
Abstract
The performance characteristics and temperature field of conducting–convecting–radiating annular fin are investigated. The nonlinear variation of thermal conductivity, power law dependency of heat transfer coefficient, linear variation of surface emissivity, and heat generation with the temperature are considered in the analysis. A semi-analytical approach, homotopy perturbation method is employed to solve the nonlinear differential equation of heat transfer. The analysis is presented in non-dimensional form, and the effect of various non-dimensional thermal parameters such as conduction–convection parameter, conduction–radiation parameter, linear and nonlinear variable thermal conductivity parameter, emissivity parameter, heat generation number and variable heat generation parameter are studied. For the correctness of the present analytical solution, the results are compared with the results available in the literature. In addition to forward problem, an inverse approach namely differential evolution method is employed for estimating the unknown thermal parameters for a given temperature field. The temperature fields are reconstructed using the inverse parameters and found to be in good agreement with the forward solution.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The advancement in engineering and technology is taking place day by day whether it is mechanical, electrical, or electronics, etc. But, along with this advancement the important concern is about the heat dissipation from the equipment whether it is mechanical machines such as IC engine, heat exchanger, etc. or electrical transformer, or electronics equipment such as mobile, computer, etc. There are several ways for heat dissipation. Out of which, the extended surfaces are widely used to enhance the heat transfer in a variety of heat exchanging devices [1, 2].
In last few decades, a substantial amount of research has been conducted for the enhancement of heat transfer through extended surfaces. For this purpose, various types of extended surfaces are studied. Mokheimer [3] studied the effect of variable heat transfer coefficient on the performance of annular fins with different profiles. In his study, the deviation in the results among the constant and variable heat transfer coefficient was reported. Zubair et al. [4] considered the effect of temperature dependent thermal conductivity on the optimal dimensions of circular fin with variable profile. Yu and Chen [5] studied the optimization of circular fin with temperature dependent thermal conductivity and heat transfer coefficient. In his analysis, the non-linear heat transfer equation was solved by differential transformation method (DTM).
The performance and optimum dimensions of three types of cooling fins was examined by Kalman and Laor [6]. Cihat Arslanturk [7] proposed correlation equations which are useful to design engineers for optimum design of an annular fin with temperature dependent thermal conductivity. Khan and Zubair [8] investigated the convecting–radiating circular fin with variable profile. Temperature dependent thermal conductivity and heat transfer coefficient were taken into account. The idea of their study was either for a given amount of heat dissipation the volume of the fin was minimized or for a given volume the heat dissipation was maximized. The Adomian’s double decomposition method was applied by Chiu and Chen [9] for the study of temperature distribution and then estimates the stress field in circular fin with variable thermal conductivity. The differential quadrature element method was applied to a convective-radiative fin with variable thermal conductivity by Malekzadeh et al. [10]. They showed that the method is computationally efficient and having good convergence rate with high accuracy.
Very recent, a hybrid numerical method i.e. combination of differential transformation and finite difference method was applied by Peng and Chen [11] for solving the heat transfer equation of an annular fin with temperature dependent thermal conductivity. Their model demonstrates that the heat dissipation from surface to surrounding occurs simultaneously by convection and radiation. The effects of all the thermal parameters such as heat transfer coefficient, absorptivity, emissivity, and thermal conductivity on temperature distribution were discussed. Aksoy [12] employed homotopy analysis method (HAM) to study the effect of variable heat transfer coefficient and variable thermal conductivity parameter on the thermal performance of an annular fin. Although in all the above cases, the heat generation was ignored. This assumption is reasonable when the fin is not used at very high temperature. However, there are many situations when the internal heat generation cannot be ignored during the heat transfer processes. Recently, Aziz and Bouaziz [13] attempt to solve the nonlinear heat transfer equation for a longitudinal fin with variable thermal conductivity and heat generation using least squares method. It was observed that the internal heat generation to some extent influenced by the temperature distribution and efficiency. Georgiou and Razelos [14] considered internal heat generation in the performance study of a convective annular fin with trapezoidal profile. They showed that the heat convection ability in the fin reduces due to internal heat generation. Few authors consider the temperature dependent heat generation parameter which is more realistic [15, 16].
