
Abstract
This paper proposes and analyzes the Morley element method for the Cahn–Hilliard equation. It is a fourth order nonlinear singular perturbation equation arises from the binary alloy problem in materials science, and its limit is proved to approach the Hele-Shaw flow. If the \(L^2(\Omega )\) error estimate is considered directly as in paper [14], we can only prove that the error bound depends on the exponential function of \(\frac{1}{\epsilon }\). Instead, this paper derives the error bound which depends on the polynomial function of \(\frac{1}{\epsilon }\) by considering the discrete \(H^{-1}\) error estimate first. There are two main difficulties in proving this polynomial dependence of the discrete \(H^{-1}\) error estimate. Firstly, it is difficult to prove discrete energy law and discrete stability results due to the complex structure of the bilinear form of the Morley element discretization. This paper overcomes this difficulty by defining four types of discrete inverse Laplace operators and exploring the relations between these discrete inverse Laplace operators and continuous inverse Laplace operator. Each of these operators plays important roles, and their relations are crucial in proving the discrete energy law, discrete stability results and error estimates. Secondly, it is difficult to prove the discrete spectrum estimate in the Morley element space because the Morley element space intersects with the \(C^1\) conforming finite element space but they are not contained in each other. Instead of proving this discrete spectrum estimate in the Morley element space, this paper proves a generalized coercivity result by exploring properties of the enriching operators and using the discrete spectrum estimate in its \(C^1\) conforming relative finite element space, which can be obtained by using the spectrum estimate of the Cahn–Hilliard operator. The error estimate in this paper provides an approach to prove the convergence of the numerical interfaces of the Morley element method to the interface of the Hele-Shaw flow.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Consider the following Cahn–Hilliard problem:
where \(\Omega \subseteq \mathbf {R}^2\) is a bounded domain, f(u) is the first derivative of a double well potential F(u) which is defined below
The Allen–Cahn equation [3, 5, 11, 16, 18, 19, 23, 24], which is a second order nonlinear parabolic equation, describes the phase separation process of a binary alloy when the temperature suddenly decreases, but the mass of each phase is not conserved. Compared with the Allen–Cahn equation, the Cahn–Hilliard equation (1) also arises from the phase transition problem in materials science, but it has the mass conservation property. Notice equation (1) differs from the original Cahn–Hilliard equation by scaling \(\frac{t}{\epsilon }\) by t. The Cahn–Hilliard equation finds its applications in the areas of materials science, fluid mechanics, biology and so on, and the coupling of the Cahn–Hilliard equation and fluid flow is becoming more and more popular in industrial applications. The Cahn–Hilliard equation also serves as a building block for the phase field formulations of the moving interface problems, and the methodology can be applied to other phase field models. It is also well known [2] that the Cahn–Hilliard equation (1) can be interpreted as the \(H^{-1}\) gradient flow of the Cahn–Hilliard energy functional
Stoth proved that \(u\rightarrow \pm 1\) in the interior or exterior of interface \(\Gamma _t\) for all \(t\in [0,T]\) as \(\epsilon \rightarrow 0\) for the radially symmetric case [29], and Alikakos, Bates and Chen gave the proof for the general case [2].
Numerical approximations of the Cahn–Hilliard equation have been extensively studied during the last 30 years [4, 12,13,14, 33]. These papers consider the case when \(\epsilon \) is a fixed, and the error bounds depend exponentially on \(\frac{1}{\epsilon }\). Better than the exponential dependence on \(\frac{1}{\epsilon }\), the polynomial dependence on \(\frac{1}{\epsilon }\) is proved using conforming finite element (CG) method [20, 21] and discontinuous Galerkin (DG) method [17, 26]. For the \(C^1\) conforming finite elements for the fourth order problem, polynomials with high degree are required. To use lower order polynomials, one approach is to use macro-elements, where a given element is divided into a few smaller subelements and the lower order polynomial is used on each subelement. However, it is not widely used due to its complex formulation of finite element spaces. The other approach is to use nonconforming finite elements, and among the nonconforming finite elements, the Morley element has the least number of degrees of freedom on each element. Comparing with the mixed finite element method or the \(C^1\) conforming finite element method, the computational cost of the Morley element is smaller, and this is extremely important especially for the phase field problems where the interaction length \(\epsilon \), time step size k, and mesh size h are all required to be chosen very small. The Morley element was first used in [14] to discretize the Cahn–Hilliard equation, but only the error estimates with exponential dependence of \(\frac{1}{\epsilon }\) could be derived there. In this paper, the polynomial dependence of \(\frac{1}{\epsilon }\) is finally given using the Morley element.
The approach in this paper follows those used in [17, 20, 21], but the generalization to the Morley element method is nontrivial. In the mixed CG/DG formulation, different test functions can be chosen in two equations, but in the Morley element formulation, only one test function can be chosen. Because of this and the complex structure of the Morley element formulation, proving the discrete energy law and the discrete stability results become much more involved. It is also a challenge to prove the discrete spectrum estimate in the Morley element space from the spectrum estimate of the Cahn–Hilliard operator because the Morley element space has intersection with its \(C^1\) conforming relative finite element space but they are not contained in each other. If the \(L^2\) error estimate is considered directly, the generalized coercivity result in this paper or even the discrete spectrum estimate are not useful in proving the \(L^2\) error estimate. To overcome these difficulties, there are three main techniques in this paper. First, based on the structure of the bilinear form of the Morley element formulation, this paper designs four discrete operators \(\hat{\Delta }^{-1}_h, \widetilde{\Delta }^{-1}_h\), \(\underline{\Delta }^{-1}_h\) and \(\Delta ^{-1}_h\), and proves the errors in different norms between these operators. Through these relations, by using \(\widetilde{\Delta }^{-1}_h\) in the test function, and by using the other operators as bridges, we can prove the discrete energy law and some consequent discrete stability results. Each of these operators plays important roles in proving the main results. These operators and their properties might be applied to the analysis for the biharmonic equation. It also employs both the summation by part for time and integration by part for space techniques to handle the nonlinear term and then to establish the polynomial dependence of the \(\Vert \cdot \Vert _{2,2,h}\) stability result, and only the exponential dependence can be obtained if these two techniques are not used simultaneously. Second, instead of proving the discrete spectrum estimate, this paper proves the generalized coercivity result which is sufficient to get the sharper error estimates. The key point is to use the enriching operator as a bridge between the nonconforming and conforming finite elements, and this idea may be extended to other phase field models. Third, if the discrete \(L^2\) error estimate is considered directly, only the error estimates with exponential dependence on \(\frac{1}{\epsilon }\) could be derived using the Gronwall’s inequality as in [14]. This paper provides a possibility by considering the \(H^{-1}\) error estimate first, and it explains how to utilize the discrete inverse Laplace operators and the generalized coercivity result to circumvent the Gronwall’s inequality, and finally to prove the error estimate with polynomial dependence on \(\frac{1}{\epsilon }\).
