
Abstract
In this paper, a generalized memristor-based recurrent neural network model with variable delays and impulse effects is considered. By using an impulsive delayed differential inequality and Lyapunov function, the exponential stability of the impulsive delayed memristor-based recurrent neural networks is investigated. Several exponential and uniform stability criteria of this impulsive delayed system are derived, which promotes the study of memristor-based recurrent neural networks. Finally, the effectiveness of obtained results is illustrated by two numerical examples.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
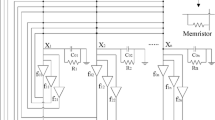
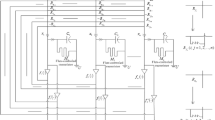
Constructing a neural network model to mimic the human brain is an important potential applications in the future. In the past decades, there were many researchers paying attention to the investigations of neural networks [1–5]. For example, the authors studied the properties of cellular neural networks in [1]. In [2, 3], the authors investigated the second-order dynamic consensus of multi-agent network systems. The authors discussed the linear programming problem of a recurrent neural networks in [4]. Hu and Wang [5] constructed a memristor-based neural network model with time delays by exploring a piecewise-linear mathematical model of the memristor to characterize its feature of pinched hysteresis. In these studies, the dynamical behaviors of neural networks are very important research fields. For instance, the authors investigated the attractivity of memristor-based delayed cellular neural networks in [6]. In [7], the authors studied the exponential stability of memristive neural networks. The consensus of multi-agent network systems has been investigated in [8–10].
Since the delayed neural networks may undergo abrupt changes arising from unexpected internal or external effects, it is necessary to study the dynamical behaviors of impulsive control neural networks. In [11–13], the synchronization problems of complex dynamical networks with delays were studied via impulsive distributed control. Recently, the stability of impulsive differential equations has been widely investigated [14–18]. For instance, in [14, 15], the stability of impulsive delayed neural networks was investigated by means of differential inequality. The authors in [16] studied the robust exponential stability of delayed neural networks with parameter uncertainties, stochastic perturbation, and impulses. Chen and Zhang [17] investigated the global exponential stability of impulsive neural networks with variable delay by means of an LMI approach. In [18], the authors studied the stability of high-order BAM neural networks with time delays and impulse effects. All these results are about the case of time-triggered impulse control. Event-triggered impulse control strategy [9, 19] may be considered in the future research.
Since the first physical memristor device was invented by Hewlett-Packard (HP) Laboratory [20, 21], memristor has attracted much attention [22–25] because it has the similar features just as the neurons in the human brain. Moreover, it may promote the development of the next-generation computer and powerful brain-like neural computers [24]. As a new neural network model, memristor-based neural network (MNN) systems have attracted much attention in recent years. Investigating the dynamic properties of MNNs is very important because it could play the key role in the designation of MNNs. Wu et al. [26] formulated the memristor-based neural networks and investigated their dynamical properties. In [27, 28], the authors studied the stability of memristor-based delayed recurrent neural networks. Zhang et al. researched the synchronization stability of chaotic memristive neural networks in [29]. As the literature indicates, the majority of these works focused on the stability analysis and synchronization of delayed MNNs without considering abrupt internal or external changes. However, the states of delayed MNNs (DMNNs) are not usually stable, and they could also undergo abrupt internal or external changes. Therefore, it is necessary to consider the impulsive effect on the stability of DMNNs. Recently, the stability problem of the memristive delayed neural networks with impulses was studied in [30]. In [31], the passivity and passification of stochastic impulsive memristive systems was investigated . Although there have been several dynamic study results of impulsive DMNNs, the stability analysis of these systems has not been fully investigated, which motivates the research of this paper.
In this paper, we formulate a generalized impulsive delayed memristor-based recurrent neural network (DMRNN) model and analyze the exponential stability of this model. The global exponential stability of DMRNNs with impulse effects is investigated by utilizing impulsive differential inequality and Lyapunov function. Several stability criteria are obtained, which implies that frequency and strength of impulses can maintain the stability of the original stable continuous delayed DMRNNs. Furthermore, it is worth noting that several uniformly stable criteria of the impulsive DMRNNs could also be derived. Two examples and their simulations are given to illustrate the effectiveness of the results.
The remaining part of this paper consists of four sections. In Sect. 2, models and preliminaries are introduced. And the main results are derived in Sect. 3. In Sect. 4, two illustrative examples are given to demonstrate the effectiveness of the proposed results. Finally, concluding remarks are included in Sect. 5.
