
Abstract
\(L^p\) boundedness of the circular maximal function \({\mathcal {M}}_{{\mathbb H}^1}\) on the Heisenberg group \({\mathbb H}^1\) has received considerable attentions. While the problem still remains open, \(L^p\) boundedness of \({\mathcal {M}}_{{\mathbb H}^1}\) on Heisenberg radial functions was recently shown for \(p>2\) by Beltran et al. (Ann Sc Norm Super Pisa Cl Sci. https://doi.org/10.2422/2036-2145.202001-006, 2021). In this paper we extend their result considering the local maximal operator \(M_{{\mathbb H}^1}\) which is defined by taking supremum over \(1<t<2\). We prove \(L^p\)–\(L^q\) estimates for \(M_{{\mathbb H}^1}\) on Heisenberg radial functions on the optimal range of p, q modulo the borderline cases. Our argument also provides a simpler proof of the aforementioned result due to Beltran et al.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 introduction
For \(d\ge 2\) the spherical maximal function is given by
where \(\mathbb {S}^{d-1}\subset {\mathbb {R}}^d\) is the \((d-1)\)-dimensional sphere centered at the origin and \(d\sigma \) is the surface measure on \({\mathbb {S}}^{d-1}\). When \(d\ge 3\), it was shown by Stein [21] that \({\mathcal {M}}_{{\mathbb R}^d} f\) is bounded on \(L^p\) if and only if \(p>\frac{d}{d-1}\). The case \(d=2\) was later settled by Bourgain [5]. An alternative proof of Bourgain’s result was subsequently found by Mockenhaupt, Seeger, Sogge [11], who used a local smoothing estimate for the wave operator. We now consider the local maximal operator
As is easy to see, the maximal operator \({\mathcal {M}}_{{\mathbb R}^d}\) can not be bounded from \(L^p\) to \(L^q\) unless \(p=q\). However, \(M_{{\mathbb R}^d}\) is bounded from \(L^p\) to \(L^q\) for some \(p<q\) thanks to the supremum taken over the restricted range [1, 2]. This phenomenon is called \(L^p\) improving. Almost complete characterization of \(L^p\) improving property of \(M_{{\mathbb R}^2}\) was obtained by Schlag [17] except for the endpoint cases. A different proof which is based on \(L^p\)–\(L^q_\alpha \) smoothing estimate for the wave operator was also found by Schlag and Sogge [18]. They also proved \(L^p\)–\(L^q\) boundedness of \(M_{{\mathbb R}^d}\) for \(d\ge 3\) which is optimal up to the borderline cases. Most of the left open endpoint cases were settled by the second author [8] but there are some endpoint cases where \(L^p\)–\(L^q\) estimate remains unknown though restricted weak type bounds are available for such cases. There are results which extend the aforementioned results to variable coefficient settings, see [18, 19]. Also, see [1, 4, 14] and references therein for recent extensions of the earlier results.
The analogous spherical maximal operators on the Heisenberg group \({\mathbb H}^n\) also have attracted considerable interests. The Heisenberg group \({\mathbb H}^n\) can be identified with \({\mathbb R}^{2n}\times {\mathbb R}\) under the noncommutative multiplication law
where \((x,x_{2n+1})\in {\mathbb {R}}^{2n}\times {\mathbb {R}}\) and A is the \(2n\times 2n\) matrix given by
The natural dilation structure on \({\mathbb {H}}^n\) is \(t(x,x_{2n+1})=(tx, t^2x_{2n+1})\). Abusing the notation, since there is no ambiguity, we denote by \(d\sigma \) the usual surface measure of \({\mathbb {S}}^{2n-1}\times \lbrace 0\rbrace \). Then, the dilation \(d\sigma _t\) of the measure \(d\sigma \) is defined by \(\langle f, d\sigma _t\rangle =\langle f(t\cdot ),d\sigma \rangle \). Thus, the average over the sphere is now given by
We consider the associated local spherical maximal operator
Similarly, the global maximal operator \({\mathcal {M}}_{{\mathbb H}^n}\) is defined by taking supremum over \(t>0\). As in the Euclidean case, \(L^p\) boundedness of \(M_{{\mathbb H}^n}\) is essentially equivalent to that of \({\mathcal {M}}_{{\mathbb H}^n}\) (for example, see [2] or Section 2.5). The spherical maximal operator on \({\mathbb H}^n\) was first studied by Nevo and Thangavelu [13]. It is easy to see that \( M_{{\mathbb H}^n}\) is bounded on \(L^p\) only if \(p>\frac{2n}{2n-1}\) by using Stein’s example ([21]):
where \(\phi _0\) is a cutoff function supported near the origin. For \(n\ge 2\), \(L^p\) boundedness of \( {\mathcal {M}}_{{\mathbb H}^n}\) on the optimal range was independently proved by Müller and Seeger [10], and by Narayanan and Thangavelu [12]. Furthermore, for \(n\ge 2\), Roos, Seeger and Srivastava[15] recently obtained the complete \(L^p\)–\(L^q\) estimate for \(M_{{\mathbb H}^n}\) except for some endpoint cases. Also see [7] for related results.
However, the problem still remains open when \(n=1\).
Definition
We say a function \(f: {\mathbb H}^1\rightarrow {\mathbb C}\) is Heisenberg radial if \(f(x,x_3)=f(Rx,x_3)\) for all \(R\in \mathrm{SO}(2)\).
Beltran, Guo, Hickman and Seeger [2] obtained \(L^p\) boundedness of \({\mathcal {M}}_{{\mathbb H}^1}\) on the Heisenberg radial functions for \(p>2\). In the perspective of the results concerning the local maximal operators [8, 15, 17, 18], it is natural to consider \(L^p\)–\(L^q\) estimate for \(M_{{\mathbb H}^1}\). The main result of this paper is the following which completely characterizes \(L^p\) improving property of \(M_{{\mathbb H}^1}\) on Heisenberg radial function except for some borderline cases.
Theorem 1.1
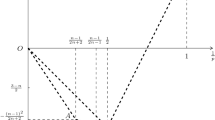
Let \(P_0=(0,0), P_1=(1/2,1/2),\) and \(P_2=(3/7,2/7)\), and let \(\mathbf {T}\) be the closed region bounded by the triangle \(\Delta P_0P_1P_2\). Suppose \((1/p,1/q)\in \lbrace P_0 \rbrace \cup (\mathbf {T}{\setminus } (\overline{P_1P_2}\cup \overline{P_0P_2}))\). Then, the estimate
holds for all Heisenberg radial function f. Conversely, if \((1/p,1/q)\notin \mathbf {T}\), then the estimate fails.
Though the Heisenberg radial assumption significantly simplifies the structure of the averaging operator, the associated defining function of the averaging operator is still lacking of curvature properties. In fact, the defining function has vanishing rotational and cinematic curvatures at some points, see [2] for a detailed discussion. This increases the complexity of the problem. To overcome the issue of vanishing curvatures, Beltran et al. [2] used the oscillatory integral operators with two-sided fold singularities and the variable coefficient version of local smoothing estimate [3] combined with additional localization.
