
Abstract
Objective
The aim of the study is to describe techniques of robot-assisted parenchymal-sparing liver surgery.
Background
Laparoscopy provides the same oncologic outcomes as open liver resection and better early outcome. Limitations of laparoscopy remain resections in posterior and superior liver segments, frequently approached with laparoscopic right hepatectomy, bleeding from the section line, and prolonged operative times when a combined procedure is needed.
Methods
We retrospectively analyzed our series of robot-assisted liver resections between 2008 and September 2010 to evaluate whether robot assistance can overcome the limitations of laparoscopy.
Results
A total of 23 patients underwent robot-assisted liver resection for a total of 21 subsegmentectomies, 6 segmentectomies, 2 segmentectomies S6 + subsegmentectomies S7, 1 bisegmentectomy S2–3, and 2 pericystectomies. In ten cases (47.8%) liver nodules were located in the posterior and superior liver segments. In three cases the tumor was in contact with a main portal branch and in two cases with a hepatic vein. In one case the tumor had contact with both hepatic vein and portal branch. In the latter cases a no-margin resection was carried out. In 16 cases (65.5%) liver resection was associated with a concomitant procedure (10 laparoscopic colectomies, 1 robotic rectal resection, 3 laparoscopic radiofrequency ablations, and 2 extensive adhesiolyses). Mean operative time was 280 ± 101 min, blood loss was 245 ± 254 ml, and mean hospital stay was 8.9 ± 9.4 days. Mortality was nil. One case of biliary leakage and two of intraoperative hemorrhage requiring transfusion were the main complications encountered.
Conclusions
Robot assistance allows optimal access to all liver segments and facilitates parenchymal-sparing surgery also for lesions located in the posterosuperior segments or in contact with main liver vessels.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Laparoscopic hepatic resections (LHR) are considered to be as safe as open hepatic resection (OHR). Clear margins can be maintained, and the reduced postoperative pain as well as the early recovery allow better patient tolerance for repeated operations and early access to adjuvant chemotherapy [1].
Nevertheless, it is difficult to reproduce laparoscopically elementary maneuvers of open surgery, i.e., intermittent pedicle clamping, knots, and sutures, making hemorrhage control and bile duct reconstruction demanding [2].
Wide use of high-energy devices and staplers has replaced traditional use of pedicle clamping and Kelly clamp crushing technique to obtain a bloodless section line, and hand assistance is used for the preponderance of major resections [3–5].
Moreover, resection of liver masses located in the posterior and superior segments (1, 4a, 7, 8), requiring curved or angulated section lines, is made demanding by rigid laparoscopic tools, leading to a great number of straight section-line major hepatectomies even for small or isolated liver nodules [6].
These facts are in contrast with the current trend toward parenchymal-sparing surgery for both colorectal liver metastases (CLRM) and hepatocellular carcinoma (HCC), impairing the advantages of minimally invasive liver resection [7, 8].
The use of endowristed instruments could be valuable to carry out parenchymal-sparing surgery and to reproduce basic skills of hepatic surgery in the laparoscopic setting. Our series of robot-assisted LHR was reviewed to address this issue. Operative outcome and technical considerations of robot-assisted LHR were examined to verify whether the da Vinci robotic system (Intuitive Surgical Inc., Sunnyvale, CA) could support laparoscopic parenchymal-sparing liver surgery.
Materials and methods
From January 2008 to September 2010, all patients undergoing robot-assisted LHR were prospectively followed up and their data maintained in a dedicated database. The series comprises patients referred to our institution with a diagnosis of CLRM and HCC, nonendocrine noncolorectal liver matastases (NENCLM), hydatid cysts, and giant liver hemangioma. Even though the two latter pathologies have different behavior from malignant liver lesions, their optimal treatment can be considered a parenchymal-sparing procedure (total pericystectomy and enucleation, respectively) and they were thus included in the study [9, 10].
In case of synchronous CLRM, simultaneous resection was favored, and cases described in our previous paper were included also in this study [11].
The terminology for liver anatomy and resection is based on the Brisbane classification [12].
Operative time was calculated as the time between pneumoperitoneum induction and closure of skin incisions, including the robot setup time. The scrub nurse typically dresses the robot when pneumoperitoneum is going to be established or when a simultaneous procedure (i.e., laparoscopic colectomy, cholecystectomy, adhesiolysis) and laparoscopic ultrasonographic liver exploration are nearly concluded. Therefore, time for robot docking is superimposed with other phases of the operation.
Intraoperative blood loss was calculated as the difference between instilled and aspirated fluids.
Prior consent was obtained, and full treatment options where submitted to all patients treated. Data collected were retrospectively analyzed.