The remainder of this paper is organized as follows. In Sect. 2, we introduce the standard function and Sobolev space notations, state a few a priori estimates of the solution, and cite some known results including properties of the inverse Laplapce operators, properties of enriching operator, generalized discrete Gronwall’s inequality and the spectrum estimate for the linearized Cahn–Hilliard operator; In Sect. 3, and in the first two subsections, we introduce the Morley element formulation, define different kinds of discrete inverse Laplace operators and state their relations. Then in the last three subsections, we analyze the discrete energy law and the discrete stability results, derive the generalized coercivity result in the Morley element space, and finally prove the discrete \(H^{-1} \) error estimate with polynomial dependence on \(\frac{1}{\epsilon }\); In Sect. 4, numerical experiments are given to validate the theoretical results.
2 Preliminaries
In this section, we cite some known results about problems (1)–(4), and they will be used in the following sections. These results can be proved under some general assumptions on the initial condition [11, 17, 20, 21, 26]. Throughout this paper, C denotes a generic positive constant, which may have different values at different occasions, is independent of interfacial length \(\epsilon \), spacial size h, and time step size k. The following Sobolev notations are used in this paper, i.e., for any set A,
If A is the whole domain, i.e., \(A=\Omega \), then \(\Vert \cdot \Vert _{H^k}, \Vert \cdot \Vert _{L^k}\) are used to simplify the notations \(\Vert \cdot \Vert _{H^k(\Omega )}, \Vert \cdot \Vert _{L^k(\Omega )}\) respectively. Besides, assume \({\mathcal {T}}_h\) to be a family of quasi-uniform triangulations of domain \(\Omega \), and \(\mathcal {E}_h\) to be a collection of edges, then for any triangle \(K\in {\mathcal {T}}_h\), define the following mesh dependent semi-norm, norm and inner product
Theoretically, the tanh profile of the initial condition \(u_0\) is required to prove the relations between the Cahn–Hilliard equation and the Hele-Shaw flow [2, 11]. Because of the tanh profile, the following assumptions can be made on the initial condition, and they were used to derive a priori estimates for the solution of problems (1)–(4) [17, 20, 21, 26].
General Assumption (GA)
-
(1)
Assume that \(m_0\in (-1,1)\) where
$$\begin{aligned} m_0:=\frac{1}{|\Omega |}\int _{\Omega }u_0(x)dx. \end{aligned}$$(6) -
(2)
There exists a nonnegative constant \(\sigma _1\) such that
$$\begin{aligned} J_{\epsilon }(u_0)\le C\epsilon ^{-2\sigma _1}. \end{aligned}$$(7) -
(3)
There exists nonnegative constants \(\sigma _2\), \(\sigma _3\) and \(\sigma _4\) such that
$$\begin{aligned} \big \Vert -\epsilon \Delta u_0 +\epsilon ^{-1} f(u_0)\big \Vert _{H^{\ell }} \le C\epsilon ^{-\sigma _{2+\ell }}\qquad \ell =0,1,2. \end{aligned}$$(8)
Under the above assumptions, the following a priori estimates of the solution were proved in [17, 20, 21, 26].
Theorem 1
The solution u of problems (1)–(4) satisfies the following energy estimate:
Moreover, suppose that (6)–(8) hold, \(u_0\in H^4(\Omega )\) and \(\partial \Omega \in C^{2,1}\), then u satisfies the additional estimates:
Furthermore, if there exists \(\sigma _5>0\) such that
then there holds
where
The next lemma gives an \(\epsilon \)-independent low bound for the principal eigenvalue of the linearized Cahn–Hilliard operator, and a proof of this lemma can be found in [11].
Lemma 1
Suppose that (6)–(8) hold. Given a smooth initial curve/surface \(\Gamma _0\), let \(u_0\) be a smooth function satisfying \(\Gamma _0 = \{x\in \Omega ; u_0(x)=0\}\) and some profile described in [11]. Let u be the solution to problems (1)–(4). Define \(\mathcal {L}_{CH}\) as
Then there exists \(0<\epsilon _0<<1\) and a positive constant \(C_0\) such that the principle eigenvalue of the linearized Cahn–Hilliard operator \(\mathcal {L}_{CH}\) satisfies
for \(t\in [0,T]\) and \(\epsilon \in (0,\epsilon _0)\).
Remark 1
-
1.
A discrete version of the spectrum estimate of (15) on conforming finite element spaces was proved in [20, 21], and a discrete version on discontinuous Galerkin finite element space was proved in [17]. They play crucial roles in the proofs of the convergence of the numerical interfaces to the Hele-Shaw flow [17, 20, 21].
-
2.
In the assumption, the initial function \(u_0\) should be chosen to satisfy some profile to guarantee the convergence results. A simple function satisfying this profile is \(u_0=\tanh (\frac{d_0(x)}{\epsilon })\), where \(d_0(x)\) denotes the signed distance function to the initial interface \(\Gamma _0\). Assume u is an arbitrary function, instead of being the solution of the Cahn–Hilliard equation, we can find a low bound of \(\lambda _{CH}\), which depends on \(\frac{1}{\epsilon }\) polynomially, by interpolating \(L^2(\Omega )\) space to \(H^1(\Omega )\) and \(H^{-1}(\Omega )\) spaces.
