
Abstract
Using a three-variable higher-order shear deformation theory (HSDT), this research proposes an analytical method for studying the free vibration and stability of perfect and imperfect functionally graded (FG) beams resting on variable elastic foundations (VEFs). Unlike the other HSDTs, in this study, the number of unknown functions involved is only three, while the other HSDTs include four unknown functions. Besides, this theory meets the boundary requirements of zero tension on the beam surfaces and allows for hyperbolic distributions of transverse shear stresses without the need for shear correction factors. The elastic medium is supposed to have two parameters (i.e., Winkler–Pasternak foundations), with the Winkler parameter in the longitudinal direction being variable variations (linear, parabolic, sinusoidal, cosine, exponential, and uniform) and the Pasternak parameter being fixed, at first.1 The effective material characteristics of the FG beam are assumed to follow a simple power-law distribution in the thickness direction. Furthermore, the influence of porosity is investigated by considering four distinct types of porosity distribution patterns. First, the equations of motion are derived using Hamilton’s principle, and then Navier’s method is used to solve the system of equations for the FG beam with simply supported ends analytically. The correctness of the current formulation is demonstrated by comparing them with the results of open literature. Finally, parametric studies are done to explore the impacts of various parameters on the free vibration and buckling behaviors of FG beams. The new theory is shown to be not only correct but also simple in predicting the free vibration and buckling responses of FG beams resting on VEFs.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Composite materials with a precisely defined profile are called functionally graded materials (FGMs) and are made by continuously varying volume fractions in the thickness direction. The benefits of these materials in lowering thermal stress and narrowing the gap between the characteristics of different materials have garnered much attention in recent years. The FGMs exhibit optimal behavior due to the continuous variation of their mechanical properties. So FGMs are mainly used in high-tech applications such as aeronautics, biomedical, aerospace, semiconductors, nuclear, and civil engineering. For a good design, to have strong structures, and to reduce the costs associated with their treatment and manufacture, it is crucial to study and understand the behavior of FG structures subjected to various mechanical loads. Through the analysis of the literature, many researchers have established different theories for studying vibrational behaviors [1,2,3,4,5,6,7,8,9,10] and buckling [11,12,13,14,15,16] of different types of FG structures. Using an HSDT, Atmane et al. [17] analyzed the free vibration of simply supported FG plates resting on elastic foundations (EFs). The hygro-thermal effects on the free vibration of laminated composite plates resting on EFs with random system parameters are examined by Kumar et al. [18] using a micromechanical model and the finite element method. Under various boundary conditions, Sobhy [19] examined the buckling and vibration behaviors of an FG sandwich plate resting on a Pasternak EFs. [20] investigated the free vibration of FG plates resting on EFs, considering the influence of transverse shear deformations. Han et al. [21] proposed a quasi-three-dimensional theory for the dynamic reactions of power law and sigmoid FG plates. Nebab et al. [22] investigated the vibration and wave propagation of FG plates resting on EFs. The effect of grading pattern and porosity on the eigen characteristics of the FG porous structure is studied by Ramteke et al. [23] using the isoparametric finite element technique. An analytical solution procedure for the natural frequency analysis of the FG beams has been presented by AlSaid-Alwan and Avcar [24] using different beam theories. Ramteke et al. [25] carried out the static analysis of a two-directional graded structure using a commercial FE method. A numerical model for the calculation of transient deviations of an FG structure taking into account various types of models (power law, sigmoid, and exponential) including a variable distribution of porosity is developed by Ramteke et al. [26]. Avcar et al. [27] studied the natural frequencies of FG sigmoid sandwich beams using HSDT. A three-dimensional (3D) nonlinear formulation based on surface elasticity was presented by Fan et al. [28] to explore the post-buckling thermal characteristics of porous composite nanoplates made of an FGM material having a central cutout with different shapes. Ramteke and Panda [29] obtained the solutions of the free vibration for a multidirectional FG structure by considering the variable gradation models (power law, sigmoid, and exponential), including the effect of the porosity distribution using a mathematical model. Besides, the bending behavior of a functionally graded structure with variable grading patterns as well as variable porosity was studied by Ramteke et al. [30] using the finite element method. Ramteke et al. [31] examined the effect of large-scale geometric nonlinearity on the natural frequencies of the porous graded curved panel structure. Rao et al. [32] investigated the nonlinear bending response of composite rectangular microplates having functionally graded porosity is predicted by incorporating a type of small-scale effect torque stress using isogeometric finite element methodology. In their research, Song et al. [33] used an isogeometric numerical technique incorporating non-uniform rational B-splines to study the nonlinear thermal post-buckling characteristics of a functionally gradient porous material microplate with a central cutout of different shapes. Hadji et al. [34] analyzed the natural frequencies of an imperfect FG sandwich plate resting on two-parameter elastic foundations. Choudhary et al. [35] proposed a numerical study of the deflection responses of a cracked porous FG structure under variable loading conditions. The vibration and buckling behavior of multidirectional P-FGM, S-FGM, and E-FGM porous structures fouled by damage taking into account the effect of porosity, is well discussed by Hissaria et al. [36]. Ramteke et al. [37] determined frequencies of double curvature FG panels considering the influence of multidirectional dimming, large geometric deformation, and porosity. Numerical modelling of the structures of the multidirectional porous panel using a single-layer higher-order polynomial model is proposed by Ramteke et al. [38], taking into account the cubic variation of the displacement in extension to maintaining the necessary stress/strain. Ramteke et al. [39, 40]analyzed the nonlinear dynamic response of FG shell panels in a thermal environment using the finite element method. Sahoo et al. [41] developed a finite element code to analyze the nonlinear free vibration of the FG sandwich shells based on the higher-order shear deformation theory (HSDT). Wang et al. [42] presented nonlinear buckling and post-buckling characteristics of porous composite microplates. The free vibration, modal, and stress state of honeycomb sandwich structures with different boundary conditions were studied by Safaei et al. [43] using the representative volume element method. Feng et al. [44] proposed a novel design of sandwich composites inspired by nature and prepared for vibration suppression, where conventional blended composites and pure epoxy resin samples are also prepared as a reference. The nonlinear static and dynamic behaviors of FG porous structures of varying geometric shapes exposed to mechanical/thermomechanical loadings are investigated by Ramteke and Panda [45,46,47] using HSDT. Ramteke and Panda [48] analyzed the stresses of the bidirectional FG shell panel under variable mechanical loadings, numerically and experimentally.
The first-order shear deformation theory (FSDT) is commonly used to predict the mechanical behaviors of homogeneous and FG structures resting on EFs [49, 50]. Besides, the HSDT is also used to examine the mechanical behaviors of FG structures resting on EFs [51,52,53,54,55,56].
