
Abstract
This study presents a true root-mean-square (RMS) power detector with a wide dynamic range in a 180-nm BiCMOS process. An RMS power detector based on a current feedback loop composed of two current-squaring cells and a transconductance amplifier is proposed and analysed. By placing the layout of two current-squaring cells symmetrically and setting the appropriate loop gain, the impact of the process mismatch on the dynamic range can be reduced, thus achieving a wide dynamic range of 34 dB from − 18 to 16 dBm at a 5 V supply voltage. A two-stage detector consisting of two identical RMS detectors and a preamplifier is also presented. The two-stage RMS detector demonstrates a dynamic range of 60 dB from − 44 to 16 dBm at 1.5 GHz with a ± 1.5 dB log error, making it suitable for both receiver and transmitter signal power detection.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Power detectors (PDs) are crucial components of radio frequency (RF) wireless transceivers. In the transmitter, PDs detect the output power of the power amplifier and help achieve automatic power control [1]. In the receiver, PDs are used to realise signal intensity indication and automatic gain control [2]. Owing to the large difference between the powers of the detected transmitted and received signals, the PD requires a considerable dynamic range to meet the requirements of transceivers. In modern wireless communication systems, high-peak-to-average ratio (PAPR) modulation schemes are widely used to improve spectral efficiency and increase data throughput. Among the various types of PDs, RMS PDs average the signal over time regardless of the signal’s shape. Therefore, RMS PDs are suitable for the measurement of high-PAPR signals. However, they suffer from limited dynamic range [2,3,4,5,6].
Various structures have been proposed to increase the dynamic range of the RMS PDs. In [2], the common source pairs and multi-DAC-based offset compensation was used to expand the dynamic range to 28 dB, with a maximum detection power of − 2 dBm. In [3], a balanced Wheatstone full-bridge structure with positive and negative thermistors was proposed, and a dynamic range of 23 dB was achieved. However, its minimum detection power, which is only 0dBm, was easily disturbed by thermal noise from the bulk. The work reported in [4] achieved a 34 dB dynamic range using diodes working at both positive and negative cycles. Nevertheless, the minimum detection power depended on the bias voltage of the diodes and was easily affected by process and power mismatch. Similarly, the PD in [1] with cascading gain amplifiers and squaring circuits also deviated from the ideal curve at lower end of the dynamic range owing to the mismatch.
As the dynamic range of a single RMS PD is limited, it is necessary to conduct research on multistage RMS PDs. A PD composed of a capacitor attenuation array and unbalanced source-coupled rectifiers was proposed in [5] to achieve a dynamic range of 45 dB, whereas its minimum detection power of − 10 dBm limits its application in the receiver. Another PD, including four gain amplifiers and four squaring circuits, was reported in [1], realising a dynamic range of over 40 dB with the help of a modem. Another method to achieve a wide dynamic range is to use two parallel PDs with a modified output stage [6]. Despite its dynamic range of 47 dB, it suffered from a maximum detection power of no more than − 6 dBm, which limits the detection capabilities for high-power signals.
In this paper, an RMS current feedback power detector (CFPD) is proposed, which realises true RMS operation and provides a dynamic range of over 30 dB. By placing the layout of the two current-squaring cells symmetrically and setting the appropriate loop gain, the linearity of the PD at the lower end can be improved. Additionally, the dynamic range is extended by cascading two CFPDs and a preamplifier to over 60 dB from − 44 to 16 dBm at 1.5 GHz with a ± 1.5 dB log error, making it suitable for both receiver and transmitter signal power detection. Compared with previous works, the proposed two-stage RMS PD not only has a larger dynamic range but also simplifies the circuit design.
The remainder of this paper is organized as follows. The principle of the proposed RMS CFPD is analysed in detail in Sect. 2. Section 3 presents a two-stage RMS power detector based on the proposed CFPD. Additionally, the effect of the bias current \(I_{0}\) on the loop gain and dynamic range is demonstrated. In Sect. 4, simulation and measurement results are presented and discussed. Finally, the conclusions are presented in Sect. 5.
2 RMS current feedback power detector analysis
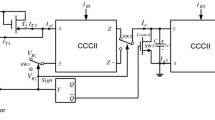
This section elaborates on the operating principles of the proposed RMS CFPD. As shown in Fig. 1, the RMS CFPD is composed of an RF current-squaring cell (RF CSC), RMS current-squaring cell (RMS CSC), transconductance amplifier (TCA) and output buffer, turning the RF input wave into the RMS output voltage.

Block diagram of proposed CFPD
2.1 Current squaring cell
The current-squaring cell (CSC) is the core component of the entire CFPD. The schematic of the RF CSC is shown in Fig. 2. The sizes of the transistors and the other components of the RF CSC are listed in Table 1.

