
Abstract
An active polyphase filter capable of high frequency quadrature signal generation has been analyzed. The resistors of the classical passive polyphase filter have been replaced by transconductors, CMOS inverters (F. Tillman and H. Sjöland, Proceedings of the Norchip Conference (pp. 12–15), Nov. 2005; Analog Integrated Circuits and Signal Processing, 50(1) 7–12, 2007). A three-stage 0.13 μm CMOS active polyphase filter has been designed. Simulations with a differential input signal show a quadrature error less than 1° for the full stable input voltage range for frequencies from 6 GHz to 14 GHz. Phase errors in the differential input signal are suppressed at least three times at the output. Corner simulations at 10 GHz show a maximum phase error of 3° with both n- and pMOS slow, in all other cases the error is less than 0.75°. The three-stage filter consumes 34 mA from a 1.2 V supply. To investigate the robustness of the filter to changes in inverter delay, an inverter model was implemented in Verilog-A. Linear c in and g in were used, whereas g m , c out , and g out were non-linear. It was found that the filter could tolerate substantial delays. Up to 40° phase shift resulted in less than 1.5° quadrature phase error at the output.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Popular architectures for integrated radio transceivers, like direct conversion and low-IF, require quadrature local oscillator signals. As the carrier frequency increases in the quest for more bandwidth, generating accurate quadrature signals becomes a major challenge. There are a number of ways to generate high frequency quadrature signals, some are: (i) Quadrature oscillator, (ii) Frequency division of a differential oscillator running at twice the frequency. After the frequency division quadratures phases can be obtained, (iii) Differential oscillator followed by a passive polyphase filter, and (iv) Differential local oscillator + active polyphase filter [1, 2].
To build quadrature LC oscillators at high frequencies is possible but more difficult than at lower frequencies, since the coupling of the oscillators adds capacitance to the oscillating nodes and thus reduces the tuning range. Despite this some high frequency LC quadrature voltage controlled oscillators can be found in [3–6]. In ring oscillators the quadrature phases can be obtained more or less for free, but the phase noise is much higher than in the CMOS LC counterparts [7–9]. Using other processes like SiGe the obtainable phase noise will be of the same level as for CMOS LC oscillators [10]. To divide the frequency of an oscillator running at twice the frequency is also possible, but might be difficult with low phase noise at high frequencies. Using a passive polyphase filter and a differential local oscillator is a well proven way of generating quadrature signals. At high frequencies, however, losses become problematic. At frequencies of tens of GHz the component values must be made small, resulting in poor matching and low input impedance. An active polyphase filter has the same demands on low resistance values. These can, however, be implemented by increasing the transconductance, g m , of the active part in the filter, see Fig. 17. The active elements eliminate the problem of signal attenuation, and also increase the input impedance.
Also after downconversion, at Intermediate Frequency (IF), quadrature signals are often used, and active or passive polyphase filters can be used to suppress signals at the image frequency [1, 2, 11–14].
In this paper the capability of using an active polyphase filter based on CMOS inverters for high frequency quadrature generation is investigated. Compared to a passive polyphase filter an active one is more complicated, as it contains non-linear devices in the signal path, and although the architecture is known [2] more investigations in this area are needed. The investigated three stage active polyphase shows a ±40% bandwidth from 6 GHz to 14 GHz with less than 1 degree quadrature error.
The rest of this paper is organized as follows: in Sect. 2 the passive polyphase filter is shortly recaptured. In Sect. 3 the transconductor is examined and a transconductor model is derived and verified against transistor level simulations. Parameters of the model are stretched and the effects on the active polyphase filter are observed. Section 4 shows simulated results of the active polyphase filter in a 130-nm 1p8M CMOS process. Section 5 investigates the stability of the active polyphase filter through PVT simulations.
2 Passive polyphase filter
We start with a short summary of the passive polyphase filter, Fig. 1. It is well known [2, 15, 16] that the voltage gain of this filter is \(\sqrt{2}\) for an unloaded stage and \(1/\sqrt{2}\) for a stage in a cascaded chain of identical stages. Assuming all R and C to be perfectly matched, a differential input signal at V + I and V − I will be converted to a perfect quadrature output signal, if the frequency is exactly equal to 1/2πRC. If quadrature signals must be generated over a wide frequency range, or if process variations are significant, several stages can be cascaded, tuned to different frequencies. Good matching of the components in each stage is essential, as it limits the achievable quadrature accuracy.