Unlike plate structures, the literature on dynamic response and buckling analysis of FG beams resting on EFs is still limited. Atmane et al. [57] offered a numerical shear displacement model to analyze the free vibration of FG porous beams. Chaht et al. [58] investigated the bending and buckling behaviors of size-dependent FG nano-beams while considering the thickness stretching effect. The static response and free vibration of an FG beam are investigated by Hadji et al. [59] using an HSDT. Vo et al. [60, 61] developed a new quasi-three-dimensional theory to analyze the mechanical behaviors of FG sandwich beams. Akbaş [62] studied the temperature-dependent nonlinear static response of FG porous beams. Al-Shujairi and and Mollamahmutoğlu [63] established a nonlocal deformation theory to investigate the buckling and free vibration behaviors of FG sandwich micro-beams resting on an EF. Sayyad and Ghugal [64] investigated the mechanical behaviors of laminated composite and sandwich beams using trigonometric shear and normal deformation theories. Zenkour and Radwan [65] studied the bending reactions of FG plates resting on Winkler-Pasternak foundations under various boundary conditions using hyperbolic shear deformation theory. Bouiadjra et al. [66] developed an analytical model to investigate the thermodynamic behavior of an FG beam resting on EFs.
The effect of Winkler’s parameter varying in one direction on the behavior of an FG structure resting on an EF has recently been the subject of several recent works [67,68,69,70,71]. The influence of VEFs on the static behavior of FG plates is demonstrated using sinusoidal shear deformation in Nebab et al. [72], while the impact of VEFs on the free vibration of FG plates is presented in Nebab et al. [73]. Merzoug et al. [74] proposed 2D and quasi-3D theories to examine the effect of micromechanical models on the thermoelastic bending of FG beams resting on VEFs. Bouiadjra et al. [75] created an analytical model to investigate the thermodynamic response of FG sandwich plates supported by a VEF. Benaberrahmane et al. [76] analyze the free vibration of bidirectional functional gradient beams resting on a VEF. Atmane et al. [77] established a novel HSDT in the same context to explore the dynamic behavior of FG beams on different EFs. A shear deformation theory with four unknowns based on finite elements is proposed in Giang and Hong’s [78] work to explore the hygro-thermal–mechanical stability of FG porous sandwich plates sitting on VEFs.
As a result of the literature review above, it is seen that most of the research on the behavior of FG beams based on variable foundations is limited to the vibration response of non-porous, i.e., perfect beams. Hence, an attempt to address this issue is made in the present study. To do this, in the current research, an HSDT is proposed to analyze the impact of VEFs on the free vibration and the buckling of FG beams, including porosities. Unlike the other HSDTs, in this study, the number of unknown functions involved is only three, while the other HSDTs include four unknown functions. Besides, this theory meets the boundary requirements of zero tension on the beam surfaces and allows for hyperbolic distributions of transverse shear stresses without the need for shear correction factors. The elastic medium is supposed to have two parameters (i.e., Winkler-Pasternak foundations), with the Winkler parameter in the longitudinal direction being variable variations (linear, parabolic, sinusoidal, cosine, exponential, and uniform) and the Pasternak parameter being fixed, at first. Then, the effective material characteristics of the FG beam are assumed to follow a simple power-law distribution in the thickness direction, and the influence of porosity is investigated by considering four different porosity PDPs. Next, the equations of motion are derived using Hamilton’s principle, and then Navier’s method is used to solve the system of equations for the FG beam with simply supported ends analytically. Finally, parametric studies are done to explore the impacts of various parameters on the free vibration and buckling behaviors of FG beams, such as the power law index, the length-to-thickness ratio, the type of VEFs, and the PDPs.
2 The formulation of the problem
2.1 Geometrical configuration
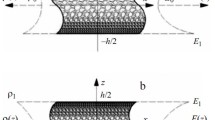
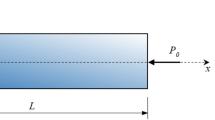
Consider an FG beam resting on the VEFs of length L, width b, and thickness h, as illustrated in Fig. 1. When the x and y axes are located in the middle of the beam, the Cartesian coordinate system (x, y, and z) is taken as the basis for mathematical formulas. Note that both ends of the FG beam are considered to be simply supported. Namely, the following limit intervals are considered:

Configuration of an FG beam resting on the VEFs
2.2 Material properties
The imperfect FG beam with porosity volume fraction \(\alpha \left( {\alpha \ll 1} \right)\) is assumed to be composed of two materials, i.e., metal and ceramic, whose material characteristics vary through the thickness direction, and the volume fractions of these components are dispersed according to the modified rule of mixture [8]:
here \(P_{{\text{c}}}\) and \(P_{{\text{m}}}\), denote material characteristics of ceramic and metal, and \(V_{{\text{c}}}\) and \(V_{{\text{m}}}\), indicate volume fraction of ceramic and metal, respectively. Note that the material properties of a perfect beam can be obtained by setting the porosity volume fraction to zero (α = 0).
The following relationship exists between the total volume fraction of the metal and ceramic constituents:
The power law function for the volume fraction of ceramic is defined as follows:
here \(z\) is the distance from the mid-plane and \(p\) is the power law index (\(0 \le p \le \infty\)), and the beam is entirely composed of ceramic as \(p = 0\), whereas when \(p = \infty\), the beam is wholly comprised of metal.
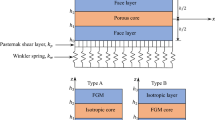
According to the modified rule of mixture, material characteristics, i.e., Young’s modulus and density, of the IP-FG beam may be written; Table 1 shows the expressions and illustrations for material characteristics of the IP-FG beam for different PDPs, i.e., Homogenous (H), X, O, and V PDPs [79,80,81].
In this study, the Poisson’s ratio is kept constant since its impact is very low compared to the effect of Young’s modulus on the mechanical behaviors of perfect FG beams [66, 82].
2.3 Variables of the EFs
The IP-FG beam is supposed to rest on an elastic foundation with multiple layers. The first layer consists of Winkler springs without including the coupling effect, whereas the second layer is connected to the first one by the shear layer of Pasternak. The following general formulation describes the Winkler-Pasternak EFs:
where Re(x) is the reaction of the EF, Kw(x) is Winkler’s variable parameter, Kp is the Pasternak parameter of the shear layer; note that if the shear layer is neglected, the Winkler–Pasternak EFs transform to the Winkler EF [83,84,85,86].
where: Kw(x) is the variable Winkler foundation stiffness, \(k_{{\text{w}}}\) and \(\psi\) are constant and variable parameters. Note that if \(\psi\) is zero, the EF becomes uniform Winkler–Pasternak EFs.
