
Abstract
In this study, we constructed a new type of gripper for micron-sized objects using piezoelectric multi-layer benders. This new gripper is composed of three chopsticks: two are designed to grip micro-objects, and the third is used to help grasp and release the objects. It is well known that a micro-object is much easier to grasp than to release. Electrostatic, van der Waals forces and surface tension between the chopsticks and object are believed to be the main causes of adhesion. We introduced a third auxiliary chopstick to overcome these surface effects and to reduce the electrostatic forces between the object and chopsticks. All three chopsticks were made of tungsten wires with ends sharpened by etching, which minimises the van der Waals effect. We constructed a three-chopstick gripper for micro-objects and tested its functionality by holding and releasing a 100-micron diameter object. The experiment showed that the third auxiliary chopstick functions effectively.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Various kinds of robot hands have been developed to increase productivity and precision when assembling machine parts. Research on the methods of gripping has provided the technology to develop these hands, which have contributed significantly to production automation in the 1990s. Since the technology for manufacturing microcomponents was introduced in the late 1980s (MEMS), the process of manipulating invisible micro-objects, with the naked eye, using a microgripper, has emerged as a field of study. The microgripper executes the tasks of grasping and releasing the object by itself. In general, the microgripper is composed of end effecting parts for gripping, actuators for shifting the microfingertips, sensors for measuring gripping forces and supports for providing a connection to the micromanipulator.
The microgripper can be utilised in various research areas, including micro-assembly, biotechnology and nanotechnology [1, 2, 3]. Micro-assembly processes that require precise grasping, placing and releasing functions are necessary for the manufacture of complicated systems composed of tiny parts fabricated by micromachining. Additionally, in the investigation of living cells or in surgical operations, a tool is required to precisely manipulate micro/nano bio-objects for the purpose of treating or altering them. Moreover, the evolution of the microgripper into the nanogripper may help develop a key technology for molecular manipulation or mechanosynthesis of molecules, as proposed by Drexler [4].
Research activity in this field has increased as the need for the microgripper has risen [5, 6, 7]. By the late 1990s, numerous papers were published on the various manufacturing methods for microgrippers [7, 8, 9, 10]. Kim developed a comb-drive actuating gripper with surface micromachining [5, 6], and Greitmann devised a bimetal-type gripper using the mismatch of the thermal expansion coefficient between silicon and aluminium [8]. Lee utilised the advantage of shape memory alloys [10] and Fumihito developed a piezoelectric gripper equipped with a force sensor [11]. In addition, Tamio introduced a new chopstick-type microgripper [12]. Since the late 1990s, research on developing a micromanipulation system has been actively conducted and reported [11, 12, 13, 14, 15].
Most of the grippers that have been developed can be categorised into two types: those that use the mechanical gripping method, which involves grasping a micro-object by direct contact, and those that use non-mechanical gripping forces such as electrostatic, pressure or surface tension to grasp the object [1, 16, 17, 18]. Until recently, however, non-mechanical grippers have been unable to control a micro-object precisely enough for it to be placed at a desired position in a desired orientation. Therefore, direct contact mechanical gripping has been widely adopted [19, 20, 21]. Typically, mechanical grippers are designed to use one of a number of different actuating principles, such as the electrostatic actuator, Shape Memory Alloy (SMA) deformation, and piezoelectricity [1, 10, 20].
In spite of considerable research on microgrippers, most results have focused on fabrication techniques and have been presented without performance tests. As a result, a realisable solution to the adhesion problems between the object and fingertips that occur in practical applications is rarely considered, which is due, in turn, to insufficient understanding of the operating functions required to grasp the actual object.
In this study, we have designed and fabricated a three-chopstick-type tungsten gripper to preclude adhesion problems. We found that the three-chopstick-type tungsten gripper makes it possible to grasp the micro-object in a more stable manner, using three fingertips. Furthermore, it was designed so that current or voltage can be applied to each fingertip to control adhesion. We conducted experiments on grasping and releasing micro-objects to understand more fully the physical phenomena that cause the adhesion attraction. After investigating what was observed in the experiments, we considered methods to improve the functions of grippers that are designed to operate micro-objects.