2 Preliminaries
2.1 DMRNN model and notations
In recent years, some initial study results of the DMRNNs have been obtained [5, 26–28], where the DMRNN model can be described by the following differential equation:
where n denotes the number of units, \(u_{i}(t)\) corresponds to the state of the ith unit at time t, the time-varying delays \(\tau _{ij}(t)\) are nonnegative continuous functions satisfying \(0\le \tau _{ij}(t)\le \tau\) (\(\tau >0\) is a constant) for \(i,j=1,2,\ldots ,n,\) \(f_{j}(\cdot )\) and \(g_{j}(\cdot )\) are the bounded feedback functions satisfying \(f_{j}(0)=g_{j}(0)=0,\) \(I_{i}\) denotes external constant input, \(d_{i}(u_{i}(t)),\) \(a_{ij}(u_{i}(t))\) and \(b_{ij}(u_{i}(t))\) represent memristor-based weights, and
in which the switching jumps \(T_{i}>0,\) \(\hat{d}_{i}>0,\) \(\check{d}_{i}>0,\) \(\hat{a}_{ij},\) \(\check{a}_{ij},\) \(\hat{b}_{ij}\) and \(\check{b}_{ij}\) are constants for \(i,j=1,2,\ldots ,n.\) When \(|u_{i}(t)| = T_{i},\) \(d_{i}(u_{i}(t))\) is \(\check{d}_{i}\) or \(\hat{d}_{i},\) \(a_{ij}(u_{i}(t))\) is \(\check{a}_{ij}\) or \(\hat{a}_{ij},\) \(b_{ij}(u_{i}(t))\) is \(\check{b}_{ij}\) or \(\hat{b}_{ij}.\)
In this paper, solutions of all the considered systems are intended in the Filippov’s [32] sense. \({\varvec{R}}^{\varvec{n}}\) denotes the n-dimensional space with the Euclidean vector norm \(|\cdot |,\) and \([\cdot ,\cdot ]\) represents the interval. Let \(\overline{d}_{i}=\max \{\hat{d}_{i},\check{d}_{i}\},\) \(\underline{d}_{i}=\min \{\hat{d}_{i},\check{d}_{i}\},\) \(\overline{a}_{ij}=\max \{\hat{a}_{ij},\check{a}_{ij}\},\) \(\underline{a}_{ij}=\min \{\hat{a}_{ij},\check{a}_{ij}\},\) \(\overline{b}_{ij}=\max \{\hat{b}_{ij},\check{b}_{ij}\},\) \(\underline{b}_{ij}=\min \{\hat{b}_{ij},\check{b}_{ij}\},\) \(\tilde{d}_{i}=\min \{|\hat{d}_{i}|,|\check{d}_{i}|\},\) \(\tilde{a}_{ij}=\max \{|\hat{a}_{ij}|,|\check{a}_{ij}|\},\) \(\tilde{b}_{ij}=\max \{|\hat{b}_{ij}|,|\check{b}_{ij}|\},\) for \(i,j=1,2,\ldots ,n.\) \(co[\underline{a},\overline{a}]\) denotes closure of the convex hull generated by real numbers \(\underline{a}\) and \(\overline{a}\) or real matrices \(\underline{a}\) and \(\overline{a}.\)
2.2 Impulsive DMRNN model
In this subsection, basing on the references [5, 26–28], the impulsive DMRNN model can be described as the following differential inclusion by applying the theories of set-valued maps and differential inclusions [32]:
or equivalently, for \(i,j=1,2,\ldots ,n,\) there exist \(\breve{d}_{i}(t)\in co[\underline{d}_{i},\overline{d}_{i}],\) \(\breve{a}_{ij}(t)\in co[\underline{a}_{ij},\overline{a}_{ij}],\) \(\breve{b}_{ij}(t)\in co[\underline{b}_{ij},\overline{b}_{ij}],\) such that
where \(J_{ik}(u)\in {\mathcal {C}}[{\varvec{R}}^{\varvec{n}},{\varvec{R}}^{\varvec{n}}]\) is the jump operator at time \(t_{k},\) \(u(t_{k})=u(t_{k}^{+})=\lim _{h\rightarrow 0+}u(t_{k}+h),\) \(u(t_{k}^{-})=\lim _{h\rightarrow 0-}u(t_{k}+h),\) \(k=1,2,\ldots ,\) and \(0<t_{1}<t_{2}<\ldots <t_{k}<\cdots (t_{k}\rightarrow \infty\) as \(k\rightarrow \infty ),\) \(\phi (t)=(\phi _{1}(t),\phi _{2}(t), \dots ,\phi _{n}(t))^{T}\) and \(\phi (t)\in {\mathcal {PC}}([-\tau ,0],{\varvec{R}}^{\varvec{n}}),\) here \({\mathcal {PC}}([-\tau ,0],{\varvec{R}}^{\varvec{n}})\) denotes the set of piecewise right continuous function \(\phi (t):[-\tau ,0]\rightarrow {\varvec{R}}^{\varvec{n}}\) with the norm defined by \(||\phi (t)||_{\tau }=\sup _{-\tau \le s\le 0}|\phi (t+s)|.\) If \(J_{ik}(u_{i}(t_{k}^{-}))=u_{i}(t_{k}^{-}),\) then model (3) becomes model (1), which have been widely investigated in [26–29].