Schematic of the RF CSC (a) no signal input (b) RF signal input
It squares the input signal and filters it. Compared with the RF CSC, the RMS CSC has no filter capacitor C1 and operates in the DC state. The input impedance of the RF CSC is.
where \(gm_{Q2}\) and \(gm_{Q4}\) are the transconductances of the transistors \(Q_{2}\) and \(Q_{4}\), respectively. \(I_{0}\) is the bias current of \(Q_{2} \sim Q_{4}\) and \(V_{T}\) is the thermal voltage of the transistors. When the bias current \(I_{0}\) is the PTAT current, the input impedance does not change with the temperature. The RF CSC acts as an impedance terminal and converts the voltage to current as:
When there is no signal input, the base bias voltage of \(Q_{4}\), which is connected as a diode, is \(V_{0}\), and the base bias voltages of \(Q_{1}\) and \(Q_{2}\) are \(V_{bias}\). Ignoring the voltage drop on the resistors \(R_{e}\) and \(R_{base}\), the following formulae can be obtained from the voltage-current relationship of the transistor:
When there is an RF signal input, the base voltage of \(Q_{4}\) becomes \(V_{x}\), and the current flowing through the transistor \(Q_{4}\) becomes \(I^{\prime }\). The current flowing through \(Q_{2}\) becomes \(I^{\prime \prime }\). The following formulae can then be obtained:
From (3), (4), (5), (6) to (7), the output current \(I_{OUT}\), current gain \(A_{I}\) and squaring current \(I_{SQR}\) can be solved as follows:
Expand (10) into Taylor series as:
Equation (11) shows that when \(\left| {I_{rf} } \right| < < 4 * I_{0}\), CSC squares the input current; when \(\left| {I_{rf} } \right| > > 2 * I_{0}\), the absolute value of the input current is taken as:
Properly increasing the \(R_{a}\) can reduce the input current, thereby increasing the maximum power that the power detector can detect. In the implementation, we chose \(R_{a}\) as 500 \(\Omega\). Transistor \(Q_{5}\), resistors \(R_{1}\), and \(R_{2}\) form an active load circuit, and its AC impedance is
As shown in (13), as the input power increases, \(R_{load}\) decreases to prevent \(V_{OUT}\) from falling too much to saturate the transistors \(Q_{1} \sim Q_{4}\) and cause the latter TCA to deviate from the operating point. Capacitor \(C_{1}\) performs the role of signal filtering and shorts high-frequency components to the AC ground. Therefore, only the RF CSC of the entire current feedback loop works in the RF band, which greatly reduces the bandwidth requirements of the TCA and output buffer. The RMS CSC is completely symmetrical with the RF CSC and works in the DC state; therefore, the filter capacitor can be removed.
2.2 RMS power detector based on current feedback loop
As shown in Fig. 1, the entire CFPD includes a TCA and an output buffer in addition to the CSCs, as shown in Fig. 3.

TCA and an output buffer
Transistor \(Q_{12}\) replicates the feedback current and generates an RMS voltage on the resistor \(R_{13}\), which is buffered after passing through the output buffer. The function of \(Q_{16}\) is to compensate for the input voltage drop of the RMS CSC so that the collector voltages of \(Q_{11}\) and \(Q_{12}\) are the same to achieve current matching. When the loop is established, the TCA has the same voltage at both input terminals, as follows:
where \(I_{back}\) denotes the feedback current injected into the RMS CSC. The above formula can be simplified as:
set \(R_{13}\) the same as \(R_{in}\), \(V_{rms}\) can be derived as
Equation (16) indicates that the output voltage of the proposed CFPD is the true RMS value of the input RF signal. As described in [1], the process mismatch on CSCs causes the lower end of the conversion characteristic to deviate from the ideal curve. Therefore, the dynamic range was limited. In our proposed CFPD, the mismatch on both sides of Eq. (14) can be offset by placing the layout of the two CSCs totally symmetrically; thus, the dynamic range can be expanded.
3 Expanded dynamic structure based on CFPD
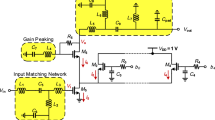
A segmented power detection method was used to expand the dynamic range. The proposed two-stage power detector in Fig. 4(a) consists of two CFPDs and a preamplifier, that adopts the Meyer structure [7], as shown in Fig. 4(b).