The approach in this paper is quite different from that in [2]. Capitalizing on the Heisenberg radial assumption, we make a change of variables so that the averaging operator on the Heisenberg radial function takes a form close to the circular average, see (2.1) below. While the defining function of the consequent operator still does not have nonvanishing rotational and cinematic curvatures, via a further change of variables we can apply the \(L^p\)–\(L^q\) local smoothing estimate (see, Theorem 3.1 below) in a more straightforward manner by exploiting the apparent connection to the wave operator (see (2.2) and (2.3)). Consequently, our approach also provides a simplified proof of the recent result due to Beltran et al. [2]. See Sect. 2.5.
Even though we utilize the local smoothing estimate, we do not need to use the full strength of the local smoothing estimate in \(d=2\) since we only need the sharp \(L^p\)–\(L^q\) local smoothing estimates for (p, q) near (7/3, 7/2). Such estimates can also be obtained by interpolation and scaling argument if one uses the trilinear restriction estimates for the cone and the sharp local smoothing estimate for some large p (for example, see [9]).
The estimate (1.1) remains open when \((1/p,1/q)\in (\overline{P_1P_2}\cup \overline{P_0P_2}) {\setminus }\{ P_0, P_1\}\). However, we expect that those borderline cases should be true. Most of the corresponding endpoint estimates for the circular maximal function (in \({\mathbb {R}}^2\)) are known to be true [8], but to implement the approach in [8] we need the local smoothing estimate without \(\epsilon \)-loss regularity, which we are not able to establish yet even under the Heisenberg radial assumption.
We close the introduction showing the necessity part of Theorem 1.1.
Optimality of p, q range. We show (1.1) implies \((1/p,1/q)\in \mathbf {T}\), that is to say,
To see \(\mathbf{(a)}\), let \(f_R\) be the characteristic function of a ball of radius \(R\gg 1\), centered at 0. Then, \(M_{{\mathbb H}^1}f_R\) is also supported in a ball B of radius \(\sim R\) and \(M_{{\mathbb H}^1}f_R\gtrsim 1\) on B. Thus, \(\sup _{R>1}{\Vert M_{{\mathbb H}^1}f_R\Vert _q}/{\Vert f_R\Vert _p}\) is finite only if \(p\le q\). For \(\mathbf{(b)}\) let \(g_r\) be the characteristic function of a ball of radius \(r\ll 1\) centered at 0. Then, \(\vert M_{{\mathbb H}^1}g_r(x,x_3) \vert \gtrsim r\) when \((x,x_3)\) is contained in a \(c_0r-\)neighborhood of \(\lbrace (x,x_3):1<\vert x\vert <2, x_3=0 \rbrace \) for a small constant \(c_0>0\). Thus, (1.1) implies \( r^{1+{1}/{q}}\lesssim r^{{3}/{p}}\), which gives \(1+{1}/{q}\ge {3}/{p}\) if we let \(r\rightarrow 0\). Finally, to show \(\mathbf{(c)}\) we consider \(h_r\) which is the characteristic function of an \(r-\)neighborhood of \(\lbrace (x,x_3):\vert x\vert =1, x_3=0 \rbrace \) with \(r\ll 1\). Then, \(\vert M_{{\mathbb H}^1}h_r(x,x_3)\vert \gtrsim c>0\) when \((x,x_3)\) is in an \(r-\)ball centered at 0. Thus, (1.1) gives \(r^{3/{q}}\lesssim r^{2/{p}}\), which yields \(3/{q}\ge 2/{p}\).
The maximal estimate (1.1) for general \(L^p\) functions has a smaller range of p, q. Let \(h_r\) be a characteristic function of the set \(\lbrace (x,x_3) : |x_1-1|<r^2, |x_2|<r,|x_3|<r \rbrace \) for a sufficiently small \(r>0\). Then \(M_{{\mathbb H}^1}h_r (x,x_3)\sim r\) if \(-1\le x_1\le 0, |x_2|< cr, |x_3|<cr\) for a small constant \(c>0\) independent of r. Thus, (1.1) implies \(r^{1+2/{q}}\lesssim r^{{4}/{p}}\). It seems to be plausible to conjecture that (1.1) holds for general f modulo some endpoint cases as long as \(1+ {2}/{q}-4/{p}\ge 0\), \(3/{q}\ge {2}/{p}\), and \(1/{q}\le 1/{p}\). The range of p, q is properly contained in \(\mathbf {T}\).
2 Proof of Theorem 1.1
In this section we prove Theorem 1.1 while assuming Proposition 2.1 and Proposition 2.2 (see below), which we show in the next section.
2.1 Heisenberg radial function
Since f is a Heisenberg radial function, we have \( f(x,x_3)=f_0(|x|,x_3)\) for some \(f_0\). Let us set
Then, it follows \(f(x ,x_3)=g(|x|^2/{2},x_3)\). Since \(f*_{{\mathbb {H}}}d\sigma _t (r,0,x_3)=\int f(r-ty_1,-ty_2,x_3-try_2)d\sigma (y)=\int g(\frac{r^2+t^2}{2}-t ry_1,x_3-try_2)d\sigma (y)\), we have
Let us define an operator \({\mathcal {A}}_t\) by
Using Fourier inversion, we have
Since \(f*_{{\mathbb {H}}}d\sigma _t \) is also Heisenberg radial,Footnote 1\( \Vert M_{{\mathbb H}^1}f\Vert _q^q = \int |M_{{\mathbb H}^1} f(r,0,x_3)|^q rdrdx_3. \) A computation shows \(\Vert f\Vert _{L^p_{x, x_3}}=\Vert g\Vert _{L^p_{r,x_3}}\). Therefore, we see that the estimate (1.1) is equivalent to
In what follows we show (2.4) holds for p, q satisfying
Then, interpolation with the trivial \(L^\infty \) estimate proves Theorem 1.1.
2.2 Decomposition
Let \(\phi \) denote a positive smooth function on \({\mathbb R}\) supported in \([1-10^{-3}, 2 +10^{-3}]\) such that \(\sum _{j=-\infty }^\infty \phi (s/2^j)=1\) for \(s>0\). We set \(\phi _j(s)=\phi (s/2^j)\). To show (2.4) we decompose \({\mathcal {A}}_t\) as follows:
We break g via the Littlewood–Paley decomposition and try to obtain estimates for each decomposed pieces. For the purpose we denote \(\phi _{<j}=\sum _{\ell <j }\phi _\ell \) and \(\phi _{\,\ge j}=\sum _{\ell \ge j }\phi _\ell \) and define the projection operators
Our proof of (2.4) mainly relies on the following two propositions, which we prove in Sect. 3.
