
Abstract
The space–time fluid–structure interaction (STFSI) methods for 3D parachute modeling are now at a level where they can bring reliable, practical analysis to some of the most complex parachute systems, such as spacecraft parachutes. The methods include the Deforming-Spatial-Domain/Stabilized ST method as the core computational technology, and a good number of special FSI methods targeting parachutes. Evaluating the stability characteristics of a parachute based on how the aerodynamic moment varies as a function of the angle of attack is one of the practical analyses that reliable parachute FSI modeling can deliver. We describe the special FSI methods we developed for this specific purpose and present the aerodynamic-moment data obtained from FSI modeling of NASA Orion spacecraft parachutes and Japan Aerospace Exploration Agency (JAXA) subscale parachutes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Especially with the advances of the last decade, the space–time fluid–structure interaction (STFSI) methods for 3D parachute modeling can now bring reliable, practical analysis to some of the most complex parachute systems, such as spacecraft parachutes (see [1–3] and references therein, and [4–8]). The computational challenges encountered in FSI modeling of spacecraft parachutes and successfully addressed with the STFSI methods include (i) FSI with a structure that is light compared to the air masses involved in the parachute dynamics, (ii) design complexities such as the geometric porosity created by the hundreds of gaps and slits of a spacecraft parachute and the modified geometric porosity of the “windows” created by the removal of panels, and (iii) usage complexities such as the contact between the parachutes used in clusters for large payloads and the “reefed” stages and “disreefing” of the parachutes used in multiple stages. The methods include the Deforming-Spatial-Domain/Stabilized ST (DSD/SST) method [9–12] and its new versions [13–16] as the core FSI technology, and a large set of special FSI techniques targeting parachutes (see [1–3] and references therein, and [4–8]).
While methods based on the the Arbitrary Lagrangian–Eulerian (ALE) finite element formulation [17] have been the most common in FSI modeling in general (see, for example, [2, 18–56]), the STFSI methods have clearly been dominant in FSI modeling of complex parachute systems (see [1–3] and references therein, and [4–8]). We also note that there are other classes of problems where computations based on the DSD/SST method have been very successful, and formidable computational challenges were addressed with the special methods targeting those classes of problems. Examples, with the cited references reporting recent computations, are cardiovascular fluid mechanics [3, 16, 57–66], flapping-wing aerodynamics [3, 16, 62, 67–70], and wind-turbine aerodynamics [3, 16, 33, 71, 72].
Special FSI methods targeting the Orion spacecraft parachutes started in [73, 74] and continued in [1, 4–8, 75–79]. These special FSI methods, together with the core FSI method, brought for the first time accurate solution and analysis to ringsail spacecraft parachutes at full scale, clusters of those parachutes, their reefed stages and disreefing, and versions with modified geometric porosity. For example, in the latest design of the main parachutes, Sail 11 is removed for every 5th gore to create windows, and approximately the top 25 % of Sail 6 is removed for all the gores to create wider gaps. A gore is the slice of the parachute canopy between two radial reinforcement cables running from the parachute vent to the skirt (see [1, 2, 73, 74] for other parachute terminology, including “sail” and “gap”). We use the acronym “MP” to identify the parachute with such modified geometric porosity. The core and special STFSI methods enabled reliable aerodynamic-performance analysis of single MP parachutes and clusters of MP parachutes [3, 4, 6–8]. Other spacecraft parachute analyses enabled by the core and special STFSI methods include those related to (i) earlier designs of modified geometric porosity [1, 76], (ii) vent hoop [1, 77], (iii) suspension line length [1, 3, 79], (iv) canopy loading [79], (v) overinflation control line [79], (vi) dynamics of parachute interactions in a cluster [1, 3, 4, 6, 77, 78], (vii) forward bay cover separation [5], (viii) disreefing [3, 4, 7, 8], (ix) drogue parachute [7, 8], and (x) gore curvature [8].
Evaluating the stability characteristics of a spacecraft parachute based on how the aerodynamic moment varies as a function of the angle of attack is another practical analysis that reliable parachute FSI modeling can deliver, and that is what we focus on in this paper. The special FSI methods used include the axial- and planar-symmetric FSI methods. These methods were designed to inhibit nonsymmetric deformation modes and unintended gliding. The axial-symmetric FSI method was introduced in [75] to build a good starting condition for parachute FSI computations. The method, which was called “symmetric FSI” method when it was introduced and used with the same name many times since then, has been very helpful in building a starting condition free of any nonsymmetric deformation or unintended gliding. The axial-symmetric FSI method was also used in an analysis reported in [80] to have some idea about the stability characteristics of a single, earlier-design Orion spacecraft main parachute. The method enabled the computation of the aerodynamic moment at different values of the angle of attack, without introducing any nonsymmetric deformation or any gliding not intended with the specified value of the angle of attack. The axial-symmetric FSI method is not applicable to a 2-parachute cluster, which we also consider for stability analysis. For that case, we use the planar-symmetric FSI method, which we introduce in this paper. With the core and special STFSI methods, we compute the aerodynamic-moment data based on FSI modeling of a single MP parachute, a 2-parachute MP cluster, and two models of a single Japan Aerospace Exploration Agency (JAXA) subscale parachute.
Methods and problem setup for the MP parachutes are described in Sect. 2. The symmetrization methods are described in Sect. 3. Computations and aerodynamic-moment data for the MP parachutes are reported in Sect. 4. Methods and problem setup for the JAXA subscale parachutes are described in Sect. 5. Computations and aerodynamic-moment data for the JAXA subscale parachutes are reported in Sect. 6, and the concluding remarks are given in Sect. 7.
2 MP parachute
2.1 Problem setup
We study the trend of the moment coefficient (\(C_\mathrm{M}\)) as a function of angle of attack (\(\alpha \)) to assess the stability characteristics of a single MP parachute and a 2-parachute (2P) MP cluster. We define \(C_\mathrm{M}\) as
where \(M_\mathrm{P}\) is the moment about the payload, with a negative value leading to a decrease in \(\alpha \). The nominal area, \(S_\mathrm{o}\), is approximately 10,500 \(\mathrm{ft}^{2}\) for each parachute, \(\bar{c}\) is approximately 120 ft, and \(q_\mathrm{tot}\) = \(\frac{1}{2} \rho {U}^{2}\), where \(U\) is the magnitude of the instantaneous payload velocity.
All computations are carried out using air properties at standard sea-level conditions. The density is \(2.38\times 10^{-3}\text {slug}/\text {ft}^{3}\) and the kinematic viscosity is \(1.57\times 10^{-4}\,\text {ft}^{2}/\text {s}\). The material properties for all parachute cables and fabrics were obtained from NASA.
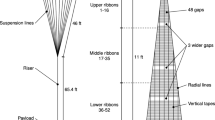
The parachute model is the same as the MP parachute model in [4]. It is a 120-ft ringsail parachute with 4 rings and 9 sails. It is missing panels on every 5th gore on Sail 11 as well as the top 25 % of Sail 6. It has a suspension-line to nominal diameter ratio of \(L_{\text {s}}/D_{\text {o}}=1.44\). The payload mass is about 6,900 lbs for the single parachute, and 20,000 lbs for the 2P cluster. Figure 1 shows the MP parachute.