2.4 Kinematics and strains
Based on HSDT, the current displacement field contains three unknowns [9, 77, 87] as follows:
To minimize the number of unknown variables, indefinite integrals have been introduced in the displacement field. Note that, \(\varphi_{x} = \int {\theta (x,t)\,{\text{d}}x}\) is considered in the displacement mentioned above, where, \(u_{0}\) is the displacement of the mid-plane of the FG beam in the longitudinal direction, \(\theta\) and \(w_{0}\) represent the shear and bending components of transverse displacement, respectively, and \(f(z)\) is the shape function based on HSDT that governs the distribution of the transverse shear satisfying across the stress-free boundary conditions on the top and bottom surfaces of the FG beam. In this study, a sinusoidal type shape function proposed by Touratier [88] is expressed as follows:
According to the theory of linear elasticity of small strains, the linear strain can be defined as follows:
here
and
Using Navier’s approach, the format derivation of the undefined integral included in the strains relation may be simplified and rewritten as follows:
here following definitions apply
and
2.5 Constitutive equations
Transverse shear and normal deformations are considered in the stress and strain relationships as follows:
where \(\left( {\sigma_{x} ,\tau_{xz} } \right)\), \(\left( {\varepsilon_{x} \gamma_{xz} } \right)\) and \(C_{ij}\) are the components of stress and strain and stiffness coefficients which can be defined as below, respectively:
2.6 Equations of motion
The equations of motion for FG beams resting on VEFs are derived using the Hamilton principle as below [17, 89,90,91,92]:
where \(\delta\) indicates the variation, U, Uef, K and V represent the strain energy, the strain energy of EFs, the kinetic energy of the FG beam, and the variation of the external work done by the applied external load.
The variation of the strain energy of the FG beam can be expressed as:
where
The variation of the strain energy of VEFs can be given as:
The variation in kinetic energy may be expressed as follows:
where the dot-exponent (\(^{ \cdot }\)) indicates the differentiation concerning the time variable t, and the mass moment of inertias may be defined as:
The variation of the external work may be given as:
where \(N_{x}^{0}\) is the applied axial load.
By inserting the expressions of δU, δUef, δK and δV from Eqs. (17), (19), (20) and (22) in Eq. (16) and integrating by parts and collecting the coefficients of (\(\delta u_{0}\), \(\delta w_{0}\) and \(\delta \theta\)), the equation of motion of FG beam resting on VEFs is found as follows:
Inserting Eq. (12) into Eq. (14) and the consequent outcomes in Eq. (18), the stress resultants are found concerning strains as:
and
where the stiffness components are:
Substituting Eqs. (24)–(26) in Eq. (23), the equations of motion for FG beams resting on VEFs may be rewritten regarding the displacements (\(u_{0}\), \(w_{0}\) and \(\theta\)):
3 Analytical solution
Navier’s method is employed to solve the governing differential equation of the current problem. For this aim, the following series of Fourier is utilized:
here U, W and X are random unknown parameters to be found and \(\omega\) is the natural frequency. Note that, \(\sqrt i = - 1\) is the imaginary unit.
For the free vibration of FG beams resting on VEFs, Eq. (28) is inserted in the equations of motion (27), and finally, the following eigenvalue equations are found for any fixed value of m:
Additionally, the following equation is found for the buckling of FG beams resting on VEFs:
where
and
4 Numerical results
This section presents various examples, including validations for the free vibration and buckling of the FG beams resting on VEFs. The FG beam is supposed to be made of a mixture of metal (Aluminum, Al) and ceramic (Alumina, Al2O3):
Ceramic (Alumina, Al2O3): Ec = 380 GPa, ν = 0.3 and ρc = 3960 kg/m3.
Metal (Aluminium, Al): Em = 70 GPa, ν = 0.3 and ρm = 2702 kg/m3.
For the sake of simplicity and comparisons, the following dimensionless parameters are used for the natural frequency and critical buckling load:
4.1 Validation studies
In this section, the accuracy of the proposed formulation is validated. Isotropic beams, FG beams, as well as different cases of geometry, foundation parameters, and thickness (thin or thick) are considered.
4.1.1 Comparison study 1: investigation of the free vibration of FG beams
Table 2 shows the comparisons of the values of dimensionless natural frequencies (DNFs) of the P-FG beams with the results of Nguyen et al. [93], Ibnorachid et al. [94] and Simsek [95].
Besides, the present results are also validated for isotropic homogenous beams resting on Winkler–Pasternak EFs with the results of Chen et al. [96], Fahsi et al. [97], and Chikh [98] in Table 3.
Consequently, the results obtained and given in Tables 2 and 3 are compatible with those available in the literature, so these results validate the validity of the current formulation for natural frequency analysis of FG beams with and without EFs.
4.1.2 Comparison study 2: investigation of the buckling of FG beams
Table 4 shows the comparisons of the values of dimensionless buckling loads (DBLs) P-FG beams with the results of Nguyen et al. [93] and Vo et al. [99].
Table 5 compares the DBLs of the homogeneous slender beams (L/h = 20) resting on two-parameter EFs with the results of Atmane et al. [53], Fahsi et al. [97], and Chikh [98].
According to the two comparisons mentioned above, it is concluded that the present formulation using a new beam theory with three unknowns is in good agreement with the solutions given by the previously mentioned works.
4.2 Parametrical studies
4.2.1 Study 1: effects of VEFs on the DNFs of FG-beams
In this example, the effects of the variation of the Winkler parameter of the EFs on the DNFs of P-FG beams are examined. For this context, Figs. 2, 3 and 4 show the variation of dimensionless fundamental natural frequencies (DFNFs) FG beams resting on different types of EFs (linear, parabolic, sinusoidal, cosine, exponential, and uniform) versus power-law index (p) and length-to-thickness ratio (L/h), and coefficient ψ, respectively. Figure 2. shows that the DFNFs increase with the rise of p for the types of uniform and parabolic EFs, whereas the DFNFs decrease for the other kinds of EFs with the growth of p. Figure 3. illustrates that the DFNFs increase with the rise of L/h for all types of EFs. Figure 4 demonstrates that the DFNFs increase with the rise in the coefficient ψ, except in the case of a parabolic EF, where the relation between the DNF and coefficient ψ becomes an inverse. Furthermore, the sinusoidal variation of the Winkler EF results in the highest DFNFs, whereas the lowest DFNFs are observed for the parabolic variation of the Winkler EF in all cases.

The variation of DFNF of P-FG beams with different types of EFs versus p (L/h = 5, kw = 100, kp = 10 and \(\psi\) =20)

The variation of DFNF of P-FG beams with different types of EFs versus L/h (p = 2, kw = 100, kp = 10 and \(\psi\) =20)

The variation of DFNF of P-FG beams with different types of EFs versus coefficient \(\psi\) coefficient (p = 2, L/h = 10, kw = 100 and kp = 10)
4.2.2 Study 2: effects of VEFs on the DBLs of FG-beams
In the second study, the effects of the variation of the Winkler parameter of the EFs on the DBLs of P-FG beams are investigated. For this framework, Figs. 5, 6 and 7 demonstrate the variation of DBLs FG beams resting on different types of EFs against the power-law index (p), length-to-thickness ratio (L/h), and coefficient ψ, respectively. According to Fig. 5, it is clear that DBLs decrease with the increment of p. Furthermore, the highest values of DBLs are observed in the sinusoidal variation of the Winkler EF. Interestingly, the DBLs decline rapidly for p < 2, i.e., for FG beams with high stiffness, and then it remains nearly constant as the FG beam becomes softer.