To minimize the mathematical complexity, most of the researcher either assume constant thermal parameters or consider partial mode of heat transfer in the analysis of a fin. This type of simplification is applicable for particular applications and turn away from the real situation of heat transfer problem. In reality, the heat transfer through fin material involves all the thermal parameters which are generally temperature dependent. In the recent year, Torabi and Zhang [17] have presented differential transformation technique to study the conducting-convecting–radiating straight fin with all temperature dependent thermal parameters. Similar study was carried out by Singh and Das [18] for straight and annular fin without considering the heat generation. However, in both the cases the correctness of their forward solutions was not properly attempted. Recently, Sun et al. [19] employed collocation spectral method for analyzing the convective–radiative fin with temperature dependent thermal properties. Lagrange interpolation polynomial was used to approximate the temperature distribution. The affect of all the parameters on the performance of the fin were found to be motivating for further research.
In the present advances of technological revolution, industry needs high performance heat transfer equipment with progressively low weight, compact and cost effective design. Thus, apart from forward solution, the inverse analyses are also overwhelming and encouraging. Das [20] used simplex search method to solve inverse problem for estimating the unknown thermal parameters of a straight fin. The accuracy of the estimated parameters was studied for the effect of measurement errors, initial guess and number of measurement points. Later Mallick and Das [21] estimated the unknown thermo-mechanical parameters of an annular fin subjected to thermal stresses using an inverse approach. Their inverse analyses were limited to conductive–convective annular fin only, and the internal heat generation and radiation were ignored.
The main motivation of the present study is to address the real situation of heat transfer in which all the temperature dependent thermal parameters such as conduction, convection, radiation and heat generation parameter are taken into account. Open literature search reveals that homotopy perturbation method (HPM) is not yet applied to the study of annular fin involving all thermal parameters. The closed form solution for highly nonlinear engineering problem is difficult, but has a great significance and challenge to the researchers as it gives better insight into the nature of the problem and understanding. In this work, an annular fin with rectangular profile is considered which is having wide industrial applications such as from compact heat exchanger to small electronic devices. The nonlinear differential equation of heat transfer is solved using HPM. This approximate analytical approach gives the forward solution for a temperature field. HPM has several advantages for dealing with nonlinear problem. It involves less approximation and convergences rapidly to the accurate solutions as compared to other method such as ADM, DTM, HAM and conventional perturbation. The affects of various thermal parameters on temperature distribution are studied. In addition to that an inverse analysis using differential evolution (DE) has been carried out to estimate the unknown thermal parameters.
2 Problem description
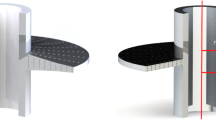
In fin analysis, the heat transfer involves two factors (1) the movement of the heat through the fin material by conduction and (2) fin exchanges heat with the surrounding either through convection or radiation alone or both. Consider a thin axisymmetric annular fin (Fig. 1) of base radius r i and tip radius r o having a constant thickness t. The base of the fin is subjected to a constant temperature T b , while the tip is considered to be well insulated. The heat is transferred to the surrounding by convection and radiation both. The radiation takes place at an effective sink temperature T s . The assumptions are to be considered that the fin is made of homogeneous material and subjected to the temperature dependent thermal parameters such as, thermal conductivity (k), heat transfer coefficient (h), surface emissivity (ε) and internal heat generation (q). The various thermal parameters are defined as follows:
where, k o is the thermal conductivity at the ambient temperature T a , h b is the convective heat transfer coefficient to the temperature difference T b − T a , ε s is the surface emissivity at the sink temperature T s , and q o is the internal heat generation parameter at ambient temperature T a . Parameters κ and γ are representing the variation of linear and nonlinear thermal conductivity, λ is the variation of surface emissivity, e is the variation of internal heat generation, and n is the exponent of variable convective heat transfer coefficient. For very small thickness and axisymetric nature of the problem, the heat flow through the fin material is assumed to be in radial direction only. Based on these assumptions, the steady state energy balance equation and the boundary conditions are given as,
where σ is the Stefan’s Boltzmann constant. For simplicity and wide area of applications, various entities are non-dimensionalised as follows:

Geometry of an annular fin
On substitution of non-dimensional terms, the energy balance equation and the boundary conditions are modified as,
3 Method of solution
The nondimensional steady state nonlinear heat transfer equation with variable thermal parameters is solved using HPM. In this method, homotopy in topology is coupled with regular perturbation for taking the full advantage of both homotopy and perturbation method. HPM do not require any small parameter which is one of the biggest constraint in the traditional perturbation method. The homotopy is constructed in such a way that it continuously deforms from one system to other system as the embedding or expanding parameter changes from 0 to 1 (0 ≤ p ≤ 1). This method is simple and straight forward for solving non-linear differential equation. The convergence rate of this method is very fast such that even less number of iteration shows much more accurate solution which is valid for the whole solution domain.
