
Abstract
This paper introduces a new version for the nonlinear Ginzburg–Landau equation derived from fractal–fractional derivatives and proposes a computational scheme for their numerical solutions. The fractal–fractional derivative is defined in the Atangana–Riemann–Liouville sense with Mittage–Leffler kernel. The proposed approach is based on the shifted Chebyshev polynomials (S-CPs) and the collocation scheme. Through the way, a new operational matrix (OM) of fractal–fractional derivative is derived for the S-CPs and used in the presented method. More precisely, the unknown solution is separated into their real and imaginary parts, and then, these parts are expanded in terms of the S-CPs with undetermined coefficients. These expansions are substituted into the main equation and the generated operational matrix is utilized to extract a system of nonlinear algebraic equations. Thereafter, the yielded system is solved to obtain the approximate solution of the problem. The accuracy of the proposed approach is examined through some numerical examples. Numerical results confirm the suggested approach is very accurate to provide satisfactory results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Over the last decades, fractional calculus (the theory of integral and derivative operators of arbitrary orders) has been extensively studied to express various phenomena in Engineering and Physics, e.g. [1,2,3,4]. This concept has been usefully utilized in electromagnetism [5], fluid mechanics [6], visco-elastic materials [7], propagation of spherical flames [8] and dynamics of viscoelastic materials [9]. Note that the main reason of using fractional operators in modeling physical systems is their non-local property (which it means that the present state and all the previous states of a dynamical system affect on the its next state) [10, 11]. Some useful results about theoretical analysis of such operators can be found in [12,13,14]. It should be noted that such operators are often singular. So, it is very difficult to get analytic solutions for problems involving fractional operators. In recent years, several numerical methods have been proposed for solving such problems, for instance, see [15,16,17,18,19].
One of the most-investigated nonlinear partial differential equations in Physics and Engineering is the Ginzburg–Landau equation. This equation describes various types of phenomena, such as nonlinear waves, second-order phase transitions, superfluidity, superconductivity, Bose–Einstein condensation, strings in field theory and liquid crystals [20]. Therefore, it is very necessary to solve this equation. However, there are many numerical and analytical methods for the numerical solution of this equation, for instance, see [21, 21,22,23,24,25]. The fractional version of the Ginzburg–Landau equation has been well examined from various aspects, for instance, see [26,27,28,29] and references therein.
In recent years, the orthogonal polynomials have been widely utilized for the numerical solution of various types of problems in Engineering and Science, for instance, see [30, 31]. The main reason for such wide applications is that solving the original problem is changed to solving an algebraic system of linear/nonlinear equations. It is worth noting that eigenfunctions of the singular Sturm–Liouville problems can be utilized with high order of accuracy to approximate any smooth function [32]. This useful property of such functions is often called the (exponential) spectral accuracy. The Chebyshev polynomials are one of the main classes of orthogonal polynomials which have been successfully used in various areas, e.g. [33,34,35,36,37].
Since, as far as we know, there is no previous study related to the nonlinear Ginzburg–Landau equation involved with fractal–fractional derivative operator. The main aims of this work is to introduce nonlinear time fractal–fractional Ginzburg–Landau equation and to propose a computational method based on the shifted Chebyshev polynomials (S-CPs) for its numerical solution. Therefore, we focus on the following problem:
on the domain \((x,t)\in [0,1]\times [0,1]\) with the initial condition
and the boundary conditions
where \( i=\sqrt{-1} \) is the unit imaginary number, \( \Theta \) is an undetermined complex function, g, h and z are complex functions, \( \psi \) and \(\sigma \) are real functions, and \( \vartheta \), \( \eta \), \(\kappa \) and \( \xi \) are known constants. Here, \({}^{\text {FFM}}{0}{D_{t}^{\alpha ,\beta }}\) denotes the fractal–fractional partial differentiation operator of order \((\alpha ,\beta )\) (where \(\alpha ,\beta \in (0,1)\)) in the Atangana–Riemann–Liouville sense with Mittag–Leffler non-singular kernel [38, 39].
In the proposed method, solving the above fractal–fractional problem is changed to solving a system of algebraic equations. To this end, first, the function \(\Theta (x,t)\) is decomposed into its real and imaginary parts. Then, these parts are expanded by the S-CPs with undetermined coefficients and substituted into the nonlinear fractal–fractional differential equation introduced in Eq. (1.1) and the conditions expressed in Eqs. (1.2)–(1.3). Finally, the operational matrix (OM) of fractal–fractional derivative and the collocation scheme are utilized to extract an algebraic system of nonlinear equations. The method is mainly privileged, because of the special properties of the S-CPs. Note that the above-mentioned OM is obtained for the first time in the present paper, which can also be used on other kinds of fractal–fractional differential equations.
