applications violate this, and that the performance will degrade unless RIP satisfies. On the other hand, quadratic regularizations does not lead to sparse solution. Hence, to overcome this issue making by l 1 or quadratic programming, Thresholding Subspace Clustering (TSC) [16], SSC with Orthogonal Matching Pursuit (SSC-OMP) [8] are two heuristic approaches trying to find the sparse representation, but such greedy based methods are often sensitive to the noise and outliers.
Most of the methods mentioned above adapt regularization techniques to encourage sparsity, in that sparsity is a nature property of most signals(e.g. image data), it’s key for the success of sparse subspace clustering. Many recently research [4, 6, 7, 21] indicated that enhancing sparsity will better uncover the structure of data and better recovery the subspace structure. The recent literature [5, 14] shown that in many situations, adapting l q (0 < q < 1) norm approximate to l 0 will outperform l 1 minimization, in the sense that it often leads to more sparsity results. However, due to its non-convexity and non-smoothness, it’s often difficult to solve. l q norm instead of l 1 norm minimization make many problems more challenge. Many effective methods [12, 20] have been proposed for l q (1<q < 1) problem recently, yet most of the methods are based on iterative reweighted least square that transforms the origin problem to weighted l 1 [33] or l 2 [12] minimization. It has been proved that the algorithm has a linear rate of convergence for l 1 norm and super-linear for l q (0 < q < 1) norm, under the RIP [32] condition. Although the l q minimization problem is more difficult to solve than l 1 minimization problem, there are some novel methods being proposed recently for l q norm problem, see, e.g., [4, 6, 21].
In many situations l 1 minimization does not always yield sufficiently sparse solution, l q minimization is adopted as an alternative to l 0 minimization, the solution is often sparser than l 1 [20]. More specifically, recent work [14] shows that l q norm minimization improves the performance on face recognition problem. [5] proposed locality constrained- l q sparse subspace clustering, where l q norm is employed to enhance sparsity and, for each data point, choosing k nearest neighbours instead of entire data points to lower the computational cost. Those works received state-of-the-art results by employing l q norm minimization instead of l 1 minimization. Motivated by the recent advances of l q (0 < q < 1) minimization, we investigate l q norm regularization for SSC problem, demonstrating that it can further improve the clustering accuracy. However, existing l q norm minimization for SSC only address the noise(e.g. Gaussian noise) case, in many real world applications the data are often corrupted by outliers and noise simultaneously [15]. Such that in [5] finding k neighbours for each data may fail. Moreover, traditional IRLS algorithms can only handle with the linear constraints, but does not take the measurement noise and outlier into consideration. It’s difficult to address the l q norm regularization via IRLS for SSC under noise and outliers. Moreover, some particular SSC applications often require extra constraints, such as affine constraint for motion segmentation problem, which is computational intractability. Hence, traditional iterative reweighted algorithm does not suitable for solving SSC problem. In this paper, we propose lqSSC that unify ADMM and IRLS to solve l q norm based minimization efficiently, making it suitable for general sparse subspace clustering problem. Different from traditional IRLS algorithm that decomposes l q norm with adapted reweighted l 1 or l 2 norm, our smooth IRLS algorithm is based on gradient descent with adaptive weight [25]. The advantage of gradient descent for l q norm minimization is two fold. Firstly, easy to implementation and general for different kinds of problems. Secondly, though we discuss l q norm here, the technique is suitable and will benefit other non-convex regularization problems. For instance, Logarithm penalty, SCAD, LSP, and capped norm, all of which share many similar properties with l q norm, Zhang [36] unified this work.
1.1 Contribution
-
1.
We make use of l q (0 < q < 1) norm for the sparse representation problem. Although it’s non-convexity and non-smoothness, we introduce a smooth regularization and develop an Smooth Iterative Reweighted Least Square(SIRLS) algorithm, which is fast, easy to parallel and guarantee to converge.
-
2.
We propose an l q norm based model for sparse subspace clustering under ADMM framework, such that l q norm terms can be solved via smooth IRLS. Experimental results show that the proposed approach achieves considerable improvements in comparison to convex models. Though our model focuses on l q norm minimization, it can easily generalizes to other kinds of non-convex non-smooth regularizations(e.g. Log penalty, SCAD, LSP, Capped norm).
Notation and abbreviation
-
1.
SSC: Sparse Subspace Clustering
-
2.
IRLS: Iterative Reweighted Least Square
-
3.