To illustrate the basic ideas of HPM and the completeness of the presentation, the He’s formulation is restated for a general nonlinear differential equation as follows [22, 23]:
with the boundary conditions,
where L and N are the linear and nonlinear operator, f(r) is a known analytical function, B is the boundary operator, and Γ is the boundary of the domain Ω.Now, construct homotopy for a given nonlinear differential equation as,
where \(L = \frac{{d^{2} }}{{d\xi^{2} }},\) p∈[0, 1] is an embedding parameter which changes monotonically from zero to 1, θ o is an initial approximation and θ is the temperature distribution which is the function of ξ. Following HPM, the nondimensional heat transfer equation (Eq. 4a) can be written as,
The solution of Eq. 8 can be approximated in the form of power series p such as,
Substituting the value of θ into Eq. 8 and equating the coefficients of the like powers of p, one has:
with the following boundary conditions,
The values of θ 0, θ 1 and θ 2 are obtained by solving Eq. 10 and using the proper boundary conditions as mentioned in Eq. 11. For p → 1, the approximate solution for temperature field is,
where,
4 Fin efficiency
The performance of a fin is measured in terms of efficiency. The efficiency of a fin is defined as the ratio of actual heat transfer through the fin to the heat transfer if the fin is isothermal. The heat transfer rate from the fin is given as,
The ideal heat transfer is obtained when the entire fin is considered to be at base temperature. Thus, the ideal heat transfer can be expressed as,
The fin efficiency is given as,
5 Differential evolution method
There are several optimization techniques to deal with the inverse analysis of various type of engineering problem. All of them having their own merits and demerits. A new heuristic parallel direct search method known as differential evolution (DE) is used for inverse analysis in the present problem. Price and Storn [24] proposed a vector population based stochastic method to handle the Chebyshev polynomial and later used for varieties of nonlinear problem. This method has several advantages like fast convergence by using only few control parameters and finding the true global minimum regardless the values of initial parameters. The population size in DE is considered N p parameter vectors for each generation and it does not change during the minimization process. It involves three processes (1) mutation, (2) crossover and (3) selection ratio. For example, let us consider a i-th member, x i,G from the population of G-th generation. The mutation process for this affiliate can be expressed as follows:
where, r 1, r 2, r 3 ∈ {1, 2, 3, ……, N p } are randomly chosen integers. In DE, the weighted difference of two random population vectors is added to the base vector. In Eq. 16, C m is referred to as the mutation probability (differential weight) which controls the differential amplification of the weighted difference of two random population vectors. Parameter \(x_{r1}\) is the best member of the, i-th population for which the value of the relevant objective function is the least. Crossover increases the diversity of the perturbed parameter vectors. The crossover constant, C R , is selected between 0 and 1 which depends on the user. In crossover, the random parameter vector is generated by combining elements of the parent vector and the trail vector and if the random parameter is less than the crossover probability, then that particular solution is subjected to crossover. In general, the entire population in the next iteration is stimulated by the best member of the current population in some or other manner. In the present work C m is taken as 1.0 and C R as 0.5.