Suppose \(u^{*}=(u_{1}^{*},u_{2}^{*},\cdots ,u_{n}^{*})\) is an equilibrium point of the impulsive DMRNN (2) or (3), let \(x_{i}(t)=u_{i}(t)-u_{i}^{*}\) for \(i=1,2,\ldots ,n;\) then, we have
or equivalently,
where \(\varphi _{i}(t)=\phi _{i}(t)-u_{i}^{*},\) \(\tilde{f}_{j}(x_{j}(t))=f_{j}(x_{j}(t)+u_{j}^{*})-f_{j}(u_{j}^{*}),\) \(\tilde{g}_{j}(x_{j}(t))=g_{j}(x_{j}(t)+u_{j}^{*})-g_{j}(u_{j}^{*}),\) \(\mu _{ik}(x_{i}(t))=J_{ik}(x_{i}(t)+u_{i}^{*})-J_{ik}(u_{i}^{*}).\)
In order to derive the exponential stability criteria, the following definitions, assumptions, and lemmas are needed to be introduced.
Definition 1
([16]) The Dini’s upper right-hand derivative of a continuous function \(V(t):{\varvec{R}}\rightarrow {\varvec{R}}\) is defined by
Definition 2
([26, 28]) Let \(u^{*}=(u_{1}^{*},u_{2}^{*},\cdots ,u_{n}^{*})\) be an equilibrium point of system (2.3). If there exist constants \(\lambda >0\) and \(\beta \ge 1\) such that for every solution \(u(t)=(u_{1}(t),u_{2}(t),\cdots ,u_{n}(t))\) of system (2.3) with any initial value \(\phi (t)=(\phi _{1}(t),\phi _{2}(t),\dots ,\phi _{n}(t))^{T}\),
where \(||\phi (0)-u^{*}||_{\tau }=\sup _{-\tau \le s\le 0}|\phi (s)-u^{*}|,\) then the equilibrium point \(x^{*}\) is said to be globally exponentially stable.
Lemma 1
([14]) Let a, b be an constants with \(0<b<a\) and u(t) satisfy the following scalar impulsive differential inequality
where u(t) is continuous at \(t\ne t_{k},\) \(t\ge t_{0},\) \({\bar{u}(t)}\triangleq \sup _{t-\tau \le s\le t}\{u(s)\},\) \(u(t_{k}^{+})=u(t_{k})\) and \(u(t_{k}^{-})\) exists, \(\phi (t)\in {\mathcal {PC}}\) with \(n=1.\) Then,
where \(\delta _{k}=\max \{1,|\mu _{k}|\}\) and \(\lambda >0\) is a solution of the inequality \(\lambda -a+be^{\lambda \tau }\le 0.\)
Assumption 1
For \(j=1,2,\ldots ,n,\) the neuron activation functions \(f_{j}(u_{j})\) and \(g_{j}(u_{j})\) in (2) are bounded, and there exist nonnegative scalars \(\rho _{j}\) and \(\sigma _{j}\) such that, for \(\forall x_{1},x_{2}\in \varvec{R},\) \(x_{1}\ne x_{2},\)
Lemma 2
Under Assumption 1, we have
Assumption 2
For \(i=1,2,\ldots, n,\) the jump operator \(J_{ik}(u)\) satisfies the Lipschitz condition with \(J_{ik}(0)=0,\) i.e., there exists nonnegative scalar \(\mu _{ik}\) such that for \(\forall x_{1},x_{2}\in \varvec{R},\) \(x_{1}\ne x_{2},\)
3 Main results
In this section, the global exponential stability of the impulsive DMRNNs (2) or (3) will be investigated, and the stability criteria will be presented by the following theorems.
Theorem 1
Let \(u^{*}\) be the equilibrium point of impulsive DMRNN (2) or (3) and suppose Assumption 1 and Assumption 2 hold. Then, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable if for \(k\in Z^{+},\) the following conditions are satisfied.