ADMM: Alternating Direction Method of Multipliers
for a vector x∈R d, and a matrix C∈R d×n, we discuss the case 0<p,q < 1 by default, and define (p is defined similarly)
2 Sparse subspace clustering model
We first formulate the basis sparse subspace clustering problem as follow: Given a data matrix Y=[y 1,y 2,..,y n ]∈R d×n, each data point is represented as a column vector and \( \{ y_{i} \}_{i=1}^{n} \) is drawn from a union of k linear subspaces \( \{ S_{i} \}_{i=1}^{k} \) and the corresponding dimension of each subspaces is \( \{ d_{i} \}_{i=1}^{k} \). The main task is to segment the data points to their underlying subspace and recovery the low dimensional subspace. It’s known to be NP-hard unless additional assumptions. A key technique for the SSC problem is sparse representation, which can be formulated as
where Y −i =[y 1,..,y i−1,y i+1,..,y n ] is a matrix excluding the i-th column of matrix Y. ||c i ||0 is the l 0 norm of vector c, that is, the number of non-zero elements. The problem (1) is known to be non-convex and NP-hard, but recent research in the emerging theory of sparse coding and compressed sensing [32] reveal that, if the solution c i sought is sparse enough, the solution of the (1) is equal to (2)
It has been shown that under some suitable conditions, c i can be stably or exactly recovered. One of the commonly used framework for sparse representation is restricted isometry property (RIP) [32]. A vector x is k-sparse if for any m×n matrix A and any integer k, 1≤k≤n, the k-restricted isometry constant δ k is defined as the smallest constant such that
for all k-sparse vector x, the sufficient conditions include \(\delta _{2k} < \sqrt {2} - 1, \delta _{2k} < \sqrt {2}/2\) and so on. However, it is shown in [32] that exactly recover x is not always possible if \(\delta _{2k} \ge \sqrt {2} / 2\). Therefore, l 1 norm may degrade the performance in such case. To illustrate this situation clearly, we now consider the following toy example, let
It’s obvious to see that when the objective function is employed with l 1 norm, the solution is \(c_{l_{1}} = [1/8,1/8,0,0]'\), but the l 0 norm solution is \(c_{l_{0}} = [0,0,1/2,0]'\), \(||c_{l_{1}}|| = 1/4 < ||c_{l_{0}}|| = 1\). However, the sparsity of l 1 is 2 and l 0 is 1, such that l 1 may result in inferior solution. This implies that l 1 is not a good approximation to l 0. In order to obtain a solution more approximate to l 0, we study l q (0 < q < 1) minimization, which can be represented as follows
In a general situation, we consider the data that are contaminated with sparse outlying entries and noise, let
be the data that is obtained by corrupting and error free Y −i c i , which perfectly lies in a subspace. e i is the vector of sparse outlier that has only a small number of non-zero elements, which means that e i is an sparse vector. z i is the noise that is bounded as ||z i ||2<s for some s>0, which means that s i is an vector with small perturbation. We can formulate the objective function as
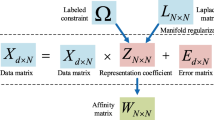
with 0<p,q≤1. In order to deal with affine subspaces, we also add affine constraints on the coefficient c i , that is 1T c=1. We reformulate and unify it with noise and outliers in a matrix form
when p=q=1, the model be the general SSC model that equivalents to [10]. Now we consider the case with 0<p,q < 1, which will form the l q norm sparse subspace clustering(lqSSC for short) problem this paper focuses on. Both of the coefficient matrix C and outlier E are modelled with non-convex norm. Clearly, this problem is in general intractable, for the reason that l p ,l q norm are all non-convexity and non-smoothness. In order to address this problem, we propose a new approach by unifying ADMM and IRLS algorithm, which details in the following section.
3 Proposed method
In this section, we make use of ADMM for solving l q norm minimization problem. We begin by introducing a general framework of ADMM, then deduce the smooth IRLS algorithm.
Alternating Direction Augmented Lagrangian(ADMM for short) [3], a method for solving the constrained optimization problems, has recently attracted much attention as it is well suited for some important classes of problems with special structure. In ADMM framework, l q norm problem can be split by introducing an auxiliary variable that decouples the variables, such that the l q norm term can be addressed by iterative reweighted algorithm. We consider the general l q norm problem
where \(f(x) = ||x||_{q}^{q}\) is non-smooth and non-convex, g(x) is a smooth and convex function. Generally, all the constrained optimization can be relaxed to unconstrained optimization via Lagrangian multiplier. Hence it can always be abstracted and converted the unconstrained optimization with only two terms, one is the l q norm regularizer term which we denote by f(x), and the other term be the remain part with g(x). Thus the complications resulting from the coupling of the origin problems of the augmented Lagrangian are eliminated. We introduce its augmented Lagrangian function
where w is the Lagrange multiplier dual variable, ρ is a positive parameter associated with the augmentation which improves the numerical stability of the algorithm. The augmented Lagrangian (9) can be equivalently formed as
Different from the traditional augmented Lagrangian methods that attempt to alternatively minimize x and z, ADMM algorithm minimizes the augmented Lagrangian by iteratively updating the primal and dual variables. Given the current iterates (x (j),z (j),w (j)), it generates a new iterate (x (j+1),z (j+1),w (j+1)) with respect to x, then respect to z, and finally performing a multiplier update. The (j+1)-th iteration can be represented as follows
Even 0<q < 1, the above iterate equations has the same iteration procedure as ADMM algorithm for the l 1 based models. However, in x-step it is no longer restricted to convex function. Since when 0<q < 1, a possible local minimizer may be trapped in after a few iterations. As the problem is non-convex, solving this non-convex problem directly may be converged to one of local minimizers. To overcome this problem, we introduce a sequential minimization strategy, which improves the global convergence performance by employing smooth IRLS.