The classical discrete Gronwall’s inequality is a main technique to derive the error estimates of fully discretized scheme for partial differential equation (PDE) problems. However, for many nonlinear PDE problems, the classical discrete Gronwall’s inequality can not be applied because of nonlinearity. Instead, a generalized version discrete Gronwall’s inequality is needed. In case of the power (or Bernoulli-type) nonlinearity, a generalized continuous Gronwall’s inequality was proved in [22], and its discrete counterpart is stated below. The proof of this generalized discrete Gronwall’s inequality can be found in [28].
Lemma 2
Let \(\{S_{\ell } \}_{\ell \ge 1}\) be a positive nondecreasing sequence and \(\{b_{\ell }\}_{\ell \ge 1}\) and \(\{k_{\ell }\}_{\ell \ge 1}\) be nonnegative sequences, and \(p>1\) be a constant. If
then
where
Denote \(L^2_0(\Omega )\) as the space of functions with zero mean, then for \(\Phi \in L^2(\Omega )\), let \(u := -\Delta ^{-1}\Phi \in H^2(\Omega )\cap L^2_0(\Omega )\) such that
Then we have
For \(v\in L_0^2(\Omega )\) and \(\Phi \in L_0^2(\Omega )\), define the continuous \(H^{-1}\) inner product by
When \(\Phi \in L^2_0(\Omega )\), define the induced continuous \(H^{-1}\) norm by
Next define the Morley element spaces \(S_h\) below [9, 10, 14]:
Through the the paper, we assume
where \(u_h^n\) is defined in (32)–(33) and \(\gamma _1\) is a constant. Theoretically there is no analysis to prove the discrete maximum principle for the Cahn–Hilliard equation. However, numerically we can verify (23) for many initial conditions. In Sect. 4, two examples are given, and we find \(\gamma _1=0\) and \(C=1\) in these cases.
We use the following notation
Corresponding to \(H^j_E(\Omega )\), define \(S^h_E\) as the subspace of \(S^h\) below:
To the end, the enriching operator \({\widetilde{E}}\) is restated [8,9,10]. Let \(\widetilde{S}_E^h\) be the Hsieh-Clough-Tocher macro element space, which is an enriched space of the Morley finite element space \(S_E^h\). Let p and m be the internal vertices and midpoints of triangles \({\mathcal {T}}_h\). Define \({\widetilde{E}}: S_E^h\rightarrow \widetilde{S}_E^h\) by
where \(v_i=v|_{T_i}\) and triangle \(T_i\) contains p as a vertex.
Define the interpolation operator \(I_h: H^2_E(\Omega )\rightarrow S_E^h\) such that
where p ranges over the internal vertices of all the triangles T, and m ranges over the midpoints of all the edges e.
It can be proved that [8,9,10, 14]
3 Fully Discrete Approximation
In this section, the Morley element is used to discretize the fourth order Cahn–Hilliard problems (1)–(4). Different kinds of discrete inverse Laplace operators are defined in order to derive the discrete energy law and error estimates. The optimal \(\Vert \cdot \Vert _{2,2,h}\) error orders are obtained under a weaker regularity assumption, i.e., \(v\in H^{3,h}(\Omega )\). This can be considered as a generalization of the regularity assumption in paper [14]. Besides, it is proved that the error bounds depend on \(\epsilon ^{-1}\) in lower order polynomial, instead of in exponential order. The crux part to prove the error bounds is to prove the generalized coercivity result in the Morley element space, where the enriched finite element space is used as a bridge.
3.1 Formulation
The weak form of (1)–(3) is to seek \(u(\cdot ,t)\in H^2_E(\Omega )\) such that
where the bilinear form \(a(\cdot ,\cdot )\) is defined as
with Poisson’s ratio set to \(\frac{1}{2}\).
It can be verified that [25] for any \(w\in H^2(\Omega )\),
and when w, z are sufficiently smooth,
where n, s denote the normal and tangential directions respectively.
Define the following spaces
where, for instance,
Next define the discrete bilinear form
To introduce the elliptic projection \(P_h\) [14], we first define
Then for arbitrary \(v\in R\), define the following elliptic projection \(P_h\) by seeking \(P_hv\in S_E^h\) such that
where
Notice here \(\alpha >\frac{C}{\epsilon ^3}\) should be chosen to guarantee the coercivity of \(\tilde{b}_h(v,w)\) because by the proof of Lemma 2.4 in [14], when \(z\in H^{2,h}(\Omega )\), we have
Based on the above bilinear form, our fully discrete Galerkin method is to find \(u_h^n\in S^h_E\) such that
where the difference operator \(d_tu_h^{n} := \frac{u_h^{n}-u_h^{n-1}}{k}\), and \(u_0^h := P_hu(t_0)\) .
3.2 The \(\Vert \cdot \Vert _{2,2,h}\) and \(\Vert \cdot \Vert _{1,2,h}\) Errors Under Weaker Regularity Assumptions
In Sect. 5 of paper [14], the projection errors in \(\Vert \cdot \Vert _{2,2,h}\) and \(\Vert \cdot \Vert _{1,2,h}\) norms are proved under the assumption that the exact solution \(u\in H^4(\Omega )\). In this paper, \(\hat{\Delta }_h^{-1}\zeta \) is defined in (37), which can be considered as a novel projection of \(\Delta ^{-1}\zeta \) where \(\zeta \in S_E^h\), and we also give the error bounds between \(\Delta ^{-1}\zeta \) and \(\hat{\Delta }_h^{-1}\zeta \) under the assumption that \(\Delta ^{-1}\zeta \in H^2(\Omega )\cap H^{3,h}(\Omega )\). In this case, notice here \(\Delta ^{-1}\zeta \) does not need to be related to the exact solution, even we define the bilinear form to be equal to the right-hand side (see Remark 4 below for details).
First we cite Lemma 2.5 in [14], which will be used in this paper.