A passive RC polyphase filter
The Image Rejection Ratio (IRR) of a quadrature receiver depends on the quadrature accuracy, and can be written as:
where ε denotes the relative amplitude error and θ the quadrature error in radians between the I and Q phases.
In a receiver architecture relying on quadrature downconversion, the achievable image rejection ratio is typically in the range of 30–40 dB [13, 17–19], without calibration schemes. In order to increase the image rejection, very accurate quadrature signals, both phase and amplitude, must be generated. As can be seen in [12] a phase error of ±5° leads to a maximum image rejection of 30 dB, whereas an amplitude error of ±12% is alloved for the same rejection ratio. In practice typically switching mixers are used, and the amplitude error is then less important.
3 Active polyphase filter analysis
In this paper the resistors of the passive polyphase filter are replaced by transconductors. With ideal transconductors g m should be equal to 1/R not to change the frequency of operation. The gain of the active filter can be larger than unity and the load on the preceding stage reduced thanks to the higher input impedance of the transconductor compared to the resistor. Since the active polyphase filter is a feedback structure, with many different feedback paths, the stability is examined in Sect. 3.1.
The transconductor investigated in this paper is designed using a 1p8M 130-nm CMOS process and an extraction frequency of 10 GHz, but the procedure and derived equations are not dependent on the process, only some numerical values calculated.
3.1 Stability of the active polyphase filter
A three-stage active polyphase filter was designed and simulated. It was found that the filter becomes unstable at small input signal amplitudes. The input amplitude should be larger than 200 mV to stop the filter from self oscillating and instead lock to the input signal. At 280 mV input amplitude the full saturated output amplitude of 600 mV was reached.
When instability occurs the filter oscillates in a differential mode. The inverters in the second stage then forms a 4-stage ring oscillator. The same happens in the third stage. Due to the internal structure of the transconductor, see Fig. 2(a), also a ring with an even number of stages can self-oscillate. When the input signal is too small to force the inverters to switch, the positive feedback of the ring will make them saturate at high or low. The internal feedback through R f then slowly changes the gate potentials, through the RC time-constant between the feedback resistor and the capacitance at the gate, until the inverters switch. This causes the whole ring to change state. The periodicity is set by the feedback resistance and the capacitance at the gate. The loop gain at the self oscillation frequency decreases with increasing input amplitude and the filter eventually stops oscillating and instead locks to the input signal.

a Schematic of the transconductor with internal feedback and DC-block capacitance. b Symbol of the transconductor
Not having the internal feedback and DC-block, DC-offsets would be amplified and the filter could saturate at high or low potential. Thus there is a trade-off between voltage gain, feedback resistance, and minimum input amplitude. However, this high frequency polyphase filter is intended to transform a differential oscillator signal into a quadrature one, and generally the amplitude from an oscillator is quite large. Thus instability should not be a problem in this application.
3.2 Transconductor
The transconductor is to be used as a component in the high frequency polyphase filter, therefore the fewer internal nodes the better. The transconductor used is this analysis a CMOS inverter with input DC-block and bias voltage feedback (Fig. 2). The purpose of the DC-block and bias feedback is to set the DC potential at the outputs to V DD /2, so that any DC offset that might occur does not get amplified in the filter chain.
The analysis is not restricted to this implementation of the transconductor, however, since an extracted model is used in all the analysis and such a model can be extracted for any implementation of the transconductor. However, when numerical results are given these are, of course, for this transconductor.
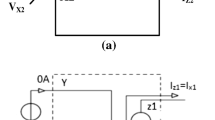
The objective is to extract a model which captures the non-linearities of the transconductor when both input and output amplitude are large, and yet is not more complex than necessary. The approach we took was to start from the transistor behavior. From that it was assumed that the most non-linear elements are the transconductance, g m , and the output admittance, y out , which is modeled as g out in parallel with c out . The other elements in the model are considered linear in the analysis. The transconductor model is shown in Fig. 3 together with the values extracted at 10 GHz (the extraction frequency f 0 = 10 GHz).