As z (k+1) is smooth and convex, it can be updated by any standard methods, such as Newton’s method or conjugate gradient method. We focus on x k+1 and solve it with an iterative reweighted algorithm. Due to the singularity of the gradient of the associated functional above because of the sparsity of solution x, we introduce the smooth regularized version of x k+1. To make to problem easy to tackle, it can be converted with a smooth parameter 𝜖
𝜖>0 is a smooth parameter which will decrease to zero in order to make \(||x||_{q}^{q}\) differential. We now consider the optimization
It’s well known that when q=1,𝜖=0, (14) can be solved with l 1 shrinkage operator, that is, for i=1 to d,
but when 0<q < 1, it can’t be solved directly as there not exist closed form solutions. Now we develop an efficient iterative reweighted algorithm to approximate this problem, because the function J(x,𝜖) in (14) are differential, derivative J(x,𝜖) with x and let it to 0, we get
Inspired by the IRLS algorithm, firstly, let
the (16) can be reformulated as follows
x-update minimization of (18) can be carried out by solving linear equations or conjugate gradient method. Note that z (j) and w (j) are fixed in (18) of the Algorithm 1 and it updates only on the ADMM iterations. In order to achieve a more sparser solution, the terminate condition needs to be carefully designed. Our algorithm utilizes an alternating method for choosing weights and minimizers based on the (18). For x∈R d, define the non-increasing rearrangement r(x) of the absolute values of the entries of x. Thus r(x) m is the m th-largest of the set {|x j |,j=1,..,d}, and a vector x is m-sparse if and only if r(x) m+1=0. We decrease 𝜖 with \(\epsilon ^{(k+1)} = \min \{\epsilon ^{(k)}, r(x^{(k+1)})_{m+1}/d \}\), it can serve as a posteriori check on whether or not it have converged to a sparse solution. If 𝜖 (k+1)>𝜖 and 𝜖 (k+1)=r(x (k+1)) m+1=𝜖, then if we let x [m] to be a m sparse vector, we have ||x (k+1)−x [m]||≤𝜖/n. In particular if 𝜖 (k+1)=0, then x (k+1) is m-sparse solution.

3.1 Convergence analysis
The convergence analysis of ADMM has been studied thoroughly in many literature like [3] and we omit it here. We mainly focus on the convergence of smooth IRLS illustrating in Algorithm 1, which is the main contribution of this paper. As (14) is not convex, the stationary points can’t be ensure to converge to global minimization, like the EM-type algorithm. It depends on a good initial value W. Therefore, the algorithm may be in local optimization if the initiation is not properly designed. To overcome the limitation of local minimization, the algorithm can be repeated a few times in a sequence. For example, we first choose an random initiation for the algorithm with 0<q 1<1, then run it again with the initiation of the previous result but choose 0<q 2<q 1. Conducting Algorithm 1 for a few times the global optimization can often be achieved. This may not take much time in that it allows warm start by the previous results as an initialization. If the smooth IRLS of (14) find a good approximation, the ADMM procedure may converge to the global solution with high probability.
We now give the convergence analysis of the smooth IRLS algorithm. Firstly, J(x,𝜖)≥J(x) with a given 𝜖>0, where the equality holds if and only if 𝜖=0. Secondly, it’s easy to find that J(x) is majorized by J(x,𝜖). Decreasing J(x,𝜖) tends to decrease J(x). Given any γ>0, there exist 𝜖>0, such that J(x,𝜖)−J(x)<γ. Suppose \(x_{\epsilon }^{*}, x^{*}\) is the optimal solution to (14) and (11), then we have
Based on the above results, we have the following convergence theorem of the smooth IRLS algorithm.
Theorem 1
The sequence {x (k)} generated in Algorithm 1 satisfies the following properties:
-
(1)
J(x,𝜖) in non-increasing, that is, J(x (k+1) ,𝜖 k+1 )≤J(x (k) ,𝜖 k ).
-
(2)
The sequence {x (k)} is bounded.
-
(3)
the sequence converges to a critical point, that is, there exist a point x 𝜖 ∗ satisfies, (let u=z (j) −w (j) /ρ)
$$ qW^{\epsilon_{*}}x^{\epsilon_{*}} + \rho (x^{\epsilon_{*}} - u) = 0 $$(19)we give the proof in Appendix.
