
Abstract
Background/purpose
One-stage resection of primary colon cancer and synchronous liver metastases is considered an effective strategy of cure. A laparoscopic approach may represent a safe and advantageous choice for selected patients with the aim of improving the early outcome.
Methods
Between January 2008 and October 2008, 7 patients underwent one-stage laparoscopic resection for primary colorectal cancer combined with laparoscopic or robot-assisted liver resection.
Results
A total of five laparoscopic left-colon, one right-colon, and one rectal resections were performed. Three patients underwent preoperative left-colon stenting and two received neoadjuvant chemotherapy. The patient with rectal cancer underwent neoadjuvant radiotherapy. Liver procedures included one bisegmentectomy (segments 2, 3), 3 segmentectomies, 6 metastasectomies, and four laparoscopic ultrasound-guided radiofrequency ablations (LUG-RFAs). One patient with multiple liver metastases was managed by a two-stage hepatectomy partially conducted by a totally laparoscopic approach. The overall postoperative morbidity was null. The median hospital stay was 10 days (range 7–10 days).
Conclusions
This pilot study suggests that laparoscopic one-stage colon and liver resection is feasible and safe. Robot assistance may facilitate liver resection, increasing the number of patients who may benefit from a minimally invasive operation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Twenty percent of newly diagnosed colorectal cancers have liver metastases (LM) [1]. The current strategy of treatment involves a multidisciplinary approach that addresses both the primary tumor and the metastatic disease [2, 3]. One-stage resection of both malignancies is considered effective in terms of quality of life and costs, but only a few patients have resectable LM and an asymptomatic primary tumor [3]. The remaining majority of patients have a disease that is initially unresectable due to either the number, size, and location of metastases or to insufficient liver reserve. Regional therapies, along with neoadjuvant chemotherapy, are promising treatment options in these patients to downsize the LM, allowing a subsequent one-stage resection [2]. Self-expandable metal stents (SEMS) are new devices used in order to delay surgery in patients with a symptomatic primary tumor with resectable LM and to administer early neoadjuvant chemotherapy in the presence of unresectable liver disease [4]. In this context, the role of laparoscopic one-stage colorectal and liver resection is poorly investigated and, to the best of our knowledge, only a few anecdotal reports have been published [5, 6]. The potential benefit of a minimally invasive approach is the possibility to perform a radical operation, improving the early outcome and allowing a better tolerance of adjuvant chemotherapy [7]. Unfortunately, the complexity of laparoscopic liver resection is the main factor limiting the widespread diffusion of this approach. Robot-assisted surgery overcomes the intrinsic limitations of laparoscopy, improving maneuverability and vision. From this perspective also demanding procedures can be performed in a minimally invasive fashion, broadening the indications for a laparoscopic approach to synchronous LM. The aim of this pilot study was to prospectively evaluate the efficacy and safety of one-stage resection of synchronous colorectal LM with a traditional and robot-assisted laparoscopic approach using the three-arm Intuitive Da Vinci System (Intuitive Surgical, Mountain View, CA, USA).
Patients and methods
Between January and October 2008 a minimally invasive approach was proposed to all patients referred to our institution with a diagnosis of colorectal cancer and synchronous LM, irrespective of the size and location of the primary and metastatic disease. Prior consent was obtained and full treatment options where submitted to all patients treated. Data collected were prospectively analyzed.
Indications
Preoperative workup included total-body contrast-enhanced computed tomography (CT), colonscopy, liver gadoxetic acid-enhanced magnetic resonance imaging (MRI), tumor markers, and routine blood examination. The unique criteria for unresectability were considered to be the nonnfeasibility of completing liver resection with anticipated negative surgical margins and an insufficient liver remnant. In patients with multiple bilobar metastases a potentially curative resection was planned after neoadjuvant chemotherapy. Indications for portal vein embolization (PVE), two-stage hepatic resection, and the combined use of resection with radiofrequency ablation were discussed during multidisciplinary meetings and were not considered contraindications for the laparoscopic approach. Patients with left-sided colon obstruction underwent endoscopic stenting with SEMS prior to surgery or chemotherapy. The choice between a traditional and a robot-assisted operation was based on the complexity of the planned liver resection. Traditional laparoscopy was used if the LM were smaller than 5 cm in diameter and located in the peripheral right segments (segments 5, 6) and in segments 3 and 4b. Robotics was preferred for operations encompassing the resection of two or more liver segments, portal triad dissection, selective clamping, and tumor location in segments 1, 8, and 7.