Model extracted for the transconductor at f 0 = 10 GHz. a A lumped model. b The corresponding parameters
This model was implemented in a Verilog-A transconductor used to verify the validity of the extraction. The extraction was performed in three steps using transient simulations:
-
1.
The output admittance, amplitude and phase, was simulated versus output voltage amplitude while the input was at its DC bias level. The output conductance and capacitance were fitted to third order polynomials, see Fig. 4.
-
2.
g m was extracted by stimulating the transconductor with a sinusoidal input voltage and loading the output with a small signal short circuit. The transient output current and input voltage were then used to calculate the g m polynomial, see Fig. 5.
-
3.
The small signal c in and g in were extracted from a transient simulation. By observing the magnitude and phase relation of the input voltage and current the complex admittance was calculated and g in and c in extracted.

Output admittance extracted as g out and c out compared to the transistor model

The transconductance fitted to the Verilog-A model and compared to the transistor model
The voltage gain of the transconductor was simulated (Fig. 6). There is a good agreement between the extracted model and transistor up to about 50% of full swing. The error at large amplitudes is due to the extraction procedure, where large signals were not simultaneously applied to input and output. To capture this a more complicated model would be necessary, but for our purposes the level of accuracy achieved is sufficient.

Output voltage magnitude versus input magnitude for both transistor and Verilog-A implementation. Full voltage swing is 600 mV
To give an indication of the level of non-linearity, the three non-linear parameters, normalized with their small signal values, are plotted in Fig. 7. The magnitude of g m is within 20% of its small signal value over the amplitude range, g out and c out are within 20% of their small signal values, up to an amplitude of 510 mV, which corresponds to 85% of the full voltage swing. The phase of g m only changes by a few degrees over the full range (Fig. 5).

Plot of three of the non-linear transconductor parameters as they change with the voltage at input or output of the transconductor
3.3 Voltage gain
To calculate the voltage gain of a stage in the active polyphase filter Fig. 8 was used. By applying Kirchoff’s current law in node a, by inspection one gets (2a). Inserting the expressions for the currents (2b)–(2e) and solving (2a), results in the voltage gain (3). At the designed frequency, where g m = ω0 C, (3) can be simplified to (4). The unloaded voltage gain with ideal transconductor (Z out = ∞) can then be found to be equal to 2, as in [2]

Schematic of a part of the polyphase filter suitable to calculate the voltage gain of a stage
Equation 2e through 4 contain the load impedance, Z L . In a chain of cascaded stages, the load impedance can be calculated as Z in of the transconductor in parallel with the impedance looking into the filter capacitance, C. Making the observation that the voltage is in phaseFootnote 1 at both sides of the capacitance leads to an equivalent impedance of the filter capacitance:
The equivalent impedance of the filter capacitance is determined by the voltage gain of the stage. When the voltage gain is high the capacitance is increased. When the filter is saturated (A V = 1) the capacitance becomes a virtual open circuit. The effect can be expressed as charge efficiency,
which is a measure of the energy it takes to make a transition for the transconductor compared to charging the filter capacitances. The charge efficiency is simulated for a three-stage active polyphase filter in Sect. 3.5. When the polyphase filter is saturated the charge efficiency becomes infinite.
With (5) the load impedance, or rather admittance, can be expressed:
Assuming the stage is loaded by an identical one, the voltage gain (3) can be solved by inserting (7) and solving for A V :
The negative root in (8) is discarded since it yields a negative voltage gain. Imposing small signal and low frequency (SSLF) conditions reduces (8b) to:
From (9) the SSLF voltage gain at the designed centre frequency \(\left(g_m=\omega C\right)\) and with ideal transconductor, that is \(g_{in}=g_{out}=0\) , equals \(\sqrt{2}\). From (4) the unloaded voltage gain, when Z L is infinite, is equal to 2, also that with ideal transconductor. This agrees with the findings in [2].
In Fig. 9(a) the voltage gain (8), is plotted together with the SSLF voltage gain (9), and in Fig. 9(b) the simulated voltage gain is compared to (8) for an input amplitude of 440 mVFootnote 2. In Fig. 9(a) the achievable voltage gain is limited by the SSLF curve and can approach that for an ideal transconductor. For the implemented transconductor the small signal gain is just above 1.2 at the centre frequency. The correspondence between the simulated voltage gain and (8) is excellent from 8 to beyond 14 GHz, see Fig. 9(b).