MP parachute
2.2 Computational methods and parameters
2.2.1 Meshes
The structure and fluid-interface meshes are shown in Fig. 2. The structural mechanics and fluid-interface meshes for the 2P cluster are generated by combining two single MP parachute meshes with an angle of \(15^{\circ }\) between the two parachute axes. The number of nodes and elements for those meshes are given in Table 1. The starting shape comes from the inflated MP parachute shape reported in [4]. The fluid mechanics volume mesh consists of four-node tetrahedral elements, and the membrane elements used in the parachute structure are quadrilateral. The computational domain is box-shaped, with dimensions 1,740 ft \(\times \) 1,740 ft \(\times \) 1,566 ft. The data for the fluid mechanics volume meshes is in Table 2.

MP parachute structural mechanics mesh (top) and fluid-interface mesh (bottom). For the number of nodes and elements in these meshes, see Table 1
The reference frame moves with a vertical velocity of \(U_\mathrm{v}\) and a horizontal velocity of \(U_\mathrm{h}\), and the mesh translates vertically with the average displacement rate of the structure beyond \(U_\mathrm{v}\). Here, \(U_\mathrm{v}\) is 25.7 ft/s for a single parachute, and 32.5 ft/s for the 2P cluster. We set \(U_\mathrm{h}\) as \(U_\mathrm{h}=U_\mathrm{v} \tan \alpha \) to achieve a target \(\alpha \).
2.2.2 Fluid mechanics computations
The fluid mechanics computations with fixed shapes and positions are done in two parts. In the first part we use the semi-discrete formulation given in [12]. We compute 1,000 time steps with a time-step size of 0.232 s and 6 nonlinear iterations per time step. The number of GMRES iterations per nonlinear iteration is 90. There is no porosity model in this part.
In the second part we use the DSD/SST-TIP1 technique [13], with the SUPG test function option WTSA (see Remark 2 in [13]). The stabilization parameters used are those given in [13] by Eqs. (9)–(12), (14)–(15) and (17), with the \(\tau _{{\mathrm {SUGN2}}}\) term dropped from Eq. (14). We compute 300 time steps with a time-step size of 0.0232 s, 6 nonlinear iterations per time step, and 90 GMRES iterations per nonlinear iteration. The porosity model is HMGP-FGR [4].
2.2.3 FSI computations
The fully-discretized, coupled fluid and structural mechanics and mesh-moving equations are solved with the quasi-direct coupling technique (see Sect. 5.2 in [13]). We use the SSTFSI-TIP1 technique (see Remarks 5 and 10 in [13]), with the same SUPG test function option and stabilization parameters as those described in Sect. 2.2.2. For the structual mechanics time integration we use the generalized-\(\alpha \) method [81]. The parameters we use with the method, in the notation of [2], are \(\alpha _\mathrm{m} = 1,\,\alpha _\mathrm{f} = 1,\,\gamma = 0.9\), and \(\beta = 0.49\). We use the SSP method [73] as the interface projection technique.
The time-step size is 0.0232 s, with 6 nonlinear iterations per time step. The number of GMRES iterations per nonlinear iteration is 120 for the fluid+structure block, and 30 for the mesh-moving block. We use selective scaling (see [13]), with the scale for the structure part set to 10 and for the other parts set to 1.
3 Symmetrization methods
To inhibit nonsymmetric deformation modes and unintended gliding, we use symmetric FSI techniques. We symmetrize the pressure difference extracted from the fluid before we pass that to the structure. This enables the computation of \(C_\mathrm{M}\) at different values of \(\alpha \), without introducing any nonsymmetric deformation or any gliding not intended with the specified value of \(\alpha \). For the single MP parachute, we use the axial-symmetric FSI method, which is the original symmetric FSI method [75]. In this method, we symmetrize the pressure difference passed to the structure for each meridional ring of the parachute.
For the 2P cluster, we introduce here a new method that we call planar-symmetric FSI. In this method, we symmetrize the pressure difference passed to the structure with respect to two planes (see Fig. 3). The first plane is defined with three points: the centroid of each parachute canopy and the payload. The second plane is perpendicular to the line connecting the two parachute centroids and passes through the payload. The flow is parallel to the second plane. In implementing the symmetrization with respect to the two planes, we identify sets of 4 nodes that are mirrored across the two planes (see Fig. 3) and average the pressure difference among the 4 nodes. In addition, we do a similar two-plane symmetrization for the structural displacement rate every 150 time steps.