Proposition 2.1
Let \(|k|\ge 2\) and \(j\ge -k\). Suppose
Then, for \(\epsilon >0\) we have
The estimate (2.7) continues to be valid for the case \(k=-1,0,1\). However, the range of p, q for which (2.7) holds gets smaller.
Proposition 2.2
Let \(j\ge -1\) and \(k=-1,0,1\). Suppose \(p\le q\), \(1/{p}+1/{q}< 1\) and \(1/{p}+2/{q}> 1\). Then, for \(\epsilon >0\) we have
We frequently use the following elementary lemma (for example, see [8]) which plays the role of the Sobolev imbedding.
Lemma 2.3
Let I be an interval and let F be a smooth function defined on \(\mathbb {R}^n\times I\). Then, for \(1\le p\le \infty \),
2.3 Proof of (2.4)
We prove (2.4) handling the three cases \( k\le -2,\) \( |k|\le 1,\) and \( k\ge 2\), separately. We first consider a change of variables
which plays an important role in what follows. Note that
In order to show (2.4), we shall use the change of variables (2.8) to apply the local smoothing estimate to the averaging operator \({\mathcal {A}}_t\) (see Sect. 3.1). Since \(1<t<2\), \(|\det {\partial (y_1, y_2, \tau )} /{\partial (r,x_3,t)}|= |r^2-t^2|\sim \max (2^{2k}, 1)\) for \(|k|\ge 2\). Thus, the cases \(|k|\ge 2\) can be handled directly by using local smoothing estimates for the half wave propagator. However, the determinant of the Jacobian may vanish when \( |k|\le 1\). This requires further decomposition away from the set \(\{r=t\}\). See Sect. 3.3. This is why we need to consider the three cases separately.
Let us set \(g_k={\mathcal {P}}_{<-k}\,g\) and \(g^k= g- {\mathcal {P}}_{< -k}g\) so that \(g=g_k+g^k\). Then, we break
We use Propositions 2.1 and 2.2 to obtain the estimate for \( \phi _k(r){\mathcal {A}}_t g^k\), whereas we show the estimate for \(\phi _k(r){\mathcal {A}}_t g_k\) by elementary means using (2.2).
2.4 Case \(k\le - 2\)
We claim that
holds provided that p, q satisfy \(2/p<3/q\), \(3/p-1/q<1\), and (2.6). Thus (2.11) holds for p, q satisfying (2.5).
We first consider \(\phi _k(r){\mathcal {A}}_t g_k \). We shall show that
holds for \(1\le p\le q\le \infty \). We recall (2.2) and note that \(\partial _t(\widehat{d\sigma }(tr\xi ))\) is uniformly bounded because \(|r\xi |\lesssim 1\). Since \({\text {supp}}\widehat{g_k }\subset \{\xi : |\xi |\le C2^{-k}\}\) and \(\partial _t e^{\frac{r^2+t^2}{2}\xi _1}=t\xi _1 e^{\frac{r^2+t^2}{2}\xi _1}\), we have \( \Vert \phi _k(r) \partial _t {\mathcal {A}}_t g_k\Vert _q\lesssim 2^{-k}\Vert \phi _k(r){\mathcal {A}}_t g_k\Vert _q\) by the Mikhlin multiplier theorem. Applying Lemma 2.3 to \( \phi _k(r){\mathcal {A}}_t g_k\), we see that (2.12) follows if we show
We now make use of the change of variables (2.8). Since \(k\le -2\) and \(t\in [1,2]\), we have \(|\det \frac{\partial (y_1, y_2, \tau )}{\partial (r,x_3,t)}|\sim 1\). Thus the left hand side of (2.13) is bounded by
Changing variables \(\xi \rightarrow 2^{-k}\xi \) and \((y, \tau )\rightarrow (2^ky, 2^k\tau )\) gives
where \(\mathfrak m(\xi )= \widehat{d\sigma }( \tau \xi )\phi _{<0}(\xi )\). Since \(\tau \sim 1\) and \(\phi _{<0}(\xi )\) is a smooth function supported in the set \(\lbrace \xi : |\xi |\lesssim 1 \rbrace \), \(\mathfrak m(\xi )\) is a smooth multiplier whose derivatives are uniformly bounded. So, the multiplier operator given by \(\mathfrak m\) is uniformly bounded from \(L^p({\mathbb {R}}^2)\) to \(L^q({\mathbb {R}}^2)\) for \(\tau \in [2^{-1},2^2]\). Thus, via scaling we obtain (2.13) and, hence, (2.12).
Using the triangle inequality and (2.12), we have
because \(2/p<3/q\). We now consider \(\phi _k(r){\mathcal {A}}_t g^k\) for which we use Proposition 2.1. Since
and since p, q satisfy \(3/p-1/q<1\), \(2/p<3/q\), and (2.6), using the estimate (2.7), we get
Combining this with the above estimate for \(g\rightarrow \phi _k(r){\mathcal {A}}_t g^k\) gives (2.11) and this proves the claim.
2.5 Case \(k\ge 2\)
In this case we show
if \(p\le q\), \(3/p-1/q<1\), and (2.6) holds. So, we have (2.14) if (2.5) holds.
In order to prove (2.14) we first prove the following.
Lemma 2.4
Let \(k\ge -1\). If \(|t|\lesssim 1\) and \(0\le s\lesssim 2^{2k}\), then
where \( {\mathcal {E}}^N_\ell (y) =2^{-2\ell }(1+ 2^{-\ell }|y| )^{-N}.\)
Proof
We note that
where
We note \(\partial _{\xi }^\alpha [\phi _{<-k}(2^{-k}\xi )\widehat{d\sigma }(2^{-k} t\sqrt{2s}\xi ) ]=O(1)\) since \(s\lesssim 2^{2k}\). Thus, changing variables \(\xi \rightarrow 2^{-k}\xi \), by integration by parts we have \(|K|\lesssim {\mathcal {E}}^N_{k} \) for any \(N>0\). Since \(|t|\lesssim 1\) and \(k\ge -1\), we see \({\mathcal {E}}^N_{k} (y_1+2^{-1}t^2, y_2)\lesssim {\mathcal {E}}^N_{k} (y_1, y_2)\). Therefore, we get (2.15). \(\square \)
Proof of 2.14
We begin by observing a localization property of the operator \({\mathcal {A}}_t\). From (2.1) we note that
for \(r\in {\text {supp}}\phi _k\) if k is large enough, i.e., \(2^{-k}\le 10^{-3}\). Thus, from (2.1) and (2.3) we see that
where \([g]_k(r,x_3)=\chi _{I_k}(r) g(r,x_3)\). Clearly, the intervals \({I_k}\) are finitely overlapping and so are the supports of \(\phi _k\). Since \(p\le q\), by a standard localization argument it is sufficient for (2.14) to show
for \(k\ge 2\).