Inclusion criteria
Preoperative work-up included whole-body contrast-enhanced computed tomography (CT) and liver gadoxetic acid-enhanced magnetic resonance imaging (MRI), tumor markers, and routine blood examination. During multidisciplinary meetings, each patient was evaluated for technical feasibility of liver resection and feasibility of a minimally invasive approach.
Technical feasibility was established if residual liver volume (RLV) with optimal blood inflow and outflow and biliary drainage was expected to be sufficient. RLV was considered sufficient if it represented 35% of the whole liver volume in case of normal liver, or 50% of the whole liver volume in the presence of cirrhotic liver classified as Child–Pugh class A.
A minimally invasive approach was indicated if the largest liver CLRM had maximum diameter of 5–6 cm and when the number and location of the lesions would have not excessively prolonged the operating time (more than four lesions located in four noncontiguous liver segments). Only single HCC less than 6 cm in diameter was approached laparoscopically.
The choice between traditional and robot-assisted operation was based on the complexity of the planned liver resection.
Traditional laparoscopy was used when liver lesions were single, small, subcapsular, and located in segments 2, 3, 4b, and 5.
Robot-assisted approach was preferred for larger and deep lesions, and for resections encompassing two or more liver segments, portal triad dissection, selective clamping, and tumor location in the posterolateral segments.
Technique
During the study period, nonanatomical resection and anatomical segmentectomy were the preferred strategy for treatment of CLRM and HCC, respectively. In both groups of patients, when the tumor was in close contact with a major liver vessel, the operative strategy was defined at the laparoscopic intraoperative ultrasonography (LIOUS), according to the criteria of Torzilli et al. [13]. If the portal branch or the hepatic vein was separated by a thin layer of liver parenchyma from the lesion or was in contact with the lesion without vessel wall discontinuation, with contact <1/3 of the vessel diameter, the vessel was spared and limited resection with no margin was performed [13, 14]. In all other conditions, vessel resection was carried out.
Patient and trocar position
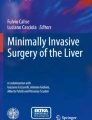
A central line is inserted prior to surgery to monitor the central venous pressure, which is maintained at 4–5 cm H2O during liver transection. The patient is placed in supine position for lesions in the left lobe and in segment 5, and the robot is docked over the patient’s head. After pneumoperitoneum induction at 12 mmHg by means of the Verres needle, a camera port is inserted at the level of the umbilicus. Two 8-mm Intuitive trocars are placed along the left and right midclavicular line, five fingerbreadths from the umbilicus. Two accessory trocars are placed along the left and right mammillary line below the robotic trocars (Fig. 1, panel 1). For lesions in segment 4a, trocars are positioned with the same disposition but more cranially (Fig. 1, panel 2).

Trocar sites for robot-assisted liver resections. c camera port, r robotic trocar, a accessory trocar. Panel 1: trocar disposition in a case of left colon cancer with synchronous liver metastases in segments 3 and 1. One accessory trocar was inserted in the right iliac fossa to carry out the simultaneous left colectomy. Panel 2: trocar disposition in a patient with a recurrent liver mass in segment 4b. Camera and robotic trocar have the same disposition as in panel 1 except for the higher position. Two accessory trocars were needed to complete an extensive laparoscopic adhesiolysis. Panel 3: patient and robot position for a lesion in segment 7. Panel 4: trocar disposition in a patient with a liver mass in segment 7. The right robotic trocar is inserted along the scapular line between the 10th and 11th rib. The brown line is the costal margin
For lesions in segments 6–8, the patient is rotated on the left flank to facilitate liver mobilization and inferior vena cava dissection.
The camera port and the left robotic trocars are placed at the level of the right costal margin, whereas the right robotic trocar is inserted in the intercostal space between the 10th and 11th rib along the scapular line. At this level the risk of accidentally injury to lung is very low and direct access to the posterolateral segments is provided, as previously shown by Gumbs and Gayet [15].
Two accessory trocars can be placed along the midline and the anterior axillary line (Fig. 1, panel 4).
Pringle maneuver
The device for inflow occlusion is composed of a 20-Fr chest tube, an umbilical tape, and a plug used for occlusion of the Foley catheter (Fig. 2, panel 1).