In later sections, the requirements and considerations that are the necessary foundation for microgripper design are analysed and a high performance three-chopstick-type tungsten gripper is proposed. We designed this gripper using systematic functional and numerical analyses. The fabrication processes are summarised, and, the performance of the three-chopstick-type tungsten gripper is verified using micro-operation experiments, and some microphenomena that occurred are analysed.
2 Functional requirements and design procedure
Gripping methods can be classified as mechanical, adhesive or absorptive [22]. The adhesive gripping method uses liquids, and has releasing problems introduced by surface tension. Moreover, contamination of the micro-object in the liquid also sometimes occurs. Therefore, this method is rarely used, although it guarantees the user no trouble in gripping objects. The absorptive gripping method, which uses air pressure or electrostatic forces to absorb objects, has little control flexibility. For these reasons, we chose a mechanical chopstick gripper to be the object of this study. Chopstick type grippers, using relatively long fingertips, provide a spacious working area in which objects of various shapes are easily gripped, which allows, in turn, great flexibility in design according to the size of the objects.
The fundamental functions of chopstick-type grippers are gripping, releasing and controlling the orientation of micro-objects, as well as isolating vibrations. Among these functions, orientation control is determined by independent design parameters that are not related to the gripping and releasing functions. Although the gripping and releasing functions are determined by correlated design parameters, particular functions are necessary to release an object, because releasing is not performed easily in micro-environments. In this section, the functional requirements for a gripper to achieve adequate performance and the solving of various technical problems will be investigated in detail. Design considerations required for the gripper to operate on micro-objects will be introduced systematically as a foundation from which better grippers may be developed.
2.1 The gripping function (FR1)
The mechanical gripping methods that have been studied most actively, and that are used in this paper, will be considered in detail. Gripping micro-objects is the essential function of mechanical grippers. The particular requirements for the gripping function can be classified specifically as follows:
- (FR1.1)::
-
The object should be grasped at the desired position correctly.
- (FR1.2)::
-
The object should be grasped in a stable manner, and repeatedly.
- (FR1.3)::
-
The object should not be damaged when grasped with adequate force.
Although it is generally easier to grip than to release objects and control their orientations in the microscopic environment, research that satisfies all three requirements listed above is rarely conducted. Among the physical design parameters, the selection of the fingertip is the first consideration when attempting to satisfy these three requirements. The fingertip is related to all of the functional requirements; hence, the number, size, material and manufacturing process of the fingertips should be considered with these requirements in mind. In the case of the number of fingertips, two are usually adopted, since the gripper can only operate with less than two if it is not a mechanical type [23, 24]. The size of the fingertips should be determined after considering vibration problems and the working space. In addition, the end point of the fingertip must be smaller than the size of the micro-object.
In addition to the geometric problem of the fingers, adequate selection of the actuators is necessary to control the position of the end point of the fingertip. The most important considerations when choosing an actuator are a spacious working area for gripping, a large enough gripping force for holding and high positioning accuracy. Also, the convenience of the fabrication and assembly processes for the grippers must be included among these considerations. Force sensing is a key function that can be used to satisfy requirement FR1.3. With a force sensor, damage to objects, or the magnitude of the adhesive force, can be reduced.
2.2 The releasing function
For a mechanical chopstick-type gripper, the releasing function cannot be considered without the gripping function. The particular requirements for releasing can be classified as follows:
- (FR2.1)::
-
The micro-object should be located at the precise position.
- (FR2.2)::
-
The micro-object should be placed in a stable manner.
- (FR2.3)::
-
The micro-object should be located in the desired orientation.