This work includes the following sections: Sect. 2 briefly reviews the fractal–fractional calculus. Sect. 3 provides the S-CPs and some relevant results. The OM of fractal–fractional differentiation of the S-CPs is derived in Sect. 4. The presented approach is formulated in Sect. 5. Some numerical examples are examined in Sect. 6. Finally, in Sect. 7, the main conclusions of the study are highlighted.
2 Fractal–fractional calculus
In this section, some essential notions of the fractal–fractional calculus are briefly reviewed.
Definition 2.1
[10] The one- and two-parameter Mittag-Leffler functions are defined, respectively, by
and
Definition 2.2
[38, 39] The fractal–fractional derivative of order \((\alpha ,\beta )\) of the continuous function g(t) in the Atangana–Riemann–Liouville sense with Mittag-Leffler kernel is defined by
where \(\alpha ,\beta \in (0,1)\), \({\mathbf {C}}(\alpha )=1-\alpha +\dfrac{\alpha }{\Gamma \left( \alpha \right) }\) and
Remark 1
[38, 39] The above definition can be represented as follows:
Lemma 2.3
Let \(\alpha ,\beta \in (0,1)\) and \(k\in {\mathbb {N}}\). Then, we have
Proof
According to Remark 1, the proof is straightforward. \(\square \)
3 Shifted Chebyshev polynomials (S-CPs)
An \((n+1)\)-set of the S-CPs can be defined over [0, 1] by the following formula [40]:
where
These basis polynomials are orthogonal with respect to the weight functions \(w(t)=\frac{1}{\sqrt{t-t^{2}}}\) with the following condition:
where \(\delta \) is Kronecker’s delta, and \(\gamma _{0}=2\) and \(\gamma _{i}=1\) for \(i\ge 1\). So, any function \(g(t)\in L^{2}_{w}[0,1]\) can be expressed by these polynomials as follows:
where
and
In a like way, any function \(u(x,t)\in L^{2}_{w}([0,1]\times [0,1])\) can be expressed by the S-CPs as follows:
where \({\mathbf {U}}=[u_{ij}]\) is an \((n+1)\)-order square matrix with entries
Note that the derivative of the vector \(\Phi _{n}(t)\) can be expressed by
where \({\mathbf {D}}^{(1)}=[d_{ij}^{(1)}]\) is an \((n+1)\)-order matrix (called the differentiation OM of the S-CPs), and has the following entries:
Generally, the OM of r times differentiation of \(\Phi _{n}(t)\) can be expressed as follows:
where \(\mathbf{D }^{(r)}\) is obtained by r times multiplying \(\mathbf{D }^{(1)}\) in itself.
4 Operational matrix (OM) of fractal–fractional derivative
In this section, we derive the OM of fractal–fractional derivative for the S-CPs.
Theorem 4.1
Let \(\Phi _{n}(t)\) be the vector expressed in Eq. (3.5) and \(\alpha ,\,\beta \in (0,1)\) be two real constants. The fractal–fractional derivative of order \((\alpha ,\beta )\) of this vector in the Atangana–Riemann–Liouville sense can be expressed by
where \({\mathbf {P}}^{(\alpha ,\beta )}=[p^{(\alpha ,\beta )}_{ij}]\) is an \((n+1)\)-order matrix (called the fractal–fractional derivative OM of the S-CPs), and its elements are given by
and for \(i=2,3,\ldots ,n+1\),
in which the coefficients \(a_{(i-1)k}\) and \(a_{(j-1)l}\) are previously introduced in Eq. (3.2).
Proof
From Eq. (3.1) and Lemma 2.3, we have
The above relation can be expressed by the S-CPs as follows:
where
From Eq. (3.1) and the above relation, we have
Definition 2.1 and Eq. (4.4) result in
Hence, from Eqs. (4.2)–(4.5), we obtain
where
Besides, from Eq. (3.1) and the linear property of the fractal–fractional derivative operator, we have
Lemma 2.3 and the above relation yield
Approximating the elements of the above relation by the S-CPs yields
where
From Eq. (3.1), we have
On the other hand, by considering Definition 2.1, we obtain
and
Therefore, from Eqs. (4.8)–(4.9), we obtain
where
Thus, by change of the indexes \(i={\hat{i}}+1\) and \(j={\hat{j}}+1\) in Eqs. (4.7)–(4.10), the proof is completed. \(\square \)
Remark 2
Note that to do numerical computations often a few terms of the infinite series expressing two parameters Mittag-Leffler function, and consequently, a few terms of the infinite series in the above theorem is utilized. Throughout the paper, the first 30 terms of this series is used.