Wide dynamic structure based on CFPDs: (a) proposed two-stage power detector (b) preamplifier using the Meyer structure
The reason for using the Meyer amplifier is that it can achieve a wide matching bandwidth. Its input impedance \(R_{in\_amp}\) was designed to be 50 \(\Omega\) by current and voltage feedback. A detailed derivation process can be found in [7]. The input impedance of the entire power detector is
Therefore, the entire two-stage power detector can achieve broadband impedance matching without an additional matching network.
As shown in Fig. 4(a), for an RF input signal, two channels generate a DC output signal, namely, \(V_{OUTA}\) and \(V_{OUTB}\). Unlike the method in [1], which requires a modem to determine which output should be used to estimate the signal power, the proposed scheme is very simple. When the signal power indicated by the high-power path is higher than its sensitivity, \(V_{OUTA}\) is used to indicate the signal power; otherwise, \(V_{OUTB}\) is used. This benefits from the wide dynamic range of the proposed CFPD. Otherwise, more gain stages are required, and each stage will have a corresponding DC output, which requires more complex discrimination methods.
To expand the dynamic range as much as possible, the two CFPDs must have the same transfer characteristics, which can be affected by the loop gain of the CFPD. The loop gain of the entire current feedback loop is
where \(G_{m}\) and \(V_{diff}\) are the transconductance and input voltage of the TCA, respectively. It can be seen from (11) that increasing \(I_{0}\) also increases the maximum input power that is allowed by the square-law relationship. However, as (18) indicates, increase in \(I_{0}\) also reduces the loop gain of the current feedback loop. Therefore, the feedback current cannot follow the input current exactly owing to the finite gain of TCA. This phenomenon is especially obvious when the input power is small. As shown in (18), the loop gain is proportional to \(V_{diff}\). When a low-power signal is input, the initial \(V_{diff}\) is small, so the loop gain is much smaller than when a large signal is input.
In addition, the mismatch of the TCA with the finite gain affects the lower end of the dynamic range as the loop gain is small. This makes the transfer characteristics of the two CFPDs inconsistent, and the dynamic range is greatly restricted. Therefore, the size of the \(I_{0}\) needs to be carefully selected, and a trade-off is made between the maximum detectable input power and the loop gain.
4 Measured results and discussion
The proposed RMS PD was designed and implemented using a 0.18 µm SiGe BiCMOS process. Figure 5 shows a photograph of the fabricated chip with an area of 2.15 mm × 2.59 mm, including four current feedback power detectors, six preamplifiers, and pads.

Fabricated chip in 0.18 µm SiGe BiCMOS
PD1, PD2, and PreAmp1 form a two-stage power detector, and the other components are used for auxiliary testing and can be removed to save area in actual applications. A single CFPD occupies an area of 0.43 \({\text{mm}}^{2}\) and consumes 3.39 mW at a 5 V supply voltage. The measurement setup is shown in Fig. 6. An Agilent E4422B signal generator was used as the input RF signal source, and the output DC voltage was measured using a Keysight 34401A multimeter.

Measurement setup of the proposed RMS power detector
The RMS power detection function was verified. Figure 7 shows the transfer characteristics and errors of a single CFPD, both measured and simulated at 1.5 GHz under a 5 V power supply.

The transfer characteristics and measurement error of a single CFPD measured at 1.5 GHz under a 5 V power supply
The logarithmic-linear relationship between the output DC voltage and RF input power indicates the RMS operation of the proposed CFPD. The simulation result shows a dynamic range from − 32.5 to 15 dBm with a ± 1.5 dB error. The measurement result deviates from the simulated result at the lower end of the curve and achieves a dynamic range from − 18 to 16 dBm. As shown in [1] and formula (18), this is mainly caused by the process mismatch and limited loop gain in the cases of low-power signals, so that the feedback current cannot exactly follow the input current.
Figure 8 illustrates the mismatch error between the four CFPDs at 1.5 GHz when \(I_{0}\) is 150 and 45 µA. When \(I_{0}\) is 150 µA, the maximum mismatch error between the four channels is larger than when \(I_{0}\) is 45 µA. The mismatch is even worse when a low-power signal is input, as the loop gain becomes smaller under this condition, which is consistent with the theory in Sect. 3.

four CFPDs measured at 1.5 GHz (a) transfer characteristics when \(I_{0}\)=150 µA (b) measurement error when \(I_{0}\)=150 µA (c) transfer characteristics when \(I_{0}\)=45 µA (d) measurement error when \(I_{0}\)=45 µA
The new two-stage segmented RMS detector was simulated and measured with 1.5 GHz signals as shown in Fig. 9.