The variation of DBL of P-FG beams with different types of EFs versus p(L/h = 10, kw = 10, kp = 10 and \(\psi\) = 20)

The variation of DBL of P-FG beams with different types of EFs versus L/h (p = 2, kw = 10, kp = 10 and \(\psi\) =20)

The variation of DBL of P-FG beams with different types of EFs versus \(\psi\) (L/h = 10, kw = 10, ks = 10 and \(p\) =2)
Figure 6 illustrates a beam FG with the different types of foundations whose power index is taken to be 2. We can notice from this figure that the values of DBL increase slightly with the increase of the value of the ratio (L/h), in particular for (L/h \(\in\)] 2, 10[), then the rate of variation of Ncr tends to stabilize. In addition, the same mechanical behavior is observed for the variation of DBL as a function of coefficient ψ (Fig. 7), except that the increase in the DBL is more significant than that observed in Fig. 6 for linear foundations, sinusoidal, cosine, and exponential. For the case of the FG beam resting on an elastic foundation of a form of parabolic variation, the parameter DBL decreases with the increase in the coefficient ψ. It can also be seen that the maximum and minimum values of the DBL are obtained for the cases of beams with sinusoidal and parabolic EFs, respectively.
After this analysis, it could be concluded that the sigmoidal variation of the Winkler foundation should be used to obtain a higher natural frequency and critical buckling load in the design of FG beams.
4.2.3 Study 3: investigation of the free vibration of imperfect FG beams
The curves of variation of the DNF of the first mode of the different beams FG according to the parameter of power index of the material “p” with four models of the distribution of porosity, namely type 1 (uniform), type 2 (X shape), type 3 (O shape) and type 4 (V shape) and different porosity coefficients (α = 0; 0.1 and 0.2) have been presented in Figs. 8, 9, 10 and 11 for different types of distribution of Winkler EFs: constant, linear, parabolic and sigmoid, respectively.

The variation of FNF of imperfect FG beams resting on constant type of VEFs according to p (kw = 10 and kp = 10)

The variation of DFNF of imperfect FG beams resting on linear type of VEFs according to p (kw = 10, kp = 10 and \(\psi\) =20)

The variation of DFNF of imperfect FG beams resting on parabolic type of VEFs according to p (kw = 10, kp = 10 and \(\psi\) =20)

The variation of DFNF of imperfect FG beams resting on sigmoidal type of VEFs according to p (kw = 10, kp = 10 and \(\psi\) =20)
It can be seen from the curves of Figs. 8, 9, 10 and 11 that the increase in the porosity parameter leads to the rise in the DFNF of the FG beams. It is also quite remarkable that the parameter of the DFNF of the FG beams also increases with the increase of the parameter of the material for the two cases of the thickness ratios L/h = 5 and 20, except that the case of the beams FG for L/h = 5. The increase in DFNF stops when the “p” equals 2, whereas it begins to decrease with the rise in “p”.
This can be explained by the decrease in the stiffness of the FG beam with the increase in the percentage of pores, which led to the weakening of the FG beam. In addition, it is observed that the maximum DFNF is obtained for the FG beams with a porosity factor equal to 0.2; this remark concerns all the cases studied regardless of the type of porosity distribution form or the type of VEFs. It can also be seen that the ratio (L/h) considerably affects the DFNF of the FG beam.
4.2.4 Study 4: investigation of the buckling of imperfect FG beams
The parametric study of this last example covers the effects of the porosity coefficient and the shape of the porosity distribution on the stability (dimensionless buckling loads DBLs) of the P-FGM porous beam resting on VEFs under an axial load.
The buckling analysis is performed on the FG beam resting on VEFs whose variation of the Winkler parameter is in linear, parabolic, and sinusoidal form, of L∕h = 5 and 20. The effect of porosity volume fraction and distribution pattern (H, X, O and V) on the buckling behavior is given in Table 6. The foundation parameters kw, kp and the coefficient ψ are taken to be 100, 2.5 and 5, respectively. It can be seen that the DBL increases monotonically when the power index “p” and the porosity parameter “α” decrease. It is also observed that DBL decreases as the L/h decreases. In addition, the lowest values of the DBL are obtained for the case of the H-PDP, whereas the highest values of the DBL are found for the case of the X-PDP. In perspective of this work, it is planned to apply a Quasi-3D theory for the analysis of the mechanical behavior of functionally graded porous beams resting on elastic foundations whose two parameters of Winkler and Pasternak are taken to be varied in the direction of the length of the beam under the combination of the different types of loading (thermal, mechanical, hygrothermal).
5 Conclusions
The vibration response and stability of perfect and imperfect FG beams resting on VEFs are investigated in this work using a novel high-order theory of successful SDT. The current HSDT has only three unknowns without needing a shear correction coefficient, which means it is better than other similar HSDTs found in the literature. The FG beams are assumed to rest on VEFs. Because the beam is supposed to be simply supported, and the analytical solution is obtained using the Navier solution method. The impacts of various parameters on the free vibration and buckling behaviors of FG beams, such as the power law index, the length-to-thickness ratio, the type of VEFs, and the porosity distribution patterns, are examined in detail. For the shear deformation theory used in this article, the results obtained were compared against those reported by various beam theories. Thus, the developed HSDT produces results with good precision compared to other HSDTs with a higher number of unknowns. Finally, it can be said that the proposed theory effectively predicts the effect of VEFs on the analysis of the dynamic and buckling behaviors of porous FG beams.
Based on the results obtained, the following conclusions can be drawn from this analysis:
-
The length-to-thickness ratio significantly impacts DNF and DBL.
-
The DBL increase as the length-to-thickness ratio increases.
-
The DFNF decreases when the volume fraction index increases.
-
The DBL decreases with the increment of the power law index.
-
The type of elastic Winkler foundation variable along the axial direction (linear, parabolic, sinusoidal, cosine, exponential and uniform) has a considerable effect on the variation of DFNF and DBL of FG beams.
-
In the presence of porosity, the DFNs of the FG beams increase, whereas the DBL decreases.
In the future, the present study will be extended to the several mechanical behaviors of FG beams under different thermal loads and other boundary conditions.