Pringle maneuver. Panel 1: tools for robot-assisted extracorporeal Pringle maneuver. Panel 2: trocar position and tourniquet in place (with arrow) for a lesion in segment 7. Panel 3: intracorporeal view of the tourniquet. Panel 4: trocar disposition for resection of segment 7. u umbilical port, t tourniquet. To encircle the liver pedicle and set up the tourniquet, port site 4 is used to insert the camera and trocar 3 and “u” for the two operative robotic arms. For liver resection the camera is switched to port 2 with the two robotic arms in 1 and 3; 4 and “u” are used as accessory trocars
The chest tube is inserted in the epigastric region. The umbilical tape is passed around the hepatoduodenal ligament with the use of an endowristed Cadiere forceps (Intuitive Surgical Inc., Sunnyvale, CA). Fine movements of the 30° camera allow direct visualization of the Winslow foramen during the whole procedure, and the Cadiere forceps encircles easily the hepatoduodenal ligament breaking out the pars flaccida of the lesser omentum. The umbilical tape is then exteriorized through the chest tube with the use of a 5-mm laparoscopic forceps. The chest tube is finally closed with the plug to avoid air loss. When inflow occlusion is needed, the on-table surgeon removes the plug and blindly pulls the umbilical tape with the left hand while pushing the tube with the right hand. When the desired tape tension is achieved, the chest tube is closed with the plug. With this technique, the console surgeon can proceed with parenchyma transection while the on-table surgeon performs the intermittent vascular occlusions.
Liver resection
All liver resections are guided by LIOUS performed by the on-table surgeon. The console surgeon can view the ultrasound screen in picture-in-picture mode by directing the dissection plane, which appeared as an echogenic line due to entrapment of air bubbles and clots between the cut surfaces. Liver ligaments are sectioned on demand. The round ligament is divided only for right and left lobe resection to apply countertraction; otherwise, it is lifted-up with a transfix suture on the abdominal wall to avoid interference with vision. Triangular and coronal ligaments are cut only for formal left lobectomy, hepatectomy, and for resection of segments 2, 7, and 8. For resections in the posterolateral segments, complete caval dissection is completed. The liver is rotated to the left with the use of a five-finger fan retractor, and the accessory hepatic veins are ligated with Hem-o-lock clips and cut. Parenchyma is usually transected with the harmonic scalpel for straight-line resections. The Kelly clamp crushing technique using endowristed bipolar Precise forceps (Intuitive Surgical Systems, Sunnyvale, CA, USA) is preferred for curved and angulated section line and tumor dissection close to a major liver vessel (Fig. 3). Hemostasis of small vessels is obtained with monopolar or bipolar cautery. To secure larger vessels on the transection line, we use Hem-o-lock® clips or ligatures with Vicryl® or Prolene®. The hepatic veins are usually divided with the laparoscopic linear stapler. Biliostasis is assessed by observation, and bile leaks controlled with sutures.

Intraoperative view of some phases of robot-assisted LHR. Panel 1: inferior vena cava dissection (IVC) with ligation of a right posterior hepatic vein (RPHV) to segment 7. Panel 2: pericystectomy in segment 7. PV: right phrenic vein indicating position of the right hepatic vein (RHV) confluence into the IVC. The intraparenchymal portion of the RHV was compressed by the hydatid cyst as shown in the picture. Panel 3: laparoscopic ultrasound-guided finger compression. In the echographic view the arrow indicates the hyperechoic appearance of the laparoscopic forceps used to compress the portal branch to segment 6 that is already discolored (portion of the liver at the left of the ultrasound probe). Panel 4: hepatic vein from segment 7. Using the Kelly clamp crushing technique it is possible to isolate safely also the hepatic veins. The water in the field is the result of continuous instillation of water for bipolar forceps irrigation
A suction drainage is always left in place.
In case of synchronous CLRM, liver resection is carried out before colon resection to avoid the detrimental effects of prolonged portal vein occlusion on the colonic anastomosis [16].
The specimen is extracted through the umbilical port, as previously described [17].
Statistical analysis
Data in text are given as mean ± standard error (SE). Data were subjected to Student’s t-test, where appropriate, and were considered significantly different at p ≤ 0.05.
Statistical analysis was carried out using Prism 4.0.3 data analysis software (GraphPad Software, San Diego, CA).
Results
Patient characteristics and details of the surgical procedures are summarized in Tables 1 and 2, respectively. Twenty-three patients underwent robot-assisted parenchymal-sparing liver surgery during the study period, and a total of 38 liver nodules distributed in all liver segments (average of 1.6 nodules per patient) were removed.
Patient data and type of resections
The series comprises a wide range of liver involvement in terms of number, location, and nature of lesions.
Ten patients (43.4%) had multiple liver lesions and in four cases bilobar spread. In two of these, robot-assisted liver resection represented the first stage of a two-stage hepatectomy consisting in multiple subsegmentectomies on the left lobe. Both patients had synchronous CRLM. One had right colon cancer with 25 and 4 metastases in the right and left lobe, respectively. The second had left colon cancer with 11 metastases in the right lobe (one of them with diameter 11 cm) and 3 in the left lobe (one of them with diameter 5 cm). Both patients underwent right portal vein embolization 1 week after surgery and the following right hepatectomy 5 weeks later. In 11 patients (47.8%) liver lesions were located in the posterior and superior segments for a total of 14 removed nodules. One subsegmentectomy 1, two subsegmentectomy 7, three subsegmentectomy 8, and two pericystectomies in 4a and 7 were performed. In one case of giant hemangioma (8 cm) and of CRLM (four metastases) a subsegmentectomy 7 was carried out along with a segmentectomy 6. In one case of clear cell renal carcinoma metastasis (diameter 2 cm) deeply located in segment 7, segmentectomy was accomplished successfully.