-
(i) \(a>b,\) where \(a=\min _{1\le j\le n}\bigg (\tilde{d}_{j}-\max \bigg \{0,\tilde{a}_{jj}+\sum _{j\ne i,i=1}^{n}|\tilde{a}_{ij}|\bigg \}\rho _{j}\bigg )>0,\) \(b=\max _{1\le j\le n}(\sum _{i=1}^{n}|\tilde{b}_{ij}|\sigma _{j})\);
-
(ii) \(\lambda >\delta,\) where \(\lambda >0\) is a solution of \(\lambda -a+be^{\lambda \tau }\le 0,\) \(\delta =\sup _{k\in Z^{+}}\{\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\}\) with \(\delta _{k}=\max \{1,|\mu _{k}|\}\) and \(\mu _{k}=\max _{1\le i \le n}\{\mu _{ik}\}.\)
Proof
We only consider the exponential stability of the equilibrium point of impulsive DMRNN (4) or (5), which can guarantee the exponential stability of impulsive DMRNN (2) or (3).
Construct a Lyapunov function \(V(t)=\sum _{i=1}^{n}|x_{i}|,\) when \(t\ne t_{k},\) the Dini right derivative of V(t) can be calculated as follows:
where \(\bar{V}(t)=\sup _{t-\tau \le s\le t}\{V(s)\}.\)
When \(t= t_{k},\)
Employing Lemma 1, from (6), (7) and conditions (i) and (ii), we can get
Hence, we have
That is,
Since \(x_{i}(t)= u_{i}(t)-u^{\star },\) we have
for any \(t\ge 0.\) Therefore, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable. This completes the proof. \(\square\)
Remark 1
Let \(\lambda =\delta,\) the inequality (8) can be rewritten by \(\sum _{i=1}^{n}|u(t)-u^{\star }|\le \sup _{-\tau \le s\le 0}|\phi (s)-u^{\star }|.\) Then, we can conclude that the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is uniformly stable. Therefore, under the conditions of Theorem 1, the equilibrium point of system (2) or (3) is uniformly stable if \(\lambda \ge \delta .\) In this theorem, impulsive differential inequality was used to obtain the stability criteria, which is different with the techniques used in [10, 11]. Impulsive differential equations were used to study the consensus multi-agent networks in [10], and impulsive distributed control scheme was designed to achieve the network synchronization based on the concept of control topology in [11].
Theorem 2
Let \(u^{*}\) be the equilibrium point of impulsive DMRNN (2) or (3) and suppose Assumption 1 and Assumption 2 hold. Then, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable if for any \(k\in Z^{+},\) there exist \(\gamma _{j}>0, j=1,2,\dots ,n,\) such that the following conditions are satisfied.
-
(i) \(c>d,\) where \(c=\min _{1\le j\le n}(\tilde{d}_{j}-2 \sum _{i=1}^{n}\sum _{k=1}^{n}\frac{\gamma _{i}(\tilde{a}_{ik}\rho _{k})^{2}}{\tilde{d}_{i}\gamma _{j}})>0,\) \(d=\max _{1\le j\le n} \sum _{i=1}^{n} \sum _{k=1}^{n}\frac{2\gamma _{i}(\tilde{b}_{ik}\rho _{k})^{2}}{\tilde{d}_{i}\gamma _{j}}\) ;
-
(ii) \(\lambda >\delta,\) where \(\lambda >0\) is a solution of \(\lambda -c+de^{\lambda \tau }\le 0,\) \(\delta =\sup _{k\in Z^{+}}\{\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\}\) with \(\delta _{k}=\max \{1,|\mu _{k}|\}\) and \(\mu _{k}=\max _{1\le i \le n}\{\mu _{ik}\}.\)
Proof
In this theorem, we still consider the exponential stability of the equilibrium point of impulsive DMRNN (4) or (5), which can also guarantee the exponential stability of impulsive DMRNN (2) or (3).