a Small signal voltage gain of the active polyphase filter (8) and small signal low frequency approximation 9. b Analytic large signal voltage gain (8) (solid), and simulated voltage gain (dashed), V in = 440 mV
3.4 Phase analysis
The output phases from a stage in the filter are analyzed using the schematic in Fig. 10. It is assumed that Z L is equal to Z in , which is valid inside a saturated filter. The output voltages, V A and V B , can then easily be expressed as (10a)–(10b),

Schematic used to calculate the output phase after a filter stage
where X and Z are given by (11a)–(11b) and θ is defined in Fig. 1 as the input quadrature phase error. For quadrature output signals the phase of Q A and Q B should be equal, which happens only if θ = 0.
The phase difference, \({\angle}Q_A-{\angle}Q_B\) , as a function of input quadrature phase error is plotted in Fig. 11(a).

a Sensitivity of the phases of Q A and Q B with respect of the quadrature offset, θ. b Comparison of analytic expression (solid) and simulation (dashed)
To verify the analytic expressions a comparison to simulated phase error was performed for two different input amplitudes, Fig. 11(b). The agreement is very good, justifying the assumption of Z L being equal to Z in made in the derivation.
3.5 Model simulations of the polyphase filter
In this section the three-stage active polyphase filter (Fig. 17) is simulated using the Verilog-A transconductor model from Sect. 3.2. Five aspects are investigated, the first three with quadrature input signal: (i) voltage gain versus transconductor phase delay, (ii) effective capacitance in the filter versus phase delay, (iii) charge efficiency versus frequency with scaled filter capacitance, (iv) quadrature phase error after three stages versus phase delay with differential input signal, and (v) voltage gain after the three stage filter versus phase delay with differential feed.
The voltage gain versus phase delay of the three-stage active polyphase filter is plotted in Fig. 12. At low input amplitudes the filter is unstable for large phase delays. The curves are therefore cut. The extra phase delay is added to the extracted phase of g m in the previous section. The voltage gain reaches a maximum at about 30° phase delay for small input signals, and up to 70° for large signals.

Voltage gain of the three-stage active polyphase filter versus phase delay of the transconductor for six different input amplitudes
The filter capacitances were set to \(C=g_{m0}/\omega_0=486\) fF. The effective capacitance was calculated from the reactive part of the impedance looking into a filter capacitance. The phase delay was swept from 0 to 90 degrees for different input amplitudes. For phase delays above 50 degrees the effective capacitance becomes negative for low input amplitudes and the curves are cut, see Fig. 13. The curves in Figs. 12 and 13 show an interesting resemblance.