References
Reddy, J.N.: Analysis of functionally graded plates. Int. J. Numer. Methods Eng. 47, 663–684 (2000). https://doi.org/10.1002/(SICI)1097-0207(20000110/30)47:1/3
Malekzadeh, P.: Three-dimensional free vibration analysis of thick functionally graded plates on elastic foundations. Compos. Struct. 89, 367–373 (2009). https://doi.org/10.1016/J.COMPSTRUCT.2008.08.007
Shen, H.S., Wang, Z.X.: Assessment of Voigt and Mori-Tanaka models for vibration analysis of functionally graded plates. Compos. Struct. 94, 2197–2208 (2012). https://doi.org/10.1016/J.COMPSTRUCT.2012.02.018
Thai, H.T., Choi, D.H.: A refined shear deformation theory for free vibration of functionally graded plates on elastic foundation. Compos. Part B Eng. 43, 2335–2347 (2012). https://doi.org/10.1016/J.COMPOSITESB.2011.11.062
Bennai, R., Atmane, H.A., Tounsi, A.: A new higher-order shear and normal deformation theory for functionally graded sandwich beams. Steel Compos. Struct. 19, 521–546 (2015). https://doi.org/10.12989/scs.2015.19.3.521
Mantari, J.L.: Free vibration of advanced composite plates resting on elastic foundations based on refined non-polynomial theory. Meccanica 50, 2369–2390 (2015). https://doi.org/10.1007/S11012-015-0160-X
Benferhat, R., Daouadji, T.H., Mansour, M.S., Hadji, L.: Effect of porosity on the bending and free vibration response of functionally graded plates resting on Winkler-Pasternak foundations. Earthq. Struct. 10, 1429–1449 (2016). https://doi.org/10.12989/EAS.2016.10.6.1429
Avcar, M.: Free vibration of imperfect sigmoid and power law functionally graded beams. Steel Compos. Struct. 30, 603–615 (2019). https://doi.org/10.12989/SCS.2019.30.6.603
Batou, B., Nebab, M., Bennai, R., Atmane, H.A., Tounsi, A., Bouremana, M.: Wave dispersion properties in imperfect sigmoid plates using various HSDTs. Steel Compos. Struct. 33, 699–716 (2019). https://doi.org/10.12989/scs.2019.33.5.699
Frahlia, H., Bennai, R., Nebab, M., Atmane, H.A., Tounsi, A.: Assessing effects of parameters of viscoelastic foundation on the dynamic response of functionally graded plates using a novel HSDT theory. Mech. Adv. Mater. Struct. (2022). https://doi.org/10.1080/15376494.2022.2062632
Dehghan, M., Baradaran, G.H.: Buckling and free vibration analysis of thick rectangular plates resting on elastic foundation using mixed finite element and differential quadrature method. Appl. Math. Comput. 218, 2772–2784 (2011). https://doi.org/10.1016/J.AMC.2011.08.020
Grover, N., Maiti, D.K., Singh, B.N.: A new inverse hyperbolic shear deformation theory for static and buckling analysis of laminated composite and sandwich plates. Compos. Struct. 95, 667–675 (2013). https://doi.org/10.1016/J.COMPSTRUCT.2012.08.012
Yaghoobi, H., Fereidoon, A.: Mechanical and thermal buckling analysis of functionally graded plates resting on elastic foundations: an assessment of a simple refined nth-order shear deformation theory. Compos. Part B Eng. 62, 54–64 (2014). https://doi.org/10.1016/J.COMPOSITESB.2014.02.014
Barati, M.R., Sadr, M.H., Zenkour, A.M.: Buckling analysis of higher order graded smart piezoelectric plates with porosities resting on elastic foundation. Int. J. Mech. Sci. 117, 309–320 (2016). https://doi.org/10.1016/J.IJMECSCI.2016.09.012
Meksi, R., Benyoucef, S., Mahmoudi, A., Tounsi, A., Adda Bedia, E.A., Mahmoud, S.: An analytical solution for bending, buckling and vibration responses of FGM sandwich plates. J. Sandw. Struct. Mater. 21, 727–757 (2019). https://doi.org/10.1177/1099636217698443
Hajlaoui, A., Dammak, F.: A modified first shear deformation theory for three-dimensional thermal post-buckling analysis of FGM plates. Meccanica 57, 337–353 (2022). https://doi.org/10.1007/S11012-021-01427-Y/TABLES/5
Atmane, H.A., Tounsi, A., Mechab, I., Bedia, E.A.A.: Free vibration analysis of functionally graded plates resting on Winkler–Pasternak elastic foundations using a new shear deformation theory. Int. J. Mech. Mater. Des. 6, 113–121 (2010). https://doi.org/10.1007/S10999-010-9110-X
Kumar, R., Patil, H., Thermoplastic, A.L.-J.: Hygrothermoelastic free vibration response of laminated composite plates resting on elastic foundations with random system properties: micromechanical. J. Thermoplast. Compos. Mater. 26, 573–604 (2013). https://doi.org/10.1177/0892705711425851
Sobhy, M.: Buckling and free vibration of exponentially graded sandwich plates resting on elastic foundations under various boundary conditions. Compos. Struct. 99, 76–87 (2013). https://doi.org/10.1016/J.COMPSTRUCT.2012.11.018
Akavci, S.S.: An efficient shear deformation theory for free vibration of functionally graded thick rectangular plates on elastic foundation. Compos. Struct. 108, 667–676 (2014). https://doi.org/10.1016/J.COMPSTRUCT.2013.10.019
Han, S.C., Park, W.T., Jung, W.Y.: 3D graphical dynamic responses of FGM plates on Pasternak elastic foundation based on quasi-3D shear and normal deformation theory. Compos. Part B Eng. 95, 324–334 (2016). https://doi.org/10.1016/J.COMPOSITESB.2016.04.018
Nebab, M., Atmane, H.A., Bennai, R., Tounsi, A., Bedia, E.A.A.: Vibration response and wave propagation in FG plates resting on elastic foundations using HSDT. Struct. Eng. Mech. Int. J. 69, 511–525 (2019)
Ramteke, P.M., Panda, S.K., Sharma, N., Ramteke, P.M., Panda, S.K., Sharma, N.: Effect of grading pattern and porosity on the eigen characteristics of porous functionally graded structure. Steel Compos. Struct. 33, 865 (2019). https://doi.org/10.12989/SCS.2019.33.6.865
AlSaid-Alwan, H.H.S., Avcar, M.: Analytical solution of free vibration of FG beam utilizing different types of beam theories: a comparative study. Comput. Concr. Int. J. 26, 285–292 (2020)
Ramteke, P.M., Mahapatra, B.P., Panda, S.K., Sharma, N.: Static deflection simulation study of 2D Functionally graded porous structure. Mater. Today Proc. 33, 5544–5547 (2020). https://doi.org/10.1016/J.MATPR.2020.03.537
Ramteke, P.M., Patel, B., Panda, S.K.: Time-dependent deflection responses of porous FGM structure including pattern and porosity. Int. J. Appl Mech. (2020). https://doi.org/10.1142/S1758825120501021