As an illustrative example, for \(n=5\) and \((\alpha ,\beta )=(\frac{1}{2},\frac{1}{4})\), we have
5 The proposed method
To solve the fractal–fractional problem introduced in Eqs. (1.1)–(1.3), we first decompose the complex functions of the problem in their real and imaginary parts as follows:
where u(x, t), v(x, t) and \(f_{i}(x,t)\), \(g_{i}(x)\), \(h_{i}(t)\), \(z_{i}(t)\) for \(i=1,2\) are real functions. Therefore, the mentioned problem can be represented into a coupled system of nonlinear fractal–fractional differential equations as follows:
with the initial conditions
and the boundary conditions
Now, we approximate the real and imaginary parts of the solution of the problem by the S-CPs as follows:
where \({\mathbf {U}}=[u_{ij}]\) and \({\mathbf {V}}=[v_{ij}]\) are (n+1)-order undetermined square matrices, and \(\Phi _{n}(.)\) is in accordance with Eq. (3.5). From Theorem 4.1, we have
Also, two times derivative with respect to x on both sides of Eq. (5.5) yields
Substituting Eqs. (5.5)–(5.7) into Eq. (5.2) gives
Meanwhile, the functions given in Eqs. (5.3) and (5.4) can be expressed by the S-CPs as follows:
and
where \(G_{i}\), \(H_{i}\) and \(Z_{i}\) for \(i=1,2\) are known vectors. Hence, from Eqs. (5.5), (5.9) and (5.10), and the initial and boundary conditions expressed in Eqs. (5.3) and (5.4), the following relations can be extracted:
and
Eventually, from Eqs. (5.8), (5.11) and (5.12), a system of \(2(n+1)^{2}\) algebraic equations can be extracted as follows:
where \(\zeta _{k}=\frac{1}{2}\left( 1-\cos \left( \frac{(2k-1)\pi }{2(n+1)}\right) \right) \) for \(k=1,2,\ldots ,n+1\) is the k-th root of the shifted Chebyshev polynomial of \((n+1)\)-th degree on [0, 1]. The above algebraic system should be solved due to compute the unknown matrices \({\mathbf {U}}\) and \({\mathbf {V}} \) in Eq. (5.5), and consequently to obtain an approximate solution for the problem.
6 Numerical examples
In this section, some numerical examples are solved using the method presented in Sect. 5. Note that Maple 17 via 20 digits precision is utilized for numerical implementations. The convergence order (C-order) of the proposed scheme is calculated by
where \(\varepsilon _{1}\) and \(\varepsilon _{2}\) are, respectively, the first and the second values of the maximum absolute error (MA-error) appearing in the presented method. Also, \((n_{i}+1)^{2}\) for \(i=1, 2\) is the S-CPs number utilized in the ith implementation.
Example 1
Consider the nonlinear time fractal–fractional Ginzburg–Landau equation
where
with the homogeneous initial condition and the following boundary conditions:
The analytic solution of this example is
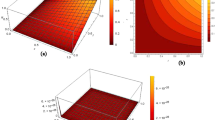
The method presented in Sect. 5 with some values n is used for solving this example. The values of the MA-error and the C-order of the real and imaginary parts of the solution for some selections \((\alpha ,\beta )\) are summarized in Tables 1 and 2. Figures of the approximate solution (AS) and the corresponding absolute error (AE) function for the real and imaginary parts in the case of \(n=8\), where \((\alpha =0.25,\beta =0.25)\) are illustrated, respectively, in Figs. 1 and 2. The reported results clarify that one can get excellent results by applying only a few number of the S-CPs. Moreover, applying more basis functions improves the accuracy rapidly.

Plots of the S-CPs solution and the AE function (respectively left and right) for the real part where \((\alpha =0.25,\beta =0.25)\) and \(n=8\) in Example 1

Plots of the S-CPs solution and the AE function (respectively, left and right) for the imaginary part where \((\alpha =0.25,\beta =0.25)\) and \(n=8\) in Example 1
Example 2
Consider the nonlinear time fractal–fractional Ginzburg–Landau equation
where
with the homogeneous initial condition and the following boundary conditions:
The analytic solution of this example is
The established method with some values n is applied for the numerical solution of this example. The values of the MA-error and the C-order of the real and imaginary parts of the solution for some selections \((\alpha ,\beta )\) are given in Tables 3 and 4. Figures of the AS and the corresponding AE function for the real and imaginary parts in the case of \(n=8\), where \((\alpha =0.45,\beta =0.35)\) are shown, respectively, in Figs. 3 and 4. From the reported results, it can be seen that applying more terms of the S-CPs provides numerical results with high accuracy. Moreover, it can be seen that by increasing the number of the S-CPs the approximate solutions tend to the exact solutions of the problem with high order of accuracy. Note that the first ten terms of the series appeared in the right-hand side are used for the numerical simulations. This assumption also is utilized in the next example.