In six cases the liver mass was in close contact with a main liver vessel. In three cases the tumor was in contact with the left portal branch. In one of them the left portal branch was encompassed by CRLM in segment 2 and in segment 1, respectively.
A bisegmentectomy 2, 3 was then carried out, allowing wide exposition of segment 1. The Spiegel lobe and the paracaval portion of the first segment were mobilized, clipping and dividing the short hepatic veins connecting segment 1 to the inferior vena cava. Transection was completed along a plane passing through the paracaval portion of segment 1. In the other case a no-margin liver resection was possible due to the presence of a thin layer of parenchyma between the CRLM (4 cm diameter) in segment 2 and the left portal vessels.
Two no-margin liver resections were performed for CRLM in close contact with the left hepatic vein (subsegmentectomy 2) and for the above-mentioned renal cell carcinoma in segment 7 with contact <1/3 of the right hepatic vein diameter.
A no-margin resection was successfully obtained also for a 6-cm well-differentiated HCC in segment 8 displacing the middle hepatic vein and separated from the portal branch to segment 8 and 5 by a thin layer of parenchyma. The bile duct from the latter segment was injured during parenchyma transection and repaired with an interrupted 4–0 polydioxanone suture.
Segmentectomy 6 for a HCC in alcohol-related liver cirrhosis was conducted with a hybrid technique. During the first phase we reproduced the ultrasound-guided finger compression described by Torzilli [18]. The portal branch to S6 was identified by LIOUS and compressed between the echographic probe and a laparoscopic forceps. When segment 6 discolored, the resection margin was marked using electrocautery. Parenchyma transection was then completed using the robot under LIOUS guidance (Fig. 3, panel 3).
In two patients with CRLM, four subcentimeter focal liver lesions (three and one, respectively) discovered on LIOUS exploration underwent echo-guided radiofrequency ablation.
In 10 cases liver resection was coupled to laparoscopic colon resection (eight left colectomies and two right colectomies) and in one case to a robot-assisted anterior rectal resection. In two cases robot-assisted liver resection was a second hepatectomy.
Intraoperative data and postoperative outcome
A total of 29 liver resections and 2 pericystectomies were performed. All the procedures were carried out using the four-arm da Vinci robotic system. For liver transection we used the harmonic scalpel and the bipolar forceps in eight cases of straight-line liver section line; in the other cases we preferred the Kelly clamp crushing technique and bipolar/monopolar coagulation. Endoscopic staplers were used only to secure and divide the left hepatic vein in the bisegmentectomy 2–3 and never for parenchyma transection. Intermittent pedicle clamping was applied in 12 cases (52.1%) with mean clamping time of 68.9 min.
Overall mean operative time was 280 ± 101 min. In patients with associated colon resection the mean operative time was 280 ± 115 min, and 268 ± 75 min in patients undergoing only liver resection (p > 0.05). No difference was found also when operative times of liver resections for lesions located in the posterior and superior segments were compared with those of the anterior segments (286 ± 93 versus 288 ± 112 min, respectively).
Mean blood loss was 245 ml, and intraoperative transfusions were required in two cases (8.6%). Bleeding occurred before we standardized the technique of pedicle clamping, and both patients had risk factors for hemorrhage. One underwent preoperative bevacizumab–irinotecan-based chemotherapy, and the other had alcohol-related cirrhosis.
Conversion occurred in two cases (8.6%), a bisegmentectomy 6–7 for HCC in liver cirrhosis and a simultaneous liver and colon resection. Synchronous CLRM were in segments 6 and 7 and the primary tumor in the splenic flexure. Conversion was deemed necessary as result of prolonged operative time due to the long resection plane and obesity, respectively.
Patients were discharged after a mean of 8.9 days (range 3–46 days). Ignoring the higher hospital stay for robot-assisted liver resections (46 days) due to ileocolic anastomosis failure of the concomitant right colectomy, the mean hospital stay was 6.8 ± 2.8 days (median 7 days). Mean hospital stay for patients undergoing liver resection without concomitant colon resection was 5.2 ± 1.9 days (median 4 days, range 3–9 days), while for patients with synchronous CRLM it was 9 ± 2.6 days (median 8 days, range 7–46 days) (p < 0.05).