Construct a Lyapunov function \(V(t)=\sum _{i=1}^{n}\frac{1}{2}\gamma _{i}x_{i}^{2}(t),\) when \(t\ne t_{k},\) the Dini right derivative of V(t) can be calculated as follows:
According to Lemma 2 and mean-value inequality, we have
Then, by Cauchy-Schwarz inequality, we obtain
As a result,
where \(\bar{V}(t)=\sup _{t-\tau \le s\le t}\{V(s)\}.\)
When \(t= t_{k},\)
Employing Lemma 1, from (9), (10) and conditions (i) and (ii), we can get
Hence, we have
Simultaneously,
Therefore,
where \(M=\frac{1}{\min _{1\le i\le n}\{\gamma _{i}\}}.\) Since \(x_{i}(t)= u_{i}(t)-u^{\star},\) we have
for any \(t\ge 0.\) Thus, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable. This completes the proof. \(\square\)
Remark 2
Let \(\lambda =\delta,\) the inequality (11) can be rewritten by \(\sum _{i=1}^{n}(u(t)-u^{\star })^{2}\le M\sup _{-\tau \le s\le 0}|\phi (s)-u^{\star }|.\) Then, we can conclude that the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is uniformly stable. Therefore, under the conditions of Theorem 2, the equilibrium point of system (2) or (3) is also uniformly stable if \(\lambda \ge \delta.\) Moreover, if \(\mu _{ik}(u)=u\) for any \(i,k\in Z^{+}\) in the system (2) or (35), then we can obtain new stable criteria of delayed memristor-based recurrent neural networks (DMRNNs) without impulsive effects from Theorem 1 and 2.
Remark 3
The two theories are about the stability criteria of impulsive delayed memristor-based recurrent neural networks. By means of impulsive differential inequality and some assumptions, several important stability conditions have been obtained, which is different with some published results. In [26–29], the authors mainly studied the dynamic behaviors of DMRNNs without impulsive effects. The authors only discussed the dynamic behaviors of classical impulsive complex networks and neural networks instead of memristor-based neural networks in [10–18]. In this paper, both memristor-based recurrent neural networks and impulsive effects are combined to be investigated, which enriches the research results of neural networks.
In Theorem 2, if different numerical numbers of \(\gamma _{i}\) are chosen, we can obtain several important results. For example, let \(\gamma _{i}=1\) for any \(i=1,2,\ldots, n;\) then, we can get the following corollary.
Corollary 1
Let \(u^{*}\) be the equilibrium point of impulsive DMRNN (2) or (3) and suppose Assumption 1 and Assumption 2 hold. Then, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable if for any \(k\in Z^{+},\) the following conditions are satisfied.
-
(i) \(\min _{1\le j\le n}(\tilde{d}_{j}-2 \sum _{i=1}^{n}\sum _{k=1}^{n}\frac{(\tilde{a}_{ik}\rho _{k})^{2}}{\tilde{d}_{i}})-\max _{1\le j\le n} \sum _{i=1}^{n}\sum _{k=1}^{n}\frac{2(\tilde{b}_{ik}\rho _{k})^{2}}{\tilde{d}_{i}}>0\);
-
(ii) \(\lambda >\delta,\) where \(\lambda >0\) is a solution of \(\lambda -c+de^{\lambda \tau }\le 0,\) \(\delta =\sup _{k\in Z^{+}}\{\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\}\) with \(\delta _{k}=\max \{1,|\mu _{k}|\}\) and \(\mu _{k}=\max _{1\le i \le n}\{\mu _{ik}\}.\)
If let \(\sum _{j=1}^{n}\gamma _{i}|\tilde{a}_{ij}|=1,\) the following corollary can be obtained.
Corollary 2
Let \(u^{*}\) be the equilibrium point of impulsive DMRNN (2) or (3) and suppose Assumption 1 and Assumption 2 hold. Then, the equilibrium point \(u^{*}\) of impulsive DMRNN (2) or (3) is globally exponentially stable if for any \(k\in Z^{+},\) the following conditions are satisfied.
-
(i) \(\min _{1\le i\le n}(\tilde{d}_{i}-2 \sum _{j=1}^{n}\frac{|\tilde{a}_{ij}|\rho _{k}^{2}}{\tilde{d}_{j}\gamma _{i}})-\max _{1\le i\le n}\sum _{j=1}^{n} \sum _{k=1}^{n}\frac{2(\tilde{b}_{jk}\rho _{k})^{2}\gamma _{j}}{\tilde{d}_{j}\gamma _{i}}>0\);
-
(ii) \(\lambda >\delta ,\) where \(\lambda >0\) is a solution of \(\lambda -c+de^{\lambda \tau }\le 0,\) \(\delta =\sup _{k\in Z^{+}}\{\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\}\) with \(\delta _{k}=\max \{1,|\mu _{k}|\}\) and \(\mu _{k}=\max _{1\le i \le n}\{\mu _{ik}\}.\)
Remark 4
In this two corollaries, if let \(\mu _{ik}(u)=u\) for any \(i,k\in Z^{+},\) we can obtain the Theorems 1 and 2 of [28], which only considered the exponential stability of DMRNNs without impulse effects. In this sense, we push on the research of the DMRNNs. Furthermore, in these theories and corollaries, we could choose \(|\mu _{ik}|>1\) or \(|\mu _{ik}|\le 1\) for any \(i,k\in Z^{+}.\) As we know, when \(|\mu _{ik}|>1,\) Lyapunov function may jump out of the state trajectories of DMRNNs (2) or (3) at impulsive points \(t_{k}(k\in Z^{+}).\) Thus, the impulse effects may potentially destroy the stability of the original continuous DMRNNs (1). However, from these theories and corollaries, we can obtain that sufficient conditions concerned with the proper frequency and strength of impulses can maintain the stability of the original continuous stable DMRNNs.