Using the decomposition (2.10), we first consider \( \phi _k(r){\mathcal {A}}_t g_k\). Changing variables \(r\mapsto \sqrt{2s}\), we have
Since \(1<t<2\), \(k\ge 2\), and \( g_k={\mathcal {P}}_{<-k} g\), by Lemma 2.4\(|{\mathcal {A}}_t g_k(\sqrt{2s}, x_3) |\lesssim {\mathcal {E}}^N_{k}*| g|(s, x_3)\). Hence,
The second inequality follows by Young’s convolution inequality and the third is clear because \(k\ge 2\) and \(p\le q\). We now handle \( \phi _k(r){\mathcal {A}}_t g^k\). Since
and since \(3/p-1/q<1\), \(p\le q\), and (2.6) holds, using the estimate (2.7), we get
Therefore, we get (2.17). \(\square \)
2.6 Case \(|k|\le 1\)
To complete the proof of (2.4), the matter is now reduced to obtaining
if p, q satisfy (2.5). In order to show this we use Proposition 2.2. Using the decomposition (2.10), we first consider \( \phi _k(r){\mathcal {A}}_t g_k\). Since \(1<t<2\) and \(|k|\le 1\), by Lemma 2.4 we have \( \phi _k(r)|{\mathcal {A}}_t g_k|\lesssim {\mathcal {E}}^N_0*|g|\). Hence, it follows that
for \(1\le p\le q\le \infty \).
We now consider \( \phi _k(r){\mathcal {A}}_t g^k\). Note that (2.6) is satisfied if (2.5) holds. Since \(3/p-1/q<1\), by (2.18) and Proposition 2.2 we see
taking a small enough \(\epsilon >0\). Therefore we get the desired estimate.
2.7 Global maximal estimate
Using the estimates in this section, one can provide a simpler proof of the result due to Beltran et al. [2], i.e.,
for \(2<p\le \infty \). In order to show this we use the following lemma which is a consequence of Propositions 2.1 and 2.2.
Lemma 2.5
Let \(2\le p\le 4\). Then, for some \(c>0\) we have
Proof
We briefly explain how one can show (2.20). In fact, similarly as before, we decompose
where
and \(S_4= {\mathcal {A}}_t \mathcal P_{\!j}g - S_1- S_2- S_3.\) Then, the estimate (2.20) follows if we show \(\Vert r^\frac{1}{p} \sup _{1<t<2} |S_\ell | \Vert _{L^p_{r,x_3}}\le C 2^{-cj} \Vert g\Vert _p\), \(\ell =1,2,3, 4\) for some \(c>0\). The estimate for \(S_1\) follows from (2.12) and summation over \(k<-j\). Using the estimate of the second case in (2.7), one can easily get the estimate for \(S_2\). The estimate for \(S_3\) is obvious from Proposition 2.2. By Proposition 2.1 combined with the localization property (2.16) we can obtain the estimate for \(S_4\). However, due to the projection operator \(\mathcal P_{\!j}\) we need to modify the previous argument slightly.
where \(K_j={\mathcal {F}}^{-1}( \phi (2^{-j}|\cdot |)\). Note that \(|K_j|\lesssim E_{-j}^N \) for any N and \(k\ge 2\). If \(r\in {\text {supp}}\phi _k\), \(\sqrt{2z_1}\not \in I_k \), and k is large enough, then we have
for any N since \(|2^{-1}r^2-z_1|\gtrsim 2^{2k}\) and \(|rty|\lesssim 2^k\). Hence it follows that
for any N. We break \({\mathcal {A}}_t \mathcal P_{\!j}g= {\mathcal {A}}_t \mathcal P_{\!j}\chi _{I_k}g+{\mathcal {A}}_t \mathcal P_{\!j}(1-\chi _{I_k})g\). Using the last inequality and then Proposition 2.1, we obtain
for some \(c>0\) by taking an N large enough. \(\square \)
Once we have (2.20), using a standard argument which relies on the Littlewood–Paley decomposition and rescaling (for example, see [2, 5, 16] ) one can easily show (2.19). Indeed, we break the maximal function into high and lower frequency parts:
where
For \({\mathcal {A}}_{low\,} g\) we claim
This gives \({\mathcal {A}}_{low\,} g(r,x_3)\lesssim {\mathcal {M}}_{{\mathbb R}^2}g(2^{-1}r^2,x_3)\). Since \({\mathcal {M}}_{{\mathbb R}^2}\) is bounded on \(L^p\) for \(p>2\), for \(2<p\le \infty \) we get
We now proceed to prove (2.22). Note that \(\sum _{j\le 2l} \phi (2^{-j}|\cdot |)=\phi _{<1}(2^{2l}|\cdot |)\) and \(\phi _{<1}\) is a smooth function supported on \([-2^2,2^2]\). Thus, similarly as in (2.21) we note that \({\mathcal {A}}_t {\mathcal {P}}_{<-2l} g(r,x_3) = \iint g(z_1, z_2) \widetilde{K}_l *d\sigma _{tr} ( 2^{-1}(r^2+t^2)-z_1,x_3-z_2) d z \) where \(\widetilde{K}_l={\mathcal {F}}^{-1}( \phi _{<1}(2^{2l}|\cdot |))\). Since \(\widetilde{K}_l\lesssim {\mathcal {E}}_{2l}^N\) for any N, for \(2^{l}\le t < 2^{l+1}\) we see
because \(2^{2l}t^2\lesssim 1\) and \({\mathcal {E}}^{2N}_{2l}=2^{-4l}(1+ 2^{-2l}|y| )^{-2N}.\) Hence, taking an N large enough, we note that
provided that \(2^{l}\le t < 2^{l+1}\). Indeed, to show this we only have to consider the case \(2^{2l}\ll tr\) since the other case is trivial. By scaling \(x\rightarrow trx\) we may assume that \(tr=1\). Thus, it is enough to show \( \int L^{-2}(1+L^{-1}|x-y|)^{-2N}d\sigma (y)\lesssim L^{-1}(1+L^{-1}||x|-1|)^{-N}\) for \(L\ll 1\) with an N large enough. However, this is easy to see since \(|x-y|\ge ||x|-1|\) and \(\int L^{-1}(1+L^{-1}|x-y|)^{-N}d\sigma (y)\lesssim 1\).
Therefore, combining (2.23) and (2.24), one can see
Here \(\mathfrak M_2\) denotes the Hardy-Littlewood maximal function on \({\mathbb {R}}^2\). This proves the claim (2.22) since \(\mathfrak M_2g\lesssim {\mathcal {M}}_{{\mathbb R}^2}g\).