Avcar, M., Hadji, L., Civalek, Ö.: Natural frequency analysis of sigmoid functionally graded sandwich beams in the framework of high order shear deformation theory. Compos. Struct. 276, 114564 (2021). https://doi.org/10.1016/J.COMPSTRUCT.2021.114564
Fan, F., Cai, X., Sahmani, S., Safaei, B.: Isogeometric thermal postbuckling analysis of porous FGM quasi-3D nanoplates having cutouts with different shapes based upon surface stress elasticity. Compos. Struct. 262, 113604 (2021). https://doi.org/10.1016/J.COMPSTRUCT.2021.113604
Ramteke, P.M., Panda, S.K.: Free vibrational behaviour of multi-directional porous functionally graded structures. Arab. J. Sci. Eng. 46, 7741–7756 (2021). https://doi.org/10.1007/S13369-021-05461-6/TABLES/7
Ramteke, P.M., Mehar, K., Sharma, N., Panda, S.K.: Numerical prediction of deflection and stress responses of functionally graded structure for grading patterns (power-law, sigmoid, and exponential) and variable porosity (even/uneven). Sci. Iran. 28, 811–829 (2021). https://doi.org/10.24200/SCI.2020.55581.4290
Ramteke, P.M., Patel, B., Panda, S.K.: Nonlinear eigenfrequency prediction of functionally graded porous structure with different grading patterns. Waves Random Complex Media (2021). https://doi.org/10.1080/17455030.2021.2005850
Rao, R., Sahmani, S., Safaei, B.: Isogeometric nonlinear bending analysis of porous FG composite microplates with a central cutout modeled by the couple stress continuum quasi-3D plate theory. Arch. Civ. Mech. Eng. 21, 1–17 (2021). https://doi.org/10.1007/S43452-021-00250-2/METRICS
Song, R., Sahmani, S., Safaei, B.: Isogeometric nonlocal strain gradient quasi-three-dimensional plate model for thermal postbuckling of porous functionally graded microplates with central cutout with different shapes. Appl. Math. Mech. (Engl. Ed.) 42, 771–786 (2021). https://doi.org/10.1007/S10483-021-2725-7/METRICS
Hadji, L., Avcar, M., Zouatnia, N.: Natural frequency analysis of imperfect FG sandwich plates resting on Winkler–Pasternak foundation. Mater. Today Proc. (2022). https://doi.org/10.1016/J.MATPR.2021.12.485
Choudhary, J., Patle, B.K., Ramteke, P.M., Hirwani, C.K., Panda, S.K., Katariya, P.V.: Static and dynamic deflection characteristics of cracked porous FG panels. Int. J. Appl. Mech. (2022). https://doi.org/10.1142/S1758825122500764
Hissaria, P., Ramteke, P.M., Hirwani, C.K., Mahmoud, S.R., Kumar, E.K., Panda, S.K.: Numerical Investigation of eigenvalue characteristics (vibration and buckling) of damaged porous bidirectional FG panels. J. Vib. Eng. Technol. 1, 1–13 (2022). https://doi.org/10.1007/S42417-022-00677-8/TABLES/10
Ramteke, P.M., Panda, S.K., Patel, B.: Nonlinear eigenfrequency characteristics of multi-directional functionally graded porous panels. Compos. Struct. 279, 114707 (2022). https://doi.org/10.1016/J.COMPSTRUCT.2021.114707
Ramteke, P.M., Sharma, N., Choudhary, J., Hissaria, P., Panda, S.K.: Multidirectional grading influence on static/dynamic deflection and stress responses of porous FG panel structure: a micromechanical approach. Eng. Comput. 38, 3077–3097 (2022). https://doi.org/10.1007/S00366-021-01449-W/FIGURES/18
Ramteke, P.M., Panda, S.K., Sharma, N.: Nonlinear vibration analysis of multidirectional porous functionally graded panel under thermal environment. AIAA J. 60, 4923–4933 (2022). https://doi.org/10.2514/1.J061635
Ramteke, P.M., Kumar, V., Sharma, N., Panda, S.K.: Geometrical nonlinear numerical frequency prediction of porous functionally graded shell panel under thermal environment. Int. J. Non-Linear Mech. 143, 104041 (2022). https://doi.org/10.1016/J.IJNONLINMEC.2022.104041
Sahoo, B., Sharma, N., Sahoo, B., Malhari Ramteke, P., Kumar Panda, S., Mahmoud, S.R.: Nonlinear vibration analysis of FGM sandwich structure under thermal loadings. Structures 44, 1392–1402 (2022). https://doi.org/10.1016/J.ISTRUC.2022.08.081
Wang, J., Ma, B., Gao, J., Liu, H., Safaei, B., Sahmani, S.: Nonlinear stability characteristics of porous graded composite microplates including various microstructural-dependent strain gradient tensors. Int. J. Appl. Mech. (2022). https://doi.org/10.1142/S1758825121501295
Safaei, B., Onyibo, E.C., Goren, M., Kotrasova, K., Yang, Z., Arman, S., Asmael, M.: Free vibration investigation on rve of proposed honeycomb sandwich beam and material selection optimization. Fact. Univ. Ser. Mech. Eng. 21, 031–050 (2023). https://doi.org/10.22190/FUME220806042S
Feng, J., Safaei, B., Qin, Z., Chu, F.: Nature-inspired energy dissipation sandwich composites reinforced with high-friction graphene. Compos. Sci. Technol. 233, 109925 (2023). https://doi.org/10.1016/J.COMPSCITECH.2023.109925
Ramteke, P.M., Panda, S.K.: Nonlinear static and dynamic (deflection/stress) responses of porous functionally graded shell panel and experimental validation. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. (2023). https://doi.org/10.1177/09544062231155099
Ramteke, P.M., Panda, S.K.: Computational modelling and experimental challenges of linear and nonlinear analysis of porous graded structure: a comprehensive review. Arch. Comput. Methods Eng. 2023(1), 1–16 (2023). https://doi.org/10.1007/S11831-023-09908-X
Ramteke, P.M., Panda, S.K.: Nonlinear thermomechanical static and dynamic responses of bidirectional porous functionally graded shell panels and experimental verifications. J. Press. Vessel Technol. (2023). https://doi.org/10.1115/1.4062154
Malhari Ramteke, P., Kumar Panda, S.: Nonlinear static and dynamic response prediction of bidirectional doubly-curved porous FG panel and experimental validation. Compos. Part A Appl. Sci. Manuf. 166, 107388 (2023). https://doi.org/10.1016/J.COMPOSITESA.2022.107388
Mantari, J.L., Granados, E.V.: An original FSDT to study advanced composites on elastic foundation. Thin-Walled Struct. 107, 80–89 (2016). https://doi.org/10.1016/J.TWS.2016.05.024
Park, M., Choi, D.H.: A simplified first-order shear deformation theory for bending, buckling and free vibration analyses of isotropic plates on elastic foundations, vol. 22, pp. 1235–1249. Springer, Berlin (2018). https://doi.org/10.1007/s12205-017-1517-6
Said, A., Ameur, M., Bousahla, A.A., Tounsi, A.: A new simple hyperbolic shear deformation theory for functionally graded plates resting on winkler-pasternak elastic foundations. Int. J. Comput. Methods (2014). https://doi.org/10.1142/S0219876213500989