Effective filter capacitance of the three-stage active polyphase filter versus phase delay of the transconductor for six different input amplitudes
The effective capacitance increases with phase delay until it reaches a peak, then decreases and becomes negative. The explanation is that with no additional phase delay the current injected by g m to the output load is almost 90° out of phase with respect to the voltage at the other side of the filter capacitance, see Fig. 17. When the current is fed into the mainly capacitive impedance at the output, the output voltage will be almost in phase with the voltage at the other side of the filter capacitance. If the gain is close to unity the signal voltage over the capacitance is then small, and so is the effective capacitance. A low effective capacitance will result in a reduced power consumption and an increased capability of high frequency operation. The effective capacitance is not zero at zero additional delay, however, since there is a phase delay in g m at 10 GHz, and that even at small amplitudes the effect of g out and g in is not negligible, preventing the nodes from being purely capacitive. The effect of g out increases with amplitude, which is the reason why the effective capacitance does not drop until a larger phase delay is applied.
The charge efficiency is defined as the ratio between the input capacitance of the transconductor, c in , and the effective capacitance in the filter, \(C_{eff}=C\left(A_V-1\right)\). The charge efficiency was simulated versus frequency, where the filter capacitance was scaled with frequency, \(C=g_{m0}/\omega\) , and the effective capacitance was extracted. Since the frequency was changed also the phase delay had to be changed accordingly. The delay in the transistor can be expressed as, [20]:
where all time-constants, τ, are ∝1/f t . Staying well below f t , (12) can be reduced to (13):
where \(\tau_1=\frac{4}{15\cdot\omega_t}\). The transit frequencies were simulated for the transistors constituting the transconductor. The f t used in (13) is the 43 GHz f t of the pMOS. Equation 13 then gives a delay of 3.55° compared to the modeled 6.29°. In the simulation \({\angle}g_{m0}\), where g m0 is the small signal component of g m , were given as ω · τ1 instead of the extracted value and the simulations were run up to 19 GHz. At this frequency τ1/τ2 is 13, still making the approximation (13) valid.
The simulation shows that the charge efficiency varies from 0.8 to infinity with frequency and input amplitude, see Fig. 14. The charge efficiency is smaller (1.0–2.0) at midrange frequencies and larger at higher and lower frequencies. As expected from the effective capacitance plot the charge efficiency is larger for large input amplitudes. The high charge efficiency at high frequencies indicates that the active polyphase technique can be used at frequencies close to the maximum of a chain of cascaded inverters. The addition of the cross-coupling capacitors will not slow the inverters down significantly. This also means that the additional power consumption due to the capacitors will be small.

Charge efficiency of the three-stage active polyphase filter for a frequency range up to approximately f t /2
The influence of phase delay in the transconductor on the quadrature accuracy was investigated with the three-stage active polyphase filter fed by a differential input signal (Fig. 15). The extra phase delay was, as before, added to the delay of g m . For input amplitudes larger than 300 mV (V DD /4) the quadrature error first increases to a maximum at 15–35 degrees delay and then decreases. The quadrature error for smaller signals starts close to zero and then increases with the phase delay.

Quadrature phase error versus phase delay
A sweep of the delay over a full 360° revolution was then performed. Also the voltage gain was plotted this time (Fig. 16). The gain is still high with differential feed, it is reduced by less than 15% compared to quadrature feed (Fig. 12). Only the stable parts where the filter is locked to the input signal is shown. For phase delays in ranges above 0 and 180 degrees the polyphase filter is locked and achieves a quadrature error of less than 4°. When the filter is locked at 180° phase delay the polarities of the outputs are reversed. Surprisingly, the filter is unstable for phase delays just below 360° and 180°.

Simulation of a Quadrature phase error. b Voltage gain versus phase delay
4 Active polyphase filter simulation
The three-stage active polyphase filter (Fig. 17) was simulated on transistor level to evaluate the performance and verify some of the findings of the previous section. The capacitances in the stages are decreasing in size, tuning the three stages to 8, 10, and 12 GHz by weighting the capacitances as {1.2 1.0 0.8} with respect to the nominal value found at the extraction frequency of 10 GHz. The power consumption of the three-stage filter was 40.6 mW from a 1.2 V supply.
Transient simulations in Spectre were used to evaluate the filter. The phase relations were calculated from the time of the zero crossings of the voltage waveforms, that is their crossings with the bias level, after that the initial transients had settled for 100 periods. All phases are relative to the phase of V A in Fig. 17, called I+ hereafter.
The following simulations were performed:
-
Quadrature phase error versus input voltage and frequency with differential feed of the filter, Fig. 18.
-
The voltage gain with differential feed for the same frequency and amplitude range as above, Fig. 19.
-
Quadrature phase error versus input voltage and input differential phase error, δ, with differential feed of the filter (Fig. 20(a)).
-
To verify the robustness of the active filter, corner simulations were performed for five process corners, Fig. 22. The five corners are: tt—typical n- and pMOS, ss—slow n- and pMOS, ff—fast n- and pMOS, sf—slow nMOS and fast pMOS, and fs—fast nMOS and slow pMOS. For each corner the input amplitude was swept at 10 GHz.
-
The phase noise was simulated using the SpectreRF pnoise analysis and compared to an equivalent passive polyphase filter at 10 GHz, Fig. 21. Equivalent means that the passive filter resistances were set to R = 1/g m0.