Planar-symmetric FSI method node set
4 MP parachute computations
4.1 Single MP parachute
Using the starting shape for a single MP parachute found in [4], we develop the flow field in the fluid mechanics computations for 10 different target values of \(\alpha \) ranging from \(0^\circ \) to \(30^\circ \). The inflow velocity for each case is calculated using the technique in Sect. 2.2.1. With results from these computations as starting conditions, we compute the 10 cases with the axial-symmetric FSI method.
We compute each case to determine \(C_\mathrm{M}\) over a duration of about 80 s. In calculating the time-averaged values of \(C_\mathrm{M}\) at different values of \(\alpha \), we take only the last 60 s. Since the parachute descent speed is not constrained, the actual, instantaneous \(\alpha \) changes a little. The instantaneous \(\alpha \) is measured as the angle between the inflow velocity and the parachute riser. We use the same period of 60 s to calculate the time-averaged \(\alpha \). Figure 4 shows the flow field at \(\alpha =30^\circ \) during the axial-symmetric FSI computation.

Single MP parachute at \(\alpha =30^\circ \). The velocity vectors are colored by their magnitude. (Color figure online)
4.2 2P MP cluster
After calculating \(U_\mathrm{h}\) for 7 different target values of \(\alpha \), we again develop the flow field in fluid mechanics computations. We then compute each case in planar-symmetric FSI as discussed in Sect. 3. The duration of each computation is about 30 s. To calculate the time-averaged values of \(C_\mathrm{M}\) and \(\alpha \), we use the last 20 s. Figure 5 shows the flow field at \(\alpha =30^\circ \) during the planar-symmetric FSI computation.

2P MP cluster at \(\alpha =30^\circ \). The velocity vectors are colored by their magnitude. (Color figure online)
4.3 Results
We show the time history of \(C_\mathrm{M}\) for the single MP parachute in Fig. 6. The highlighted regions are the ranges of time used in calculating the time-averaged values. Figure 7 shows the time history of the instantaneous \(\alpha \) for these cases. Figure 8 shows the time-averaged \(C_\mathrm{M}\) as a function of \(\alpha \). The vertical bars represent the standard deviation of our data.

Single MP parachute instantaneous \(C_\mathrm{M}\)

Single MP parachute instantaneous \(\alpha \)

Single MP parachute time-averaged \(C_\mathrm{M}\)
Remark 1
For the single MP parachute, for values of \(\alpha \) different than zero, the moment axis is perpendicular to the plane formed by the riser axis and the inflow velocity vector passing through the payload. For \(\alpha = 0\), however, there is no naturally defined moment axis, and the direction of the moment calculated is random. The initial direction is determined randomly at the beginning, and that direction, or directions close to that, might stay as the preferred direction for long periods of time. Therefore, in Fig. 6, for \(\alpha = 0\), we plot the magnitude of the moment vector in the horizontal plane. Because we know that in a directionally-averaged sense \(C_\mathrm{M}\) will be zero for \(\alpha = 0\), in Fig. 8, we use \(C_\mathrm{M} = 0\) at \(\alpha \) = 0. For that case, the vertical bar represents the standard deviation from \(C_\mathrm{M} = 0\).
Figure 8 shows that the parachute has a stable trim point at about \(17.3^\circ \). By definition, where the curve has a negative slope at \(C_\mathrm{M}=0\), it has positive static stability. The payload descent speed for these cases can be seen in Fig. 9.

Single MP parachute payload descent speed
We show the time history of \(C_\mathrm{M}\) for the 2P MP cluster in Fig. 10. Figure 11 shows the time histories of the instantaneous \(\alpha \) for these cases. For the 2P MP cluster, the time-averaged \(C_\mathrm{M}\) as a function of \(\alpha \) can be seen in Fig. 12. Figure 13 shows the payload descent speed for these cases.