Reasons for longer stay were colon anastomotic failure and biliary fistula. The first event required reoperation to divert the bowel transit with a loop ileostomy and for the toilette and drainage of the abdominal cavity. Patient with recurrent hydatid cyst in segment 4a developed a low-output biliary fistula that healed spontaneously.
Patients undergoing liver resection in segment 7 experienced prolonged pain (more than 2 weeks) at the level of the thoracic port site, but pneumothorax or inadvertent lung injury did not occur and a chest tube was never inserted.
Pathological examination showed adequate tumor-free margins (1.46 ± 0.8 cm; range 0.1–3 cm) in all specimens except for no-margin resections (four cases). Two out five patients undergoing neoadjuvant chemotherapy had marks of chemotherapy-associated hepatic sinusoidal obstruction syndrome.
After mean follow-up time of 25.1 ± 11.7 months, among 19 patients with malignant tumor, 1 patient with HCC died for tumor progression. Two patients with CRLM died for tumor progression after discontinuation of adjuvant chemotherapy with hepatic, nodal, and peritoneal relapse. Three patients with CRLM are alive with disease (one lung, one lung and nodal, and one liver). Their oncologic history started with colon tumor with synchronous bilobar liver metastases. Two of them received two-stage hepatectomy. Afterwards, two of them underwent a second hepatectomy and one a third hepatectomy for liver recurrence at sites different from those of the first resections. Notably, both patients who died and two out of three alive with disease have a tumor expressing the mutated version of the KRAS gene associated with absence of response to cetuximab. Liver recurrences occurred at sites different from that of the first resection in all but one patient, who received a resection with positive margins to preserve the left hepatic vein in the perspective of a two-stage hepatectomy.
Discussion
Today, surgical treatment of CRLM and HCC is moving toward a parenchymal-sparing approach.
The observation that the width of surgical margin is not correlated with the recurrence rate of CRLM has encouraged several surgeons to favor limited liver resections over major hepatectomies [8, 19, 20].
This approach has the advantage of reduced morbidity without changes in long-term results and offers the possibility of repeated hepatectomies in case of liver recurrence [7, 21, 22].
Recently, this trend has been enhanced by progress in ultrasound-guided liver resections, reducing the need for major hepatectomies even in complex situations such as tumor invasion of the hepatic veins [23, 24].
Anatomic resection of parenchyma involved by the tumor along with its feeding portal branch is considered the gold-standard treatment for HCC. Furthermore, the impaired liver function requires a balance between oncologic requirements and parenchyma preservation.
Two techniques have been proposed to address this issue. The puncture technique proposed by Makuuchi et al. and the latest intraoperative ultrasound-guided finger compression are the most attractive modalities to perform anatomic segmental and subsegmental resections, coupling radical removal of the tumor and maximal parenchyma saving [18, 25].
Moreover, recent evidence supports revision of a standard anatomical resection for HCC. Matsui et al. and Dahiya et al. observed that no-margin resection and extent of resection for HCC do not seem to affect tumor recurrence and long-term survival [14, 26].
In this context, laparoscopic surgery failed to resemble open liver techniques, especially for lesions located in the posterior and superior segments.
Even in studies specifically designed to investigate the role of laparoscopy to approach posterolateral liver malignancies, major resection is the prevalent procedure performed in contrast to minor liver resections for lesions of the anterior segments [6].
This discrepancy can be ascribed to the rigid laparoscopic tools. In fact, segmentectomies and subsegmentectomies of the posterosuperior segments require curved or angulated section lines, which are demanding with instruments with few degrees of freedom [6].
The same trend can be observed also in the latest and larger study on robot-assisted LHR, where liver transection was carried out using the Harmonic device, the sole robotic device with four degrees of freedom [27].
Even though our study presents limitations due to its retrospective basis, the small size series, and the heterogeneity of the liver lesions treated, it clearly shows the potential of robotics to resemble techniques and outcome of parenchymal-sparing OHR.
In 47.8% of cases liver lesions were located in the posterior and superior segments and right hepatectomy was never performed. Limited resection was possible even when the tumor was in contact with a portal branch or hepatic veins, and when both were compressed by the tumor mass.
Use of endowristed instruments also for parenchymal transection was the main achievement during the study period. Returning to a traditional Kelly clamp crushing technique for curved resection planes, avoiding the use of the harmonic scalpel, allowed liver resections to be performed with maximal parenchymal preservation even for lesions that were deeply located and in contact with the main liver vessels.
To date, the Kelly clamp crushing technique coupled to intermittent pedicle clamping is the most efficient method in terms of resection time, blood loss, and blood transfusion frequency and has proved to be also the most cost-efficient device [28–31].