An active three-stage polyphase filter, where the capacitances C 1,2,3 are weighted as {1.2 1.0 0.8} × g m0/ω0

Transistor simulation results of the active polyphase filter. a Quadrature error versus V in and frequency. b Quadrature error versus V in for the full frequency range. Error of Q− and Q+ phases shown with respect to I+

Transistor simulation results of the active polyphase filter. a Voltage gain versus frequency and input V in . b Voltage gain orthogonal to the frequency axis

a Quadrature phase error versus V in and δ at 10 GHz. b The quadrature error for all three phases versus δ for full range input amplitudes

Noise simulation of the active three-stage polyphase filter and its passive counterpart at 10 GHz

Corner simulation of the active polyphase filter at 10 GHz
The differential feed was realized by connecting the positive phase of the input signal to the 0° and 90° inputs in Fig. 17 and the negative to the two other inputs.
As can be seen in the plot in Fig. 18(a) the quadrature phase error is less than 1° from 6 GHz to 14 GHz over the stable input voltage range. The non-stable range has been left out in Figs. 18, 19 and 20, hence the absence of data for some parts of the plots. There are also some missing data points due to simulation convergence issues. The phase error is frequency dependent, which makes it interesting to view Fig. 18(a) in the phase error-frequency-plane, Fig. 18(b). One can clearly see that the quadrature error is below 1.0° for all stable amplitudes and frequencies.
As can be seen in Fig. 19, the voltage gain at 10 GHz ranges from 5.2 to 0.2 dB when the filter is stable, (V in = 280–600 mV). The filter is stable for V in = 200 mV up to 6.5 GHz with a gain of more than 9 dB. At higher frequencies, larger amplitudes are required to lock the filter to the input signal. At 14 GHz 440 mV is needed, and the gain is then also lower, see Fig. 20(b).
In Fig. 20(a) the output quadrature error is plotted versus input differential errors and input amplitude. Over the full stable input voltage range the output phase error is below ±6.5° for differential errors δ up to ±20°, that is the attenuation of errors is at least three times. The error increases somewhat with the input amplitude, approximately by 2° for large mismatches. This is illustrated by the thickness of the curves in Fig. 20(b), which is Fig. 20(a) viewed in the phase error-δ-plane. There one can also clearly see that the quadrature phase error is within ±6.5° for δ = ±20° and full input amplitude range.
The phase noise of the passive and active polyphase filters are plotted in Fig. 21. The noise of the passive filter is constant and depends solely on the resistances in the filter. Thus the phase noise level is constant versus offset frequency and decreases as the input amplitude increases, and as expected there is a 6 dB difference between V in = 300 mV and V in = 600 mV. For the active polyphase filter the phase noise has a 1/f behavior below 10 MHz offset.
The far out phase noise of the active polyphase filter is about 5 dB better than the passive implementation, flattening out at −173 dBc/Hz (V in = 200 mV) to −180 dBc/Hz (V in = 600 mV).
5 Active polyphase filter robustness simulations
In this section the robustness of the active polyphase filter is examined through different simulations, usually called Process, Voltage, and Temperature (PVT) simulations. Two different process simulations are performed (i) corner simulation and (ii) statistical simulations. Since there are no Monte Carlo data available to us, the physical dimensions of the transistors have been varied in a random fashion in the statistical simulations.
5.1 Process variations
The effect of process variations on the phase error is investigated by corner and statistical simulations of the active three-stage polyphase filter at its centre frequency.
The variations of V T , I d sat , and f T in the different process corners are given in Table 1. The quadrature error of the Q− phase is plotted in Fig. 22 at 10 GHz, for the five corners including the typical in the process. The Q− phase was chosen since it shows the largest quadrature error in Fig. 18(b). The simulations show that the largest quadrature phase error is 4°, when both n- and pMOS are slow. For all other simulated corners the error is below 1.5°. It is worth noticing that the quadrature errors for the corners are in the same order as the speed (↑), current (↑), and threshold (↓) for the corners, that is high speed results in low quadrature error and vice versa.
The statistical simulations were performed by changing the length and width of each transistor and each capacitance of the filter randomly. The physical dimensions of the transistor was changed by ±10% of its minimum feature size, e.g.
where Rand is a rectangular distributed from −0.1 to 0.1 and L nom is the desired value. The filter capacitances were altered ±10% in the same manner. This can be considered rather conservative, as with good layout optimized for matching the standard deviation should not exceed a few %. A run of 500 simulations was performed at 10 GHz with input amplitude of {400, 500, 600} mV. The mean phase error, μ, was {−0.1, 0.1, 0.5} degrees with an associated standard deviation, σ, of {1.91, 1.99, 1.90} degrees. In Fig. 23 the phase error distribution is plotted.