2P MP cluster instantaneous \(C_\mathrm{M}\)

2P MP cluster instantaneous \(\alpha \)

2P MP cluster time-averaged \(C_\mathrm{M}\)

2P MP cluster payload descent speed
Remark 2
For the 2P MP cluster, at \(\alpha = 0\), the axis parallel to the line connecting the two parachute centroids and passing through the payload can be seen as a naturally defined moment axis. Still, in Fig. 10, we plot the magnitude of the moment vector in the horizontal plane. This is less consequential, because \(C_\mathrm{M}\) at \(\alpha = 0\) is close to zero.
5 JAXA subscale parachute
5.1 Problem setup
Here we study the \(C_\mathrm{M}\) trends for two models of a single JAXA subscale parachute. The two models, Model A and Model B, which are used in the wind tunnel tests, have a diameter of 0.73 m and 1.46 m, respectively. They have 3 rings and 6 sails, missing panels on every 5th gore on Sail 8 as well as the top 50 % of Sail 4, and \(L_{\text {s}}/D_{\text {o}}=1.54\). Besides being smaller than the MP parachute, these models have half as many gores, namely 40, the payload point is pinned, just like how it is in a wind tunnel, and the vertical component of the air speed is constant at 18.0 m/s. The only difference between the two models is the size. The material properties for the cables and fabrics were obtained from JAXA. Figure 14 shows the JAXA subscale parachute. The computations are carried out with air properties at standard sea-level conditions. The density is 1.205 \(\text {kg}/\text {m}^{3}\) and the kinematic viscosity is \(1.461\times 10^{-5}\,\text {m}^{2}/\text {s}\).

JAXA subscale parachute
5.2 Computational methods and parameters
5.2.1 Meshes
The structure and fluid-interface meshes are shown in Fig. 15, with the number of nodes and elements given in Table 3. The meshes for Model A and Model B are the same. The starting shape comes from the JAXA parachute shape reported in [82]. The fluid mechanics volume mesh consists of four-node tetrahedral elements, and the membrane elements used in the parachute structure are quadrilateral. The computational domain is box-shaped, with dimensions 11.68 m \(\times \) 11.68 m \(\times \) 10.95 m for Model A, and twice as large for model B. The data for the fluid mechanics volume mesh is in Table 4.

JAXA subscale parachute structural mechanics mesh (top) and fluid-interface mesh (bottom). For the number of nodes and elements, see Table 3
5.2.2 Fluid mechanics computations
The fluid mechanics computations with fixed shapes are based on the DSD/SST-TIP1 method, with the same SUPG test function option and stabilization parameters as in Sect. 2.2.2. We compute 400 time steps with a time-step size of \(2.028\times 10^{-4}\) s, 6 nonlinear iterations per time step, and 180 GMRES iterations per nonlinear iteration. The porosity model is HMGP-FGR [4].
5.2.3 FSI computations
The methods used in the FSI computations are the same as in Sect. 2.2.3. The time-step size is \(1.014\times 10^{-4}\,\text {s}\) for Model A and \(2.028\times 10^{-4}\,\text {s}\) for Model B, with 6 nonlinear iterations per time step. The number of GMRES iterations per nonlinear iteration for the fluid+structure block depends on the model and the target \(\alpha \) and will be given in Sect. 6. The number of GMRES iterations per nonlinear iteration for the mesh-moving block is 30. We use selective scaling, with the scale for the structure part set to 1,000 and for the other parts set to 1.
6 JAXA subscale parachute computations
Using the starting shape reported in [82] for the JAXA parachute, we develop the flow field in the fluid mechanics computations for 6 different target values of \(\alpha \) ranging from \(0^\circ \) to \(30^\circ \). The vertical component of the inflow velocity in each case is constant at 18.0 m/s. With results from these computations as starting conditions, we compute the 6 cases with the axial-symmetric FSI method. The number GMRES iterations per nonlinear iteration is 210 for Model A at \(\alpha =18^\circ ,\;24^\circ ,\;30^\circ \) and Model B at \(\alpha =24^\circ \), and 180 for all other cases.
We compute each case to determine \(C_\mathrm{M}\) over a duration of 0.4 s for Model A and 0.8 s for Model B, based on their breathing period. In calculating the time-averaged values of \(C_\mathrm{M}\) at different values of \(\alpha \), we take only the last 62.5 % of that duration. We note that because the payload point is fixed, the instantaneous \(\alpha \) does not change and is the same as the target \(\alpha \). Figure 16 shows the flow field at \(\alpha =30^\circ \) during the axial-symmetric FSI computation with Model A.

JAXA subscale parachute at \(\alpha =30^\circ \). The velocity vectors are colored by their magnitude. (Color figure online)
We show the time history of \(C_\mathrm{M}\) for the two models in Figs. 17 and 18. Again, the highlighted regions are the ranges of time used in calculating the time-averaged values.