Nevertheless, this technique is not easily reproducible in laparoscopic surgery, favoring the use of the harmonic scalpel, the dissecting sealer, and other transection devices. Additionally, the inflow occlusion allows a bloodless transection plane with continuous visualization of the vascular structures that can be divided or preserved according to the operative strategy. Even though the Pringle maneuver, especially when prolonged, is considered harmful, there is not strong evidence supporting its detrimental effects on liver metabolism, and its use has been demonstrate to be safe [32].
Therefore, we consider the opportunity to reproduce this technique a major advantage of robotic surgery over traditional laparoscopy even if the robot-assisted Kelly clamp crushing technique could be further improved with the introduction of irrigated bipolar forceps. In fact, the on-table surgeon who continuously irrigates and aspirates the transection plane obviates the lack of an irrigating channel running down the length of to robotic bipolar forceps to allow the introduction of saline solution to the operating site. This technique was standardized only in the last year and thus used only in eight patients.
Trocar position is another crucial issue in this setting, especially to approach lesions in segment 7. The transcostal port site enables a wide range of movements of the entire robotic system, necessary for inferior vena cava dissection and parenchyma transection of segment 7. In fact, the extremely posterior position of this trocar enables great maneuverability in the right paracaval space and considerable reduction of external arm fighting due to the proper distance between the three robotic trocars. In addition, the camera port inserted at the level of the costal margin with its major axis parallel to that of the inferior vena cava and patient rotation on the left flank are essential for complete caval dissection and right liver retraction.
Criticisms of this study could be voiced because, in two patients, robot-assisted resection preceded right portal vein embolization and one of the aims of strict parenchymal-sparing surgery is to avoid two-stage hepatectomy [13].
However, we are confident that lesion dimensions in one case and number in the other would have made oncologically appropriate multiple resections of right lobe liver metastases impossible. In one of these two patients and in another with bilobar CRLM we used laparoscopic RFA to aid tumor clearance. Lesions were subcentimeter in both cases and were missed at the postchemotherapy CT scan, detected during LIOUS exploration, and finally ablated. Even though the use of RFA can be criticized for CRLM treatment, we preferred to reduce the risk of postoperative morbidity from multiple segmentectomies for very small lesions in patients with advanced disease requiring aggressive postoperative chemotherapy [33]. Therefore, we ascribe the use of RFA to a tactical choice more than to a failure of the technique.
HCC was approached according to the above-mentioned techniques.
A segmentectomy 6 was accomplished using the laparoscopic counterpart of the Torzilli’s ultrasound-guided finger compression, and to the best of our knowledge this is the first such report in literature [34]. No-margin resection was successfully carried out for a large tumor in segment 8 displacing the middle hepatic vein and the branches of the right portal pedicle.
The series also included two patients with liver hydatid cysts located in segments 4a and 7, respectively. The peculiarities of these lesions are very different from those of malignancies, but their anatomical locations and the type of resections performed were considered helpful to show advantages of robot-assisted LHR.
Robot-assisted resections were associated with an acceptable morbidity rate. There were only three cases of liver surgery-related morbidity: two intraoperative hemorrhages requiring transfusion before optimization of the Pringle maneuver, and one bile leak healed without interventions. A note of caution for the use of the intercostal port derives from the risk of prolonged postoperative pain. However, cases of accidental lung injury or pneumothorax requiring chest drainage were not reported, in agreement with previous series [15].
The mean duration of hospital stay did not differ significantly from historical series of OHR, but an extended period of surveillance was mandatory also for asymptomatic patients due to the experimental nature of the procedure.
In conclusion, real advantages of robotic surgery over laparoscopic surgery have not been clearly demonstrated. Concerning liver surgery, previous studies have demonstrated feasibility and safety of robotic assistance for major hepatectomies, complex biliary reconstructions, and liver resections for synchronous CRLM [11, 27, 35]. On the contrary, no clear benefits of robot-assisted surgery were shown for resection of peripheral liver lesions [36].
Finally, results of this series show that robot-assisted LHR is safe and feasible and provide considerable evidence that robotics could overcome limitations of traditional LHR associated with tumor location, supporting robot use only for complex resections. In fact, major advantages of the da Vinci robotic system are appreciable when the robot is not used as a laparoscopic tool but as an extension of the human hand, reproducing the vast amount of movements, techniques, and tricks learned in open liver surgery practice to perform complex resections close to major liver vessels, in posterosuperior segments, or when biliary reconstruction is required. Controlled studies to verify these observations are mandatory.