In manufacturing of heat transfer equipment, the inverse estimation of various parameters for better performance along with cost-effective design is becoming quite popular. The objective of this work is to inversely predict the thermal parameters for a conductive–convecting–radiating annular fin. The reference temperature field is obtained from HPM based forward solution of heat transfer equation. Following objective function is considered to estimate the unknown parametersβ, β 1 , N, M, λR, G and E G :
where p is the number of points at which temperatures are measured, θ j is the temperature field obtained from the forward solution and \(\bar{\theta }_{j}\) is the guessed temperature field for a parameter vector in the solution space. In practice, the measurements of the temperature field cannot be fully error free. Thus, the inverse parameters are also estimated in consideration with arbitrary measurement errors. The objective function for temperature field associated with the measurements error can be expressed as,
6 Results and discussion
Results are presented for an annular fin where all the thermal parameters are considered to be a function of local temperature. The study is mainly focused on an approximate closed form solution for temperature field and the inverse estimation of unknown parameters for a given temperature field. A novel mathematical technique, HPM is used to solve the nonlinear heat transfer equation. For verifying the correctness of present HPM solution for temperature field, results are compared with the available literature results in Table 1. A comprehensive literature review exposed that only Das et al. [18] employed ADM for the analysis of an annular fin with all variable thermal parameters without the consideration of internal heat generation. Similar analysis with internal heat generation was performed by Torabi et al. [17] using DTM for straight fin only. Both the methods are cumbersome and give slow convergence as compare to HPM solution. Moreover, the validation of their forward solution is performed considering radiation parameter and heat generation is equal to zero. This partial validation cannot give the guarantee to the correctness of their forward solution when radiation and heat generation is involved in the heat transfer process. For the completeness of the validation, the present results are compared separately with (I) convective-conductive fin with nonlinear convective heat transfer coefficient, (II) convective-conductive fin with internal heat generation and (III) radiative fin with variable thermal conductivity. In all the cases, proposed method results give excellent agreement with the results available in literature. The maximum difference between the proposed method and methods in literature is about only 2.91 %. Furthermore, the present HPM result for temperature field is compared with the finite difference (FD) result in Fig. 2, where all the thermal parameters are taken into consideration. Relaxation method was employed to obtain the FD solution following the algorithm of Young and Mohlenkamp [25, Ch. 34]. In FD solution, 10 points are discretized and the result converges to the HPM result at about 140 iterations.

Comparison of proposed HPM results with FD solution for temperature field
For wide application of the problem, all parameters are simplified into non-dimensional form. To illustrate the present closed form solution, unless mentioned otherwise the values of non-dimensional parameters, β = 0.3, β 1 = 0.3, N = 0.5, M = 0.5, λ R = 0.2, G = 0.4, E = 0.4, n = 2.0 and R = 2 are considered in the analysis.
In most of the fin analysis research, to minimize mathematical complexity only linear dependency of thermal conductivity is considered. This consideration is quite acceptable only when the fin is operated at low temperature. At higher operating temperature, the thermal conductivity may vary nonlinearly. The effects of linear (β) and nonlinear (β 1) thermal conductivity parameter on the nondimensional temperature distribution along the outward radial direction are presented in Fig. 3. It can be seen that both the parameters individually influenced the temperature fields. With the increase of those parameters, the heat transfer rate through the fin material is increased. As a result, higher tip temperatures are observed. It can be noticed that the similar temperature fields are observed when both the parameters have same non-dimensional values, but acting alone. This is because of linear variation of non-dimensional temperature field with the linear and nonlinear thermal conductivity parameters as indicated in Eq. 12c. A detail comparison between the influence of β and β 1 are depicted in Table 2. Both the parameters independently play a significant role for changing the tip temperature. However, one parameter has the same effect as the other.