JAXA subscale parachute Model A instantaneous \(C_\mathrm{M}\)

JAXA subscale parachute Model B instantaneous \(C_\mathrm{M}\)
Remark 3
For the JAXA subscale parachute also, at \(\alpha = 0\) there is no naturally defined moment axis. In Figs. 17 and 18, we plot the moment around the same axis as the one used for values of \(\alpha \) different than zero. Again, this is less consequential, because \(C_\mathrm{M}\) at \(\alpha \) = 0 is close to zero.
We believe the reason behind the high-frequency fluctuations seen in Figs. 17 and 18 is that the time-step size, determined by the Courant number requirements of the fluid mechanics part, is not as suitable for the structural mechanics part in the subscale-parachute computations as it was in the MP parachute computations. Figures 19 and 20 show for the two models the time-averaged \(C_\mathrm{M}\) as a function of \(\alpha \), with the vertical bars representing, as before, the standard deviation of our data.

JAXA subscale parachute Model A time-averaged \(C_\mathrm{M}\)

JAXA subscale parachute Model B time-averaged \(C_\mathrm{M}\)
7 Concluding remarks
We have described the special FSI methods we developed for evaluating the stability characteristics of a parachute based on how \(C_\mathrm{M}\) varies with \(\alpha \) and presented the \(C_\mathrm{M}\) data obtained from 3D FSI modeling of NASA Orion spacecraft parachutes and JAXA subscale parachutes. The methods include the DSD/SST method as the core computational technology, and a good number of special FSI methods targeting parachutes, including the special FSI methods described in the paper. The special FSI methods we focused on in the paper are the axial- and planar-symmetric FSI methods, which enable the computation of \(C_\mathrm{M}\) at different values of \(\alpha \), without introducing any nonsymmetric deformation or any gliding not intended with the specified value of \(\alpha \). We have presented the \(C_\mathrm{M}\) data based on FSI modeling of a single MP parachute, a 2-parachute MP cluster, and two models of a single JAXA subscale parachute. With this work, we have given another example of the core and special STFSI methods for 3D parachute modeling bringing reliable, practical analysis to some of the most complex parachute systems, such as spacecraft parachutes.
References
Takizawa K, Tezduyar TE (2012) Computational methods for parachute fluid-structure interactions. Arch Comput Methods Eng 19:125–169. doi:10.1007/s11831-012-9070-4
Bazilevs Y, Takizawa K, Tezduyar TE (2013) Computational fluid-structure interaction: methods and applications. Wiley, New York, ISBN 978-0470978771
Takizawa K, Bazilevs Y, Tezduyar TE, Hsu M-C, Øiseth O, Mathisen KM, Kostov N, McIntyre S (2014) Engineering analysis and design with ALE-VMS and space-time methods. Arch Comput Methods Eng. published online, May 2014. doi:10.1007/s11831-014-9113-0
Takizawa K, Fritze M, Montes D, Spielman T, Tezduyar TE (2012) Fluid-structure interaction modeling of ringsail parachutes with disreefing and modified geometric porosity. Comput Mech 50:835–854. doi:10.1007/s00466-012-0761-3
Takizawa K, Montes D, Fritze M, McIntyre S, Boben J, Tezduyar TE (2013) Methods for FSI modeling of spacecraft parachute dynamics and cover separation. Math Models Methods Appl Sci 23:307–338. doi:10.1142/S0218202513400058
Takizawa K, Tezduyar TE, Boben J, Kostov N, Boswell C, Buscher A (2013) Fluid-structure interaction modeling of clusters of spacecraft parachutes with modified geometric porosity. Comput Mech 52:1351–1364. doi:10.1007/s00466-013-0880-5
Takizawa K, Tezduyar TE, Boswell C, Kolesar R, Montel K (2014) FSI modeling of the reefed stages and disreefing of the Orion spacecraft parachutes. Comput Mech 54:1203–1220. doi:10.1007/s00466-014-1052-y
Takizawa K, Tezduyar TE, Kolesar R, Boswell C, Kanai T, Montel K (2014) Multiscale methods for gore curvature calculations from FSI modeling of spacecraft parachutes. Comput Mech. published online, 2014. doi:10.1007/s00466-014-1069-2
Tezduyar TE (1992) Stabilized finite element formulations for incompressible flow computations. Adv Appl Mech 28:1–44. doi:10.1016/S0065-2156(08)70153-4
Tezduyar TE, Behr M, Liou J (1992) A new strategy for finite element computations involving moving boundaries and interfaces—the deforming-spatial-domain/space-time procedure: I. The concept and the preliminary numerical tests. Comput Methods Appl Mech Eng 94:339–351. doi:10.1016/0045-7825(92)90059-S