Measurement of the proposed two-stage RMS power detector at 1.5 GHz (a) transfer characteristics (b) measurement error
The simulation results show that it achieves a dynamic range from − 60 to 15 dBm with ± 1.5 dB log error. The horizontal distance between \(V_{OUTA}\) and \(V_{OUTB}\) is the gain of the preamplifier, which is 25 dB. The slope of the \(V_{OUTA}\) and \(V_{OUTB}\) is equal because a small \(I_{0}\) is used to improve the loop gain and relieve the mismatch. The measured transfer curves of \(V_{OUTA}\) and \(V_{OUTB}\) overlap approximately − 18 dBm; therefore, the entire dynamic range is continuous from − 44 to 16 dBm. The reduction in the measured dynamic range is also caused by the process mismatch and limited loop gain when the input power is small. Nevertheless, by setting a reasonable loop gain, the proposed two-stage RMS power detector still has a dynamic range of 60 dB wider than that in previous works, making it suitable for both receiver and transmitter signal power detection. Table 2 summarises the results of the performance comparisons.
5 Conclusions
To increase the dynamic range of RMS PDs, this paper proposes a novel RMS PD based on a current feedback loop, which realises true RMS operation. The RMS CFPD is composed of an RF current-squaring cell, an RMS current-squaring cell, a transconductance amplifier, and an output buffer, turning the RF input wave into the RMS output voltage. By placing the layout of two current-squaring cells symmetrically and setting the appropriate loop gain, the linearity of the PD at the lower end can be improved, thus increasing the dynamic range. To extend the dynamic range further, a segmented power detection structure composed of two proposed CFPDs and a Meyer preamplifier was designed and implemented. Compared with previous works, the proposed two-stage RMS PD not only has a larger dynamic range but also simplifies the circuit design. Measurements show that this new two-stage RMS PD can work with signals up to 1.5 GHz and maintain the measurement error below ± 1.5 dB over a 60 dB dynamic range.
References
Choi, J., Lee, J., Xi, Y., Myoung, S. S., Baek, S., Kwon, D. H., Bui, Q. D., Lee, J., Oh, D., & Cho, T. B. (2016). Wide dynamic-range CMOS RMS power detector. IEEE Transactions on Microwave Theory and Techniques, 64(3), 868–880. https://doi.org/10.1109/TMTT.2016.2519030
Sejc, I., Popuri, S., & Sturm, J. (2018). Design of DAC based RMS power detector for RF applications. In 2018 Austrochip Workshop on Microelectronics (Austrochip) (pp. 32–37). IEEE. https://doi.org/10.1109/Austrochip.2018.8520707.
Li, J. H., & Liao, X. (2021). A novel RF power detector based on positive and negative thermistors using standard CMOS technology. IEEE Electron Device Letters. https://doi.org/10.1109/LED.2021.3121285
Li, C., Yi, X., Boon, C. C., & Yang, K. (2019). A 34-dB dynamic range 0.7-mW compact switched-capacitor power detector in 65-nm CMOS. IEEE Transactions on Power Electronics, 34(10), 9365–9368. https://doi.org/10.1109/TPEL.2019.2908283
Hao, X., Zheng, Y., Tian, F., Zhou, Q., Li, H., Liu, Z., Liu, J., & Liao, H. (2019). A reverse-RSSI logarithmic power detector with+ 35-dBm maximum detectable power in 180-nm CMOS. IEEE Microwave and Wireless Components Letters, 29(9), 610–613. https://doi.org/10.1109/LMWC.2019.2933184
Gong, Y., Lee, S., Ying, H., Omprakash, A. P., Gebara, E., Gu, H., Nicholls, C., & Cressler, J. D. (2019). A broadband logarithmic power detector using 130 nm SiGe BiCMOS technology. In 2019 IEEE BiCMOS and Compound semiconductor Integrated Circuits and Technology Symposium (BCICTS) (pp. 1–4). IEEE. https://doi.org/10.1109/BCICTS45179.2019.8972724.
Wu, T. H., Syu, J. S., & Meng, C. C. (2009). Analysis and design of the 0.13-um CMOS shunt-series series–shunt dual-feedback amplifier. IEEE Transactions on Circuits and Systems I: Regular Papers, 56(11), 2373–2383. https://doi.org/10.1109/TCSI.2009.2015603
Wang, J., Zheng, Y., Yang, F., Tian, F., & Liao, H. (2015). A wide band CMOS radio frequency RMS power detector with 42-dB dynamic range. In 2015 IEEE International Symposium on Circuits and Systems (ISCAS) (pp. 1678–1681). IEEE. https://doi.org/10.1109/ISCAS.2015.7168974.
Varga, G., Wolf, B., van Rey, T., Ashok, A., & Heinen, S. (2016). Design of an integrated CMOS highly sensitive true RMS RF power detector for cognitive radio applications. In 2016 12th Conference on Ph. D. Research in Microelectronics and Electronics (PRIME) (pp. 1–4). IEEE. https://doi.org/10.1109/PRIME.2016.7519534.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, H., Cai, Q., Yang, Z. et al. A 60-dB dynamic range two-stage RMS power detector. Analog Integr Circ Sig Process 111, 461–467 (2022). https://doi.org/10.1007/s10470-022-02020-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10470-022-02020-3