Technique
The patient is placed in the supine position and for lesions in the right lobe is slightly rotated on the left flank during section of the right coronal and triangular ligaments and right hepatic vein isolation. A central line is inserted prior to surgery in order to monitor the central venous pressure, which is maintained at 4–5 cmH2O during liver transection.
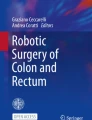
After pneumoperitoneum induction at 12 mmHg by means of a Verres needle, a camera port is inserted at the level of the umbilicus. Operative trocars are disposed based on the site of the colon cancer, as shown in Fig. 1, and two additional 10-mm trocars are placed in the upper quadrants for hepatic resection. These two trocars allow the insertion of the 8-mm Intuitive trocars (“trocar in trocar” technique) for the introduction of the robotic instruments. For lesions in segments 8 and 7, the three robotic trocars are placed at the level of the right costal margin (Fig. 2). The robot is usually docked over the patient’s head and the on-table assistant stays in between the patient’s legs using the other trocars for suction, traction, and stapling (Fig. 2).

Trocar disposition for right (a) and left colectomy (b). Operative robotic trocars for liver surgery are disposed along the arches drawn in the upper abdominal quadrants in relation to tumor location

Trocar and robot disposition to approach rectal cancer and synchronous liver metastases in liver segments 7 and 8. a Robotic arms disposition. b Trocar disposition: a camera port for liver resection; b and c operative robotic trocars for liver resection; d camera port for rectal resection and accessory trocar for liver resection; e operative port for rectal resection and accessory trocar for liver resection; f accessory trocars; g minilaparotomy for specimen extraction
Liver resection
Liver resection is carried out before colon resection to avoid the detrimental effects of a prolonged portal vein occlusion on the colonic anastomosis [8]. A careful abdominal inspection is carried out to rule out peritoneal carcinosis. Liver vascular anatomy and the sites of LM are defined by laparoscopic liver ultrasonography. Projections on the liver surface of the hepatic veins, main portal branches close to the liver mass, and the transection plane are marked with electrocautery. The lesser omentum is sectioned and the hepatoduodenal ligament is encircled by a tape to be used as a tourniquet for complete interruption of blood inflow to the liver only if necessary.
Liver ligaments are sectioned on demand. The round ligament is divided only for right and left lobe resection to apply a countertraction; otherwise, it is lifted up with a transfix suture on the abdominal wall to avoid an obstacle to vision. The triangular and coronal ligaments are cut only for formal left lobectomy, hepatectomy, and for resection of segments 2, 7, and 8. Parenchyma is usually transected with a harmonic scalpel. Hemostasis of small vessels is obtained with monopolar or bipolar cautery and in robotic surgery with the use of a Gyrus Plasma Trissector (Gyrus Group, Gyrus International, UK). To secure larger vessels on the transection line we use clips or ligatures with Vicryl. The portal pedicle and the hepatic veins are usually divided with a laparoscopic linear stapler. In all the circumstances, the hepato-duodenal ligament dissection is carried out by a robotic approach, using the articulated hook dissector (Fig. 3).

Operative fields of robot-assisted liver resections. a Section of the left triangular ligament. b Section of the coronal ligament with exposition of the inferior vena cava (IVC). c Hilar dissection for resection of S1 and bisegmentectomy of segments 2 and 3. The left hepatic artery (LHA) and left portal vein (LPV) are shown. d Dissection at the level of the Ganz fossa and isolation of the portal branch (VPL) and artery (APL) for the right posterior section. e Section of the left hepatic vein (LHV) for a bisegmentectomy of segments 2 and 3. f Mobilization of S1 and dissection of an accessory vein for S1. g Transection line of a bisegmentectmy of segments 2 and 3. h Radiofrequency ablation of a lesion between segments 6 and 7
Definitive hemostasis is obtained with monopolar coagulation in spray modality on the transected liver surface and finally by applying fibrin sealant (Quixil fibrin glue; Ethicon, Cincinnati, OH, USA) if necessary. Biliostasis is assessed by observation and bile leaks are controlled with sutures.
Colorectal resection
Laparoscopic colon resection is carried out using a standard technique. Briefly, right-colon resection starts with dissection and ligation of the ileocolic and right-colon vessels at their origin. The colon transversum is then sectioned with a linear stapler. The gastrocolic ligament is opened and Henle’s trunk is ligated at its confluence in the superior mesenteric vein. The right colon is completely mobilized and a side-to-side totally intracorporeal anastomosis is performed, as previously described [9].