Finally, if (11) converge, the stationary points can be achieved via alternating minimization of (12), (11), (13).
4 l q norm based sparse subspace clustering
In this section, we will unify smooth IRLS and ADMM to solve the l q norm based sparse subspace clustering. SSC problem is equality constrained minimization problem as (7) shown. We fist reformulate the problem (7) into unconstrained optimization, and then decompose the optimization with separately iteration. Note that using the equality constraint in (7), we can eliminate Z from the optimization program and equivalently solve
To solve optimization problem (20), we first introduce an auxiliary variable matrix A to augment the constraints into the objective function, and iteratively minimize the Lagrangian with respect to the primal variables and maximize the dual variables. Convert the problem (20) to the following equivalent formulation
The solution of 21 and (20) is equivalent. The purpose of auxiliary variable is to split the optimization into multiple terms like the discussion in previous section. Next, by introducing the parameter ρ, the objective function of (21) has two extra penalty terms corresponding to the constraints, and consider the following optimization program
where <A,B>=t r a c e(A T B). The optimization of (22) can be solved iteratively by updating C,A,E,Δ,ρ while keeping other variables fixed, The update procedure can be computed as follows
-
Update C (k+1) by minimizing (22) with respect to C, while A (k),E (k),δ (k),Δ(k) are fixed. Note that,
$$ C^{(k+1)} = ||C||_{q} + \frac{\rho}{2}||C - diag(C) - A^{(k)} + \frac{{\Delta}^{(k)}}{\rho}||_{F}^{2} $$(23)the optimization of (23) is the matrix form of (11). To solve this problem, we first smooth the objective function with 𝜖, and consider the following function
$$ \begin{array}{llllllllll} \min_{J} \ F(J, \epsilon) & = ||J||_{q, \epsilon} + \frac{\rho}{2}||J - A^{(k)} + \frac{{\Delta}^{(k)}}{\rho}||_{F}^{2} \\ & = \sum\limits_{i=1}^{n} ||J_{i}||_{q, \epsilon} + \frac{\rho}{2}||J_{i} - A_{i}^{(k)} + \frac{{\Delta}_{i}^{(k)}}{\rho}||_{2}^{2} \end{array} $$(24)We can minimize F(J i ,𝜖)(i=1,2,..n) via smooth IRLS independently using (Algorithm 1), then we have C (k+1)=J (k+1)−d i a g(J (k+1)).
-
Update E (k+1) by
$$ E^{(k+1)} = \min_{E} ||E||_{q} + \frac{\lambda_{z}}{2 \lambda_{e}}|| Y - YC^{(k+1)} - E||_{F}^{2} $$(25)The solution has the same form as (14), and we use the smooth IRLS depicted in Algorithm 1 to obtain the solution.
-
Update A (k+1) by minimizing L(C,A,E,δ,ρ) with respect to A, while C (k+1), E (k),δ (k),ρ (k) are fixed. Let the derivative of L with A to zero, we get
$$ \begin{array}{cccccc} (\lambda_{z} Y^{T}Y + \rho I + \rho \mathbf{1}\mathbf{1}^{T})A^{(k+1)} = \lambda_{z} Y^{T}(Y - E^{(k+1})\\ + \rho(\mathbf{1}\mathbf{1}^{T} + C^{(k+1)}) - \mathbf{1}\delta^{(k)^{T}} - {\Delta}^{(k)} \end{array} $$(26)We solve the above equation directly since the coefficient of the left-hand side is positive definite matrix. We obtain A (k+1) via the linear equations, or solve it with conjugate gradient method.
-
Update the Lagrangian multipliers with C (k+1),E (k+1),A (k+1) fixed, perform a gradient ascent update with the step size of ρ.
$$ \begin{array}{llllllllll} \delta^{(k+1)}& = \delta^{(k)} + \rho (A^{(k+1)^{T}}\mathbf{1} - \mathbf{1}) \\ {\Delta}^{(k+1)}& = {\Delta}^{(k)} + \rho (A^{(k+1)} - C^{(k+1)}) \end{array} . $$(27)
Iteratively updated the procedure above until convergence is achieved to the setting of maximum iteration, or convergence is achieved when \(||A^{(k)} - A^{(k-1)}||_{\infty } \le \eta \), \(||A^{(k)^{T}}\mathbf {1} - \mathbf {1}||_{\infty } \le \eta \), \(||A^{(k)} - C^{(k])}||_{\infty }\le \eta \), and \(||E^{(k])} - E^{(k-1)}||_{\infty } \le \eta \), where η denotes the error tolerance for the primal and dual residuals. In this paper we choose η=10−6 for all experiments. The detail process is illustrated in Algorithm 2.

After getting the affinity matrix C, spectral clustering or Ncut methods is performed on the affinity matrix, and then the segmentation of the data in the low-dimensional space and the recovered sparse subspace are obtained. The clustering process is summarized in Algorithm 3.