References
Simillis C, Constantinides VA, Tekkis PP, Darzi A, Lovegrove R, Jiao L, Antoniou A (2007) Laparoscopic versus open hepatic resections for benign and malignant neoplasms–a meta-analysis. Surgery 141:203–211
Cherqui D (2003) Laparoscopic liver resection. Br J Surg 90:644–646
Abu Hilal M, Underwood T, Taylor MG, Hamdan K, Elberm H, Pearce NW (2010) Bleeding and hemostasis in laparoscopic liver surgery. Surg Endosc 24:572–577
Buell JF, Cherqui D, Geller DA, O’Rourke N, Iannitti D, Dagher I, Koffron AJ, Thomas M, Gayet B, Han HS, Wakabayashi G, Belli G, Kaneko H, Ker CG, Scatton O, Laurent A, Abdalla EK, Chaudhury P, Dutson E, Gamblin C, D’Angelica M, Nagorney D, Testa G, Labow D, Manas D, Poon RT, Nelson H, Martin R, Clary B, Pinson WC, Martinie J, Vauthey JN, Goldstein R, Roayaie S, Barlet D, Espat J, Abecassis M, Rees M, Fong Y, McMasters KM, Broelsch C, Busuttil R, Belghiti J, Strasberg S, Chari RS (2009) The international position on laparoscopic liver surgery: The Louisville Statement, 2008. Ann Surg 250:825–830
Buell JF, Thomas MT, Rudich S, Marvin M, Nagubandi R, Ravindra KV, Brock G, McMasters KM (2008) Experience with more than 500 minimally invasive hepatic procedures. Ann Surg 248:475–486
Cho JY, Han HS, Yoon YS, Shin SH (2009) Outcomes of laparoscopic liver resection for lesions located in the right side of the liver. Arch Surg 144:25–29
Gold JS, Are C, Kornprat P, Jarnagin WR, Gonen M, Fong Y, DeMatteo RP, Blumgart LH, D’Angelica M (2008) Increased use of parenchymal-sparing surgery for bilateral liver metastases from colorectal cancer is associated with improved mortality without change in oncologic outcome: trends in treatment over time in 440 patients. Ann Surg 247:109–117
Torzilli G, Montorsi M, Donadon M, Palmisano A, Del Fabbro D, Gambetti A, Olivari N, Makuuchi M (2005) “Radical but conservative” is the main goal for ultrasonography-guided liver resection: prospective validation of this approach. J Am Coll Surg 201:517–528
Nardo B, Patriti A, Piazzese E, Cavallari G, Montalti R, Beltempo P, Bertelli R, Puviani L, Cavallari A (2003) Radical surgical treatment of recurrent hepatic hydatidosis. Hepatogastroenterology 50:1478–1481
Patriti A, Graziosi L, Sanna A, Gulla N, Donini A (2005) Laparoscopic treatment of liver hemangioma. Surg Laparosc Endosc Percutan Techn 15:359–362
Patriti A, Ceccarelli G, Bartoli A, Spaziani A, Lapalorcia LM, Casciola L (2009) Laparoscopic and robot-assisted one-stage resection of colorectal cancer with synchronous liver metastases: a pilot study. J Hepatobiliary Pancreat Surg 16:450–457
Pang YY (2002) The Brisbane 2000 terminology of liver anatomy and resections. HPB 2000; 2:333-39. HPB (Oxford) 4: 99; author reply 99-100
Torzilli G, Procopio F, Botea F, Marconi M, Del Fabbro D, Donadon M, Palmisano A, Spinelli A, Montorsi M (2009) One-stage ultrasonographically guided hepatectomy for multiple bilobar colorectal metastases: a feasible and effective alternative to the 2-stage approach. Surgery 146:60–71
Matsui Y, Terakawa N, Satoi S, Kaibori M, Kitade H, Takai S, Kwon AH, Kamiyama Y (2007) Postoperative outcomes in patients with hepatocellular carcinomas resected with exposure of the tumor surface: clinical role of the no-margin resection. Arch Surg 142:596–602; discussion 603
Gumbs AA, Gayet B (2008) Video: the lateral laparoscopic approach to lesions in the posterior segments. J Gastrointest Surg 12:1154
Simsek A, Yagci G, Zeybek N, Gorgulu S, Kaymakcioglu N, Kesim E, Akdeniz A, Ozmen MM, Renda N (2002) Effects of portal triad occlusion on left-sided colonic anastomosis. Int Surg 87:25–30
Casciola L, Codacci-Pisanelli M, Ceccarelli G, Bartoli A, Di Zitti L, Patriti A (2008) A modified umbilical incision for specimen extraction after laparoscopic abdominal surgery. Surg Endosc 22:784–786
Torzilli G, Procopio F, Cimino M, Del Fabbro D, Palmisano A, Donadon M, Montorsi M (2010) Anatomical segmental and subsegmental resection of the liver for hepatocellular carcinoma: a new approach by means of ultrasound-guided vessel compression. Ann Surg 251:229–235
