
Abstract
In this paper, we propose an efficient method for solving coupled Lane–Emden boundary value problems in catalytic diffusion reactions. The target is to obtain approximations of coupled Lane–Emden boundary value problems via series representation. Convergence and an error estimate are presented. Finally, two BVPs are solved to illustrative high accuracy of our method. Furthermore, our algorithm is easy to implement.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Lane [1] and Emden [2] first studied the Lane–Emden equation. The applications of the Lane–Emden equation are found in many research fields like the theory of stellar structure, the thermal behavior of a spherical cloud of gas, isothermal gas spheres and the theory of thermionic currents [3]. Since the exact solution of the Lane–Emden equation does not exist in many cases, various methods [4,5,6,7,8,9,10] have been developed for solving such problem. The singular behavior is the main difficulty of the Lane–Emden equation.
In this work, we mainly consider systems of Lane–Emden equations. Such equations model several physical phenomenon such as chemical reactions, population evolution and so on [11]. In next section, we propose a numerical method for solving the following coupled Lane–Emden equation
subject to
where r is a real constant and \(f_1(u(x),v(x))\) and \(f_2(u(x),v(x))\) are arbitrary functions of u and v. Also, several numerical methods have been developed for solving systems of Lane–Emden equations. Rach et al. [3, 12] proposed a modified recursion scheme based on the Adomian decomposition method. Geng and Cui [13] provided homotopy perturbation reproducing kernel method. Lu [14] developed variational iteration method. Dehghan [15,16,17] presented homotopy perturbation method, sinc-collocation and cubic B-spline scaling function methods. Caglar [18] introduced B-spline method for solving linear systems.
This work is mainly based on Turkyilmazoglu’s works [19,20,21] and our previous work [22]. By using this method, a rapid convergent series solution can be obtained.
The reminder of this paper is organized as follows. A new numerical method is described in Sect. 2. In Sect. 3, convergence and an error estimate are presented. In Sect. 4, two BVPs are solved and our method is compared to existing numerical methods. Finally, our conclusions are made in Sect. 5.
2 A new algorithm
In this section we provide a new algorithm. Considering the base functions
which reside in the function space where the true exact of (1) exists, then the exact solution of (1) is
where \(a_{k}\)’s and \(b_{k}\)’s are coefficients to be determined.
By means of the definitions
and
thus we may approximate the solution at nth order by the product form
whose derivatives of N order are given by
where matrix \(\mathbf {P}\) depends on the choice of \(\mathbf {X}_{n}\). Having denoted the Hilbert space \(H=L^2[0,1]\) with the inner product
Substituting (7) and (8) into (1),
Let \(\mathbf {Q}=[\psi _0(x),\psi _1(x),\psi _2(x),\ldots ,\psi _n(x)]\) be a linearly independent set of functions in H, whose entries might be standard polynomials. Taking the inner product of (10) and (11) with the elements of \(\mathbf {Q}\) , matrices \(\mathbf {S}_{2(n+1)\times 1}\) and \(\mathbf {T}_{2(n+1)\times 1}\) can be obtained, which satisfy
Notice that
where \(1\le q\le n+1\),
and
where \(n+2\le q\le 2n+2\).
Considering the initial or boundary conditions (2),
These 4 equations modify 4 number of entries of \(\mathbf {S}_{2(n+1)\times 1}\) and the corresponding parts of \(\mathbf {T}_{2(n+1)\times 1}\). The elements of \(\mathbf {A}_{n}\) and \(\mathbf {B}_{n}\) are determined uniquely, if the system of nonlinear algebraic equations \(\mathbf {S}=\mathbf {T}\) is solved properly. Eventually, the concrete form of the approximate solution can be obtained
Note that when choosing base functions \(\mathbf {X}_{n}\), continuous polynomials \(\{x^k:k\in \mathbb {Z}\}\) are preferred. Since they are calculated efficiently and can represent various functions [19]. Then the entries of the matrix \(\mathbf {P}\) are expressed as \(\mathbf {P}_{i,i+1}=i\), \(1\le i\le n\) and \(\mathbf {P}_{ij}=0\) for other \(1\le i,j\le n+1\), which means

3 Error estimate and convergence
In this section, the numerical analysis is presented. Let \(H=L^2[0,1]\), \(P_n=\{\phi _0,\phi _1,\ldots ,\phi _n\}\) be a set of polynomials of nth degree and \(Y=span(P_n)\). The \(L_2\)-error can be obtained by the similar process which was shown in [20]. Since Y is a finite dimensional vector space, y has a unique best approximation in Y. Thus, there exists \(\bar{u}, \bar{v}\in Y\) which satisfy
Let \(\varvec{\Phi }=[\phi _0,\phi _1,\ldots ,\phi _n]^T\), there exists unique coefficients \(\mathbf {A}=[a_0,a_1,\ldots ,a_n]\) and \(\mathbf {B}=[b_0,b_1,\ldots ,b_n]\) such that
where \(\mathbf {A}\) and \(\mathbf {B}\) can be obtained by the following process.