5 Experiments
In this section, we evaluate our proposed method lqSSC on both synthetic and real datasets to demonstrate the efficacy. We first investigate the performance of lqSSC with random generate synthetic data of independent subspace, then carry out face clustering application on ORL database, Extend Yale B datasetsFootnote 1 and motion segmentation on Hopkins 155 dataset.Footnote 2 All the experiments are done on an Kylin Ubuntu 15.04 system with 2.6 GHz Intel Core i5 processor and 8 GB memory using Matlab. Subspace clustering error(or accuracy), as a measure of performance of different algorithms, is defined as
We empirically evaluate our method in comparison to four recently proposed methods which both have theoretical guarantees and satisfactory results: Sparse Subspace Clustering (SSC),Footnote 3 Low-Rank Representation method (LRR),Footnote 4 Subspace Segmentation via Quadratic Programming (SSQP),Footnote 5 Least Square Regression(LSR).Footnote 6 All of those comparison methods are based on spectral clustering, and can be downloaded at the author’s website.
To have a fair comparison, firstly, the affinity matrix of different algorithms are learned by manually tuning the parameters to achieve the best results, then all the methods are performed the same spectral clustering method. We use the spectral clustering code provided by SSC for the benchmark. We also assume that the number of subspace of all data are provided in advance for all algorithms. In the following experiments, our algorithm utilizes q=0.6 and q=0.3 for the experimental comparison.
5.1 Parameter setting
For the proposed method, we follow the same experimental setting in [10] for all of the following experiments. In Algorithm 1, we initialize W=diag(c i ) with any one of the solution y i =Y −i c i , 𝜖 0=1,𝜖=μ=10−4, the sparsity m in Algorithm 1 is chosen with cross validation schema. In Algorithm 2, we set \(\lambda _{e} = 2/\min _{i} \max _{j \neq i} ||y_{j}||_{1}\), \(\lambda _{z} = 2/\min _{i} \max _{j \neq i} |y_{i}^{\prime }y_{j}|\).
5.2 Synthetic data
In this section, we generate a synthetic data to study the performance of the proposed method as well as the compared methods. We consider k independent subspace and the angel between each subspace is small. We randomly sample n=200 data vectors from each subspace. The dimension of each subspace is d=5, the first subspace is generated with Matlab command D=r a n d(n,n),[U,S,V]=s v d(D), U 1=U(:,1:d). The bases of other subspaces can be computed by U (i+1)=T×U (i),2≤i≤k, where T∈R n×n is a random rotational matrix and U (i)∈R n×d is a random matrix with orthogonal columns. Then we generate the subspace with S i =U i ×r a n d(d,n), such that the data matrix can be represented by Y=[S 1,S 2,..,S k ]. We randomly add the Gaussian noise to some of elements of the data. In our experiments we add 10 % of elements with noise, which follows standard Gaussian distribution e∼N(0,1). We run each algorithm with the number of subspaces k=3,5,10 independently and record the mean and median error or accuracy. The segmentation errors are shown in Table 1. Observe that when the number of subspace is small, all algorithms show satisfactory results, but when the subspace increase to 10, the clustering error increase quickly. The clustering performance of LRR and LSR deteriorate quickly, yet our proposed algorithm(lqSSC) show stable results, reducing clustering error compared to SSC.
We then add noise to the data with different ratio that the level is from 10 to 80 %. The clustering results are shown in Fig. 1. We can see that lqSSC achieve lower clustering error compared to other methods. Moreover, our algorithm is robust to small noise ratio. When the noise ratio increase, the clustering error is comparative with SSC.

Clustering error on synthetic data added with different noise ratio. The number of subspace is setted to 3, and the results are averaged from 10 runs
5.3 Human face clustering
Face clustering aims to group the face image data under different illumination, occlusion or noise ratio according to their subjects. The reason for studying subspace clustering to this problem origin from the point of view that the vectorized images of a given face image taken under varying illumination conditions lie approximately in a 9-dimensional linear subspace [2]. Hence the subject of face images, with varying illumination and occlusion can be well approximated by a union of low-dimensional linear subspace, each subspace contain the images corresponding to a given person. We apply the subspace clustering methods to the following two widely study datasets:
-
Extended Yale Face Database B (Fig. 2), which contains 192 × 168 pixel images of 38 subjects of persons, each taken under 64 different illumination conditions. The dataset consist of 192 × 168 pixel cropped face images. In order to reduce the computational requirement, we resize the images to 48 × 42 pixels. The datasets has 38 individuals and around 64 near frontal images under different illuminations per individual. In our experiments we use the subjects L = 3, 5, 10 for clustering comparison, and the subject L is randomly chosen from the 38 subjects. We first vectorize the images and normalize it to unit vector to form the data matrix Y, each algorithm runs 10 times and record the average and median errors. We report the results in Table 2.