Lemma 3
Let \(z\in H_E^{2,h}(\Omega )\) and \(w\in H^2_E(\Omega )\cap W^{3,p}(\Omega )\), and define \(B_h(w,z)\) by
then we have
Next some mesh-dependent discrete inverse Laplace operators are given here. Define space \(W_h\) by
Then we can define the discrete inverse Laplace operator \(\underline{\Delta }_h^{-1}: L^2(\Omega )\rightarrow {W}_h\) as follows: given \(\zeta \in L^2(\Omega )\), define \(\underline{\Delta }_h^{-1}\zeta \in {W}_h\) such that
Therefore, \(-\underline{\Delta }_h^{-1}\zeta \) can be considered as a projection of \(-\Delta ^{-1}\zeta \).
As a comparison, we define the discrete inverse Laplace operator \(\Delta _h^{-1}: L^2(\Omega )\rightarrow {W}_h\) as follows: given \(\zeta \in L^2(\Omega )\), define \(\Delta _h^{-1}\zeta \in {W}_h\) such that
Furthermore, define \(\widetilde{\Delta }_h^{-1}, \hat{\Delta }_h^{-1}: S_E^h\rightarrow S_E^h\) as follows: given \(\zeta \in S_E^h\), let \(\widetilde{\Delta }_h^{-1}\zeta , \hat{\Delta }_h^{-1}\zeta \in S_E^h\) such that
where \(b_h(u,v):=a_h(u,v)+\beta (u,v)\), and \(\beta \) is a positive number to guarantee the coercivity of \(b_h(u,v)\), i.e., \(\beta =1\) by the proof of Lemma 2.4 in [14].
For any \(v\in H^{3}(\Omega )\), it always holds that
Corresponding to operator \(\hat{\Delta }_h^{-1}\), for any \(v\in H^{3}(\Omega )\), define \(v_h\in S_E^h\) by
Corresponding to operator \(\widetilde{\Delta }_h^{-1}\), for any \(v\in H^{3}(\Omega )\), define \(v_h\in S_E^h\) by
By Eqs. (38) and (37), we know
Then it is ready to prove the optimal error estimates of \(\Vert \hat{\Delta }_h^{-1}u-\Delta ^{-1}u\Vert _{1,2,h}\) and \(\Vert \hat{\Delta }_h^{-1}u-\Delta ^{-1}u\Vert _{2,2,h}\) when \(u\in S_E^h\). Notice \(u\in L^2(\Omega )\), but u may not be in \( H^1(\Omega )\). Instead of using properties of the Morley elements (Lemmas 2.1–2.6 in [14]), the enriching operator is perfectly employed to derive the upper bounds.
Lemma 4
Assume \(\hat{\Delta }_h^{-1}\) is defined in (37) and \(u\in S_E^h\), then
Proof
Using (38) and (39), we obtain
Let \(v=\Delta ^{-1}{\widetilde{E}}u\) and \(v_h=\hat{\Delta }_h^{-1}u\), by (24) and the elliptic regularity theory, we have
where the last inequality uses (25), the inverse inequality and the triangle inequality.
On the other hand, using the elliptic regularity theory and (25), we have
Combining (44) and (45), and using the triangle inequality, the theorem can be obtained immediately. \(\square \)
The following lemma is a direct result of Lemma 4.
Lemma 5
Assume \(\hat{\Delta }_h^{-1}\) is defined in (37) and \(u\in S_E^h\), then
Remark 2
-
1.
In (43), if the enriching operator is not introduced, i.e., let \(v=\Delta ^{-1}u\) and \(v_h=\hat{\Delta }_h^{-1}u\), we can only obtain
$$\begin{aligned} \Vert \Delta ^{-1}u-\hat{\Delta }_h^{-1}u\Vert _{2,2,h}\le Ch|\Delta ^{-1}u|_{3,2,h}. \end{aligned}$$In the following part of this paper, u in in the Morley element space \(S_E^h\), which is not in \(H^1(\Omega )\), so the inequality below may be very hard to obtain
$$\begin{aligned} |\Delta ^{-1}u|_{3,2,h}\le Ch\Vert u\Vert _{1,2,h}. \end{aligned}$$
Next we prove the error between \(\Delta ^{-1}\zeta \) and \(\widetilde{\Delta }_h^{-1}\zeta \).
Lemma 6
Assume \(\widetilde{\Delta }_h^{-1}\) is defined in (36) and \(\zeta \in S_E^h\), then
Proof
Notice we will set \(v_h=-\widetilde{\Delta }_h^{-1}\zeta \), so Eq. (40) is used, then \(\hat{F}_h\), instead of \(F_h\), appears in Eq. (46).
Using Lemma 3, we have
Let \(v=-\Delta ^{-1}{\widetilde{E}}\zeta , v_h=-\widetilde{\Delta }_h^{-1}\zeta \), then
Combining (45) and (48), we get the conclusion. \(\square \)
The following bound is a direct result from Lemma 6.
Lemma 7
Assume \(\widetilde{\Delta }_h^{-1}\) is defined in (36) and \(\zeta \in S_E^h\), then
Remark 3
-
1.
Using the theory of enriching operators, instead of the properties of the Morley elements, we can applied the theory in this paper to other nonconforming elements, based on their enriched conforming elements. If properties of the Morley elements are used to get the bound of \(\Vert \Delta ^{-1}\zeta -\hat{\Delta }_h^{-1}\zeta \Vert _{2,2,h}\), we can obtain
$$\begin{aligned} \Vert \Delta ^{-1}\zeta -\hat{\Delta }_h^{-1}\zeta \Vert _{2,2,h}&\le Ch|\Delta ^{-1}\zeta |_{3,2,h}+Ch|\Delta ^{-1}\zeta |_{4,2,h}. \end{aligned}$$ -
2.
Suppose we use the properties of the Morley elements, and we do not employ the enriching operators. When \(\zeta \in S_E^h\), \(\Delta ^{-1}\zeta \) may not be in \(H^2_E(\Omega )\cap W^{3,p}(\Omega )\) so that Lemma 3 can not be applied. Then we can only prove the following lemma when the Poisson’s ratio is 1, which is not physical.