So we are reduced to showing \( \Vert r^\frac{1}{p} {\mathcal {A}}_{high\,} g \Vert _{L^p_{r,x_3}}\le C \Vert g\Vert _p\) for \(p>2\). For the purpose it is sufficient to show
because \({\mathcal {A}}_{high\,} g\le \sum _{k\ge 0} (\sum _l | \sup _{2^{l}\le t < 2^{l+1}} |{\mathcal {A}}_t {\mathcal {P}}_{k-2l} g|^p)^{1/p}\) and \((\sum _l \Vert {\mathcal {P}}_{k-2l} g\Vert _p^p)^{1/p}\lesssim \Vert g\Vert _p.\) By scaling, using (2.2), we can easily see the inequality (2.25) is equivalent to (2.20) while j replaced by k. So, we have (2.25) and this completes the proof of (2.19).
3 Proof of Propositions 2.1 and 2.2
In order to prove Propositions 2.1 and 2.2, we are led by (2.2) to consider \(\widehat{d\sigma }(tr\xi )\) for which we use the following well known asymptotic expansion (see, for example, [20]):
where \( E_N\) is a smooth function satisfying
for \(0\le \ell \le 4\) if \(r\gtrsim 1\). The expansion (3.1) relates the operator \({\mathcal {A}}_t\) to the wave propagator. After changing variables, to prove Propositions 2.1 and 2.2 we can use the local smoothing estimate for the wave operator (see Proposition 3.1 below).
3.1 Local smoothing estimate
Let us denote
We make use of \(L^p\)–\(L^q\) local smoothing estimate for the wave equation in \({\mathbb R}^2\).
Theorem 3.1
Let \(j\ge 0\). Suppose (2.6) holds. Then, for \(\epsilon >0\) we have
This follows by interpolating the estimates (3.3) with \((p,q)=(2,2)\), \((1,\infty )\), and (4, 4). The estimate (3.3) with \((p,q)=(2,2)\) is a straightforward consequence of Plancherel’s theorem and (3.3) with \((p,q)=(1,\infty )\) can be shown by the stationary phase method (for example, see [8]). The case \((p,q)=(4,4)\) is due to Guth et al. [6].
From Theorem 3.1 we can deduce the following estimate via simple rescaling argument.
Corollary 3.2
Let \(j\ge -\ell \). Suppose (2.6) holds. Then, for \(\epsilon >0\) we have
Proof
Changing variables \((x,t)\rightarrow 2^\ell (x,t)\), we see
Thus, using (3.3) we have
So, rescaling gives the desired inequality. \(\square \)
3.2 Proof of Proposition 2.1
We now recall (2.2) and (3.1). To show Proposition 2.1 we first deal with the contribution from the error part \(E_N\). Let us set
Lemma 3.3
Let \(j\ge -k\). Suppose (2.6) holds. Then, we have
Proof
We first consider the case \(k\ge -2\). Using Lemma 2.3, we need to estimate \( \phi _k(r){\mathcal {E}}_t \mathcal {P}_j g\) and \( \phi _k(r)\partial _t {\mathcal {E}}_t \mathcal {P}_j g\) in \(L^q_{r,x_3,t}({\mathbb {R}}^2\times [1,2])\). For simplicity we denote \(L^q_{r,x_3,t}=L^q_{r,x_3,t}({\mathbb {R}}^2\times [1,2])\). We first consider \( \phi _k(r){\mathcal {E}}_t \mathcal {P}_j g\). Changing variables \(\frac{r^2}{2}\mapsto s\), we note that
where
Since \(s\sim 2^{2k}\), using (3.2), we have \(|\mathcal {K}(s,u)|\lesssim 2^{2j}(1+2^j|(s,u)|)^{-M}2^{-N(j+k)} \) for \(1\le M\le 4\) via integration by parts. Thus, we have \( \Vert \phi _k(\sqrt{2s})\mathcal {K}(s+\frac{t^2}{2}, u) \Vert _{L^r_{s,u}}\le C 2^{-N(j+k)}2^{2j(1-\frac{1}{r})} \) for \(1<t<2\) with a positive constant C. Young’s convolution inequality gives \( \Vert \phi _k(\sqrt{2s}){\mathcal {E}}_t \mathcal {P}_j g(\sqrt{2s},x_3)\Vert _{L^q_{s,x_3,t}}\lesssim 2^{-N(j+k)}2^{2j(\frac{1}{p}-\frac{1}{q})}\Vert g\Vert _{L^p} \). Thus, reversing \(s\rightarrow r^2/2\), after a simple manipulation we get
for \(1\le p\le q\le \infty .\) Indeed, we need only note that \( 2j(\frac{1}{p}-\frac{1}{q})-\frac{k}{q}\le 2(j+k)+k( \frac{1}{q}-\frac{2}{p})\) because \(j\ge -k\) and \(\frac{1}{p}-\frac{1}{q}-1<0\).
We now consider \( \phi _k(r)\partial _t {\mathcal {E}}_t \mathcal {P}_j g\). Note that
Using (3.2), we can handle \( \phi _k(r)\partial _t {\mathcal {E}}_t \mathcal {P}_j g\) similarly as before. In fact, since \(|t\xi _1|\lesssim 2^j\) and \( r|\xi |\sim 2^{k+j}\), we see
Hence, combining this and (3.5) with Lemma 2.3, we get (3.4) for \(k\ge -2\).
We now consider the case \(k< -2\). We first claim that
We use the transformation (2.8). By (2.9) we have \(|\frac{\partial (y_1,y_2,\tau )}{\partial (r,x_3,t)}|\sim 1\). Therefore,
where
Note that \(\tau \sim 2^k\). Changing \(\tau \mapsto 2^k\tau \) and \(\xi \mapsto 2^j\xi \), using (3.2) and integration by parts, we have \( |\widetilde{K}(y,2^k\tau )|\le C 2^{2j}(1+2^j|y|)^{-M}2^{-N(j+k)} \) for \(1\le M\le 4\) and \(1<\tau <2\). Young’s convolution inequality gives
Thus, we get (3.7). As for \( \phi _k(r)\partial _t {\mathcal {E}}_t \mathcal {P}_j g\), we use (3.6) and repeat the same argument to see \(\Vert \phi _k(r)\partial _t {\mathcal {E}}_t\mathcal {P}_j g \Vert _{L^q_{r,x_3,t}}\lesssim 2^{-N(j+k)} 2^j 2^{2j(\frac{1}{p}-\frac{1}{q})}\Vert g\Vert _{L^p} \) since \(|t\xi _1|\lesssim 2^j\), \( r|\xi |\sim 2^{k+j}\), and \(k<-2\). Thus, we get
Putting (3.7) and this together, by Lemma 2.3 we obtain (3.4) for \(k<-2\). \(\square \)
By (3.1) and Lemma 3.3, to prove Propositions 2.1 and 2.2 we only have to consider contributions from the remaining \( C^\pm _j |tr\xi |^{-\frac{1}{2}-j} e^{ \pm i|tr\xi |},\) \(j=0,\ldots , N\). To this end, it is sufficient to consider the major term \( C^\pm _0 |tr\xi |^{-\frac{1}{2}} e^{ \pm i|tr\xi |}\) since the other terms can be handled similarly. Furthermore, by reflection \(t\rightarrow -t\) it is enough to deal with \(|tr\xi |^{-\frac{1}{2}} e^{i|tr\xi |}\) since the estimate (3.3) clearly holds with the interval [1, 2] replaced by \([-2,-1]\).