For left-colon resection, the inferior mesenteric vein is tied with clips and cut at the inferior edge of the pancreatic tail. The inferior mesenteric artery is highly ligated. Medial to lateral mobilization of the left colon is performed using a harmonic scalpel, and colon transection is carried out with an endoscopic linear stapler.
Rectal resection with mesorectal excision is carried out using a robot-assisted approach. The DaVinci robotic system is docked in between the patient’s legs. The two working arms usually carry a Cadier forceps on the left and a hook cautery on the right. After ligation and division of the inferior mesenteric vessels, dissection is continued in the fashion of a total mesorectal excision (TME). The cleavage plane between the presacral fascia and the visceral layer that underlies the mesorectum is identified at the level of the sacral promontory.
Mesorectal dissection is then carried out circumferentially using the hook cautery. Measurement of the distance between the tumor and the cutting line is performed by digital exploration or endoscopy.
Once the TME is completed the assistant divides the distal rectum, using a 30-mm linear stapler through the 12-mm laparoscopic port, and a stapled anastomosis is created transanally. In a right-colon resection, both hepatic and colonic specimens are extracted, enlarging the umbilical incision [10]; a minilaparotomy in the left lower quadrant is used when there is left colon and rectal localization of the primary tumor.
We routinely leave two abdominal tubes, to drain the liver transection plane and the colonic anastomosis, respectively. Patients resume a liquid diet on postoperative day two and a full diet on day five.
Results
All seven patients referred to our institution for synchronous colorectal LM during the study period underwent one-stage laparoscopic colon and liver resection. Patient characteristics and details of the surgical procedures are summarized in Table 1. Only patient 2 underwent laparoscopic colon and liver resection, while the others received a laparoscopic colectomy and a robot-assisted liver resection. Patient 7 underwent robot-assisted TME and metastasectomy of segment 8.
The clinical scenarios and the extent of LM in this series are fully representative of the wide range of presentation of synchronous colorectal LM. Four patients were completely asymptomatic and diagnosis was made incidentally. The other three patients were admitted to our ward for colonic obstruction that was palliated by SEMS. Only patient 6 had a single LM, while patients 4 and 5 were deemed unresectable because of bilobar metastases. Patient 4 had multiple metastases, the larger ones in segments 2 and 1, the latter infiltrating the left portal pedicle. The other metastases had a diameter of 1.5 cm and were in segments 4, 6, and 7.
Patient 5 had multiple metastases with a 13-cm mass in close contact with the right hepatic vein. Two patients underwent neoadjuvant chemotherapy after colonic stenting. Patient 4 successfully completed 4 cycles of the FOLFOX4 regimen and the evaluation by CT and MRI revealed a significant downsizing of liver masses in segments 1 and 2 and a complete radiological response of nodules in segment 4, 6, and 7. These three lesions were easily identified at the intraoperative ultrasonography and were ablated with intraoperative laparoscopic ultrasound-guided radiofrequency ablation (LUG-RFA). A bisegmentectomy of segments 2 and 3 was then carried out, allowing a wide exposition of segment 1. The Spiegel lobe and the paracaval portion of the first segment were mobilized, clipping and dividing the short hepatic veins connecting segment 1 to the inferior vena cava. Transection was completed with the harmonic scalpel along a plane passing through the paracaval portion of segment 1.
Patient 5 had multiple bilobar LM. After 3 cycles of FOLFOX4 he was re-admitted to our department for bowel obstruction due to stent dislocation. We performed a diverting cecostomy and the preoperative CT and MRI revealed a good response to chemotherapy. After one week the patient underwent a total of three wedge resections of segments 2 and 3 and LUG-RFA of the metastasis in segment 4. After seven cycles of FOLFOX4 plus bevacizumab—which led to a 50% reduction in diameter of the right LM—and percutaneous PVE, a robot-assisted right hepatectomy was planned. Unfortunately, a right subcostal minilaparotomy was necessary for definitive hemostasis and specimen extraction.
Patient 7 at the preoperative CT had a T3 rectal cancer and a 1.5-cm liver metastasis in segment 8. Three weeks after the completion of a short course of radiotherapy (45 Gy in 5 days) he underwent robot-assisted TME with a stapled coloanal anastomosis and metastastectomy in segment 8. The postoperative period was uneventful in all patients. Pathology examinations showed adequate tumor-free margins in all specimens.