Lemma 8
Let \(z\in H_E^{2,h}(\Omega )\) and \(\Delta w\in S_E^h\), and when Poisson’s ratio is 1, we have
Proof
By Lemma 2.3 in [14] and the inverse inequality, we get when \(w, z\in H_E^{2,h}(\Omega )\), and at least one of them is in \(S_E^h\), then
When Poisson’s ratio is 1, bilinear form \(a_h(u,v)\) in (29) and \(B_h(w,z)\) become
Then we have
Before we give the relations between operators \(\underline{\Delta }_h^{-1}\), \(\Delta _h^{-1}\) and \(\Delta ^{-1}\), we need an extra lemma.
Lemma 9
The operators \(\underline{\Delta }_h^{-1}\) and \(\Delta _h^{-1}\) are defined in (34) and (35), then for any \(\zeta \in L^2(\Omega )\), we have
Proof
Define an elliptic projection \(P_1: L^2(\Omega )\rightarrow V\cap L^2_0\) by
where V can be a conforming space consisting of piecewise polynomials.
Define another elliptic projection \(P_2: H^2(\Omega )\rightarrow V\cap L^2_0\) by
Then we have
\(\square \)
Next some lemmas related to operators \(\underline{\Delta }_h^{-1}\) and \(\Delta _h^{-1}\) are proved below.
Lemma 10
Assume \(\underline{\Delta }_h^{-1}\) is defined in (34) and \(\zeta \in L^2(\Omega )\), then
Proof
Subtracting (35) from (34), choosing \(w_h=\underline{\Delta }_h^{-1}\zeta -\Delta _h^{-1}\zeta \), and using Lemma 9, we obtain
Then the lemma is proved. \(\square \)
Lemma 11
Assume \(\Delta _h^{-1}\) is defined in (35) and \(\zeta \in L^2(\Omega )\), then
Proof
Observe \(\underline{\Delta }_h^{-1}\) is a projection of \(\Delta ^{-1}\), then we can prove
Combining (53) and Lemma 10, and using the triangle inequality, this lemma can be proved. \(\square \)
Remark 4
-
1.
In Lemmas 4–7, the regularity requirement on u is \(\Delta ^{-1}u\in H^{2}(\Omega )\cap H^{3,h}(\Omega )\). It is proved that the error bounds can depend on norm \(\Vert \cdot \Vert _{3,2,h}\), instead of norm \(\Vert \cdot \Vert _{4,2,\Omega }\). Hence the lemmas in this subsection can be considered as a generalization of the error bounds in [14].
-
2.
The idea of proposing the bilinear form \(b_h(\cdot ,\cdot )\) defined in Eq. (38) is that (38) automatically holds for \(\eta \in H^{2,h}_E(\Omega )\), but the bilinear form (5.2b) in [14] holds under the condition that \(u\in H^{4}(\Omega )\). This is the main reason why the regularity requirement in paper [14] can be removed. Another advantage of using this generalized projection is the proofs of the error estimates can be simplified (see proofs of Lemmas 4–5).
3.3 The Discrete Energy Law and the Discrete Stability Results
In order to mimic the continuous energy law in (9), we consider the discrete energy law under some mesh constraints in this subsection. A lemma is needed to prove the discrete energy law. First we give the bound of the \(L^2\) norm interpolation.
Lemma 12
For any \(\zeta \in L^2(\Omega )\), then
Proof
Testing (35) by \(\zeta \), and using Lemma 11, we obtain
When \(Ch\le \frac{1}{2}\), the lemma is proved. \(\square \)
Remark 5
Combine (54) and Lemma 7, we can easily prove
The discrete energy law is proved below.
Theorem 2
Under the assumption (23) and the following mesh constraints
the following energy holds
where
Proof
Taking \(v_h=-\widetilde{\Delta }_h^{-1}(u_h^{n}-u_h^{n-1})\) as the test function in (32), then we have
The first term on the left-hand side of (55) can be written as
where Remark 5 is used in the last inequality.
The second term on the left-hand side of (55) can be written as
where the last inequality hold under the restriction \(k\ge C\beta ^2h^2\).
We now bound the third term on the left-hand side of (55) from below. We consider the case \(f^{n}=(u_h^{n})^3 - u_h^{n}\), and it can be written as
A direct calculation then yields [15]
The third term on the left-hand side of (55) can be written as
Taking the summation over n from 1 to \(\ell \), and restricting k by letting \(k\ge C\frac{h^2}{\epsilon ^{4\gamma _1+3}}\), then the energy law can be obtained by the Gronwall’s inequality. \(\square \)
Remark 6
-
1.
The idea of proving this discrete energy law is to control bad terms in \(M_1\) by terms \(M_2\), which is different from the conforming Galerkin case [20, 21] and the discontinuous Galerkin case [17]. This is one reason why there are some restrictions in this theorem.
-
2.
The constant C in the energy law can be chosen to approach 1 by restricting k as the polynomial of \(\epsilon \) more stringently.
A lemma about summation by parts below is needed in this section.
Lemma 13
Suppose \(\{a_n\}_{n=0}^\ell \) and \(\{b_n\}_{n=0}^\ell \) are two sequences, then
Proof
The lemma can be easily obtained by using the equality below
\(\square \)
Next we prove the \(\Vert u_h^n\Vert _{2,2,h}\) stability results for the cases when \(L^2\) in time (Theorem 3) and \(L^{\infty }\) in time (Theorem 4) are considered, which will be used in proving the generalized coercivity result in the Morley element space.
Theorem 3
Under the mesh constraints in Theorem 2, the following stability result holds
where C is also the \(\epsilon \)-independent constant.
Proof
Taking \(v_h=u_h^{n}\) as the test function in (32), then
The first term on the left-hand side of (60) can be written as
The third term on the left-hand side of (60) can be written as
Taking the summation over n from 1 to \(\ell \) on both sides of (60), multiplying with k, and using Theorem 2, we obtain the conclusion. \(\square \)
Theorem 4
Under the mesh constraints in Theorem 2, and when \(k\ge C\frac{h^4}{\epsilon ^{4+4\gamma _1+2\sigma _1}}(\ln \,\frac{1}{h})^2\) and \(k\ge Ch^2\), the following stability result holds
where \(\gamma _2:=2\gamma _1+\sigma _1+6\) and C is the \(\epsilon \)-independent constant.