where
and \(\langle \varvec{\Phi },\varvec{\Phi }\rangle \) is given by
Then
and
Since the elements of \(\mathbf {A}\) and \(\mathbf {B}\) are uniquely determined by (14) and (15), the approximate solutions \(\bar{u}\) and \(\bar{v}\) can be obtained. Since the inner product in H is defined by \(<f,g>\ =\int _0^1f(x)g(x)dx\) and \(Y=span(P_n)\), then a \(L_2\)-error can be presented as
and
where \(\varvec{\Phi }=[\phi _0,\phi _1,\ldots ,\phi _n]^T\), \(\varvec{\Psi }=[u,\phi _0,\phi _1,\ldots ,\phi _n]^T\) and \(\varvec{\Omega }=[v,\phi _0,\phi _1,\ldots ,\phi _n]^T\).
Next we will prove the convergence of the proposed method. Define \(\omega (y,\delta )=\sup |y(x_1)-y(x_2)|\), where \(x_1,x_2\in [a,b]\ and\ |x_1-x_2|\le \delta \). Assume that y(x) is bounded on interval [a, b], then \(\Vert y-\sum \nolimits _{k=0}^ny\left( \frac{k}{n}\right) \phi _k\Vert _{\infty }\le \frac{3}{2}\omega (y,\sqrt{\frac{1}{n}})\) [23]. These lead to the following theorem.
Theorem 1
If u(x) and v(x) are bounded on interval [0, 1] and \(Y=span\{P_n\}\), then
and
where \(\mathbf {A}\varvec{\Phi }\) and \(\mathbf {B}\varvec{\Phi }\) are the best approximations to u and v respectively in Y.
Proof
Since \(\mathbf {A}\varvec{\Phi }\) and \(\mathbf {B}\varvec{\Phi }\) are the best approximations to u and v respectively in Y, then
\(\square \)
If u(x) and u(x) are continuous on [0, 1], then we can get
which shows that \(\mathbf {A}\varvec{\Phi }\) and \(\mathbf {B}\varvec{\Phi }\) are convergent to u and v respectively when \(n\rightarrow \infty \). An error estimate is given in the following theorem.
Theorem 2
Suppose u(x) and v(x) are the true solutions to (1). Let \(Y=span(P_n)\) and \(u_n\) and \(v_n\) be the best approximations to u and v in Y respectively. If \(u,v\in C^{n+1}[0,1]\), then a \(L_2\)-error estimate is given by
where \(M_1=\max _{x\in [0,1]}|u^{(n+1)}(x)|\) and \(M_2=\max _{x\in [0,1]}|v^{(n+1)}(x)|\).