-
The ORL face data sets (Fig. 3) contain ten different images of each of 40 distinct subjects. For some subjects, the images were taken at different time, with varying lighting, facial expressions (open / closed eyes, smiling / not smiling) and facial details (glasses / no glasses). All the images were taken in a relative dark background with the faces in an upright, frontal position (with tolerance for a little small movement). In our experiments we use L = 5, 10, 20 subjects for clustering comparisons. This datasets contains a small number of samples in each subjects and some of those are occluded by the glass, which makes it suitable for our experiments. We test whether the algorithms are robust to the case when the dimensions are far larger than the number of samples. We run the algorithm the same as the above setting. We report the clustering results in Table 3.

Some examples of the images of 4 class in ORL face datasets

Some examples of the images of 4 class in Extended Yale Database B
For computational efficiency, firstly, we pre-process the face datasets by performing Principal Component Analysis (PCA) separately on each subject. PCA reduces the dimensionality of the data by reserving about 98 % energy. Tables 2 and 3 report the clustering results on both datasets. The table shows the average and median clustering errors of different methods. Note that when the subjects is small, all the algorithms work well. As the subjects increase to 20, LSR and SSQP fail, they show inferior results. Note that SSC performs better than LSR, LRR and SSQP, implying that ADMM for the l 1 norm minimization is well suited for the subspace clustering. Our methods with q = 0.3 case, by replacing the l 1 with l q norm minimization, improve the clustering results further. The clustering results of our method validate and coincide with recent work of l q norm minimization. This indicate that enhancing the sparsity by l q norm indeed improve the subspace clustering results.
We also test the clustering accuracy with different noise and occlusions. We run all of the algorithms 10 times independently, but just record the best clustering accuracy, which is shown in Fig. 4. Our algorithm is robust to data corruption, such as noise and occlusions. We can see that our method outperforms the benchmark methods.

Face clustering accuracy with different ratio of noise and occlusion on Extend Yale B face data, respectively. The Gaussian noise ratio levels from 10 to 80 %. The occlusion ratio is defined as the occlusion part of pixels divided by the total pixels of image
We then test the performance of face recovery, namely, recovery the clean face from the noise face. This experiment tests whether the algorithms can successfully recovery the low-dimensional subspace when data contaminated by noise or occlusion. We now perform our proposed method to recovery the subspace of the face in the Extend Yale B data. The result is shown in Fig. 5. We can see that although the image contaminated by different ratio of illumination, Gaussian noise and occlusion, our algorithm is able to recovery the low-dimensional face subspace with quite promising results.

Face recovery under different degree of corruption and noise. The four column corresponds to origin images, recovery images, outliers and sparse error. Each row corresponds to origin face and recovered results of the corresponding face
5.4 Motion segmentation
Motion segmentation refers to the problem of grouping the motion trajectories of multiple rigidly moving objects into spatial temporal part, such that each part corresponds to a single moving object [29]. Given a video sequence of multiple moving objects, let {x f p ∈R 2,p=1,..,P,f=1,..,F}, denotes the x-coordinate and y-coordinate in the P points and F frames of the sequences. Each data point y i , called feature trajectory, corresponds to a 2F-dimensional vector that consists of stacking the feature points x f i in the video as
Under the affine projection model, all feature trajectories, formed by y i (i=1,2,...,N), lie in a union of low-dimensional subspace of dimension at most 4. As a result, the motion segmentation problem can be modelled as a subspace clustering problem on the trajectory spatial coordinates.
We use the Hopkins155 motion segmentation datasets [29] to evaluate the proposed method as well as that of state-of-the-art subspace clustering methods. Figure 6 shows some examples taken from the datasets. The datasets contain sequences with two and three motions, which can be roughly divided into three categories: Checker board sequences, which consists of 104 sequences of indoor scenes taken with a hand held camera under controlled conditions. The checker board pattern on the objects is used to assure a large number of tracked points. Traffic sequences, which consists of 38 sequences of outdoor traffic scenes taken by a moving hand held camera. Articulated/no-rigid sequences, which consists of 13 sequences displaying motions constrained by joints head and face motions, etc. The datasets consists of totally 155 video sequences, 120 of which contain two moving objects and 35 of which contain three moving objects, corresponding to 2 or 3 low dimensional subspaces of the ambient space. The point trajectories are provided in their respective datasets. Some examples of the sequence from the video are shown in Fig. 6.

Example frames videos in the Hopkins 155 datasets
In our experiment, the sequences of 2 motions have N=266 feature trajectories and F=30 frames, while the sequences of 3 motions have N=398 feature trajectories and F=29 frames. We report the segmentation results in Table 4. All the methods show promising low segmentation clustering error. The reason behind this is that the feature trajectories is ideally lie in a low dimension subspace, such that the low dimensional subspace can be easily recovered. It is important to state that though all the methods achieve low error rate, our method outperform other methods and show a little improvement. SSC is state-of-the-art method for motion segmentation, by employing the l q norm for the SSC, the segmentation is further improved. Powered by the l q norm, it’s not surprising that it achieves a lower segmentation error.