In this case, unlike the situation with the gripping function, the particular characteristics of the micro-objects must be added to the design parameters in order to satisfy the functional requirements. For example, gravity is negligible compared to the electrostatic force when the size of the object is below 100 μm. The van der Waals attraction and the surface tension must also be considered [1]. In order to minimise the problems created by adhesion forces when an object is released, it is necessary to first analyse the characteristics of these forces. In the case of electrostatic forces, charges on the object can be removed by grounding, which will reduce the electrostatic adhesive forces considerably. Studies of the van der Waals force have reported that these adhesive forces can be reduced by coating the surface or by increasing the roughness of the surface [11, 19]. The surface tension can also be rapidly reduced by drying the surface of the object, for example, by decreasing the humidity of the atmosphere or by applying heat to the surface of the fingertip.
2.3 The orientation control function
Control of the orientation of the object is necessary in order to assemble microcomponents. Therefore, the working space of a gripper should be sufficiently large and the micromanipulator must be accurate and have a spacious working area. All operations must be possible in every direction.
2.4 The vibration isolation function
To execute both gripping and releasing functions well, vibration problems that may be introduced in the process of positioning the gripper or finger should be considered. Because precise control of the fingertip locations is indispensable, the positioning accuracy should be at least less than 1 μm. Vibrations of the supports can cause large positioning errors that are greater than the required resolution, making it impossible to grip objects. As a result, vibration isolation for the grippers and supports must be considered in the design process in such a way as to minimise external vibrations.
3 Design
One of the objectives of this study is to design a gripper that plays an important role as a part of a microtelemanipulation system [25]. This system is composed of four structural components, as shown in Fig. 1. The functions of each component are:

Composition of a microtelemanipulation system
-
1.
The micromanipulator places microfingers at the desired position and in the desired direction.
-
2.
The haptic system controls the micromanipulator and gripper by sending command signals received from human hands, and thus makes it possible to teleoperate micro-objects.
-
3.
The bilateral teleoperating system communicates using bi-directional signals sent between the manipulator and the haptic system.
-
4.
The microgripper grips and releases the micro-objects.
While the micromanipulator, haptic system and bilateral teleoperating system can be constructed relatively easily using applications of existing theories, the microgripper must be designed based on an understanding of microphysical phenomena, because it is in direct contact with the micro-object. For example, gravity is dominant when dealing with macro-objects, but it can be negligible for micro-objects due to their small size and volume. Therefore, the behaviours and interactions of micro-objects must be analysed on the basis of micro-physics as well as on the basis of the more familiar macro-physics. In this section, the Functional Requirements (FRs) for the mechanical chopstick-type gripper that were presented in the previous section are used as the foundation for choosing the appropriate design parameters. The processes of selecting and analysing the design parameters for the gripper are explained in detail in connection with the functional requirements.
3.1 A design process that considers functional requirements
3.1.1 Gripping
Selection of the finger configuration is the design parameter to be considered in connection with gripping. Previous studies have used various types of fingers, such as those made from silicon wafers, shape memory alloys or tungsten wire, [1,10]. Fingers made from a silicon wafer, using a micro machining process, have the advantage of microscopic size and an arbitrary two-dimensional shape, but there are several manufacturing constraints that affect their length, thickness and geometrical aspect ratio. This constrains the working space of the gripper, and thus forces the microfinger to approach the micro-object with a large angle of attack, with the result that the gripper cannot be operated in the horizontal direction [5, 6]. Also, it is easy to damage the finger in the assembling process, due to the brittleness of the material. Accordingly, in this research, tungsten wire was used for the micro fingertips, similar to the probes that are widely used for a Scanning Tunneling Microscope (STM). The tungsten wire fingertip can reduce the possibility of damage from mal-operations. The end point of a tungsten fingertip can also be fabricated to a sub-micron size, and its length and edge-sharpness can be adjusted with ease.