4 Illustrative examples
Two numerical examples will be presented to illustrate the effectiveness of the above results in this section.
Example 1
Consider the following two-dimensional impulsive memristor-based recurrent neural networks with time-varying delays
where \(i=1,2,\) \(f_{i}(x)=g_{i}(x)=1/2(|x+1|-|x-1|),\) \(\tau _{11}(t)=\tau _{12}(t)=\tau _{21}(t)=\tau _{22}(t)=1-0.6\sin (t),\) \(\tau =1\) and

Time–response curves without impulsive effects

Time–response curves with impulsive effects \(P_{ik}>1\)

Time–response curves with different impulsive effects \(P_{ik}>1\)
In terms of the parameters defined in Theorem 1, we can obtain \(a=3>b=2,\) and the solution of \(\lambda -a+be^{\lambda \tau }=0\) is \(\lambda \approx 0.3001.\) Let \(t_{k}-t_{k-1}=0.35,\) \(P_{ik}=\delta _{k}=1.1\) for any \(i=1,2,\ldots ,n\) and \(k=1,2,\ldots,\) we can get \(\delta =\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\le 0.2725\le \lambda \approx 0.3001.\) Therefore, the equilibrium point \((0,0)^{T}\) of impulsive DMRNN (12) is globally exponentially stable, which is shown by Fig. 2. If let \(t_{k}-t_{k-1}=0.7,\) \(P_{ik}=-1.23\) for any \(i=1,2,\ldots ,n\) and \(k=1,2,\ldots ,\) we can get \(\delta =\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\le 0.2960\le \lambda \approx 0.3001\) according to the conditions (ii) and (iii) of Theorem 1. Then, the equilibrium point \((0,0)^{T}\) of impulsive DMRNN (12) is also globally exponentially stable. The simulations are shown in Fig. 3.
Remark 5
From Fig. 1, it can be seen that the equilibrium point \((0,0)^{T}\) of DMRNN (12) without impulse effects is globally exponentially stable. As we all know, if let \(\delta _{k}>1,\) impulsive disturbances may potentially destroy the neural network stability. However, from Figs. 2 and 3, it can be seen that sufficient conditions concerned with the magnitude and frequency of impulses can maintain the exponential stability of DMRNN (12).
Example 2
In impulsive DMRNNs (12), let \(f_{i}(x)=g_{i}(x)=\tanh (x),\) \(\tau _{11}(t)=\tau _{21}(t)=1-0.6\cos (t), \tau _{12}(t)=\tau _{22}(t)=1+0.6\sin (t)\) and
In terms of the parameters defined in Theorem 2, we can obtain \(c=0.7082>d=0.3856,\) and the solution of \(\lambda -c+de^{\lambda \tau }=0\) is \(\lambda \approx 0.1683.\) Let \(t_{k}-t_{k-1}=0.35,\) \(P_{ik}=\delta _{k}=1.05\) for any \(i=1,2,\ldots ,n\) and \(k=1,2,\ldots,\) we can get \(\delta =\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\le 0.1395\le \lambda \approx 0.1683.\) Therefore, the equilibrium point \((0,0)^{T}\) of impulsive DMRNN (12) is globally exponentially stable, which is shown by Fig. 5. If let \(t_{k}-t_{k-1}=0.7,\) \(P_{ik}=1.12\) for any \(i=1,2,\ldots ,n\) and \(k=1,2,\ldots,\) we can get \(\delta =\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\le 0.1620\le \lambda \approx 0.1683\) according to the conditions (ii) and (iii) of Theorem 2. Then, the equilibrium point \((0,0)^{T}\) of impulsive DMRNN (12) is also globally exponentially stable. The simulations are shown in Fig. 6. On the other hand, if let \(t_{k}-t_{k-1}=0.7,\) \(P_{ik}=2.12\) for any \(i=1,2,\ldots ,n\) and \(k=1,2,\ldots,\) we can get \(\delta =\frac{\ln \delta _{k}}{t_{k}-t_{k-1}}\approx 1.0735>\lambda \approx 0.1683,\) which shows that the conditions of Theorem 2 are not satisfied. The simulation results are shown in Fig. 7.