Let us set
To complete the proof of Proposition 2.1, we need to show
Using Lemma 2.3, the matter is reduced to obtaining estimates for \(\phi _k(r){\mathcal {U}}_t \mathcal P_{\!j}g\) and \(\phi _k(r) \partial _t {\mathcal {U}}_t \mathcal P_{\!j}g\) in \(L^q_{r,x_3,t}\). Note that
By the Mikhlin multiplier theorem one can easily see
where \(L^q_{r,x_3,t}\) denotes \(L^q_{r,x_3,t}({\mathbb {R}}^2\times [1,2])\). Therefore, by Lemma 2.3 it is sufficient for (3.9) to prove that
We first consider the case \(k\ge 2\). As before, we use the change of variables (2.8). Since \(|\!\det \frac{\partial (y_1, y_2, \tau )}{\partial (r,x_3,t)}|\sim 2^{2k}\) from (2.9) and since \(\tau =rt\) and \(1<t<2\), we have
since \(|r\xi |\sim 2^{j+k}\). Thus, Corollary 3.2 gives the desired estimate (3.9) for \(k\ge 2\). The case \(k\le -2\) can be handled in the exactly same manner. The only difference is that \(|\!\det \frac{\partial (y_1, y_2, \tau )}{\partial (r,x_3,t)}| \sim 1\). Thus, the desired estimate (3.9) immediately follows from Corollary 3.2.
3.3 Proof of Proposition 2.2
As mentioned already, the determinant of the Jacobian \({\partial (y_1, y_2, \tau )}/{\partial (r,x_3,t)}\) may vanish when \(|k|\le 1\). So, we need additional decomposition depending on \(|r-t|\). We also make decomposition in \(\xi \) depending on \(|\xi |^{-1}{\xi _1}+1\) to control the size of the multiplier \(\left| t\xi _1+r|\xi | \right| \) in a more accurate manner (for example, see (3.22)).
For \(m\ge 0\) let us set
so that \(\sum _{0\le k <m}\psi _k+ \psi ^m=1\). We additionally define
So it follows that
Proposition 3.4
Let us set \(\phi _{k,l}(r,t)= \phi _k(r)\phi (2^l|r-t|). \) Let \(j\ge -1\) and \(k=-1,0,1\). Suppose (2.6) holds. Then, for \(\epsilon >0\) we have
In order to prove Proposition 3.4, we make the change of variables (2.8). Since \(|k|\le 1\), we need only to consider (r, t) contained in the set \([2^{-1} -10^{-2},2^2+10^2]\times [1,2]\). Set
By (2.8) \(y_1-\tau =(r-t)^2/2\). From (2.9) we note \(|\!\det \frac{\partial (y_1, y_2, \tau )}{\partial (r,x_3,t)}|\sim 2^{-l}\) if \((y_1,\tau )\in S_l\). Thus, changing variables \((r,x_3,t)\rightarrow (y_1, y_2, \tau )\) we obtain
Therefore, for (3.12) it is sufficient to show
for p, q satisfying (2.6). For the purpose we need the following lemma, which gives an improved \(L^2\) estimate thanks to restriction of the integral over \(S_l\). Indeed, one can remove the localization \(y_1,\tau \in [2^{-3},2^3]\).
Lemma 3.5
Let \(D_l=\{(x_1,x_2,t): 2^{-2l}\le |x_1-t|\le 2^{-2l+1} \}\). Then, we have
Proof
We write \( x\cdot \xi +t|\xi |=x_1(\xi _1+|\xi |)+ x_2\xi _2+(t-x_1)|\xi |. \) Then, changing variables \((x,t-x_1) \rightarrow (x, t)\) and \(\xi \rightarrow \eta := \mathcal L(\xi )=(\xi _1+|\xi |,\xi _2),\) we see
where \(\widehat{h}(\xi )=\widehat{g}(\xi )\psi _m(\xi )\) and \( I_l=[-2^{-2l+1},-2^{-2l}]\cup [2^{-2l},2^{-2l+1}].\) By Plancherel’s theorem in the \(x-\)variable and integrating in t, we have
A computation shows \(\det J\mathcal {L}=1+|\xi |^{-1}{\xi _1}\), so \(|\!\det J\mathcal {L}| \sim 2^{-m}\) on the support of \(\widehat{h}\). Thus, by changing variables and Plancherel’s theorem we get (3.15). \(\square \)
We also use the following elementary lemma.
Lemma 3.6
For any \(1\le p\le \infty \), j, and m, we have
Proof
Since \( \psi ^m- \psi ^{m+1}=\psi _m\), it suffices to prove the second inequality only. By Young’s inequality we need only to show \(\Vert (\phi _j\psi ^m)^{\vee }\Vert _{L^1}\lesssim 1.\) By scaling it is clear that \(\Vert (\phi _j(\xi )\psi ^m(\xi ))^{\vee }\Vert _{L^1}=\Vert (\phi _0(\xi )\psi ^m(\xi ))^{\vee }\Vert _{L^1}.\) Note that \(\mathfrak m(\xi ):=\phi _0(\xi )\psi ^m(\xi )\) is supported in a rectangular box with dimensions \(2^{-m}\times 1\). So, \(\mathfrak m(\xi _1, 2^{-m}\xi _2)\) is supported in a cube of side length \(\sim 1\) and it is easy to see \(\partial _\xi ^\alpha (\mathfrak m(\xi _1, 2^{-m}\xi _2))\) is uniformly bounded for any \(\alpha \). This gives \(\Vert (\mathfrak m(\cdot , 2^{-m}\cdot ))^\vee \Vert _1\lesssim 1\). Therefore, after scaling we get \( \Vert (\phi _0(\xi )\psi ^m(\xi ))^{\vee }\Vert _{L^1}\lesssim 1. \) \(\square \)
Proof of 3.14
In view of interpolation the estimate (3.14) follows for p, q satisfying (2.6) if we show the next three estimates:
The first estimate follows from Lemma 3.5. Corollary 3.2 and Lemma 3.6 give the other two estimates. \(\square \)
It is possible to improve the estimate (3.12) when \(j>m\).