Most conventional grippers use two fingertips. But when they attempt to catch circular micro-objects, they often miss or flip them. Thus, the centre of weight line must be grasped with additional force. Also, the edges of two-fingertip grippers must be aligned precisely parallel to the ground. Three fingertips have been adopted to overcome these difficulties. Two of the three fingertips are designed to grip the object. While one of these two is operated in the direction required for gripping, the other is designed to be actuated in the direction perpendicular to the gripping direction so as to adjust for any mismatch between the ends of the two fingertips. The third fingertip helps to prevent the gripper from missing the object. Consideration of the longitudinal length of the control mechanism is excluded from this study, due to the design complexity of structures that connect fingertips and actuators.
An actuator is one of the most important components of a gripper, as it makes each fingertip shift to the desired position. A number of actuators have been investigated, including a piezoelectric stack, piezoelectric unimorph, electrostatic comb-driver, fluid pressure, shape memory alloys, etc. Among these actuators, the piezoelectric stack equipped with a transformer is the most widely used. In our gripper, a piezoelectric multi-layer bender and piezoelectric stack actuators are used, because they provide a spacious working area and gripping forces that are large enough to catch a micro-object. The piezoelectric multi-layer bender is a type of actuator that converts the longitudinal deformation into bending displacement when a voltage is applied to the piezoelectric material. The actuator can obtain a large displacement from bending, and exert much more force than unimorph or bimorph actuators, by using the multi-layer structure. The two fingertips of the gripper can be operated up to a displacement of 100 μm by the multi-layer bender. The piezoelectric stack is an actuator that uses a 33-direction displacement, and operates with a displacement of −1 to +5 μm when a voltage of −10 to +60 V is applied [26]. The piezoelectric stack is operated in the direction perpendicular to the operating direction of the piezoelectric multi-layer bender, minimising any mismatch between the two gripping fingertip ends that may be introduced by the fabrication procedure. When combined, the piezoelectric stack and multi-layer bender have much greater displacement and force than the actuators in other studies, and they can be used in their own simple motional mechanism without any special transformer to amplify the resultant displacement.
Force-sensing parts, however, are difficult to implant in this type of gripper, because the fingertips are cylindrical. Thus, external sensing devices should be combined with this type of gripper to sense gripping force. For example, gripping forces can be measured with a visual servo sensor that detects the deformation shape of the fingertip, or with a highly sensitive position-sensitive detector that uses the relationship between the bending displacement and the stiffness of the fingertips.
3.1.2 Releasing
In general, electrostatic forces and Van der Waals attraction cause the adhesive phenomenon that occurs when a micro-object is handled. Therefore, grippers are designed such that adding an electric wire to each fingertip can control the electrostatic force. The free charges on the object can be removed by grounding the tungsten fingertips. A repulsive force between fingertips can also be generated by inducing voltages or currents. In addition, the point contact between the object and the tip minimises the van der Waals attraction.
3.1.3 Orientation control of the micro object
It is necessary to have a manipulating system with at least four degrees of freedom to control the direction of the micro-object. In addition, the length of the fingertip should be sufficiently large enough to provide a spacious working area. Therefore, the tungsten fingertips used for this gripper are designed to be as long as possible without inducing vibration.
3.1.4 Vibration isolation
The most frequent problem encountered when gripping or releasing an object at a precise, desired position is that of vibration. To block structural vibrations, the gripper support must be designed with a significant degree of stiffness and high fundamental natural frequency [26]. Bolts are used, if possible, to join the components of the gripper assembly in order to avoid flexible joints that may amplify low frequency vibrations transmitted from the manipulator. In this study, the natural frequency of the fingertip and gripper is calculated using a model to ensure that the fundamental natural frequency of the gripper is beyond (or above) the lower limit frequency. This is verified after the design has been completed using ABAQUS, a finite element method package. The fundamental natural frequency of the gripper structure can be obtained from a cantilever model for the fingertips and the supports. The formula for calculating the natural frequency of a cylindrical cantilever [26] is:
where I=πd 4/64 and m=ρπr 2 L. Using this formula, the natural frequency of the tungsten probe and the support are 191 and 600 Hz, respectively. As indicated in Fig. 2, the numerical analysis gives a natural frequency of 555.18 Hz, which is similar to the design formula result, and is well outside the frequency range that causes vibration problems.