Xiang, S., Kang, G.W., Liu, Y.: A nth-order shear deformation theory for natural frequency of the functionally graded plates on elastic foundations. Compos. Struct. 111, 224–231 (2014). https://doi.org/10.1016/J.COMPSTRUCT.2014.01.004
Atmane, H.A., Tounsi, A., Bernard, F.: Effect of thickness stretching and porosity on mechanical response of a functionally graded beams resting on elastic foundations. Int. J. Mech. Mater. Des. 13, 71–84 (2017). https://doi.org/10.1007/S10999-015-9318-X
Benahmed, A., Houari, M.S.A., Benyoucef, S., Belakhdar, K., Tounsi, A.: A novel quasi-3D hyperbolic shear deformation theory for functionally graded thick rectangular plates on elastic foundation. Geomech. Eng. 12, 9–34 (2017). https://doi.org/10.12989/GAE.2017.12.1.009
Shahsavari, D., Shahsavari, M., Li, L., Karami, B.: A novel quasi-3D hyperbolic theory for free vibration of FG plates with porosities resting on Winkler/Pasternak/Kerr foundation. Aerosp. Sci. Technol. 72, 134–149 (2018). https://doi.org/10.1016/J.AST.2017.11.004
Mellal, F., Bennai, R., Nebab, M., Atmane, H.A., Bourada, F., Hussain, M., Tounsi, A., Abbes, B., Sidi, B., Abbes, A.: Investigation on the effect of porosity on wave propagation in FGM plates resting on elastic foundations via a quasi-3D HSDT. Waves Random Complex Media (2021). https://doi.org/10.1080/17455030.2021.1983235
Atmane, H.A., Tounsi, A., Bernard, F., Mahmoud, S.R., Tounsi, A., Bernard, F., Mahmoud, S.R.: A computational shear displacement model for vibrational analysis of functionally graded beams with porosities. Steel Compos. Struct. 19, 369 (2015). https://doi.org/10.12989/SCS.2015.19.2.369
Chaht, F.L., Kaci, A., Houari, M.S.A., Tounsi, A., Bég, O.A., Mahmoud, S.R.: Bending and buckling analyses of functionally graded material (FGM) size-dependent nanoscale beams including the thickness stretching effect. Steel Compos. Struct. 18, 425–442 (2015). https://doi.org/10.12989/scs.2015.18.2.425
Hadji, L., Daouadji, T.H., Tounsi, A., Bedia, E.A.: A higher order shear deformation theory for static and free vibration of FGM beam. Steel Compos. Struct. 16, 507–519 (2014). https://doi.org/10.12989/scs.2014.16.5.507
Vo, T.P., Thai, H.-T., Nguyen, T.-K., Inam, F., Lee, J.: A quasi-3D theory for vibration and buckling of functionally graded sandwich beams. Compos. Struct. 119, 1–12 (2015). https://doi.org/10.1016/j.compstruct.2014.08.006
Vo, T.P., Thai, H.-T., Nguyen, T.-K., Inam, F., Lee, J.: Static behaviour of functionally graded sandwich beams using a quasi-3D theory. Compos. Part B Eng. 68, 59–74 (2015). https://doi.org/10.1016/J.COMPOSITESB.2014.08.030
Akbaş, ŞD.: Nonlinear static analysis of functionally graded porous beams under thermal effect. Coupled Syst. Mech. 6, 399–415 (2017). https://doi.org/10.12989/csm.2017.6.4.399
Al-shujairi, M., Mollamahmutoğlu, Ç.: Buckling and free vibration analysis of functionally graded sandwich micro-beams resting on elastic foundation by using nonlocal strain gradient theory in conjunction with higher order shear theories under thermal effect. Compos. Part B Eng. 154, 292–312 (2018). https://doi.org/10.1016/J.COMPOSITESB.2018.08.103
Sayyad, A.S., Ghugal, Y.M.: Effect of thickness stretching on the static deformations, natural frequencies, and critical buckling loads of laminated composite and sandwich beams. J. Braz. Soc. Mech. Sci. Eng. (2018). https://doi.org/10.1007/S40430-018-1222-5
Zenkour, A.M., Radwan, A.F.: Compressive study of functionally graded plates resting on Winkler–Pasternak foundations under various boundary conditions using hyperbolic shear deformation theory. Arch. Civ. Mech. Eng. 18, 645–658 (2018). https://doi.org/10.1016/J.ACME.2017.10.003
Bouiadjra, R.B., Bachiri, A., Benyoucef, S., Fahsi, B., Bernard, F.: An investigation of the thermodynamic effect on the response of FG beam on elastic foundation. Struct. Eng. Mech. 76, 115–127 (2020). https://doi.org/10.12989/SEM.2020.76.1.115
Tsiatas, G.C.: Nonlinear analysis of non-uniform beams on nonlinear elastic foundation. Acta Mech. 209, 141–152 (2010). https://doi.org/10.1007/s00707-009-0174-3
Foyouzat, M.A., Mofid, M., Akin, J.E.: On the dynamic response of beams on elastic foundations with variable modulus. Acta Mech. 227, 549–564 (2016). https://doi.org/10.1007/S00707-015-1485-1/METRICS
Froio, D., Rizzi, E.: Analytical solution for the elastic bending of beams lying on a variable Winkler support. Acta Mech. 227, 1157–1179 (2016). https://doi.org/10.1007/S00707-015-1508-Y/METRICS
Doeva, O., Masjedi, P.K., Weaver, P.M.: Static analysis of composite beams on variable stiffness elastic foundations by the Homotopy Analysis Method. Acta Mech. 232, 4169–4188 (2021). https://doi.org/10.1007/S00707-021-03043-Z/FIGURES/7
Daikh, A.A., Belarbi, M.O., Ahmed, D., Houari, M.S.A., Avcar, M., Tounsi, A., Eltaher, M.A.: Static analysis of functionally graded plate structures resting on variable elastic foundation under various boundary conditions. Acta Mech. 234, 775–806 (2023). https://doi.org/10.1007/S00707-022-03405-1/FIGURES/14
Nebab, M., Atmane, H.A., Bennai, R., Tahar, B.: Effect of nonlinear elastic foundations on dynamic behavior of FG plates using four-unknown plate theory. Earthq. Struct. 17, 447–462 (2019). https://doi.org/10.12989/EAS.2019.17.5.447
Nebab, M., Atmane, H.A., Bennai, R., Tounsi, A.: Effect of variable elastic foundations on static behavior of functionally graded plates using sinusoidal shear deformation. Arab. J. Geosci. (2019). https://doi.org/10.1007/S12517-019-4871-5
Merzoug, M., Bourada, M., Sekkal, M., Abir, A.C., Chahrazed, B., Benyoucef, S., Benachour, A.: 2D and quasi 3D computational models for thermoelastic bending of FG beams on variable elastic foundation: effect of the micromechanical models. Geomech. Eng. 22, 361–374 (2020). https://doi.org/10.12989/GAE.2020.22.4.361
Bouiadjra, R.B., Mahmoudi, A., Sekkal, M., Benyoucef, S., Selim, M.M., Tounsi, A., Hussain, M.: A quasi 3D solution for thermodynamic response of FG sandwich plates lying on variable elastic foundation with arbitrary boundary conditions. Steel Compos. Struct. 41, 873–886 (2021). https://doi.org/10.12989/SCS.2021.41.6.873