Statistical simulation of the active polyphase filter at 10 GHz. Input amplitude 600 mV and 500 runs. Uniform distribution used
A comparison to the passive polyphase filter counterpart was made by varying the capacitance and resistance by ±10%. The mean phase error was 0 degrees with an associated standard deviation of 3.8°.
5.2 Supply voltage variation
The supply voltage was changed from 0.8 V to 1.8 V for four different input amplitudes at 10 GHz (Fig. 24) to investigate the quadrature sensitivity.

Supply voltage variation of the active polyphase filter at 10 GHz
For small input amplitudes the filter needs almost 1.2 V supplyFootnote 3 to achieve quadrature output. As the input amplitude increases also the supply variation can increase without penalty in quadrature error. With 400 mV input amplitude the supply can be down to 1 V.
5.3 Temperature variation
A temperature sweep from −40 to 120°C was performed with four different input amplitudes at 10 GHz and 1.2 V supply, see Fig. 25. The temperature variation does not significantly affect the quadrature phase error. It changes by no more than 0.7° over the full temperature range.

Temperature dependence of the phase error at 10 GHz
6 Conclusion
A high frequency active polyphase filter has been investigated through model and transistor simulations. The filter uses transconductors instead of resistors as in a passive polyphase filter. When a transconductor is used the input impedance is larger and the filter can amplify the signal. In the simulations the transconductor was a CMOS inverter with a local bias feedback.
Simulations show a robust filter over wide frequency range (6–14 GHz) with an output quadrature error less than 1° for stable input amplitudes. The filter also shows robustness against input differential phase error and inverter delay. The potential of the technique has been demonstrated using the concept of effective capacitance. This indicates that high frequency filters can be realized with low power consumption. Corner simulations have been performed at 10 GHz, and for both n- and pMOS slow the phase error is below 4°, but for all other corners the error is less than 1.5°. The simulated far out phase noise is below that of the corresponding passive filter.
Notes
The input of the second transconductor in Fig. 17 is 270° out of phase with respect to the one above, the transconductor inverts the signal to the output changing the phase to 90°. The output current is integrated reducing the phase by 90°. Thus the signals are in phase.
An iteration has been performed to accurately calculate the large signal g out and c out .
The datapoints where the filter was not producing quadrature output have been cut out of the figure.
References
Tillman, F., & Sjöland, H. (2005). A polyphase filter based on CMOS inverters. In Proceedings of the Norchip Conference, Nov. 2005, pp. 12–15.
Tillman, F., & Sjöland, H. (2007). A polyphase filter based on CMOS inverters. Analog Integrated Circuits and Signal Processing, 50(1), 7–12.
Casha, O., Grech, I., & Micallef, J. (2007). Comparative study of gigahertz CMOS LC quadrature voltage-controlled oscillators with relevance to phase noise. Analog Integrated Circuits and Signal Processing, 52(1–2), 1–14.