Plots of the S-CPs solution and the AE function (respectively, left and right) for the real part where \((\alpha =0.45,\beta =0.35)\) and \(n=8\) in Example 2

Plots of the S-CPs solution and the AE function (respectively, left and right) for the imaginary part where \((\alpha =0.45,\beta =0.35)\) and \(n=8\) in Example 2
Example 3
Consider the nonlinear time fractal–fractional Ginzburg–Landau equation
where
with the homogeneous initial condition and the following boundary conditions:
The analytic solution of this example is
The presented method with some values n is used for solving this example. The values of the MA-error and the C-order of the real and imaginary parts of the solution for some selections \((\alpha ,\beta )\) are reported in Tables 5 and 6. Plots of the AS and the corresponding AE function for the real and imaginary parts in the case of \(n=8\), where \((\alpha =0.80,\beta =0.55)\) are shown in Figs. 5 and 6, respectively. The achieved results evidently show that the approach is efficient and reliable for this example.

Plots of the S-CPs solution and the AE function (respectively left and right) for the real part where \((\alpha =0.80,\beta =0.55)\) and \(n=8\) in Example 3

Plots of the S-CPs solution (left) and the AE function (right) for the imaginary part where \((\alpha =0.80,\beta =0.55)\) and \(n=8\) in Example 3
7 Conclusion
In this paper, a novel class of nonlinear Ginzburg–Landau equation has been introduced. The fractal–fractional derivative in the Atangana–Riemann–Liouville sense with Mittag-Leffler non-singular kernel utilized to express this new class. An accurate scheme based on the shifted Chebyshev polynomials (S-CPs) proposed for the numerical solution of this class of problems. To design the proposed method, a novel operational matrix of fractal–fractional differentiation constructed for the S-CPs. This matrix and the collocation method have been mutually applied to change the original problem to a system of nonlinear algebraic equations. The established method applied on several numerical examples. The yielded results confirm the high accuracy of the proposed approach.
References
Atangana A (2016) Derivative with two fractional orders: a new avenue of investigation toward revolution in fractional calculus. Eur Phys J Plus 131:373
Atangana A (2018) Non validity of index law in fractional calculus: a fractional differential operator with Markovian and non-Markovian properties. Phys A 505:688–706
Hosseininia M, Heydari MH, Roohi R, Avazzadehd Z (2019) A computational wavelet method for variable-order fractional model of dual phase lag bioheat equation. J Comput Phys 395:1–18
Roohi R, Heydari MH, Sun HG (2019) Numerical study of unsteady natural convection of variable-order fractional Jeffrey nanofluid over an oscillating plate in a porous medium involved with magnetic, chemical and heat absorption effects using Chebyshev cardinal functions. Eur Phys J Plus 134:535
Engheta N (1996) On fractional calculus and fractional multipoles in electromagnetism. Antennas Propag 44:554–566
Kulish VV, Lage JL (2002) Application of fractional calculus to fluid mechanics. J Fluids Eng 124(3):803–806
Bagley RL, Torvik PJ (1985) Fractional calculus in the transient analysis of viscoelastically damped structures. AIAA J 23:918–925
Lederman C, Roquejoffre JM, Wolanski N (2004) Mathematical justification of a nonlinear integrodifferential equation for the propagation of spherical flames. Annali di Matematica 183:173–239
Meral FC, Royston TJ, Magin R (2010) Fractional calculus in viscoelasticity: an experimental study. Commun Nonlinear Sci Numer Simul 15:939–945
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Oldham KB, Spanier J (1974) The fractional calculus. Academic Press, New York
Baleanu D, Diethelm K, Scalas E, Trujillo JJ (2012) Fractional calculus models and numerical methods, series on complexity, nonlinearity and chaos. World Scientific, Boston
Diethelm K, Ford NJ (2002) Analysis of fractional differential equations. J Math Anal Appl 265:229–248
Wess W (1996) The fractional diffusion equation. J Math Phys 27:2782–2785
Langlands TAM, Henry BI (2005) The accuracy and stability of an implicit solution method for the fractional diffusion equation. J Comput Phys 205(2):719–736