Proposition 3.7
Let \(j\ge -1\) and \(k=-1,0,1\). Suppose \(1\le p\le q\), \(1/{p}+1/{q}\le 1\), and \(j>m\), then
Proof
By (3.13) it is sufficient to show
for p, q satisfying \(1\le p\le q\), \(1/{p}+1/{q}\le 1\). In fact, by interpolation with the estimates (3.16) and (3.17) we only have to show
Let us set
Then \( e^{i\tau \sqrt{-\Delta }} {\mathcal {P}}_{\!j,m}g = K^{j,m}_\tau *g .\) Therefore, (3.18) follows if we show
when \(t\sim 1\). Note that \( |\xi _2|/|\xi |=\sqrt{1-\xi _1/|\xi |}\sqrt{1+\xi _1/|\xi |}\lesssim 2^{-\frac{m}{2}} \) if \(\xi \in {\text {supp}}\psi _m\). So, \({\text {supp}}\psi _m\) is contained in a conic sector with angle \(\sim 2^{-\frac{m}{2}}\). Let \(\mathcal {S}\) be a sector centered at the origin in \({\mathbb R}^2\) with angle \(\sim 2^{-\frac{j}{2}}\) and \(\phi _\mathcal {S}\) be a cut-off function adapted to \(\mathcal {S}\). Then, by integration by parts it follows that
if \(t\sim 1\). (See, for example, [8]). Now (3.19) is clear since the support of \(\psi _m\) can be decomposed into as many as \(C2^{\frac{j-m}{2}}\) such sectors. \(\square \)
Finally, we prove Proposition 2.2 making use of Propositions 3.4 and 3.7. We recall (2.2) and (3.1). As mentioned before, by Lemma 3.3 we need only to consider \({\mathcal {U}}_t\) (see (3.8)) and it is sufficient to show
for p, q satisfying \(p\le q\), \(1/{p}+1/{q}< 1\) and \(1/{p}+2/{q}> 1\).
Proof of 3.20
Let us set \( \phi ^l(\cdot )=1-\sum _{j=0}^{l-1} \phi (2^j\cdot )\) and \(\phi _k^l(r,t)=\phi _k(r)\phi ^l(|r-t|)\). Then, we decompose
Combining this with (3.11) and using \( \sum _{\frac{j}{2}<l< j} \phi _{k,l}+ \phi ^j_k\le \phi _{k}^{[j/2]-1}\), by the triangle inequality we have
where
The proof of (3.20) is now reduced to showing
for p, q satisfying \(p\le q\), \(1/{p}+1/{q}< 1\) and \(1/{p}+2/{q}> 1\).
Before we start the proof of (3.21), we briefly comment on the decomposition \(S_i\), \(i=1,\ldots , 5\). As for \(S_4\) and \(S_5\), which are easier to handle, the sizes of \(r-t\) and \(|\xi |^{-1}\xi _1+1\) are sufficiently small on the supports of the associated multipliers, so we can remove the dependence of t by an elementary argument. For \(S_1, S_2,\) and \(S_3\), we use Lemma 2.3 combined with (3.10) to control the maximal operators. Different magnitudes of contribution come from \(\partial _t\phi _{k,l}=O(2^l)\) and \(|t\xi _1+r|\xi ||\), so we need to compare them. Writing \(t\xi _1+r|\xi |= t\big ( |\xi |^{-1} \xi _1 +1\big )+(r-t)\), we note
The decompositions in \(S_1, S_2,\) and \(S_3\) are made according to comparative sizes of \(\partial _t\phi _{k,l}=O(2^l)\) and \(|t\xi _1+r|\xi ||\) in terms of l, m, and j.
We first consider \(S_1\). Using Lemma 2.3, we need to estimate \(\phi _{k,l} {\mathcal {U}}_t {\mathcal {P}}_{\!j,m}g \) and \(\partial _t (\phi _{k,l} {\mathcal {U}}_t {\mathcal {P}}_{\!j,m}g)\) in \(L^q_{r,x_3,t}({\mathbb {R}}^2\times [1,2])\). Note that \(\partial _t \phi _{k,l}=O(2^l)\) and \(2^l\lesssim 2^{j-m}\). Thus, recalling (3.10), we apply Lemma 2.3 and the Mikhlin multiplier theorem to get
Thus, by Proposition 3.4 it follows that
Since \(1/{p}+1/{q}-1< 0\) and \(1/p+2/q>1\), we obtain (3.21) with \(i=1\).
We can show the estimate (3.21) with \(i=2\) in the same manner. As before, since \(\partial _t \phi _{k,l}=O(2^l)\) and \(2^l\lesssim 2^{j-l}\), using (3.22), Lemma 2.3, and the Mikhlin multiplier theorem, we have
Thus, by (3.13) and Theorem 3.1, we have \(S_2\lesssim \sum _{0\le l\le \frac{j}{2}} 2^{-\frac{j}{2}} 2^{\frac{j}{q}+\frac{3j}{2}(\frac{1}{p}-\frac{1}{q})+\frac{\epsilon }{2} j}\Vert g\Vert _{L^p}, \) which gives (3.21) with \(i=2\).
We now consider \(S_3\), which we handle as before. Since \(j<2l\), \(2^j\max \lbrace 2^{-m},2^{-l}\}\le 2^l\) if \(l+m\ge j\). Similarly, \(2^{j-m}\ge 2^j\max \lbrace 2^{-m},2^{-l} \rbrace \) and \(2^{j-m}\ge 2^l\) if \(l+m< j\). Using (3.22) and (3.10), we see
Since \(1/p+2/q>1\), using Proposition 3.7, we get (3.21) for \(i=3\).
We handle \(S_4\) and \(S_5\) in an elementary way without relying on Lemma 2.3. Instead, we can control \(S_4\) and \(S_5\) more directly. Concerning \(S_4\) we claim that
if \({5}/{q}> 1+{1}/{p}\) and \(2\le p\le q\le \infty \). This clearly gives (3.21) with \(i=4\) for p, q satisfying \(p\le q\), \(1/{p}+1/{q}< 1\) and \(1/{p}+2/{q}> 1\). We note that
where
and \(\widetilde{\phi }_0\) is a smooth function supported in \([-\pi , \pi ]^2\) such that \(\widetilde{\phi }_0\phi _0=1\). If \((r,t)\in {\text {supp}}\phi _{k}^j\), then \(|t-r|\lesssim 2^{-j}\). Thus, \(|\partial _\xi ^\alpha m(\xi )|\lesssim 1\) for any \(\alpha \). We remove the dependence of t by using a bound on the coefficient of Fourier series, not the Sobolev embedding. Expanding \(\mathfrak m\) into Fourier series on \([-\pi , \pi ]^2\) we have \( \mathfrak m(\xi )= \sum _{k\in {\mathbb {Z}}^2} C_{\textbf{k}} (r,t) e^{i\textbf{k}\cdot \xi }\) while \(|C_{\mathbf{k}} (r,t)|\lesssim (1+|\mathbf{k}|)^{-N} \). Since \(1<t<2\), the estimate (3.23) follows after scaling \(\xi \rightarrow 2^j\xi \) if we obtain
where
When \(q=2\), changing variables \(r^2\rightarrow r\) and following the argument in the proof of Lemma 3.5 we have \(\Vert {\mathcal {R}} {\mathcal {P}}_{\!j,m}g\Vert _{L^2_{r,x_3}([2^{-2}, 2^3]\times {\mathbb {R}})} \lesssim 2^{{m}/{2}}\Vert g\Vert _{L^2}.\) On the other hand, (3.18) gives \(\Vert {\mathcal {R}} {\mathcal {P}}_{\!j,m}g\Vert _{L^\infty _{r,x_3}([2^{-2}, 2^3]\times {\mathbb {R}})}\lesssim 2^{(j-m)/{2}}\Vert g\Vert _{L^\infty }.\) Interpolation between these two estimates gives
for \(2\le q\le \infty \). Since the support \(\widehat{{\mathcal {P}}_{\!j,m}g}(\xi )\) is contained in a rectangular region of dimensions \(2^j\times 2^{j-\frac{m}{2}}\), by Bernstein’s inequality we have
for \(2\le p\le q\le \infty \). Since \({5}/{q}> 1+{1}/{p}\), this proves the claimed estimate (3.23).