FEM analysis of the gripper base
3.2 The composition and shape of the designed gripper
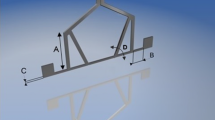
The structure of the gripper obtained through the design processes, after considering the described functional requirements and solutions to the technical problems, is illustrated in Fig. 3. The gripper assembly is composed of the gripper support, two piezoelectric multilayer benders and one piezoelectric stack actuator, three tungsten fingertips and the connecting parts between the actuator and the support. The detailed modelling, design and assembly of each part were performed using the SolidWorks CAD package from the SolidWorks Corporation. The gap between fingertips is designed to be approximately 100 μm, because the diameter of the objects to be gripped and released does not exceed 100 μm.

Composition of the tungsten microgripper
4 Fabrication
The most distinct feature of the fabrication process for this gripper is that it can be completed using existing manufacturing methods such as NC machining, electrical discharge machining, grinding and precision assembly. Micromachining, which has been used in previous research, is not required.
The tungsten fingertips, which are crucial parts, are fabricated using etching, the same technique that is used to manufacture tungsten probes for STM. Two diameters of tungsten wire, 0.25 and 0.30 mm, are used in the fabrication process. The fingertips are clamped to the actuators with steel tubes so as to reduce vibration. The setup used to fabricate the fingertips is shown in Fig. 4. This etching technique can produce a fingertip end that is as small as the radius of an atom and control the tapering angle as desired.

Setup for manufacturing the tip
The connecting parts between the actuators and the supports are very complex in geometry and tiny in size. These difficulties make it impossible to fabricate them using ordinary machining methods; thus, they are fabricated using electrical discharge machining that is widely used for manufacturing micromechanical parts. The support part is fabricated using NC machining, and all the parts are finished by grinding. The actuators were purchased from the Ferroperm Group..
Precision machining was used to reduce the geometrical error. Nevertheless, problems such as adjusting the fingertip length and bonding the fingertips to the actuators caused several tens of microns of mismatch between the ends of the fingertips. To minimise the mismatch errors after the assembly procedure, the micro XYZ axis and rotational stages and the holding jig were used to align the fingertip edges as precisely as possible. During the whole assembly procedure, a 12× magnification CCD camera was used to monitor and check the fingertip edges. To connect the fingertips to the actuator, a cyanic acryl glue was applied at least four times to prevent separation of the connecting parts. The assembly procedure is sketched in Fig. 5.

Assembly procedure for the gripper
5 Experiment
The objectives of the experiments were as follows:
-
1.
To check whether the fingertips worked properly.
-
2.
To test the performance of the gripper by checking the grasping process and locating some objects at the target point.
-
3.
To observe and analyse special phenomena in the world of micro-objects during the experiments.
Observations made during the experiments and subsequent analyses will provide guidelines for designing improved microgrippers.
5.1 Experimental setup
The entire setup for the experiments is presented in Fig. 6. The apparatus is composed of a gripping system, vision systems and microparts. The gripping system is constructed using two XYZ axis micro stages, a rotational stage, a tilting stage, three right-angle brackets, a power supply and the microgripper. The positioning system, with five degrees of freedom, can be constructed using these stages and brackets.

Experimental setup for the tungsten gripper tests
The vision system should be constructed in such a way that the micro-object can be observed from all three directions. If the fingertips are observed from various directions, their position and orientation can be understood in three-dimensional space without difficulty. From this, it becomes possible to control the gripper so as not to damage the fingertips or the micro-objects. In this study, the microrotational stage controls the torsional angle of the gripper assembly so that the edges of two fingertips are parallel to the ground. These fingertips can then easily grasp objects because there is only a small micron mismatch between the two ends. The vision system used in the experiments consisted of a 12× magnification CCD camera, a 10× magnification CCD camera, a camcorder, a CCD monitor and a microscope. The microscope provided the top view and the CCD camera displayed the side view. The high performance camcorder was used to record the entire experimental procedure.