Tezduyar TE, Behr M, Mittal S, Liou J (1992) A new strategy for finite element computations involving moving boundaries and interfaces—the deforming-spatial-domain/space-time procedure: II. Computation of free-surface flows, two-liquid flows, and flows with drifting cylinders. Comput Methods Appl Mech Eng 94:353–371. doi:10.1016/0045-7825(92)90060-W
Tezduyar TE (2003) Computation of moving boundaries and interfaces and stabilization parameters. Int J Numer Methods Fluids 43:555–575. doi:10.1002/fld.505
Tezduyar TE, Sathe S (2007) Modeling of fluid–structure interactions with the space–time finite elements: solution techniques. Int J Numer Methods Fluids 54:855–900. doi:10.1002/fld.1430
Takizawa K, Tezduyar TE (2011) Multiscale space–time fluid–structure interaction techniques. Comput Mech 48:247–267. doi:10.1007/s00466-011-0571-z
Takizawa K, Tezduyar TE (2012) Space–time fluid–structure interaction methods. Math Models Methods Appl Sci 22:1230001. doi:10.1142/S0218202512300013
Takizawa K (2014) Computational engineering analysis with the new-generation space–time methods. Comput Mech 54:193–211. doi:10.1007/s00466-014-0999-z
Hughes TJR, Liu WK, Zimmermann TK (1981) Lagrangian–Eulerian finite element formulation for incompressible viscous flows. Comput Methods Appl Mech Eng 29:329–349
Ohayon R (2001) Reduced symmetric models for modal analysis of internal structural-acoustic and hydroelastic-sloshing systems. Comput Methods Appl Mech Eng 190:3009–3019
van Brummelen EH, de Borst R (2005) On the nonnormality of subiteration for a fluid–structure interaction problem. SIAM J Sci Comput 27:599–621
Bazilevs Y, Calo VM, Zhang Y, Hughes TJR (2006) Isogeometric fluid–structure interaction analysis with applications to arterial blood flow. Comput Mech 38:310–322
Khurram RA, Masud A (2006) A multiscale/stabilized formulation of the incompressible Navier–Stokes equations for moving boundary flows and fluid–structure interaction. Comput Mech 38:403–416
Bazilevs Y, Calo VM, Hughes TJR, Zhang Y (2008) Isogeometric fluid–structure interaction: theory, algorithms, and computations. Comput Mech 43:3–37
Dettmer WG, Peric D (2008) On the coupling between fluid flow and mesh motion in the modelling of fluid–structure interaction. Comput Mech 43:81–90
Bazilevs Y, Gohean JR, Hughes TJR, Moser RD, Zhang Y (2009) Patient-specific isogeometric fluid–structure interaction analysis of thoracic aortic blood flow due to implantation of the Jarvik 2000 left ventricular assist device. Comput Methods Appl Mech Eng 198:3534–3550
Bazilevs Y, Hsu M-C, Benson D, Sankaran S, Marsden A (2009) Computational fluid–structure interaction: methods and application to a total cavopulmonary connection. Comput Mech 45:77–89
Bazilevs Y, Hsu M-C, Zhang Y, Wang W, Liang X, Kvamsdal T, Brekken R, Isaksen J (2010) A fully-coupled fluid–structure interaction simulation of cerebral aneurysms. Comput Mech 46:3–16
Bazilevs Y, Hsu M-C, Zhang Y, Wang W, Kvamsdal T, Hentschel S, Isaksen J (2010) Computational fluid–structure interaction: methods and application to cerebral aneurysms. Biomech Model Mechanobiol 9:481–498
Bazilevs Y, Hsu M-C, Akkerman I, Wright S, Takizawa K, Henicke B, Spielman T, Tezduyar TE (2011) 3D simulation of wind turbine rotors at full scale. Part I: geometry modeling and aerodynamics. Int J Numer Methods Fluids 65:207–235. doi:10.1002/fld.2400
Bazilevs Y, Hsu M-C, Kiendl J, Wüchner R, Bletzinger K-U (2011) 3D simulation of wind turbine rotors at full scale. Part II: fluid–structure interaction modeling with composite blades. Int J Numer Methods Fluids 65:236–253
Akkerman I, Bazilevs Y, Kees CE, Farthing MW (2011) Isogeometric analysis of free-surface flow. J Comput Phys 230:4137–4152
Hsu M-C, Bazilevs Y (2011) Blood vessel tissue prestress modeling for vascular fluid–structure interaction simulations. Finite Element Anal Design 47:593–599
Nagaoka S, Nakabayashi Y, Yagawa G, Kim YJ (2011) Accurate fluid–structure interaction computations using elements without mid-side nodes. Comput Mech 48:269–276. doi:10.1007/s00466-011-0620-7
Bazilevs Y, Hsu M-C, Takizawa K, Tezduyar TE (2012) ALE-VMS and ST-VMS methods for computer modeling of wind-turbine rotor aerodynamics and fluid–structure interaction. Math Models Methods Appl Sci 22:1230002. doi:10.1142/S0218202512300025
Akkerman I, Bazilevs Y, Benson DJ, Farthing MW, Kees CE (2012) Free-surface flow and fluid-object interaction modeling with emphasis on ship hydrodynamics. J Appl Mech 79:010905
Bazilevs Y, Hsu M-C, Scott MA (2012) Isogeometric fluid–structure interaction analysis with emphasis on non-matching discretizations, and with application to wind turbines. Comput Methods Appl Mech Eng 249–252:28–41
Hsu M-C, Akkerman I, Bazilevs Y (2012) Wind turbine aerodynamics using ALE-VMS: validation and role of weakly enforced boundary conditions. Comput Mech 50:499–511