Proof
Taking \(v_h=u_h^{n}-u_h^{n-1}\) as the test function in (32), then
The first term on the left-hand side of (63) can be written as
The second term on the left-hand side of (63) can be written as
Using summation by parts in Lemma 13 and integration by parts, then the summation of the third term on the left-hand side of (63) can be written as

where \(\llbracket \cdot \rrbracket \) and \(\{\cdot \}\) denote the jump and the average along the mesh boundaries.
Using the inverse inequality and Theorem 3, when \(k\ge C\frac{h^4}{\epsilon ^{4+4\gamma _1+2\sigma _1}}(\ln \,\frac{1}{h})^2\), we have
where the first inequality uses the proof of Lemma 2.6 in [14] before applying the inverse inequality.
When \(k\ge Ch^2\), using Theorem 2 and the idea of the proof of Lemma 2.1 in [14], it holds for each element K, then the second term can be bounded by
By Theorem 3, the third term and the fourth term can be bounded by
Using Theorem 3, the fifth term can be bounded by
Taking the summation over n from 1 to \(\ell \), and combining (64)–(69), we have
\(\square \)
Remark 7
If \(v_h=u_h^{n}\) or \(v_h=u_h^{n}-u_h^{n-1}\) are chosen as the test function in (32), we can only obtain the \(L^2\) and \(\Vert \cdot \Vert _{2,2,h}\) stability with upper bounds which are exponentially dependent on \(\frac{1}{\epsilon }\).
3.4 The Generalized Coercivity Result in the Morley Element Space
Recall \(\widetilde{S}_E^h\) is the Hsieh-Clough-Tocher macro element space. This \(C^1\) conforming finite element space \(\widetilde{S}_E^h\) is contained in \(H^1(\Omega )\) space, so the following discrete spectrum estimate holds automatically.
Lemma 14
Under the assumptions of Lemma 1, there exists an \(\epsilon \)-independent and h-independent constant \(C_0>0\) such that for \(\epsilon \in (0,1)\) and a.e. \(t\in [0,T]\)
for \(t\in [0,T]\) and \(\epsilon \in (0,\epsilon _0)\).
Before the generalized coercivity result is given, the following lemma is needed. It is about continuous \(H^{-1}(\Omega )\) norm.
Lemma 15
The \(H^{-1}\) norm has the following equivalent forms
Proof
By (20) and the Hölder’s inequality,
Then we have
On the other hand, choose \(\xi =-\Delta ^{-1}\Phi \), then
Then the lemma is proved. \(\square \)
Then we prove the generalized coercivity result in the Morley element space using the properties of the enriching operators.
Theorem 5
Suppose there exist positive numbers \(C_2>0\) and \(\gamma _3>0\) such that the solution u of problems (1)–(4) satisfies
where the existence of \(C_2\) and \(\gamma _3\) can be guaranteed by imbedding the \(L^{\infty }\) space to \(H^2\) space.
Suppose \(\psi \in S_E^h\cap L^2_0(\Omega )\) and the mesh constraints in Theorem 4 hold, then there exists an \(\epsilon \)-independent and h-independent constant \(C>0\) such that for \(\epsilon \in (0,1)\) and a.e. \(t\in [0,T]\)
provided that h satisfies the constraint
where \(C_1\) arises from the following equality:
Proof
Based on the boundness of the exact solution of the Cahn–Hilliard equation, we assume there exists \(C_3\) such that
Then under the mesh constraint (71), we have
Then we have
Then the term N can be bounded by
Besides, using the Lemma 11 and Remark 5, we obtain
Then we have
If \(\psi =P_hu(t_n)-u_h^n\), then by Theorem 4, we have
Define \(\widetilde{\psi }\) by \(\widetilde{\psi }={\widetilde{E}}\psi \), then by (25), we have
Using (77) and Remark 5, we obtain
Using (25), the definition of operator \(\Delta ^{-1}\) and Lemma 15, we obtain
When \(h\le C\epsilon ^{\gamma _1}\), using (78)–(80), and Lemma 14, Eq. (75) can be bounded by
\(\square \)
3.5 The Error Estimates in Polynomial of \(\frac{1}{\epsilon }\)
In this subsection, an error estimate of \(\widetilde{\Delta }_h^{-1}(P_hu(t_n)-u_h^n)\) with polynomial dependence on \(\frac{1}{\epsilon }\) is derived, and as corollaries, error estimates of \(\hat{\Delta }_h^{-1}(P_hu(t_n)-u_h^n)\), \(\Delta ^{-1}(P_hu(t_n)-u_h^n)\), \(\underline{\Delta }_h^{-1}(P_hu(t_n)-u_h^n)\) and \(\Delta _h^{-1}(P_hu(t_n)-u_h^n)\) with polynomial dependence on \(\frac{1}{\epsilon }\) are also given.
Theorem 6
Suppose u is the solution of (1)–(4), \(u_h^n\) is the numerical solution of scheme (32)–(33), and assumption (23) holds. Define \(\theta ^n:=P_hu(t_n)-u_h^n\), then under following mesh constraints
we have the following error estimate
Proof
Using (32)–(33), \(\forall v_h\in S^h_E\), we have
where
It follows from (13) that
Taking \(v_h=-\widetilde{\Delta }_h^{-1}\theta ^n\) in (82), we have
By the definition of \(\Delta _h^{-1}\) and \(\widetilde{\Delta }_h^{-1}\), then we have
When \(h\le C\epsilon ^2k\), using Remark 5, then the first term on the left-hand side of (84) can be bounded by
When \(h\le \frac{C}{\beta }\epsilon ^2\), the third term on the left-hand side of (84) can be bounded by
When \(h\le C\epsilon ^{4\gamma _1+4}\) and \(h\le C\epsilon ^4\), the fourth term on the left-hand side of (84) can be bounded by
For the second term inside the brackets and on the right-hand side of (87), we appeal to Remark 5, the discrete energy law and the following Gagliardo-Nirenberg inequality [1]. Then for any \(K\in \mathcal {T}_h\), we have
When \(h\le C\epsilon ^{\sigma _1+2}\), the second term inside the brackets and on the right-hand side of (87) can be bounded by
The fifth term on the left-hand side of (84) can be bounded by
By the mean value theorem and (11), the first term on the right-hand side of (84) can be bounded by
By the Poincaré inequality and the bounds of \(I_1\) in [32], the summation of the second term on the right-hand side of (84) can be written as
where Lemma 2.3 in [14] is used in the first inequality and
Using Remark 5, then under the mesh constraint \(h\le Ck\) and \(h\le C\epsilon ^4\), the third term on the right-hand side of (84) can be bounded by
where Lemma 2.3 in [14] and the inverse inequality are used in the first inequality.