Two types of micro-objects were used in the experiments: 50~100 μm steel beads, and a 70~150 μm subminiature boss, which was made using micro-stereo-lithography. The steel beads were conductive; the boss, made from polymers, was not. A vibration isolation table was used to minimise the effects of external vibration, and a background lighting system was required to obtain good performance from the CCD cameras.
5.2 Experimental procedure
The fingertip can translate to the gripping location by actuating the optical stage. It then approaches the object slowly using the tilting stage, as illustrated in Fig. 7. The object is picked up after setting the fingertips far enough apart. Subsequently, the object is lifted with the tilting stage and shifted to the desired position with the XYZ axis stage. The fingertip is then tilted downwards slowly using the tilting stage until it touches the ground. Charges on the material are removed by connecting the tips with an electrical ground, and the object is released by opening the fingertips sufficiently. These procedures are then repeated to move the next object, using the tilting and XYZ stages.

Operation plans for the gripping test
The experiments showed that the gripping procedure was very effective, as expected. With the aid of the auxiliary fingertip, we could grasp the object in a stable manner without holding the centerline of mass. The gripping force of the three-chopstick gripper was sufficient to grasp the object in a satisfactory manner.
In the process of releasing the object, the circular shapes of the fingertips and the micro-objects reduced the van der Waals attraction forces by minimising the contact area. The fact that the potential energy caused by the van der Waals attraction varies according to the shape of the object is known from previous studies, as shown in Fig. 8 [4]. Most importantly, the adhesive force created by the van der Waals attraction is at its smallest between two spheres. Moreover, the adhesive force induced from the electrostatic force is decreased substantially after any charge in the micro-object is removed by the electrical grounding effect.

Potential energy of the van der Waals attractions
Figure 9 shows the processes used in the steel bead and subminiature boss experiment. With the micro, tilting and rotational stages, the actions required to move the micro-object were possible with five degrees of freedom.

Procedure used for the steel bead and subminiature boss experiment
6 Discussion
Figure 10 shows illustrations of the mechanisms that are introduced to explain three microphysical phenomena that were discovered from this investigation of the gripping procedure. The first phenomenon is that micro-objects rotate at the same position. This may originate from the second moment of inertia, which is generated by the force balance between the three fingertips and a micro-object with the same polarity. The reason for concluding that electrostatic forces induce this is that the object did not rotate when the fingertips were electrically grounded. The second phenomenon is the bouncing of the micro-object, which was observed to occur occasionally, just before contact with the fingertips. It is believed that it is the polar unbalance between the micro-object and the fingertips that causes the object to bounce in arbitrary directions. The last phenomenon is that micro-objects tend to stick to one side of the fingertips. This would happen if the induced charge on one fingertip is much greater than the other, causing a disproportionate attraction to one fingertip. From these observations, we concluded that if the micro-object can be charged then electrostatic force is the major cause of adhesive force, although a previous study reported that the van der Waals attraction is much greater than the electrostatic force or the surface tension [27].

Several microphenomena observed during the gripping experiments
External environmental disturbances such as vibration, dust and electrical charges have very important influences on the control of micro-objects. While grasping and releasing a micro-object can be performed without difficulty in a clean environment, the same actions become more difficult to achieve in dusty conditions, since the adhesive forces increase markedly in this environment. This is because:
-
1.
Dust has free electrons that become variously distributed in a complicated manner.
-
2.
The van der Waals force increases as the contact area increases due to the dust placed between the micro-object and fingertip.
-
3.
The surface tension is also increased by moist dust.
7 Conclusions and future works
The results of this study can be summarised as follows:
-
1.
The functional requirements for designing mechanical microgrippers were introduced and the physical design parameters for each requirement were presented. The functional requirements were summarised as the gripping, releasing, orientation control, and vibration isolation functions.