Benaberrahmane, I., Benyoucef, S., Sekkal, M., Mekerbi, M., Bouiadjra, R.B., Selim, M.M., Tounsi, A., Hussain, M.: Investigating of free vibration behavior of bidirectional FG beams resting on variable elastic foundation. Geomech. Eng. 25, 383–394 (2021). https://doi.org/10.12989/GAE.2021.25.5.383
Atmane, R.A., Mahmoudi, N., Bennai, R., Atmane, H.A., Tounsi, A.: Investigation on the dynamic response of porous FGM beams resting on variable foundation using a new higher order shear deformation theory. Steel Compos. Struct. 39, 95–107 (2021). https://doi.org/10.12989/SCS.2021.39.1.095
Giang, N.T., Hong, N.T.: Hygro-thermo-mechanical stability analysis of variable thickness functionally graded sandwich porous plates resting on variable elastic foundations using finite element method. J. Therm. Stress. 45, 641–668 (2022). https://doi.org/10.1080/01495739.2022.2089307
Wattanasakulpong, N., Ungbhakorn, V.: Linear and nonlinear vibration analysis of elastically restrained ends FGM beams with porosities. Aerosp. Sci. Technol. 32, 111–120 (2014). https://doi.org/10.1016/J.AST.2013.12.002
Rabia, B., Daouadji, T.H., Abderezak, R.: Effect of distribution shape of the porosity on the interfacial stresses of the FGM beam strengthened with FRP plate. Earthq. Struct. 16, 601–609 (2019). https://doi.org/10.12989/EAS.2019.16.5.601
Avcar, M., Hadji, L., Akan, R.: The influence of Winkler–Pasternak elastic foundations on the natural frequencies of imperfect functionally graded sandwich beams. Geomech. Eng. 31, 99–112 (2022). https://doi.org/10.12989/GAE.2022.31.1.099
Bennai, R., Atmane, R.A., Bernard, F., Nebab, M., Mahmoudi, N., Atmane, H.A., Aldosari, S.M., Tounsi, A.: Study on stability and free vibration behavior of porous FGM beams. Struct. Eng. Mech. 45, 67–82 (2022). https://doi.org/10.12989/SCS.2022.45.1.067
Pradhan, S.C., Murmu, T.: Thermo-mechanical vibration of FGM sandwich beam under variable elastic foundations using differential quadrature method. J. Sound Vib. 321, 342–362 (2009). https://doi.org/10.1016/J.JSV.2008.09.018
Sobhy, M.: Thermoelastic response of FGM plates with temperature-dependent properties resting on variable elastic foundations. Int. J. Appl. Mech. (2015). https://doi.org/10.1142/S1758825115500829
Beldjelili, Y., Tounsi, A., Mahmoud, S.R.: Hygro-thermo-mechanical bending of S-FGM plates resting on variable elastic foundations using a four-variable trigonometric plate theory. Smart Struct. Syst. 18, 755–786 (2016). https://doi.org/10.12989/SSS.2016.18.4.755
Attia, A., Bousahla, A.A., Tounsi, A., Mahmoud, S.R., Alwabli, A.S.: A refined four variable plate theory for thermoelastic analysis of FGM plates resting on variable elastic foundations. Struct. Eng. Mech. 65, 453–464 (2018). https://doi.org/10.12989/SEM.2018.65.4.453
Ayache, B., Bennai, R., Fahsi, B., Fourn, H., Atmane, H.A., Tounsi, A.: Analysis of wave propagation and free vibration of functionally graded porous material beam with a novel four variable refined theory. Earthq. Struct. 15, 369–382 (2018). https://doi.org/10.12989/EAS.2018.15.4.369
Touratier, M.: An efficient standard plate theory. Int. J. Eng. Sci. 29, 901–916 (1991). https://doi.org/10.1016/0020-7225(91)90165-Y
Nedri, K., El Meiche, N., Tounsi, A.: Free vibration analysis of laminated composite plates resting on elastic foundations by using a refined hyperbolic shear deformation theory. Mech. Compos. Mater. 49, 629–640 (2014). https://doi.org/10.1007/S11029-013-9379-6
Hadji, L., Avcar, M.: Nonlocal free vibration analysis of porous FG nanobeams using hyperbolic shear deformation beam theory. Adv. Nano Res. 10, 281–293 (2021). https://doi.org/10.12989/anr.2021.10.3.281
Hadji, L., Avcar, M.: Free vibration analysis of FG porous sandwich plates under various boundary conditions. J. Appl. Comput. Mech. 7, 505–519 (2021). https://doi.org/10.22055/jacm.2020.35328.2628
Sobhani, E., Avcar, M.: Natural frequency analysis of imperfect GNPRN conical shell, cylindrical shell, and annular plate structures resting on Winkler–Pasternak foundations under arbitrary boundary conditions. Eng. Anal. Bound. Elem. 144, 145–164 (2022). https://doi.org/10.1016/J.ENGANABOUND.2022.08.018
Nguyen, T.-K., Vo, T.P., Thai, H.-T.: Static and free vibration of axially loaded functionally graded beams based on the first-order shear deformation theory. Compos. Part B Eng. 55, 147–157 (2013). https://doi.org/10.1016/j.compositesb.2013.06.011
Ibnorachid, Z., Boutahar, L., EL Bikri, K., Benamar, R.: Buckling temperature and natural frequencies of thick porous functionally graded beams resting on elastic foundation in a thermal environment. Adv. Acoust. Vib. 2019, 1–17 (2019)
Şimşek, M.: Fundamental frequency analysis of functionally graded beams by using different higher-order beam theories. Nucl. Eng. Des. 240, 697–705 (2010). https://doi.org/10.1016/J.NUCENGDES.2009.12.013
Chen, W.Q., Lü, C.F., Bian, Z.G.: A mixed method for bending and free vibration of beams resting on a Pasternak elastic foundation. Appl. Math. Model. 28, 877–890 (2004). https://doi.org/10.1016/J.APM.2004.04.001
Fahsi, B., Bouiadjra, R.B., Mahmoudi, A., Benyoucef, S., Tounsi, A.: Assessing the effects of porosity on the bending, buckling, and vibrations of functionally graded beams resting on an elastic foundation by using a new refined quasi-3D theory. Mech. Compos. Mater. 55, 219–230 (2019). https://doi.org/10.1007/S11029-019-09805-0/FIGURES/5
Chikh, A.: Investigations in static response and free vibration of a functionally graded beam resting on elastic foundations. Frat. Integr. Strutt. 14, 115–126 (2020). https://doi.org/10.3221/IGF-ESIS.51.09
Vo, T.P., Thai, H.T., Nguyen, T.K., Maheri, A., Lee, J.: Finite element model for vibration and buckling of functionally graded sandwich beams based on a refined shear deformation theory. Eng. Struct. 64, 12–22 (2014). https://doi.org/10.1016/J.ENGSTRUCT.2014.01.029
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mellal, F., Bennai, R., Avcar, M. et al. On the vibration and buckling behaviors of porous FG beams resting on variable elastic foundation utilizing higher-order shear deformation theory. Acta Mech 234, 3955–3977 (2023). https://doi.org/10.1007/s00707-023-03603-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-023-03603-5