Effect of a linear and b nonlinear variable thermal conductivity parameter on the dimensionless temperature distribution as a function of dimensionless fin radius
The convective heat transfer coefficient between fin and its surrounding fluid depends on the Nusselt number which in turn is a function of Rayleigh number and Prandtl number of the system. For convective heat transfer, the Rayleigh number is certainly a function of change in temperature between the heater and surrounding. Thus, that the convective heat transfer coefficient is expected to be a function of temperature difference. In the present analysis, the convective heat transfer coefficient is considered to be varying with the ratio of temperature difference following power law. Figure 4 represents the effect of the variation of convective heat transfer coefficient. From Eq. 1, it can be seen that the convective heat transfer coefficient, h decreases with the increase in power of convective heat transfer coefficient, n. Hence, the positive values of n act against the convective heat transfer from the fin surface to the surrounding. As a result, higher local temperatures are observed with the increase of the power of convective heat transfer coefficient. The biot number (Bi) is an important parameter to describe the amount of heat transfer. The effect of non-dimensional conduction–convection parameter (N = Bi/t) on the temperature distribution is presented in Fig. 5. The parameter, N decreases with the increase of thermal conductivity which in turn heat transfer through the fin material increases with decrease of N.

Effect of nonlinear parameter, (n) describing the variation of convection coefficient on the dimensionless temperature distribution as a function of dimensionless fin radius

Effect of thermo-geometric parameter on the dimensionless temperature distribution as a function of dimensionless fin radius
Figure 6 shows that the radiation from the fin surface has significant effect on the heat transfer. The temperature dependent dimensionless radiation–conduction parameter (M) and the parameter describing the variation of surface emissivity (λ R ) changes the temperature distribution as shown in Fig. 6a, b. In consultation of the figures, it can be stated that in both the cases the tip temperature monotonically decreases with increase in M and λ R . The decrease of tip temperature is a result of continuous heat dissipation from the fin surface to the surrounding. For λ R = 0, the temperature distribution is influenced by the constant radiation–conduction parameter. Whereas, for M = 0, the temperature variation is independent from the radiation effect.

Effect of a variable radiative parameter (λ R ) and b convecting–radiating parameter (M) on the dimensionless temperature distribution as a function of dimensionless fin radius
Figure 7 illustrates how temperature field in the fin material is influenced by the internal heat generation. The temperature distribution for the different values of heat generation parameter (G) and the parameter describing the variation of heat generation (E G ) are shown in Fig. 7a, b respectively. It can be observed that the local temperature of the fin increases with the increase of those parameters. This result suggests that the tendency to convect heat from the fin surfaces is reduced by the heat generation. The comparison between Fig. 7a, b reveals that the parameter G has more profound effect as compare to the parameter E G .

Effect of a heat generation parameter (G) and b variable parameter describing the internal heat generation (E G ) on the dimensionless temperature distribution as a function of dimensionless fin radius
The efficiency is an important parameter for measuring the performance of a fin. Thus, the fin design cannot go through without the measurement of its efficiency. Figure 8 illustrates the variation of fin efficiency as a function of thermo-geometric parameter. Unless mention otherwise, the values of the parameters are same as taken for solid curves. The effect of various thermal parameters, β, β 1, n and M are also depicted in the figs. In general, the efficiency gradually decreases with the increase of parameter, N. However, slight deviation is observed in the variation of parameters n and M. The efficiency for different values of variable thermal conductivity parameters (β and β 1) is presented in Fig. 8a. The result shows that lower efficiency is associated with the lower values of the thermal conductivity parameters. The dependency of fin efficiency on the parameters β and n is presented in Fig. 8b. It can be seen that the efficiency decreases with decrease in parameter, β and it is more pronounced at the higher values of N. The nonlinear parameter, n describing the variation of convecting parameter has significant effect in the fin efficiency. The increase of conductive–radiative parameter, M reduces the fin efficiency as shown in Fig. 8c.