Hsu M-C, Bazilevs Y (2012) Fluid-structure interaction modeling of wind turbines: simulating the full machine. Comput Mech 50:821–833
Akkerman I, Dunaway J, Kvandal J, Spinks J, Bazilevs Y (2012) Toward free-surface modeling of planing vessels: simulation of the Fridsma hull using ALE-VMS. Comput Mech 50:719–727
Minami S, Kawai H, Yoshimura S (2012) Parallel BDD-based monolithic approach for acoustic fluid–structure interaction. Comput Mech 50:707–718
Miras T, Schotte J-S, Ohayon R (2012) Energy approach for static and linearized dynamic studies of elastic structures containing incompressible liquids with capillarity: a theoretical formulation. Comput Mech 50:729–741
van Opstal TM, van Brummelen EH, de Borst R, Lewis MR (2012) A finite-element/boundary-element method for large-displacement fluid–structure interaction. Comput Mech 50:779–788
Yao JY, Liu GR, Narmoneva DA, Hinton RB, Zhang Z-Q (2012) Immersed smoothed finite element method for fluid–structure interaction simulation of aortic valves. Comput Mech 50:789–804
Larese A, Rossi R, Onate E, Idelsohn SR (2012) A coupled PFEM-Eulerian approach for the solution of porous FSI problems. Comput Mech 50:805–819
Bazilevs Y, Takizawa K, Tezduyar TE (2013) Challenges and directions in computational fluid–structure interaction. Math Models Methods Appl Sci 23:215–221. doi:10.1142/S0218202513400010
Bazilevs Y, Hsu M-C, Bement MT (2013) Adjoint-based control of fluid–structure interaction for computational steering applications. Procedia Comput Sci 18:1989–1998
Korobenko A, Hsu M-C, Akkerman I, Tippmann J, Bazilevs Y (2013) Structural mechanics modeling and FSI simulation of wind turbines. Math Models Methods Appl Sci 23:249–272
Korobenko A, Hsu M-C, Akkerman I, Bazilevs Y (2013) Aerodynamic simulation of vertical-axis wind turbines. J Appl Mech 81:021011. doi:10.1115/1.4024415
Bazilevs Y, Korobenko A, Deng X, Yan J, Kinzel M, Dabiri JO (2014) FSI modeling of vertical-axis wind turbines. J Appl Mech 81:081006. doi:10.1115/1.4027466
Yao JY, Liu GR, Qian D, Chen CL, Xu GX (2013) A moving-mesh gradient smoothing method for compressible CFD problems. Math Models Methods Appl Sci 23:273–305
Kamran K, Rossi R, Onate E, Idelsohn SR (2013) A compressible Lagrangian framework for modeling the fluid–structure interaction in the underwater implosion of an aluminum cylinder. Math Models Methods Appl Sci 23:339–367
Hsu M-C, Akkerman I, Bazilevs Y (2014) Finite element simulation of wind turbine aerodynamics: validation study using NREL phase VI experiment. Wind Energy 17:461–481
Long CC, Marsden AL, Bazilevs Y (2013) Fluid–structure interaction simulation of pulsatile ventricular assist devices. Comput Mech 52:971–981. doi:10.1007/s00466-013-0858-3
Long CC, Esmaily-Moghadam M, Marsden AL, Bazilevs Y (2014) Computation of residence time in the simulation of pulsatile ventricular assist devices. Comput Mech 54:911–919. doi:10.1007/s00466-013-0931-y
Yao J, Liu GR (2014) A matrix-form GSM-CFD solver for incompressible fluids and its application to hemodynamics. Comput Mech 54:999–1012. doi:10.1007/s00466-014-0990-8
Long CC, Marsden AL, Bazilevs Y (2014) Shape optimization of pulsatile ventricular assist devices using FSI to minimize thrombotic risk. Comput Mech 54:921–932. doi:10.1007/s00466-013-0967-z
Hsu M-C, Kamensky D, Bazilevs Y, Sacks MS, Hughes TJR (2014) Fluid-structure interaction analysis of bioprosthetic heart valves: significance of arterial wall deformation. Comput Mech 54:1055–1071. doi:10.1007/s00466-014-1059-4
Takizawa K, Brummer T, Tezduyar TE, Chen PR (2012) A comparative study based on patient-specific fluid–structure interaction modeling of cerebral aneurysms. J Appl Mech 79:010908. doi:10.1115/1.4005071
Takizawa K, Bazilevs Y, Tezduyar TE (2012) Space–time and ALE-VMS techniques for patient-specific cardiovascular fluid–structure interaction modeling. Arch Comput Methods Eng 19:171–225. doi:10.1007/s11831-012-9071-3
Takizawa K, Schjodt K, Puntel A, Kostov N, Tezduyar TE (2012) Patient-specific computer modeling of blood flow in cerebral arteries with aneurysm and stent. Comput Mech 50:675–686. doi:10.1007/s00466-012-0760-4
Takizawa K, Schjodt K, Puntel A, Kostov N, Tezduyar TE (2013) Patient-specific computational analysis of the influence of a stent on the unsteady flow in cerebral aneurysms. Comput Mech 51:1061–1073. doi:10.1007/s00466-012-0790-y
Takizawa K, Takagi H, Tezduyar TE, Torii R (2014) Estimation of element-based zero-stress state for arterial FSI computations. Comput Mech 54:895–910. doi:10.1007/s00466-013-0919-7