Chen, W.-Z., Kuo, C.-L., & Liu, C.-C. (2003). 10 GHz quadrature-phase voltage controlled oscillator and prescaler. In Proceedings of the European Solid-State Circuits Conference, Sep. 2003, pp. 361–364.
Ng, A. W. L., & Luong, H. C. (2007). A 1-V 17-GHz 5-mW CMOS quadrature VCO based on transformer coupling. IEEE Journal of Solid-State Circuits, 42(9), 1933–1941.
Törmänen, M., & Sjöland, H. (2007). A 26-GHz LC-QVCO in 0.13-um CMOS. In Proceedings, Asian-Pacific Microwave Conference, Dec. 2007, pp. 1769–1772.
Abidi, A. A. (2006). CMOS mixers and polyphase filters for large image rejection. IEEE Journal of Solid-State Circuits, 41(8), 1803–1816.
Eken, Y., & Uyemura, J. (2004). The design of a 14 GHz I/Q ring oscillator in 0.18 μm CMOS. In Proceedings of the IEEE International Symposium on Circuits and Systems, ISCAS, May 2004, pp. 133–136.
Liu, H. Q., Goh, W. L., & Siek, L. (2005). A 0.18-μm 10-GHz CMOS ring oscillator for optical transceivers. In Proceedings of the IEEE International Symposium on Circuits and Systems, ISCAS, Vol. 2, May 2005, pp. 1525–1528.
Kodkani, R., & Larson, L. (2006). A 25 GHz quadrature voltage controlled ring oscillator in 0.12 μm SiGe HBT. In Topical Meeting on Silicon Monolithic Integrated Circuits in RF Systems, Jan. 2006, pp. 383–386.
Andreani, P., & Mattisson, S. (2002). On the use of Nauta’s transconductor in low-frequency CMOS g m -C bandpass filters. IEEE Journal of Solid-State Circuits, 37(2), 114–124.
Chou, C.-Y., & Wu, C.-Y. (2005). The design of wideband and low-power CMOS active polyphase filter and its application in RF double-quadrature receivers. IEEE Transactions on Circuits and Systems—Part I: Regular Papers, 52(5), 825–833.
Elmala, M. A. I., & Embabi, S. H. K. (2004). Calibration of phase and gain mismatches in weaver image-reject receiver. IEEE Journal of Solid-State Circuits, 39(2), 283–289.
Stikvoort, E. (2003). Polyphase filter section with OPAMPs. IEEE Transactions on Circuits and Systems—Part II: Express Briefs, 50(6), 376–378.
Behbahani, F., Kishigami, Y., Leete, J., & Abidi, A. A. (2001). Phase noise and jitter in CMOS ring oscillators. IEEE Journal of Solid-State Circuits, 36(6), 873–887.
Song, H. (2006). A general method to VLSI polyphase filter analysis and design for integrated RF applications. In IEEE International SOC Conference, Sep. 2006, pp. 31–34.
Guan, X., & Hajimiri, A. (2004). A 24-GHz CMOS front-end. IEEE Journal of Solid-State Circuits, 39(2), 368–373.
Razavi, B. (1997). Design considerations for direct-conversion receivers. IEEE Transactions on Circuits and Systems—Part I: Regular Papers, 44, 428–435.
Razavi, B. (1998). RF Microelectronics. Upper Saddle River, NJ: Prentice Hall.
Tsividis, Y. P. (1999). Operation and modeling of the MOS transistor (2nd ed.). New York: Oxford University Press, Inc.
Acknowledgements
The authors would like to thank United Microelectronics Corporation (UMC) for giving us the opportunity to work with a state-of-the-art 130-nm CMOS process.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wernehag, J., Sjöland, H. Analysis of a high frequency and wide bandwidth active polyphase filter based on CMOS inverters. Analog Integr Circ Sig Process 59, 243–255 (2009). https://doi.org/10.1007/s10470-008-9261-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10470-008-9261-y