Finally, we show (3.21) with \(i=5\). Changing variables \((\xi _1, \xi _2)\rightarrow (2^j\xi _1, \xi _2)\), we observe
where
Note that \( {\text {supp}}\widetilde{\mathfrak m}\subset \{ \xi _1\in [2^{-1}, 2^2] , |\xi _2| \le 2^2 \}\). Since \(|\partial _\xi ^\alpha m(\xi )|\lesssim 1\) for any \(\alpha \), expanding \(\widetilde{\mathfrak m}\) into Fourier series on \([-2\pi , 2\pi ]^2\) we have \( \widetilde{\mathfrak m}(\xi )= \sum _{k\in {\mathbb {Z}}^2} C_{\textbf {k}} (r,t) e^{i 2^{-1}\textbf{k}\cdot \xi }\) while \(|C_{\mathbf {k}} (r,t)|\lesssim (1+|\mathbf{k}|)^{-N} \). Hence, similarly as before, changing variables \((\xi _1, \xi _2)\rightarrow (2^{-j}\xi _1, \xi _2)\), to show (3.21) with \(i=5\) it is sufficient to obtain
for \(1\le p\le q\le \infty \). Clearly, the left hand side is bounded by \(\Vert \mathcal {P}_j^j g(x_1,x_3)\Vert _{L^q_{x_3}(L^\infty _{x_1})}\). The Fourier transform of \( \mathcal {P}_j^j g\) is supported on the rectangle \(\{ \xi _1\in [2^{j-1}, 2^{j+2}] , |\xi _2| \le 2^{j+2} \}\). Thus, using Bernstein’s inequality in \(x_1\), we get
for \(1\le q\le \infty \). Another use of Bernstein’s inequality gives (3.24) for \(1\le p\le q\le \infty \). This completes the proof of (3.20). \(\square \)
Notes
This is true because \(\mathrm {SO}(2)\) is an abelian group. However, \(\mathrm {SO}(n)\) is not commutative in general, so the property is not valid in higher dimensions.
References
Anderson, T.C., Hughes, K., Roos, J., Seeger, A.: \(L^p\)-\(L^q\) bounds for spherical maximal operators. Math. Z. 297, 1057–1074 (2021)
Beltran, D., Guo, S., Hickman, J., Seeger, A.: The circular maximal operator on Heisenberg radial functions. Ann. Sc. Norm. Super. Pisa Cl. Sci. (2021). https://doi.org/10.2422/2036-2145.202001-006
Beltran, D., Hickman, J., Sogge, C.D.: Variable coefficient Wolff-type inequalities and sharp local smoothing estimates for wave equations on manifolds. Anal. PDE 13, 403–433 (2020)
Beltran, D., Oberlin, R., Roncal, L., Seeger, A., Stovall, B.: Variation bounds for spherical averages. Math. Ann. (2021). https://doi.org/10.1007/s00208-021-02218-2
Bourgain, J.: Averages in the plane over convex curves and maximal operators. J. Anal. Math. 47, 69–85 (1986)
Guth, L., Wang, H., Zhang, R.: A sharp square function estimate for the cone in \({\mathbb{R}}^3\). Ann. Math. 192, 551–581 (2020)
Kim, J.: Annulus maximal averages on variable hyperplanes. arXiv:1906.03797
Lee, S.: Endpoint estimates for the circular maximal function. Proc. Am. Math. Soc. 131, 1433–1442 (2003)
Lee, S., Vargas, A.: On the cone multiplier in \({\mathbb{R}}^3\). J. Funct. Anal. 263, 925–940 (2012)
Müller, D., Seeger, A.: Singular spherical maximal operators on a class of two step nilpotent Lie groups. Isr. J. Math. 141, 315–340 (2004)
Mockenhaupt, G., Seeger, A., Sogge, C.: Wave front sets, local smoothing and Bourgain’s circular maximal theorem. Ann. Math. 136, 207–218 (1992)
Narayanan, E., Thangavelu, S.: An optimal theorem for the spherical maximal operator on the Heisenberg group. Isr. J. Math. 144, 211–219 (2004)
Nevo, A., Thangavelu, S.: Pointwise ergodic theorems for radial averages on the Heisenberg group. Adv. Math. 127, 307–334 (1997)
Roos, J., Seeger, A.: Spherical maximal functions and fractal dimensions of dilation sets. arXiv:2004.00984
Roos, J., Seeger, A., Srivastava, R.: Lebesgue space estimates for spherical maximal functions on Heisenberg groups. Int. Math. Res. Not. (2021). https://doi.org/10.1093/imrn/rnab246
Schlag, W.: \(L^p\rightarrow L^q\) estimates for the circular maximal function. Ph.D. Thesis, California Institute of Technology (1996)
Schlag, W.: A generalization of Bourgain’s circular maximal theorem. J. Am. Math. Soc. 10, 103–122 (1997)
Schlag, W., Sogge, C.D.: Local smoothing estimates related to the circular maximal theorem. Math. Res. Lett. 4, 1–15 (1997)
Sogge, C.D.: Propagation of singularities and maximal functions in the plane. Invent. Math. 104, 349–376 (1991)
Stein, E.M.: Harmonic analysis: real variable methods, orthogonality and oscillatory integrals. Princeton Univ. Press, Princeton (1993)
Stein, E.M.: Maximal functions: spherical means. Proc. Natl. Acad. Sci. USA 73, 2174–2175 (1976)
Acknowledgements
Juyoung Lee was supported by the National Research Foundation of Korea (NRF) grant no. 2017H1A2A1043158 and Sanghyuk Lee was supported by NRF grant no. 2021R1A2B5B02001786.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Loukas Grafakos.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lee, J., Lee, S. \(L^p-L^q\) estimates for the circular maximal operator on Heisenberg radial functions. Math. Ann. 385, 1–24 (2023). https://doi.org/10.1007/s00208-022-02377-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-022-02377-w