Takizawa K, Tezduyar TE, Buscher A, Asada S (2014) Space–time interface-tracking with topology change (ST-TC). Comput Mech 54:955–971. doi:10.1007/s00466-013-0935-7
Takizawa K, Bazilevs Y, Tezduyar TE, Long CC, Marsden AL, Schjodt K (2014) ST and ALE-VMS methods for patient-specific cardiovascular fluid mechanics modeling. Math Models Methods Appl Sci 24:2437–2486. doi:10.1142/S0218202514500250
Suito H, Takizawa K, Huynh VQH, Sze D, Ueda T (2014) FSI analysis of the blood flow and geometrical characteristics in the thoracic aorta. Comput Mech 54:1035–1045. doi:10.1007/s00466-014-1017-1
Takizawa K, Tezduyar TE, Buscher A, Asada S (2014) Space–time fluid mechanics computation of heart valve models. Comput Mech 54:973–986. doi:10.1007/s00466-014-1046-9
Takizawa K, Torii R, Takagi H, Tezduyar TE, Xu XY (2014) Coronary arterial dynamics computation with medical-image-based time-dependent anatomical models and element-based zero-stress state estimates. Comput Mech 54:1047–1053. doi:10.1007/s00466-014-1049-6
Takizawa K, Henicke B, Puntel A, Spielman T, Tezduyar TE (2012) Space–time computational techniques for the aerodynamics of flapping wings. J Appl Mech 79:010903. doi:10.1115/1.4005073
Takizawa K, Henicke B, Puntel A, Kostov N, Tezduyar TE (2012) Space–time techniques for computational aerodynamics modeling of flapping wings of an actual locust. Comput Mech 50:743–760. doi:10.1007/s00466-012-0759-x
Takizawa K, Kostov N, Puntel A, Henicke B, Tezduyar TE (2012) Space–time computational analysis of bio-inspired flapping-wing aerodynamics of a micro aerial vehicle. Comput Mech 50:761–778. doi:10.1007/s00466-012-0758-y
Takizawa K, Tezduyar TE, Kostov N (2014) Sequentially-coupled space–time FSI analysis of bio-inspired flapping-wing aerodynamics of an MAV. Comput Mech 54:213–233. doi:10.1007/s00466-014-0980-x
Takizawa K, Tezduyar TE, McIntyre S, Kostov N, Kolesar R, Habluetzel C (2014) Space–time VMS computation of wind-turbine rotor and tower aerodynamics. Comput Mech 53:1–15. doi:10.1007/s00466-013-0888-x
Bazilevs Y, Takizawa K, Tezduyar TE, Hsu M-C, Kostov N, McIntyre S (2014) Aerodynamic and FSI analysis of wind turbines with the ALE-VMS and ST-VMS methods. Arch Comput Methods Eng. published online, May 2014. doi:10.1007/s11831-014-9119-7
Tezduyar TE, Sathe S, Pausewang J, Schwaab M, Christopher J, Crabtree J (2008) Interface projection techniques for fluid–structure interaction modeling with moving-mesh methods. Comput Mech 43:39–49. doi:10.1007/s00466-008-0261-7
Tezduyar TE, Sathe S, Schwaab M, Pausewang J, Christopher J, Crabtree J (2008) Fluid–structure interaction modeling of ringsail parachutes. Comput Mech 43:133–142. doi:10.1007/s00466-008-0260-8
Tezduyar TE, Takizawa K, Moorman C, Wright S, Christopher J (2010) Space–time finite element computation of complex fluid–structure interactions. Int J Numer Methods Fluids 64:1201–1218. doi:10.1002/fld.2221
Takizawa K, Moorman C, Wright S, Spielman T, Tezduyar TE (2011) Fluid–structure interaction modeling and performance analysis of the Orion spacecraft parachutes. Int J Numer Methods Fluids 65:271–285. doi:10.1002/fld.2348
Takizawa K, Wright S, Moorman C, Tezduyar TE (2011) Fluid–structure interaction modeling of parachute clusters. Int J Numer Methods Fluids 65:286–307. doi:10.1002/fld.2359
Takizawa K, Spielman T, Tezduyar TE (2011) Space–time FSI modeling and dynamical analysis of spacecraft parachutes and parachute clusters. Comput Mech 48:345–364. doi:10.1007/s00466-011-0590-9
Takizawa K, Spielman T, Moorman C, Tezduyar TE (2012) Fluid–structure interaction modeling of spacecraft parachutes for simulation-based design. J Appl Mech 79:010907. doi:10.1115/1.4005070
Moorman CJ (2010) Fluid–structure interaction modeling of the Orion Spacecraft parachutes. Master’s thesis, Rice University
Chung J, Hulbert GM (1993) A time integration algorithm for structural dynamics with improved numerical dissipation: the generalized-\(\alpha \) method. J Appl Mech 60:371–375
Boben JJ (2013) Fluid–structure interaction modeling of modified-porosity parachutes and parachute clusters. Master’s thesis, Rice University
Acknowledgments
This work was supported in part by NASA Johnson Space Center grant NNX13AD87G. It was also supported in part by the Rice–Waseda research agreement (first author).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Takizawa, K., Tezduyar, T.E., Boswell, C. et al. Special methods for aerodynamic-moment calculations from parachute FSI modeling. Comput Mech 55, 1059–1069 (2015). https://doi.org/10.1007/s00466-014-1074-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-014-1074-5