Heydari MH, Hooshmandasl MR, Mohammadi F (2014) Legendre wavelets method for solving fractional partial differential equations with Dirichlet boundary conditions. Appl Math Comput 234:267–276
Heydari MH, Hooshmandasl MR, Mohammadi F, Cattani C (2014) Wavelets method for solving systems of nonlinear singular fractional Volterra integro-differential equations. Commun Nonlinear Sci Numer Simul 19:37–48
Heydari MH, Hooshmandasl MR, Cattani C (2016) Numerical solution of fractional sub-diffusion and time-fractional diffusion-wave equations via fractional-order Legendre functions. Eur Phys J Plus 131:268–290
Heydari MH (2019) Numerical solution of nonlinear 2D optimal control problems generated by Atangana–Riemann–Liouville fractal–fractional derivative. Appl Num Math. https://doi.org/10.1016/j.apnum.2019.10.020
Aranson IS, Kramer L (2002) The world of the complex Ginzburg–Landau equation. Rev Mod Phys 74:99–143
Goyal A, Alka, Raju T S, Kumar C N (2012) Lorentzian-type soliton solutions of AC-driven complex Ginzburg–Landau equation. Appl Math Comput 218:11931–11937
Li B, Zhang Z (2015) A new approach for numerical simulation of the time-dependent Ginzburg–Landau equations. J Comput Phys
Yana Y, IraMoxley F, Dai W (2015) A new compact finite difference scheme for solving the complex Ginzburg–Landau equation. Appl Math Comput 260:269–287
Lopez V (2018) Numerical continuation of invariant solutions of the complex Ginzburg–Landau equation. Commun Nonlinear Sci Numer Simulat 61:248–270
Shokri A, Bahmani E (2018) Direct meshless local Petrov-Galerkin (DMLPG) method for 2D complex Ginzburg–Landau equation. Eng Anal Bound Elements 1–9
Wang P, Huang C (2016) An implicit midpoint difference scheme for the fractional Ginzburg–Landau equation. J Comput Phys 312(1):31–49
Li M, Huang C, Wang N (2017) Galerkin finite element method for the nonlinear fractional Ginzburg–Landau equation. Appl Num Math 118:131–149
Wang N, Huang C (2018) An efficient split-step quasi-compact finite difference method for the nonlinear fractional Ginzburg–Landau equations. Comput Math Appl 75(7):2223–2242
Zeng W, Xiao A, Li X (2019) Error estimate of Fourier pseudo-spectral method for multidimensional nonlinear complex fractional Ginzburg–Landau equations. Appl Math Lett
Heydari M H, Hooshmandasl M R, Maalek Ghaini F M (2014) An efficient computational method for solving fractional biharmonic equation. Comput Math Appl 68(9):269–287
Heydari MH, Avazzadeh Z, Mahmoudi MR (2019) Chebyshev cardinal wavelets for nonlinear stochastic differential equations driven with variable-order fractional Brownian motion. Chaos Solitons Fractals 124:105–124
Canuto C, Hussaini M, Quarteroni A, Zang T (1988) Spectral methods in fluid dynamics. Springer, Berlin
Xu X, Zhang CS (2019) A new estimate for a quantity involving the Chebyshev polynomials of the first kind. J Math Anal Appl 476:302–308
Pereira M, Desassis N (2019) Efficient simulation of Gaussian Markov random fields by Chebyshev polynomial approximation. Spat Stat 31:100359
Kumar S, Piret C (2019) Numerical solution of space-time fractional PDEs using RBF-QR and chebyshev polynomials. Appl Num Math 143:300–315
Heydari MH (2019) A direct method based on the Chebyshev polynomials for a new class of nonlinear variable-order fractional 2D optimal control problems. J Franklin Inst (in press)
Roohi R, Heydari MH, Bavi O, Emdad H (2019) Chebyshev polynomials for generalized couette flow of fractional Jeffrey nanofluid subjected to several thermochemical effects. Eng Comput. https://doi.org/10.1007/s00366-019-00843-9
Atangana A (2017) Fractal-fractional differentiation and integration: connecting fractal calculus and fractional calculus to predict complex system. Chaos, Solitons Fractals 102:396–406
Atangana A, Qureshi S (2019) Modeling attractors of chaotic dynamical systems with fractal–fractional operators. Chaos Solitons Fractals 123:320–337
Khader MM (2011) On the numerical solutions for the fractional diffusion equation. Commun Nonlinear Sci Numer Simulat 16:2535–2542
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Heydari, M.H., Atangana, A. & Avazzadeh, Z. Chebyshev polynomials for the numerical solution of fractal–fractional model of nonlinear Ginzburg–Landau equation. Engineering with Computers 37, 1377–1388 (2021). https://doi.org/10.1007/s00366-019-00889-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-019-00889-9