Time–response curves without impulsive effects

Time–response curves with impulsive effects \(P_{ik}>1\)

Time–response curves with different impulsive effects \(P_{ik}>1\)

Time–response curves with improper impulses \(P_{ik}>1\)
Remark 6
We can see that the equilibrium point \((0,0)^{T}\) of DMRNN (12) without impulse effects is globally exponentially stable in Fig. 4. From Figs. 5 and 6, it can be seen that the exponential stability of DMRNN (12) depends on the values of \(t_{k}-t_{k-1}\) and \(P_{ik}.\) And the values of \(t_{k}-t_{k-1}\) are directly proportional to that of \(P_{ik},\) which shows that the proper magnitude and frequency of impulses can maintain the exponential stability of DMRNN (12).
Remark 7
When the impulsive jump operators \(\delta _{k}>1,\) the stable neural network could be potentially destroyed by impulsive disturbances, which is shown in from Fig. 7. In this case, some conditions are needed to give to maintain the stability. From Figs. 2, 3, 5, and 6, it can be seen that sufficient conditions concerned with the magnitude and frequency of impulses can maintain the stability of DMRNN, which illustrates that the conditions of this paper are effective.
5 Conclusions
In this paper, impulse effects have been exerted on the delayed memristor-based recurrent neural networks (DMRNNs), and a generalized impulsive DMRNN model has been introduced. Based on the published works of impulsive system and DMRNNs, the global exponential stability of the impulsive DMRNNs has been investigated. By means of impulsive differential inequality and Lyapunov function, several novel exponential stabilization criteria of this system have been obtained. Furthermore, it can be found that the uniformly stable criteria have also been derived by weakening the condition of Theorem 1 and 2. Finally, two numerical examples have been given to illustrate the effectiveness of the presented results, which shows that frequency and strength of impulses could stabilize the original DMRNNs. In the future, the concept of control topology and event-triggered impulse control strategy could be used to design impulsive control scheme to study the stability and synchronization of DMRNNs.
References
Itoh M, Chua L (2009) Memristor cellular automata and memristor discrete-time cellular neural networks. Int J Bifurcat Chaos 19(11):3605–3656
Li H, Liao X, Lei X, Huang T, Zhu W (2013) Second-order consensus seeking in multi-agent systems with nonlinear dynamics over random switching directed networks. IEEE Trans. Circuits Syst I Regul Pap 60(6):1595–1607
Li H, Liao X, Huang T (2013) Second-order locally dynamic consensus of multiagent systems with arbitrarily fast switching directed topologies. IEEE Trans Syst Man Cybern 43(6):1343–1353
He X, Li C, Huang T, Li C, Huang J (2014) A recurrent neural network for solving bilevel linear programming problem. IEEE Trans Neural Netw Learn Syst 25:824–830
Hu J, Wang J (2010) Global uniform asymptotic stability of memristorbased recurrent neural networks with time delays. In: Proceedings of IEEE international joint conference neural network Barcelona, Spain, pp 2127–2134
Guo Z, Wang J, Yan Z (2014) Attractivity analysis of memristor-based cellular neural networks with time-varying delays. IEEE Trans Neural Netw Learn Syst 25(4):704–717
Wen S, Zeng Z, Huang T, Chen Y, Li P (2015) Circuit design and exponential stabilization of memristive neural networks. Neural Netw 63:48–56
Li H, Liao X, Huang T, Zhu W, Liu Y (2015) Second-order globally consensus in multiagent networks with random directional link failure. IEEE Trans Neural Netw Learn Syst 26(3):565–575
Li H, Liao X, Huang T, Zhu W (2015) Event-triggering sampling based leader-following consensus in second-order multi-agent systems. IEEE Trans Automat Contr 60(7):1998–2003
Liu Z, Guan Z, Shen X, Feng G (2012) Consensus of multi-agent networks with aperiodic sampled communication via impulsive algorithm using position-only measurements. IEEE Trans Automat Contr 57(10):2639–2643
Guan Z, Liu Z, Feng G, Wang Y (2010) Synchronization of complex dynamical networks with time-varying delays via impulsive distributed control. IEEE Trans Circuits Syst I 57(8):2182–2195