Proof
According to Taylor’s formula
where \(R_n(x)=\frac{u^{(n+1)}(\eta )}{(n+1)!}x^{n+1}\), \(\eta \in (0,1)\). Also, consider the following polynomial
Therefore,
where \(M_1=\max _{x\in [0,1]}|u^{(n+1)}(x)|\). (19) can be proved by the similar process. \(\square \)
4 Applications of our method
In this section, two BVPs are solved to illustrate effectiveness of our method. As discussed in Section 2, we take \(\mathbf {X}_n=\{1,x,x^2,\ldots ,x^n\}\). All the computations are performed by \(Mathematica\ 8.0\). Moreover, if the exact solution does not exist, we compute the maximal error remainder parameters as the error analysis. The maximal error remainder parameters are
and
Example 1
Consider the following coupled Lane–Emden equations [3]
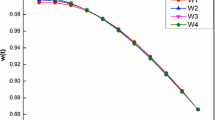
Such problem arises in catalytic diffusion reactions [11]. The parameters \(\beta _1\), \(\beta _2\), \(k_{11}\), \(k_{12}\), \(k_{21}\) and \(k_{22}\) can be specified for the actual chemical reactions. We take \(\beta _1=1\), \(\beta _2=2\), \(k_{11}=1\), \(k_{12}=2/5\), \(k_{21}=1/2\) and \(k_{22}=1\). There is no exact solution for such problem. So we compute the approximate solution by the proposed method. The comparisons on the maximal error remainder parameters between our method and modified ADM [3] are shown in Tables 1 and 2. It can be observed that our method performs better. Since the exact solution can not be found for this problem, the 12th order approximate solution results in an accuracy of order \(O(10^{-11})\) by the proposed method which can be used in place of analytical solution. The theoretical error estimates (18) for the considered problems are shown in Tables 1 and 2 to visualize the convergence. The approximate solutions obtained by our method are listed in Tables 3 and 4 for various n. The logarithmic plots of \(MER_n^{(1)}\) and \(MER_n^{(2)}\) for \(n=2\) through \(n=11\) are displayed in Fig. 1. The dots in Fig. 1 are almost on straight line, which demonstrates an approximate exponential rate of convergence. The approximate solutions are plotted in Fig. 2 with \(n=2,3,4\).

Logarithmic plots of the maximal error remainder parameters for \(n=2\)–11

Plots of the approximate solutions with \(n=2,3,4\). a The curves of \(u_n(x)\) for \(n=2\) (dot line), \(n=3\) (dash line), \(n=4\) (solid line). b The curves of \(v_n(x)\) for \(n=2\) (dot line), \(n=3\) (dash line), \(n=4\) (solid line)
Example 2
Consider the following system of two coupled nonlinear differential equations which is subject to a set of Dirichlet boundary conditions and a mixed set of Neumann and Dirichlet boundary conditions [12]
Such equations describe the kinetics of the reaction between \(\hbox {CO}_2\) and phenyl glycidyl ether (PGE) in solution. The functions u(x) and v(x) are the concentrations of \(\hbox {CO}_2\) and PEG, respectively. x is the dimensionless distance as measured from the center and k is the dimensionless concentration of \(\hbox {CO}_2\) at the surface of the catalyst. Next, we introduce the method for solving such problem. As we have discussed in Sect. 2, if the base functions are
then we can approximate the solution by the product form
where \(\mathbf {C}_{n}=[c_{0},c_{1},c_{2},\ldots ,c_{n}]^{T}\), \(\mathbf {D}_{n}=[d_{0},d_{1},d_{2},\ldots ,d_{n}]^{T}\) and \(\mathbf {X}_n=[\varphi _0(x),\varphi _1(x),\varphi _2(x),\ldots ,\varphi _n(x)]\). \(a_{k}\)’s and \(b_{k}\)’s are coefficients to be determined. The derivatives are given by
where \(\mathbf {P}\) is an operational matrix as we have discussed in Sect. 2. Substituting (26) and (27) into (23), we have
Similarly let \(\mathbf {Q}=[\psi _0(x),\psi _1(x),\psi _2(x),\ldots ,\psi _n(x)]\) be a linearly independent set of functions in H. The working space and inner product are defined in Sect. 2. By taking the inner product of (28) and (29) with elements of \(\mathbf {Q}\) respectively, matrices \(\widetilde{\mathbf {S}}_{2(n+1)\times 1}\) and \(\widetilde{\mathbf {T}}_{2(n+1)\times 1}\) can be obtained, which satisfy
Note that
where \(1\le q\le n+1\),
where \(n+2\le q\le 2n+2\),
and
where \(1\le q\le 2n+2\).