-
2.
A piezoelectric multi-layer bender was used as a fingertip actuator, providing spacious working conditions and a large bending force. A piezoelectric stack was used to compensate for geometrical variations in the lengths of the fingertips. Three chopsticks were adopted to grip various, differently shaped objects easily. To control the electrostatic forces between the fingertips and the micro-objects, the three fingertips were designed so that an electric voltage could be applied separately to each tip.
-
3.
The microgripper designed in this study was then fabricated to test its performance. From experiments, which consisted of manipulating micro-objects, the new gripper was shown to work better than those developed in previous studies.
-
4.
By analyzing the microphenomena observed during the experiment, the interactions between the gripper and micro-objects were understood more extensively.
Many tasks remain for future work. First, the tungsten fingertip should be fabricated with a thinner and sharper end to handle objects that are only a few microns in size. Furthermore, the gripping force should be controlled more precisely, by integrating a sensitive force sensor into the finger. The position of the end of each tip also needs to be controlled more accurately, allowing for real time compensation for hysteresis of the piezoelectric actuator.
Abbreviations
- f :
-
Frequency (Hz)
- E :
-
Young’s modulus (Pa)
- I :
-
Moment of inertia (m4)
- L :
-
Length of a cantilever (m)
- m :
-
Mass (kg)
- d :
-
Diameter (m)
- ρ :
-
Density (kg/m3)
References
Arai F, Andou D, Fukuda T (1996) Adhesion forces reduction for micro manipulation based on micro physics. In: Proceedings of the IEEE Ninth Annual International Workshop on Micro Electro Mechanical Systems, San Francisco, CA, 11–15 February 1996, pp 354–359
Arai F, Morishima K, Kasugai T, Fukuda T (1997) Bio-micromanipulation (new direction for operation improvement). In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robot and Systems, Grenoble, France, September 1997, pp 1300–1305
Kim P, Lieber CM (1999) Nanotube nanotweezers. Science 286:2148–2150
Drexler E (1992) Nano systems. Wiley, New York
Kim CJ, Pisano AP, Muller RS (1991) Overhung electrostatic microgripper. In: Proceedings of the International Conference on Solid-State Sensors and Actuators, Chicago, IL, June, 1991, pp 610–613
Kim CJ, Pisano AP, Muller RS, Lim MG (1992) Polysilicon microgripper. Sens Actuat A A33:221–227
Chu PB, Pister KSJ (1994) Analysis of closed-loop control of parallel-plate electrostatic microgrippers.In: Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, May, 1994, pp 820–825
Greitmann G, Buser R (1995) Tactile microgripper for automated handling of microparts. In: Proceedings of the 8th International Conference on Solid-State Sensors and Actuators and Eurosensors IX, Stockholm, Sweden, 25–29 June 1995
Ballandras S, Daniau W, Basrour S, Robert D, Rocher S, Robert L, Blind P, Rouillay M, Bernede P et al. (1995) Microgrippers realised by LIGA techniques. In: Proceedings of the INRIA/IEEE Symposium on Emerging Technologies and Factory Automation, Paris, France, 10–13 October 1995, pp 271–274
Lee AP, Ciarlo DR, Krulevitch PA, Lehew S, Trevino J, Northrup MA (1995) Practical microgripper by fine alignment, eutectic bonding and SMA actuation. In: Proceedings of the 8th International Conference on Solid-State Sensors and Actuators and Eurosensors IX, Stockholm, Sweden, 25–29 June 1995, pp 368–371
Arai F, Andou D, Nonoda Y, Fukuda T (1996) Micro manipulation based on micro physics: micro pyramids on endeffector surface for attractive force reduction. In: Proceedings of the Micro-Electro-Mechanical Systems (MEMS) Conference, San Diego, CA, 11–15 February 1996, pp 367–372
Tanikawa T, Arai T, Masuda T (1996) Development of micro manipulation system with two-finger micro hand. In: Proceedings of the IEEE/RSJ International Conference, Osaka, Japan, November 1996, pp 850–855