Both patients who underwent neoadjuvant chemotherapy had signs of chemotherapy-associated hepatic sinusoidal obstruction syndrome. The three patients with SEMS had a complete response of the primary tumor to chemotherapy. At the follow up, all but two patients were disease-free survivors.
Discussion
Simultaneous liver and colon resection for synchronous colorectal LM is considered oncologically advantageous and cost-effective [2]. Massive tumor reduction may guarantee a better response to adjuvant chemotherapy and the lack of repeated postoperative immunodeficiency improves immunological patient defence against tumor cells [11–13].
Even though this procedure is demanding and involves expertise in both liver and colorectal surgery, it has been demonstrated to be associated with acceptable morbidity also when a major hepatectomy is required [3].
The role of laparoscopy in this setting is not well investigated [5, 14]. Laparoscopic liver resection is as effective as the open counterpart to obtain tumor-free resection margins and it improves early outcome by reducing surgical trauma and operative blood loss. All these factors positively influence the outcome in cancer patients, allowing early access to adjuvant chemotherapy, better acceptance of repeated operations, and preservation of the immune defence [7, 15].
Laparoscopic colon resection has been associated with a better early outcome as well, and has shown a tendency of higher overall survival and higher cancer-related survival when compared to open colectomy [16].
Cumulative analysis of these data leads to the reasonable conclusion that laparoscopic simultaneous liver and colon resection could be a valid therapeutic option for patients with synchronous LM from colorectal cancer.
Our pilot study demonstrates that both the primary and the metastatic tumors can be safely resected laparoscopically during the same operation. Operative times were long but the advantages observed in this small series are noteworthy.
Blood loss is minimal even with major hepatic resections, and chemotherapy-associated hepatotoxicity was tolerable. Portal triad clamping was necessary in one patient and transfusions in two. Only one patient required a hand-assisted procedure to complete the poor hemostasis, which was probably related to chemotherapy-associated hepatotoxicity. Moreover, with the use of a laparoscopic ultrasonographic probe combined resection and RFA procedures were possible.
The postoperative period was excellent and without morbidity, allowing all patients to resume their normal activities early. These data were not paralleled by the duration of the hospital stay, which did not differ significantly from historical series of open one-stage colorectal and liver resection; however, an extended period of surveillance was mandatory for asymptomatic patients also, due to the experimental nature of the procedure [3].
Several factors play a crucial role in planning and carrying out a laparoscopic approach to synchronous colorectal LM.
Extensive experience of surgeons in advanced laparoscopy and colorectal and liver surgery is fundamental but it is as important as a good collaboration with all the team involved in the management of the cancer patient.
PVE should be numbered among the therapeutic options available in order to safely perform both parts of a two-stage hepatectomy laparoscopically. In fact, percutaneous access to the right portal vein preserves the hepatic pedicle from postoperative adhesions and anatomical modifications that could impair the right hepatectomy in the second stage of the procedure. Finally, robotics overcomes the intrinsic limitations of traditional laparoscopy, widens the indications, and enhances the potential of minimally invasive liver surgery [17]. Stable and three-dimensional views and tremor filtering are extremely useful for dissection of the hepatoduodenal ligament where a fine dissection is required.
Wristed instruments, allowing seven degrees of freedom facilitate maneuvers in narrow spaces, resulting in improved ergonomics and precision during the isolation and ligation of the small hepatic veins for segments 7 and 1.
Bleeding control, considered the first cause of conversion in laparoscopic liver surgery [18], is made easier by the facilitation in tying knots and sutures.
Moreover, the forthcoming integration of robotic systems with medical imaging has promising future applications in liver surgery. Computer-aided surgery will refine therapeutic planning, and navigation systems will give greater accuracy in determining resection margins and needle-probe insertion for LUG-RFA [19].
In conclusion, laparoscopic treatment of synchronous colorectal LM seems to be feasible and safe. The use of the Da Vinci robotic system for liver resections could increase indications for a minimally invasive approach for an increasing number of patients with LM. Nevertheless, these data need confirmation in comparative controlled studies and in larger series, including major hepatic resections.
References
Nordlinger B, Guiguet M, Vaillant JC, Balladur P, Boudjema K, Bachellier P, et al. Surgical resection of colorectal carcinoma metastases to the liver. A prognostic scoring system to improve case selection, based on 1568 patients. Association Francaise de Chirurgie. Cancer. 1996;77:1254–62.