Finally, we test the running time of our proposed and several benchmark methods. The results are shown in Table 5. LSR achieves the lowest computational time, as it only involving the matrix computation. LRR involves more computational time due to the performing SVD at each iteration. Our algorithm iteratively solve the l q norm minimization, it may need a little extra computational cost relative to l 1 norm based SSC, which has closed form solution. The extra running time in comparison to l 1 norm minimization is worth as it improves motion segmentation accuracy, yet the additional computational cost is inexpensive and tolerable. Though smooth IRLS iteratively find the sparse solution, it can easily parallel to accelerate the computational process. Note that the compared results of running time of our method does not employ any accelerate technique. The implementation of our method is merely written with pure Matlab code for fair of comparisons.
6 Conclusion
In this work, we study the l q norm based sparse subspace clustering method, building upon the recent work that l q norm can enhance sparsity compared to traditional convex regularizations. For better solving this problem, the ADMM based framework is employed to split the problem into multiple terms, such that the non-convex and non-smooth l q norm term can be solved by the smooth IRLS algorithm. We analysis the mechanism of smooth IRLS algorithm for l q minimization and its convergence property, then unify ADMM and smooth IRLS for solving l q norm based SSC problem. Compared to traditional convex optimization, the proposed method achieves higher clustering accuracy. The benefits of our model is that, it can easily extend to many non-convex and non-smooth regularization problems, such as SCAD, LSP, Logarithm and Capped norm regularizations(see [36] and reference therein), which all provide natural procedures for sparse recovery, but have not been well developed for subspace clustering problem. We believe that the study of unifying ADMM and smooth IRLS for l q SSC will also suit for those non-convex non-smooth regularizations. As future work, we plan to study those regularizations for the SSC problem under the ADMM and IRLS framework. We believe that the proposed method will shed light on the further research of other non-convex regularizations. Though our algorithm achieves higher clustering accuracy, it results in additional computational time. We aim at designing and investigating more efficient algorithm to overcome this problem in future.
References
Basri R, Jacobs DW (2001) Lambertian reflectance and linear subspaces. International Conference on Computer Vision
Basri R, Jacobs D W (2003) Lambertian reflectance and linear subspaces. IEEE Trans Pattern Anal Mach Intell 25.2:218–233
Boyd S, et al. (2011) Distributed optimization and statistical learning via the alternating direction method of multipliers. Found Trends Mach Learn 3.1:1–122
Candes EJ, Wakin MB, Boyd SP (2008) Enhancing sparsity by reweighted l1 minimization. J Fourier Anal Appl 14.5–6:877–905
Cheng W, Chow T WS, Zhao M (2016) Locality constrained-p sparse subspace clustering for image clustering[J]. Neurocomputing 205:22–31
Daubechies I, et al. (2010) Iteratively reweighted least squares minimization for sparse recovery. Commun Pure Appl Math 63.1:1–38
Deng Y, et al. (2013) Low-rank structure learning via nonconvex heuristic recovery. IEEE Trans Neural Netw Learn Syst 24.3:383–396
Dyer E L, Sankaranarayanan A C, Baraniuk R G (2013) Greedy feature selection for subspace clustering[J]. J Mach Learn Res 14(1):2487–2517
Dyer EL, et al. (2015) Self-expressive decompositions for matrix approximation and clustering. arXiv preprint arXiv:1505.00824
Elhamifar E, Vidal R (2013) Sparse subspace clustering: algorithm, theory, and applications. IEEE Trans Pattern Anal Mach Intell 35.11:2765–2781
Feng J, Lin Z, Xu H, et al. (2014) Robust subspace segmentation with block-diagonal prior[C]. In: IEEE Conference on computer vision and pattern recognition (CVPR), 2014. IEEE, pp 3818–3825
Fornasier M, Rauhut H, Ward R (2011) Low-rank matrix recovery via iteratively reweighted least squares minimization. SIAM J Optim 21.4:1614–1640
Fornasier M, et al. (2015) Conjugate gradient acceleration of iteratively re-weighted least squares methods. arXiv preprint arXiv:1509.04063
Guo S, Wang Z, Ruan Q (2013) Enhancing sparsity via l p (0 < p < 1) minimization for robust face recognition. Neurocomputing 99:592–602
He R, et al. (2015) Robust subspace clustering with complex noise. IEEE Trans Image Process 24.11:4001–4013