Fin efficiency as a function of thermo-geometric parameter, N: a effect of variable thermal conductivity parameters (β and β 1), b effect of parameter n, and c effect of conduction radiation parameter (M)
The thermal analysis of a fin for a given parameters are performed directly from the forward solution which is obtained by solving the energy balance equation, using suitable initial and boundary conditions. This type of solution is well-posed. However, the challenge is a cost effective and efficient fin designing which requires a good combination of various thermo-physical parameters. In order to estimate the various combinations of unknown thermo-physical parameters for a required temperature field, an inverse approach based on differential evolution (DE) method is employed. The inverse parameters are obtained using the forward solution for a given temperature field. This type of problems is mathematically ill-posed, because of small perturbation in the system may cause significant error in the estimated parameters. As one of the main objective of the present study is to predict the thermo-physical parameters for a predefined temperature field, the parameters, β, N, M, λR, G, and E G are to be estimated inversely. Unless mentioned otherwise the values of parameters β = 0.3, N = 0.5, M = 0.5, λR = 0.2, G = 0.4, and E G = 0.4 are considered in the forward solution for temperature field. Table 3 presents the inversely estimated values for three parameters, β, N and M within the specified upper bound and lower bound as mentioned in the table. It can be seen that the same tip temperatures are obtained for different combinations of, β, N and M values. The convergence histories of the present optimization obtained from the DE simulation and the iterative variation of the parameters, β, N and M for all the runs as mentioned in Table 3 are presented in Fig. 9. It can be seen that the function value, F converges with the increase of iterations in each cases. At the initial stage of the optimization, the values of the parameters are randomly adjusted to each other and gets stable at the later stage of the iteration. For the correctness of the present optimization, the temperature fields are reconstructed using the inverse parameters obtained from the different runs. The results are compared with the temperature field obtained from the forward solution as shown in Fig. 10. It can be seen that the reconstructed temperature fields almost coincide with the forward temperature field. This result suggests that the different fin material having parameters with these predicted values can be used to produce the same temperature field. Now, consider a large scale inverse where five unknown parameters, N, M, λR, G, and E G are to be estimated simultaneously. Table 4 shows the various combinations of inverse parameters obtained from the simulation for a given temperature field. The corresponding tip temperatures and their efficiencies are also estimated in the table. Very small deviation (maximum 2.6 %) in the tip temperatures and fin efficiency is observed. In Fig. 11, the plot of the reconstructed temperature fields versus direct temperature field give 45° lines, which suggest a very good agreement between the inverse and forward solution.

Convergence histories of DE simulation for predicting 3-unknown parameters β, N, and M and their iterative variations: a variations of objective function, b variations of parameter β, c) variations of parameter N and d variations of parameter M

Comparison between predicted and measured temperature distribution for 3-unknown parameters, β, N and M as mentioned in Table 3

Predicted temperature versus direct temperature field considering 5-unknown parameters, N, M, λ R , G, E G as mentioned in Table 4
It is well known that due to some local error, the experimental results slightly differ from the theoretical values. Thus, the estimation of inverse parameters considering random measurement errors in the forward solution has great significance. The simultaneous estimation of seven unknown thermo-mechanical parameters considering zero error and 15 % random error in the temperature field is presented in Table 5. The result suggests that for error free conditions the simulation converges very fast (about at 50 iteration) to reach the desired fitness value, whereas even after 200 iterations the simulation did not get fully converge when 15 % random error was considered in the reference temperature field. Using those inverse parameters, the temperature fields are reconstructed and compared with the forward temperature field with or without error consideration in Fig. 12. The reconstructed temperature fields exhibit reasonably good agreement within the prescribed domain of the temperature field. The tip temperatures obtained from the inverse parameters of Run-1 and Run-2 are very close to the direct one, whereas about 3.12 % error is found when 15 % random error is considered in the reference temperature field.