Considering the boundary conditions in (23),
These 4 equations modify 4 number of entries of \(\widetilde{\mathbf {S}}_{2(n+1)\times 1}\) and the corresponding parts of \(\widetilde{\mathbf {T}}_{2(n+1)\times 1}\). If we can solve nonlinear algebraic equations \(\widetilde{\mathbf {S}}=\widetilde{\mathbf {T}}\) properly, then we can obtain the coefficients \(\mathbf {C}_{n}=[c_{0},c_{1},c_{2},\ldots ,c_{n}]^{T}\) and \(\mathbf {D}_{n}=[d_{0},d_{1},d_{2},\ldots ,d_{n}]^{T}\). Then the approximate solution of (23) can be obtained. It is reminded that the system of nonlinear algebraic equations can be solved numerically such as by Newton iteration method [24] or by any contemporary symbolic solver such as MATLAB and Mathematica. Since all the computations are performed by Mathematica, we can use ‘FindRoot’ or ‘NSolve’ command to solve such equations. Take \(\alpha _1=1\), \(\alpha _2=2\), \(\beta _1=1\), \(\beta _2=3\) and \(k=1/2\). The comparisons on the maximal error remainder parameters are shown in Tables 5 and 6. It can be observed that our method performs better. As we have discussed in Example 1, the theoretical error estimates (18) are listed in Tables 5 and 6. The proposed method converges rapidly to the exact solution. The approximate solutions obtained by the proposed method are displayed in Tables 7 and 8.
5 Conclusions
In this paper, we have provided a numerical method for solving coupled Lane–Emden boundary value problems in catalytic diffusion reactions and proved the convergence of the proposed method. Also, we give an error estimate. Finally, two BVPs are solved to demonstrate the high accuracy of our method. It is worthy to note that our method can be applied to solve other linear or nonlinear BVPs.
6 Remarks
To show the efficiency of the present method, the BVPs in Example 1 and Example 2 are solved by a of selection of base functions such as Bessel polynomials [25], non-polynomial functions \(\mathbf {X}_n=\{e^{\eta x},e^{\eta x}x,\ldots ,e^{\eta x}x^n\}\) [26], trigonometric functions \(\mathbf {X}_n=\{1,\cos (x),\sin (x),\ldots ,\cos (\frac{n}{2}),\sin (\frac{n}{2})\}\) and our base functions. As we have discussed in Sect. 4, the 12th approximate solution is adequate for the practical purposes. The numerical results are shown in Tables 9, 10, 11 and 12. It can be obtained that non-polynomial functions converges to true solution faster. Certainly some other functions can be used as base function such as Chebyshev polynomials, Legendre polynomials and Bernstein polynomials [27, 28]. In our future work, more fast convergence basis will be considered and applied to solve many other BVPs.
References
H.J. Lane, On the theoretical temperature of the Sun, under the hypothesis of a gaseous mass maintaining its volume by its internal heat, and depending on the laws of gases as known to terrestrial experiment. Am. J. Sci. 148, 57–74 (1870)
R. Emden, Gaskugeln, Anwendungen der mechanischen Wa rmetheorie auf kosmologische und meteorologische Probleme (BG Teubner, Leipzig, 1907)
R. Rach, J.S. Duan, A.M. Wazwaz, Solving coupled Lane–Emden boundary value problems in catalytic diffusion reactions by the Adomian decomposition method. J. Math. Chem. 52(2014), 255–267 (2014)
Y.P. Sun, S.B. Liu, S. Keith, Approximate solution for the nonlinear model of diffusion and reaction in porous catalysts by the decomposition method. Chem. Eng. J. 102, 1–10 (2004)
A.M. Wazwaz, A new algorithm for solving differential equations of Lane–Emden type. Appl. Math. Comput. 118, 287–310 (2001)
A.M. Wazwaz, A new method for solving singular initial value problems in the second order ordinary differential equations. Appl. Math. Comput. 128, 45–57 (2002)
A.M. Wazwaz, Adomian decomposition method for a reliable treatment of the Emden–Fowler equation. Appl. Math. Comput. 161, 543–560 (2005)
A.M. Wazwaz, R. Rach, Comparison of the Adomian decomposition method and the variational iteration method for solving the Lane–Emden equations of the first and second kinds. Kybernetes 40, 1305–1318 (2011)