Heckel R, B?lcskei H (2013) Robust subspace clustering via thresholding[J]. arXiv preprint arXiv:1307.4891
Heckel R, Tschannen M, Bölcskei H (2015) Dimensionality-reduced subspace clustering[J]. arXiv preprint arXiv:1507.07105
Huang S-Y, Yeh Y-R, Eguchi S, Candes E J, Li X, Ma Y, Wring J (2009) Robust principal component analysis. J Assoc Comput Mach 53(3):3179–213
Hund M, Böhm D, Sturm W, et al. (2016) Visual analytics for concept exploration in subspaces of patient groups[J]. Brain Inform:1–15
Lai M-J, Wang J (2011) An unconstrained l q minimization with l q for sparse solution of underdetermined linear systems. SIAM J Optim 21.1:82–101
Lai M-J, Yangyang X, Yin W (2013) Improved iteratively reweighted least squares for unconstrained smoothed ł q minimization. SIAM J Numer Anal 51.2:927–957
Liu G, Lin Z, Yong Y (2010) Robust subspace segmentation by low-rank representation. In: Proceedings of the 27th international conference on machine learning (ICML-10)
Liu J, Chen Y, Zhang J, et al. (2014) Enhancing low-rank subspace clustering by manifold regularization[J]. IEEE Trans Image Process 23(9):4022–4030
Lu C (2012) Robust and efficient subspace segmentation via least squares regression, ECCV. pp 1–14
Lu C, Lin Z, Yan S (2015) Smoothed low rank and sparse matrix recovery by iteratively reweighted least squares minimization. IEEE Trans Image Process 24.2:646–654
Peng X, Yi Z, Tang H (2015) Robust subspace clustering via thresholding ridge regression. In: AAAI Conference on artificial intelligence (aaaI)
Soltanolkotabi M, Elhamifar E, Candes E J (2014) Robust subspace clustering. Ann Stat 42.2:669–699
Sui Y, Zhang S, Zhang L (2015) Robust visual tracking via sparsity-induced subspace learning[J]. IEEE Trans Image Process 24(12):4686–4700
Tron R, Vidal R (2007) A benchmark for the comparison of 3-d motion segmentation algorithms. In: IEEE Conference on computer vision and pattern recognition, 2007. CVPR’07. IEEE
Vidal R, Favaro P (2014) Low rank subspace clustering (LRSC). Pattern Recog Lett 43:47–61
Wang S, Yuan X, Yao T, Yan S (2011) Efficient subspace segmentation via quadratic programming. In: Proc. Twenty-Fifth AAAI conf. artif. intell., pp 519–524
Wen J, Li D, Zhu F (2015) Stable recovery of sparse signals via lp-minimization. Appl Comput Harm Anal 38.1:161–176
Xu J, et al. (2015) Reweighted sparse subspace clustering. Comput Vis Image Understand
Yang AY, et al. (2013) Fast-minimization algorithms for robust face recognition. IEEE Trans Image Process 22.8:3234–3246
You C, Vidal R (2015) Subspace-sparse representation. arXiv preprint arXiv:1507.01307
Zhang C H, Zhang T (2012) A general theory of concave regularization for high-dimensional sparse estimation problems[J]. Stat Sci:576–593
Zhang Y, et al. (2013) Robust subspace clustering via half-quadratic minimization. In: 2013 IEEE International conference on computer vision (ICCV). IEEE
Acknowledgments
This work is partially supported by NSF of China under Grant 61672548, 61173081, and the Guangzhou Science and Tech-nology Program, China, under Grant 201510010165.
Author information
Authors and Affiliations
Corresponding author
Appendix: Proof of the Theory 1
Appendix: Proof of the Theory 1
To prove Theorem 1, let \(u = z^{(j)} - \frac {1}{\rho } w^{(j)}\) , and u is a constant here. Firstly, for j=1,..,d
Then
Note that f(x)=x q/2(0 < q < 1) is a concave function, for any y,z∈R 1
Using (30), we have
By using the rule of (30), the left part of (31) can be transformed as
We now consider the (18), multiplying (x (k)−x (k+1))′ on both sides
Simplify (32) and get (33), then convert it as follows
Note that f(x)=x 2 is a concave function, then for all y,z∈R d
By employing this inequality, we have
This prove that J(x,𝜖) is an decreasing sequence. Note that
Thus the sequence {x (k)} is bounded. Furthermore, if 𝜖>0, the boundedness of {x (k))} implies that there exists a subsequence {x (k j )} converging to some point x 𝜖 ∗, Note that \(||x^{(k+1)} - x^{(k)}||_{2} \rightarrow 0\), thus the subsequence x (k j ) also converges to x 𝜖 ∗. Consider the subsequence in the (18)
Let \(k_{j} \rightarrow \infty \), we get
Therefore, x 𝜖 ∗ is a critical point of (18).
Rights and permissions
About this article

Cite this article
Kuang, S., Chao, H. & Yang, J. Efficient l q norm based sparse subspace clustering via smooth IRLS and ADMM. Multimed Tools Appl 76, 23163–23185 (2017). https://doi.org/10.1007/s11042-016-4091-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11042-016-4091-x