Comparison between predicted and measured temperature field considering zero and 15 % measurement error. In the simulation, 7-parameters, β, β 1, N, M, λ R , G and E G are considered as optimized parameter
7 Conclusions
This work employs a semi-analytical approach, homotopy perturbation method for obtaining an approximate solution of temperature distribution of an axisymmetric annular fin with linear and non-linear variable thermal parameters. In addition to this, the study also includes the inverse estimation of thermal parameters for a desired temperature field. The non-linear differential equation of conducting–convecting–radiating annular fin with temperature dependent thermal parameters is solved efficiently using HPM. For the aforesaid conditions, the HPM achieve very fast and accurate analytical solution that gives a very good agreement with the results available in the literature. It can be seen that the non-dimensional temperature fields are influenced by all the thermal parameters. The inverse solution characterized by a physical model using DE method presents a promising prospect to the fin designer. The inverse solution predicts various combinations of unknown parameters for a desired temperature field, and thus the ill-posed is observed. From the present study, following concluding remarks can be drawn:
-
The temperature distribution from base to tip of the fin has a strong dependency on the various thermal parameters. Higher tip temperature is observed when the values of the parameters, β, β 1, n, G and E G increases. However, their nature of influence on the tip temperature is completely different. The positive values of β and β 1 enhances the heat transfer from source to tip through conduction. Whereas, the parameters n, G and E G increases the convective heat transfer from source to surrounding.
-
The local temperature of the fin reduces with the increase of the parameters N, λR and M, and it is more pronounced at the tip.
-
The fin efficiency monotonically decreases with the increase of the parameters N and M, and enhanced with the increase of the parameter, β. However, a non-monotonic behaviour is observed with the parameter n.
-
The reconstructed temperature fields obtained from the multiple combinations of inverse parameters within the predefined range gives almost unique result and agrees very well with the reference temperature field.
-
The present DE based inverse model is capable to estimate a large number of unknown parameters and converges in short period of simulation time (about 50 iterations are required for seven unknown parameters).
Abbreviations
- r i , r o , t :
-
Inner radius, outer radius and thickness of the fin
- h(T):
-
Coefficient of convective heat transfer
- k(T):
-
Thermal conductivity
- k o , h b , q o , ε s :
-
Parameters describing the coefficients of thermal conductivity, convective heat transfer, internal heat generation and surface emissivity at ambient temperature
- κ, γ :
-
Parameters describing the linear and non-linear variation of thermal conductivity
- λ, e :
-
Parameters describing the variation of surface emissivity and internal heat generation
- β, β 1 :
-
Non-dimensional parameters describing the variation of linear and non-linear thermal conductivity parameter
- n :
-
Exponent of variable convective heat transfer coefficient
- N :
-
Non-dimensional thermo-geometric parameter, \(\left( {2hr_{i}^{2} /k_{o} t} \right)^{0.5}\)
- M :
-
Non-dimensional conduction-radiation parameter, \((2r_{i}^{2} \sigma \varepsilon_{s} T_{b}^{3} /k_{o} t)\)
- G :
-
Non-dimensional heat generation parameter, \(G = q_{o} r_{i}^{2} /k_{o} T_{b}\)
- E G :
-
Non-dimensional parameter describing the variation of heat generation
- T b :
-
Base temperature of fin
- T a :
-
Ambient temperature
- c 1, c 2, C 1, C 2 :
-
Constants of integration
- \(\xi\) :
-
Dimensionless radius of fin, \(\xi = \, \left( {r - r_{i} } \right)/r_{i}\)
- R :
-
Dimensionless outer radius ratio, R = r o /r i
- θ :
-
Dimensionless temperature, θ = (T − T a)/(T b − T a)
- p :
-
Imbedding parameter
- η :
-
Fin efficiency
- Q f :
-
Actual heat transfer
- Q max :
-
Maximum possible heat transfer
- F(ξ):
-
Objective function
References
Kraus AD, Aziz A, Welty JR (2002) Extended surface heat transfer. Wiley, New York
Sunden B, Heggs PJ (2000) Recent advances in analysis of heat transfer for fin type surfaces. WIT Press, Boston