N. Das, R. Singh, A.M. Wazwaz, J. Kumar, An algorithm based on the variational iteration technique for the Bratu-type and the Lane–Emden problems. J. Math. Chem. 39, 1–25 (2016)
R. Singh, A.M. Wazwaz, An efficient approach for solving second-order nonlinear differential equation with Neumann boundary conditions. J. Math. Chem. 53, 767–790 (2015)
D. Flockerzi, K. Sundmacher, On coupled Lane–Emden equations arising in dusty fluid models. J. Phys. Conf. Ser. 268, 012006 (2011)
J.S. Duan, R. Rach, A.M. Wazwaz, Steady-state concentrations of carbon dioxide absorbed into phenyl glycidyl ether solutions by the Adomian decomposition method. J. Math. Chem. 53, 1054–1067 (2015)
F.Z. Geng, M.G. Cui, Homotopy perturbation-reproducing kernel method for nonlinear systems of second order boundary value problems. J. Comput. Appl. Math. 235, 2405–2411 (2011)
J.F. Lu, Variational iteration method for solving a nonlinear system of second-order boundary value problems. Comput. Math. Appl. 54, 1133–1138 (2011)
A. Saadatmandia, M. Dehghan, A. Eftekharia, Application of Hes homotopy perturbation method for nonlinear system of second-order boundary value problems. Nonlinear Anal. Real. 10, 1912–1922 (2009)
M. Dehghan, A. Saadatmandi, The numerical solution of a nonlinear system of second-order boundary value problems using the sinc-collocation method. Math. Comput. Model. 46, 1434–1441 (2007)
M. Dehghan, M. Lakestani, Numerical solution of nonlinear system of second-order boundary value problems using cubic B-spline scaling functions. Int. J. Comput. Math. 85, 1455–1461 (2008)
N. Caglar, H. Caglar, B-spline method for solving linear system of second-order boundary value problems. Comput. Math. Appl. 57, 757–762 (2009)
M. Turkyilmazoglu, Effective computation of exact and analytic approximate solutions to singular nonlinear equations of Lane–Emden–Fowler type. Appl. Math. Model. 37, 7539–7548 (2013)
M. Turkyilmazoglu, An effective approach for numerical solutions of high-order Fredholm integro-differential equations. Appl. Math. Comput. 227, 384–398 (2014)
M. Turkyilmazoglu, Solution of initial and boundary value problems by an effective accurate method. Int. J. Comput. Methods 14(1750069), 1–16 (2017)
T.C. Hao, F.Z. Cong, An efficient method for solving a class of nonlocal boundary value problems and error estimate. Appl. Math. Lett. 72, 42–49 (2017)
T.J. Rivlin, An Introduction to the Approximation of Functions (Dover, New York, 1981)
J.M. Ortega, W.G. Rheinboldt, Iterative Solution of Nonlinear Equations in Several variables (Academic Press, New York, 1970)
Ş. Yuzbaşı, N. Şahin, M. Sezer, Bessel polynomial solutions of high-order linear Volterra integro-differential equations. Comput. Math. Appl. 62, 1940–1956 (2011)
L. Yuan, C.W. Shu, Discontinuous Galerkin method based on non-polynomial approximation spaces. J. Comput. Phys. 218, 295–323 (2006)
M. Idrees Bhattia, P. Brackenb, Solutions of differential equations in a Bernstein polynomial basis. J. Comput. Appl. Math. 205, 272–280 (2007)
S.A. Yousefi, M. Behroozifar, M. Dehghan, Numerical solution of the nonlinear age-structured population models by using the operational matrices of Bernstein polynomials. Appl. Math. Model. 36, 945–963 (2012)
Acknowledgements
The authors would like to thank the referees for their many constructive comments and suggestions which helped to improve this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hao, TC., Cong, FZ. & Shang, YF. An efficient method for solving coupled Lane–Emden boundary value problems in catalytic diffusion reactions and error estimate. J Math Chem 56, 2691–2706 (2018). https://doi.org/10.1007/s10910-018-0912-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10910-018-0912-7
Keywords
- Approximate solutions
- Coupled Lane–Emden equations
- BVPs
- Series representation
- Error estimate
- Base functions