Combining (85) to (93), we have
Taking the summation for n from 1 to \(\ell \), Eq. (94) can be changed into
Using the generalized coercivity result in Theorem 5, we obtain when \(h\le C\epsilon ^2\), we have
By the discrete energy law and Theorem 3, when \(k\le C\epsilon ^{3\sigma _1+13}\), we have
Let \(d_{\ell }\ge 0\) be the slack variable such that
and define for \(\ell \ge 1\)
then we have
Applying Lemma 2 to \(\{S_\ell \}_{\ell \ge 1}\) defined above, we obtain for \(\ell \ge 1\)
provided that
We note that \(a_s\, (1\le s\le \ell )\) are all bounded as \(k\rightarrow 0\), therefore, (103) holds under the mesh constraint stated in the theorem. Then it follows from (102) and (103) that
Then the theorem is proved. Notice the mesh restrictions are stringent theoretically, and numerically they are much better. \(\square \)
Next we gave a Corollary based on Theorem 6, Lemmas 5–11, and the triangle inequality.
Corollary 1
Assume the mesh constraints in Theorem 6 hold, then the following estimates hold
Remark 8
-
1.
All mesh restrictions have been incorporated into Theorem 6. For example, \(h\le C\epsilon ^4\) can be incorporated into \(h\le C\epsilon ^{4\gamma _1+4}\) since \(\gamma _1\ge 0\), \(k\ge C\frac{h^4}{\epsilon ^{4+4\gamma _1+2\sigma _1}}(\ln \,\frac{1}{h})^2\) in Theorem 4 can be incorporated into \(k\ge C\frac{h^2}{\epsilon ^{4\gamma _1+3}}\) and \(h^2(\ln \,\frac{1}{h})^2\le \epsilon ^{2\sigma _1+1}\), and so on.
-
2.
If \(v_h=-\hat{\Delta }_h^{-1}\theta ^n\), instead of \(v_h=-\widetilde{\Delta }_h^{-1}\theta ^n\), is chosen as the test function in (82), the error estimate can not be obtained due to other terms in the definition of \(-\hat{\Delta }_h^{-1}\).
4 Numerical Experiments
In this section, we present two numerical tests to gauge the performance of the Morley element approximation. The fully implicit scheme and the square domain \(\Omega =[-1,1]^2\) are used in both tests. The degrees of freedom (DOF) are compared for quadratic mixed discontinuous Galerkin method (MDG), \(C^1\) conforming Argyris element, \(C^1\) conforming Hsieh–Clough–Tocher (HCT) macro element, and Morley element in Table 1. From the angle of degrees of freedom, Morley element method is supposed to be very efficient.
Next, two numerical tests are presented to numerically check the discrete maximum principle, which is not known theoretically. See [32] for evolutions of the zero-level sets of the Cahn–Hilliard equation using the Morley elements based on more different initial conditions.
\(\mathbf {Test}\, \mathbf {1.}\) Consider the Cahn–Hilliard equations (1)–(4) with the following initial condition:
where \(d_0(x)=\sqrt{x_1^2+x_2^2}-0.5\), which is the signed distance from any point to the circle \(x_1^2+x_2^2=0.5^2\). Note that \(u_0\) has the desired form as stated in Lemma 1.
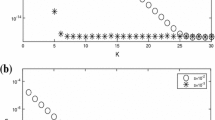
Figure 1 plots the zero-level set of this initial condition and \(L^\infty \) bound \(|u_h^n|_{L^{\infty }}\). We can observe that \(|u_h^n|_{L^{\infty }}\le 1\), which numerically verifies the assumption (23). In this test, the interaction length \(\epsilon =0.05\), the space size \(h=0.04\) and the time step size \(k=0.0001\).

The zero-level set of the initial condition (left) and the \(|u_h^n|_{L^{\infty }}\) bound at different time points (right). In this test, \(\epsilon =0.05,\,h=0.04,\,k=0.0001\)
\(\mathbf {Test}\,\mathbf {2.}\) Consider the Cahn–Hilliard equations (1)–(4) with the following initial condition:
Note that \(u_0\) can be written in the form given in (104) with \(d_0(x)\) being the signed distance function to the initial curve. We note that \(u_0\) does not have the desired form as stated in Lemma 1.
Figure 2 plots the zero-level set of this initial condition and \(L^\infty \) bound \(|u_h^n|_{L^{\infty }}\). We can observe that \(|u_h^n|_{L^{\infty }}\le 1\), which numerically verifies the assumption (23). In this test, the interaction length \(\epsilon =0.025\), the space size \(h=0.02\), and the time step size \(k=0.0001\).