Mokheimer EMA (2002) Performance of annular fins with different profiles subject to variable heat transfer coefficient. Int J Heat Mass Transf 45:3631–3642
Zubair SM, Al-Garni AZ, Nizami JS (1996) The optimal dimensions of circular fins with variable profile and temperature dependent thermal conductivity. Int J Heat Mass Transf 39(16):3431–3439
Yu LT, Chen CK (1999) Optimization of circular fins with variable thermal parameters. J Frankl Inst 336B:77–95
Laor K, Kalman H (1996) Performance and optimum dimensions of different cooling fins with a temperature dependent heat transfer coefficient. Int J Heat Mass Transf 39(9):1993–2003
Arslanturk C (2009) Correlation equations for optimum design of annular fins with temperature dependent thermal conductivity. Heat Mass Transf 45:519–525
Khan JM, Zubair SM (1999) The optimal dimensions of convective–radiating circular fins. Heat Mass Transf 35:469–478
Chiu CH, Chen CK (2002) Application of the decomposition method to thermal stresses in isotropic circular fins with temperature dependent thermal conductivity. Acta Mech 157:147–158
Malekzadeh P, Rahideh H, Karami G (2006) Optimization of convective–radiative fins by using differential quadrature element method. Energy Convers Manag 47:1505–1514
Peng HS, Chen CL (2011) Hybrid differential transformation and finite difference method to annular fin with temperature-dependent thermal conductivity. Int J Heat Mass Transf 54:2427–2433
Aksoy IG (2013) Thermal analysis of annular fins with temperature-dependent thermal properties. Appl Math Mech Engl Ed. 34(11):1349–1360
Aziz A, Bouaziz MN (2011) A least squares method for a longitudinal fin with temperature dependent internal heat generation and thermal conductivity. Energy Convers Manag 52:2876–2882
Georgiou E, Razelos P (1993) Performance analysis and optimization of convective annular fins with internal heat generation. Wfirme- und Stofffibertragung 28:275–284
Hosseini K, Daneshian B, Amanifard N, Ansari R (2012) Homotopy analysis method for a fin with temperature dependent internal heat generation and thermal conductivity. Int J Nonlinear Sci 14(2):201–210
Hatami M, Hasanpour A, Ganji DD (2013) Heat transfer study through porous fins (Si3N4 and Al) with temperature-dependent heat generation. Energy Convers Manag 74:9–16
Torabi M, Zhang QB (2013) Analytical solution for evaluating the thermal performance and efficiency of convective–radiative straight fins with various profiles and considering all non-linearities. Energy Convers Manag 66:199–210
Singh K, Das R Generalized inverse analysis for fins of different profiles with all temperature dependent parameters. Heat Mass Transf doi:10.1007/s00231-015-1676-2
Sun Y, Ma J, Li B, Guo Z (2016) Predication of nonlinear heat transfer in a convective–radiative fin with temperature-dependent properties by the collocation spectral method. Numer Heat Transf Part B Fundam 69:68–83
Das R (2011) A simplex search method for convective–conductive fin with variable conductivity. Int J Heat Mass Transf 54:5001–5009
Mallick A, Das R (2014) Application of simplex search method for predicting unknown parameters in an annular fin subjected to thermal stresses. J Thermal Stresses 37:236–251
He JH (1998) An approximate solution technique depending on an artificial parameter: a special example. Commun Nonlinear Sci Numer Simul 3(2):92–97
He JH (1999) Homotopy perturbation technique. Comput Methods Appl Mech Eng 178(3–4):257–262
Storn R, Prince K (1997) Differential evolution—a simple and efficient heuristic for global optimization over continuous spaces. J Glob Optim 11:341–359
Young T, Mohlenkamp M (2009) Introduction to numerical methods and matlab programming for engineers. Ohio University Department of Mathematics OH
Author information
Authors and Affiliations
Corresponding author
Additional information
An erratum to this article is available at http://dx.doi.org/10.1007/s00231-016-1913-3.
Rights and permissions
About this article

Cite this article
Ranjan, R., Mallick, A. & Prasad, D.K. Closed form solution for a conductive–convective–radiative annular fin with multiple nonlinearities and its inverse analysis. Heat Mass Transfer 53, 1037–1049 (2017). https://doi.org/10.1007/s00231-016-1872-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00231-016-1872-8