Ku S, Salcudean SE (1996) Design and control of a teleoperated microgripper for microsurgery. In: Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, 22–28 April 1996, pp 889–894
Carrozza MC, Dario P, Menciassi A, Fenu A (1998) Manipulating biological and mechanical micro-objects using LIGA-microfabricated end-effectors. In: Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–21 May 1998, pp 1811–1816
Suzuki Y (1996) Flexible microgripper and its application to micro-measurement of mechanical and thermal properties. In; Proceedings of the IEEE Micro-Electro-Mechanical Systems (MEMS), San Diego, CA, 11–15 February 1996, pp 406–411
Kozuka T, Tuziuti T, Mitome H, Fukuda T (1994) Acoustic manipulation of microobjects using an ultrasonic standing wave. In: Proceedings of the Micro Machine and Human Science Conference, Nagoya, Japan, 2–4 October 1994, pp 83
Hirano K, Yamaguchi A, Maeda Y, Matsuzawa Y, Katsura S, Mizuno A (1998) Manipulation of single DNA molecules in globular state: recovery into capillary and direct laser trapping. In: Proceedings of the Seventh International Symposium on Micro Mechatronics and Human Science, Nagoya, Japan 1998, pp 205–211
Aoyama H, Hiraiwa S, Iwata F, Fukaya J, Sasaki A (1995) Miniature robot with micro capillary capturing probe. In: Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4-6 October 1995, pp 173–178
Zhou Y, Nelson BJ (2000) The effect of material properties and gripping force on micrograsping. In: Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, 24–27 April 2000, pp 1115–1120
Haddab Y, Chaillet N, Bourjault A (2000) A microgripper using smart piezoelectric actuators. In: Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Takmatsu, Japan, 31 October–5 November 2000, pp 659–664
Pan CS, Hsu W (1997) Electro-thermally and laterally driven polysilicon microactuator. J Micromech Microengin 7:7–13
Zesch W, Brunner W, Weber A (1997) Vacuum tool for handling microobjects with a NanoRobot Proceedings. In: Proceedings of the IEEE International Conference on Robotics and Automation, Alburquerque, NM, 20–25 April 1997, pp 1761–1766
Arai F, Fukuda T (1997) Adhesion-type micro end effector for micromanipulation. In: Proceedings of the IEEE International Conference on Robotics and Automation, Alburquerque, NM, 20–25 April 1997, pp 1472–1477
Saito S, Miyazaki H, Sato T (1999) Pick and place operation of a micro-object with high reliability and precision based on micro-physics under SEM. In: Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, 10–15 May 1999, pp 2736–2743
Kobayashi H, Nakamura H, Tatsuno J, Iijima S (1993) Micro-macro tele-manipulation system. In: Proceedings of the 2nd IEEE International Workshop on Robot and Human Communication, Tokyo, Japan, November 1993, pp 165–170
Pilkey WD (1994) Formulas for stress, strain, and structural matrices. Wiley-Interscience, New York
Fearing RS (1995) Survey of sticking effects for micro parts handling. In: Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, Philadelphia, PA, 3–14 August 1995, pp 212–217
Acknowledgments
We would like to thank Professors W. K. Jung, I. H. Suh, S. R. Oh, S. M. Chung, Y. Kook and Dr. B. J. You and also appreciate the help of S. J. Kwon and N. K. Chung. This work is accomplished with the help of the ‘Development of Core Technologies for Fabrication of Micro Tele-Manipulators’ which is supported by the Korean Ministry of Science and Technology, and with the help of the ‘Brain Korea 21 Project’, funded by the Korean Ministry of Education with Posco.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Park, J., Moon, W. The systematic design and fabrication of a three-chopstick microgripper. Int J Adv Manuf Technol 26, 251–261 (2005). https://doi.org/10.1007/s00170-002-1493-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-002-1493-x