Elias D, Cavalcanti A, Sabourin JC, Lassau N, Pignon JP, Ducreux M, Coyle C, Lasser P (1998) Resection of liver metastases from colorectal cancer: the real impact of the surgical margin. Eur J Surg Oncol 24:174–179
Muratore A, Ribero D, Zimmitti G, Mellano A, Langella S, Capussotti L (2010) Resection margin and recurrence-free survival after liver resection of colorectal metastases. Ann Surg Oncol 17:1324–1329
Ferrero A, Vigan L, Lo Tesoriere R, Russolillo N, Sgotto E, Capussotti L (2009) Bisegmentectomies as alternative to right hepatectomy in the treatment of colorectal liver metastases. Hepatogastroenterology 56:1429–1435
Vigano L, Ferrero A, Sgotto E, Polastri R, Muratore A, Capussotti L (2005) Parenchyma sparing: evolution of the resective surgical approach of hepatic metastasis from the colorectum. Suppl Tumori 4:S35
Torzilli G, Botea F, Donadon M, Cimino M, Del Fabbro D, Palmisano A (2010) Minimesohepatectomy for colorectal liver metastasis invading the middle hepatic vein at the hepatocaval confluence. Ann Surg Oncol 17:483
Torzilli G, Montorsi M, Del Fabbro D, Palmisano A, Donadon M, Makuuchi M (2006) Ultrasonographically guided surgical approach to liver tumours involving the hepatic veins close to the caval confluence. Br J Surg 93:1238–1246
Makuuchi M HH, Yamazaki S. (1981) Intraoperative ultrasonic examination for hepatectomy. Jpn J Clin Oncol 367-390
Dahiya D, Wu TJ, Lee CF, Chan KM, Lee WC, Chen MF (2010) Minor versus major hepatic resection for small hepatocellular carcinoma (HCC) in cirrhotic patients: a 20-year experience. Surgery 147:676–685
Giulianotti PC, Coratti A, Sbrana F, Addeo P, Bianco FM, Buchs NC, Annechiarico M, Benedetti E (2011) Robotic liver surgery: results for 70 resections. Surgery 149:29–39
Gurusamy KS, Pamecha V, Sharma D, Davidson BR (2009) Techniques for liver parenchymal transection in liver resection. Cochrane Syst Rev (Online): CD006880
Gurusamy KS, Sheth H, Kumar Y, Sharma D, Davidson BR (2009) Methods of vascular occlusion for elective liver resections. Cochrane Syst Rev (Online): CD007632
Takayama T, Makuuchi M, Kubota K, Harihara Y, Hui AM, Sano K, Ijichi M, Hasegawa K (2001) Randomized comparison of ultrasonic vs clamp transection of the liver. Arch Surg 136:922–928
Lesurtel M, Selzner M, Petrowsky H, McCormack L, Clavien PA (2005) How should transection of the liver be performed?: a prospective randomized study in 100 consecutive patients: comparing four different transection strategies. Ann Surg 242:814–822; discussion 822-813
Gurusamy KS, Kumar Y, Ramamoorthy R, Sharma D, Davidson BR (2009) Vascular occlusion for elective liver resections. Cochrane Syst Rev (Online): CD007530
Kornprat P, Jarnagin WR, DeMatteo RP, Fong Y, Blumgart LH, D’Angelica M (2007) Role of intraoperative thermoablation combined with resection in the treatment of hepatic metastasis from colorectal cancer. Arch Surg 142:1087–1092
Torzilli G, Donadon M, Cimino M, Del Fabbro D, Procopio F, Botea F (2009) Systematic subsegmentectomy by ultrasound-guided finger compression for hepatocellular carcinoma in cirrhosis. Ann Surg Oncol 16:1843
Giulianotti PC, Sbrana F, Bianco FM, Addeo P (2010) Robot-assisted laparoscopic extended right hepatectomy with biliary reconstruction. J Laparoendosc Adv Surg Tech 20:159–163
Berber E, Akyildiz HY, Aucejo F, Gunasekaran G, Chalikonda S, Fung J (2010) Robotic versus laparoscopic resection of liver tumours. HPB (Oxford) 12:583–586
Acknowledgment
The authors wish to thank the nursing staff of the Department of Surgery, Hospital San Matteo degli Infermi for their daily work.
Disclosure
Authors Luciano Casciola, Alberto Patriti, Graziano Ceccarelli, Alberto Bartoli, Cecilia Ceribelli, and Alessandro Spaziani have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Additional information
The first two authors are joint first authors.
Rights and permissions
About this article
Cite this article
Casciola, L., Patriti, A., Ceccarelli, G. et al. Robot-assisted parenchymal-sparing liver surgery including lesions located in the posterosuperior segments. Surg Endosc 25, 3815–3824 (2011). https://doi.org/10.1007/s00464-011-1796-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-011-1796-9