Adam R. Colorectal cancer with synchronous liver metastases. Br J Surg. 2007;94:129–31.
Capussotti L, Ferrero A, Vigano L, Ribero D, Lo Tesoriere R, Polastri R. Major liver resections synchronous with colorectal surgery. Ann Surg Oncol. 2007;14:195–201.
Karoui M, Charachon A, Delbaldo C, Loriau J, Laurent A, Sobhani I, et al. Stents for palliation of obstructive metastatic colon cancer: impact on management and chemotherapy administration. Arch Surg. 2007;142(7):619–23. discussion 623.
Geiger TM, Tebb ZD, Sato E, Miedema BW, Awad ZT. Laparoscopic resection of colon cancer and synchronous liver metastasis. J Laparoendosc Adv Surg Tech A. 2006;16(1):51–3.
Bretagnol F, Hatwell C, Farges O, Alves A, Belghiti J, Panis Y. Benefit of laparoscopy for rectal resection in patients operated simultaneously for synchronous liver metastases: preliminary experience. Surgery. 2008;144(3):436–41.
Simillis C, Constantinides VA, Tekkis PP, Darzi A, Lovegrove R, Jiao L, et al. Laparoscopic versus open hepatic resections for benign and malignant neoplasms—a meta-analysis. Surgery. 2007;141(2):203–11.
Simsek A, Yagci G, Zeybek N, Gorgulu S, Kaymakcioglu N, Kesim E, et al. Effects of portal triad occlusion on left-sided colonic anastomosis. Int Surg. 2002;87(1):25–30.
Casciola L, Ceccarelli G, Di Zitti L, Valeri R, Bellochi R, Bartoli A, et al. Laparoscopic right hemicolectomy with intracorporeal anastomosis. Technical aspects and personal experience. Minerva Chir. 2003;58(4):621–7.
Casciola L, Codacci-Pisanelli M, Ceccarelli G, Bartoli A, Di Zitti L, Patriti A. A modified umbilical incision for specimen extraction after laparoscopic abdominal surgery. Surg Endosc. 2008;22(3):784–6.
Elias D, Detroz B, Lasser P, Plaud B, Jerbi G. Is simultaneous hepatectomy and intestinal anastomosis safe? Am J Surg. 1995;169(2):254–60.
Weese JL, Ottery FD, Emoto SE. Do operations facilitate tumor growth? An experimental model in rats. Surgery. 1986;100(2):273–7.
Kondo E, Koda K, Takiguchi N, Oda K, Seike K, Ishizuka M, et al. Preoperative natural killer cell activity as a prognostic factor for distant metastasis following surgery for colon cancer. Dig Surg. 2003;20(5):445–51.
Leung KL, Lee JF, Yiu RY, Ng SS, Li JC. Simultaneous laparoscopic resection of rectal cancer and liver metastasis. J Laparoendosc Adv Surg Tech A. 2006;16(5):486–8.
Cherqui D, Husson E, Hammoud R, Malassagne B, Stephan F, Bensaid S, et al. Laparoscopic liver resections: a feasibility study in 30 patients. Ann Surg. 2000;232(6):753–62.
Lacy AM, Delgado S, Castells A, Prins HA, Arroyo V, Ibarzabal A, et al. The long-term results of a randomized clinical trial of laparoscopy-assisted versus open surgery for colon cancer. Ann Surg. 2008;248(1):1–7.
Choi SB, Park JS, Kim JK, Hyung WJ, Kim KS, Yoon DS, et al. Early experiences of robotic-assisted laparoscopic liver resection. Yonsei Med J. 2008;49(4):632–8.
Vibert E, Perniceni T, Levard H, Denet C, Shahri NK, Gayet B. Laparoscopic liver resection. Br J Surg. 2006;93(1):67–72.
Leven J, Burschka D, Kumar R, Zhang G, Blumenkranz S, Dai XD, et al. DaVinci canvas: a telerobotic surgical system with integrated, robot-assisted, laparoscopic ultrasound capability. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2005;8(Pt 1):811–8.
Author information
Authors and Affiliations
Corresponding author
About this article
Cite this article
Patriti, A., Ceccarelli, G., Bartoli, A. et al. Laparoscopic and robot-assisted one-stage resection of colorectal cancer with synchronous liver metastases: a pilot study. J Hepatobiliary Pancreat Surg 16, 450–457 (2009). https://doi.org/10.1007/s00534-009-0073-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00534-009-0073-y