Li C, Gao D, Liu C, Chen G (2014) Impulsive control for synchronizing delayed discrete complex networks with switching topology. Neural Comput Appl 24(1):59–68
Li C, Yu W, Huang T (2014) Impulsive synchronization schemes of stochastic complex networks with switching topology: Average time approach. Neural Netw 54:85–94
Yang Z, Xu D (2005) Stability analysis of delay neural networks with impulsive effects. IEEE Trans Circuits Syst II 52(8):517–521
Yang Z, Xu D (2007) Stability analysis and design of impulsive control systems with time delay. IEEE Trans Automat Contr 52(8):1448–1454
Huang T, Li C, Duan S, Starzyk J (2012) Robust exponential stability of uncertain delayed neural networks with stochastic perturbation and impulse effects. IEEE Trans Neural Netw Learn Syst 23(6):866–875
Chen W, Zheng W (2009) Global exponential stability of impulsive neural networks with variable: an LMI approach. IEEE Trans Circuits Syst I 56(6):1248–1259
Li C, Li C, Liao X, Huang T (2011) Impulsive effects on stability of high-order BAM neural networks with time delays. Neurocomputing 74(10):1541–1550
Li H, Liao X, Chen G, Hill D, Dong Z, Huang T (2015) Event-triggered asynchronous intermittent communication strategy for synchronization in complex networks. Neural Netw 66:1–10
Strukov D, Snider G, Stewart D, Williams R (2008) The missing memristor found. Nature 453:80–83
Chua L (1971) Memristor-the missing circuit element. IEEE Trans Circuit Theory 18(5):507–519
Corinto F, Ascoli A, Gilli M (2011) Nonlinear dynamics of memristor oscillators. IEEE Trans Circuits Syst I Reg Pap 58(6):1323–1336
Wen S, Zeng Z, Huang T, Yu X (2014) Noise cancellation of memristive neural networks. Neural Netw 60:74–83
Pershin Y, Ventra M (2012) Experimental demonstration of associative memory with memristive neural networks. Neural Netw 23:881–886
Wen S, Zeng Z, Huang T, Zhang Y (2014) Exponential lag adaptive synchronization of memristive neural networks and applications in Pseudo-random generators. IEEE Trans Fuzzy Syst 22(6):1704–1713
Wu A, Zeng Z (2012) Exponential stabilization of memristive neural networks with time delays. IEEE Trans Neural Netw Learn Syst 23(12):1919–1929
Wen S, Zeng Z, Huang T (2013) Dynamic behaviors of memristor-based delayed recurrent networks. Neural Comput Appl 23(3–4):815–821
Zhang G, Shen Y, Quan Y, Sun J (2012) Global exponential stability of a class of memristor-based recurrent neural networks with time-varying delays. Neurocomputing 97:149–154
Zhang G, Shen Y (2013) New algebraic criteria for synchronization stability of chaotic memristive neural networks with time-varying delays. IEEE Trans Neural Netw Learn Syst 24(10):1919–1929
Qi J, Li C, Huang T (2014) Stability of delayed memristive neural networks with time-varying impulses. Cogn Neurodyn 8:429–436
Wen S, Zeng Z, Huang T, Li C (2015) Passivity and passification of stochastic impulsive memristor-based piecewise linear system with mixed delays. Int J Robust Nonlinear Contr 25(4):610–624
Filippov A (1988) Differential equations with discontinuous right-hand sides. Kluwer, Dordrecht
Acknowledgments
The work was supported by Program for New Century Excellent Talents in University (Grant No. [2013]47), National Natural Science Foundation of China (Grant Nos. 61372139, 61374078, 61503175, 61571372, 61101233, 60972155), Spring Sunshine Plan Research Project of Ministry of Education of China (Grant No. z2011148), Fundamental Research Funds for the Central Universities (Grant Nos. XDJK2014A009, XDJK2016A001), Program for Excellent Talents in scientific and technological activities for Overseas Scholars, Ministry of Personnel in China (Grant No. 2012-186), University Excellent Talents Supporting Foundations in of Chongqing (Grant No. 2011-65), University Key Teacher Supporting Foundations of Chongqing (Grant No. 2011-65). High School Key Scientific Research Project of Henan Province (Grant No. 15A120013), NPRP grant ♯ NPRP 4-1162-1-181, from the Qatar National Research Fund (a member of Qatar Foundation).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, H., Duan, S., Li, C. et al. Exponential stability analysis of delayed memristor-based recurrent neural networks with impulse effects. Neural Comput & Applic 28, 669–678 (2017). https://doi.org/10.1007/s00521-015-2094-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-015-2094-6