The zero-level set of the initial condition (left) and the \(|u_h^n|_{L^{\infty }}\) bound at different time points (right). In this test, \(\epsilon =0.025,\,h=0.02,\,k=0.0001\)
References
Adams, R.A., Fournier, J.J.F.: Sobolev Spaces, vol. 140. Academic press, London (2003)
Alikakos, N.D., Bates, P.W., Chen, X.: Convergence of the Cahn–Hilliard equation to the Hele-Shaw model. Arch. Ration. Mech. Anal. 128(2), 165–205 (1994)
Allen, S.M., Cahn, J.W.: A microscopic theory for antiphase boundary motion and its application to antiphase domain coarsening. Acta Metall. 27, 1084–1095 (1979)
Aristotelous, A.C., Karakashian, O., Wise, S.M.: A mixed discontinuous Galerkin, convex splitting scheme for a modified Cahn–Hilliard equation. Discount. Cont. Dyn. Syst. Ser. B 18(9), 2211–2238 (2013)
Bartels, S., Müller, R., Ortner, C.: Robust a priori and a posteriori error analysis for the approximation of Allen–Cahn and Ginzburg–Landau equations past topological changes. SIAM J. Numer. Anal. 49(1), 110–134 (2011)
Bazeley, G.P., Cheung, Yo.K., Irons, B.M., Zienkiewicz, O.C.: Triangular elements in plate bending- conforming and non-conforming solutions (Stiffness characteristics of triangular plate elements in bending, and solutions). pp. 547–576 (1966)
Riviere, B.: Discontinuous Galerkin methods for solving elliptic and parabolic equations: theory and implementation. SIAM (2008)
Brenner, S.: Two-level additive Schwarz preconditioners for nonconforming finite element methods. Math. Comput. Am. Math. Soc. 65(215), 897–921 (1996)
Brenner, S.: Convergence of nonconforming multigrid methods without full elliptic regularity. Math. Comput. Am. Math. Soc. 68(225), 25–53 (1999)
Brenner, S.C., Sung, L., Zhang, H., Zhang, Y.: A Morley finite element method for the displacement obstacle problem of clamped Kirchhoff plates. J. Comput. Appl. Math. 254, 31–42 (2013)
Chen, X.: Spectrum for the Allen–Cahn and Cahn–Hilliard and phase-field equations for generic interfaces. Commun. Partial Differ. Equ. 19(7–8), 1371–1395 (1994)
Cheng, K., Feng, W., Wang, C., Wise, S.M.: An energy stable fourth order finite difference scheme for the Cahn–Hilliard equation. J. Comput. Appl. Math. (in press) (2017). arXiv preprint arXiv:1712.06210
Du, Q., Nicolaides, R.A.: Numerical analysis of a continuum model of phase transition. SIAM J. Numer. Anal. 28(5), 1310–1322 (1991)
Elliott, C.M., French, D.A.: A nonconforming finite-element method for the two-dimensional Cahn–Hilliard equation. SIAM J. Numer. Anal. 26(4), 884–903 (1989)
Feng, X., Li, Y.: Analysis of symmetric interior penalty discontinuous Galerkin methods for the Allen–Cahn equation and the mean curvature flow. IMA J. Numer. Anal. 35(4), 1622–1651 (2015)
Feng, X., Li, Y., Prohl, A.: Finite element approximations of the stochastic mean curvature flow of planar curves of graphs. Stoch. Partial Differ. Equ. Anal. Comput. 2(1), 54–83 (2014)
Feng, X., Li, Y., Xing, Y.: Analysis of mixed interior penalty discontinuous galerkin methods for the Cahn–Hilliard equation and the Hele-Shaw flow. SIAM J. Numer. Anal. 54(2), 825–847 (2016)
Feng, X., Li, Y., Zhang, Y.: Finite element methods for the stochastic Allen–Cahn equation with gradient-type multiplicative noise. SIAM J. Numer. Anal. 55(1), 194–216 (2017)
Feng, X., Prohl, A.: Numerical analysis of the Allen–Cahn equation and approximation for mean curvature flows. Numer. Math. 94, 33–65 (2003)
Feng, X., Prohl, A.: Error analysis of a mixed finite element method for the Cahn–Hilliard equation. Numer. Math. 74, 47–84 (2004)
Feng, X., Prohl, A.: Numerical analysis of the Cahn–Hilliard equation and approximation for the Hele-Shaw problem. Int Free Bound. 7, 1–28 (2005)
Feng, X., Wu, H.: A posteriori error estimates and an adaptive finite element method for the Allen–Cahn equation and the mean curvature flow. J. Sci. Comput. 24(2), 121–146 (2005)
Ilmanen, T.: Convergence of the Allen–Cahn equation to Brakke’s motion by mean curvature. J. Diff. Geom. 38(2), 417–461 (1993)
Kovács, M., Larsson, S., Mesforush, A.: Finite element approximation of the Cahn–Hilliard–Cook equation. SIAM J. Numer. Anal. 49(6), 2407–2429 (2011)
Lascaux, P., Lesaint, P.: Some nonconforming finite elements for the plate bending problem, Revue française d’automatique, informatique, recherche opérationnelle. Anal. Numér. 9(R1), 9–53 (1975)
Li, Y.: Numerical methods for deterministic and stochastic phase field models of phase transition and related geometric flows. Ph.D. thesis, The University of Tennessee (2015)
Nilssen, T., Tai, X.-C., Winther, R.: A robust nonconforming \(H^2\)-element. Math. Comput. 70(234), 489–505 (2001)
Pachpatte, B.G.: Inequalities for Finite Difference Equations. Pure and Applied Mathematics, vol. 247. CRC Press, Boca Raton (2011)
Stoth, B.E.E.: Convergence of the Cahn-Hilliard equation to the Mullins-Sekerka problem in spherical symmetry. J. Diff. Eqs. 125(1), 154–183 (1996)
Wang, M.: On the necessity and sufficiency of the patch test for convergence of nonconforming finite elements. SIAM journal on numerical analysis 39(2), 363–384 (2001)
Wang, M., Xu, J.: The Morley element for fourth order elliptic equations in any dimensions. Numerische Mathematik 103(1), 155–169 (2006)
Wu, Shuonan, Li, Yukun: Analysis of the Morley elements for the Cahn-Hilliard equation and the Hele-Shaw flow, (2018). submitted, arXiv preprint arXiv:1808.08581
Xu, Jinchao, Li, Yukun, Wu, Shuonan: Convex splitting schemes interpreted as fully implicit schemes in disguise for phase field modeling. Computer Methods in Applied Mechanics and Engineering, accepted (2016). arXiv preprint arXiv:1604.05402
Acknowledgements
The author Yukun Li highly thanks Professor Xiaobing Feng in the University of Tennessee at Knoxville for his valuable suggestions during the whole process of preparation of this manuscript, and Dr. Shuonan Wu in the Peking University for proofreading this manuscript carefully and giving lots of useful suggestions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Li, Y. Error Analysis of a Fully Discrete Morley Finite Element Approximation for the Cahn–Hilliard Equation. J Sci Comput 78, 1862–1892 (2019). https://doi.org/10.1007/s10915-018-0834-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-018-0834-3