
Abstract
In this study, a novel micro-gripper using a piezoelectric actuator was designed and improved by the design of experiments (DOE) approach. Using a bending PZT actuator connected to the micro-gripper by a rigid wedge can be considered as a novel approach in this field. Almost all of the similar grippers in this category were former actuated by a piezo-stack which has some limitations and difficulties like fabrication in MEMS proportions. The basic design was borrowed from compliant mechanisms that are suitable for MEMS application and easy to manufacture in micro-scale because of the intrinsic integration characteristic. Since stress concentration is common in flexure hinge compliant mechanisms, our focus was to consider strength as an important factor in our design. Finite element analysis tools were used to implement the DOE based on two criteria; minimizing stress concentration and maximizing the output displacement in the micro-gripper structure as much as possible with the consideration of the total size of the gripper. The experiment was performed to validate the simulation results and experiment results agreed well with the simulation one. The slight geometrical discrepancy in significant portions of structure like flexure hinges partially contributes to the accumulated error between the simulation and the experiments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Gripping and manipulating of microscale objects is required for a wide variety of significant applications such as the assembly of micro-parts in miniature systems or electronic equipment (Nah and Zhong 2007). An effective mechanical manipulator should possess the ability to accurately grasp objects with different shapes. Besides, the manipulators should be able to control grasping forces to avoid any damage to the small-size delicate objects which are less than 1 mm in diameter (Nah and Zhong 2007).
In recent years, a variety of micro-grippers have been developed for the manipulation of micro-sized objects. Different mechanisms of actuation have been used for micro-gripper applications such as piezoelectric (Ando et al. 1990; Gao et al. 2006; Pérez et al. 2006), electrostatic (Millet et al. 2004), SMA (Kyung et al. 2008; Kohl et al. 2002; Zhong and Chan 2007) or electrothermal (Solano and Wood 2007; Chan and Li 2003).
Over the years, micro-scale technologies have been developed in micro-manufacturing (Aminzahed et al. 2017a, b), information technology (Uchino 2008), optics (Li et al. 2014), Energy harvesting (Aminzahed et al. 2016), medicine and biology covering areas such as diagnostics, drug delivery, tissue engineering and minimally invasive surgery (Nah and Zhong 2007). Micro grippers are the tools for various micro-scale operations such as assemblies of micro parts, manipulations of biological cells, and handlings of living bodies for microsurgeries (Jeon et al. 2007). Thus, conventional gripping tools are consuming high power, and their sizes are too large to handle micro-objects. Most of the previous micro grippers used heavy actuating parts such as VCM (voice coil motor) (Jeon et al. 2007). Liang et al. (2018) designed an asymmetrical micro-gripper with piezoelectric in which just one jaw is movable to grip objects. They used a novel controller to optimize the gripping force to prevent failure in the grasping process. Wang et al. (2019) introduced a new design on a dual-axis micro-actuator using piezoelectric based on the pseudo-rigid-body modeling method. Sun et al. (2015) used a hybrid flexure structure to design a micro-gripper with large displacement driven by PZT actuator. They also implement experimental and FEM analysis to calculate jaw displacement. Based on their results the obtained maximum displacement for one jaw was 86 µm. Liang et al. (2019) designed a high precision micro-flexure mechanism with two degrees of freedom based on three Hooke’s joints. Wang et al. (2018) designed a new actuator-internal micro-positioner with a piezoelectric actuator with an error correction function in which the positioning error of the coarse stage is compensated by a novel amplifier with the shape of bridge based on a single notch. In their other paper (Wang et al. 2016), they used a three-stage flexure structure composed of the homothetic bridge and leverage mechanisms to fabricate and control of a novel micro-actuator to achieve accurate and robust operations. Basically, finite element analysis is a useful tool that was conducted in many of their work to compare the modeling with experimental testing (Wang et al. 2014). Lofroth and Avci (2019) designed a modular micro-gripper based on PZT stack by combining bridge and lever amplifying methods into their work. Their analysis showed that their micro-gripper could have 154 µm jaw displacement. Nachippan et al. (2018) designed a simple micro-gripper and used three different materials i.e. Poly-si, Silicon, and Silicon dioxide for the frame to investigate the effect of material type on total tip displacement. Their maximum obtained tip deflection was 0.085 µm. PZT-5H was the actuator used in their study.
In our previous work (Mehrabi and Aminzahed 2019) we used SMA to design and manufacture a novel micro-gripper. In this study, we used a bending piezoelectric to design a new micro-gripper. The piezoelectric micro grippers have some advantages such as more precise positioning of objects and considerably lower power consumption than others. Multilayer bending PZT actuator is single co-fired ceramic components with ceramic layers and internal electrodes configured as to generate a bending mode. This kind of PZT actuators is used in numerous applications in optics, telecommunication, instrumentation, automotive, valves (Kaplan et al. 2018).
We compared our proposed micro-gripper with a piezo actuator manipulates micro-object with some micro-grippers with any kind of actuators like piezoelectric or shape memory alloy with the same. Our micro-gripper had much larger deformation to grasp a larger range of objects. There exist a linear property of piezo and linear response between input and output displacement in micro-gripper that leads to the set of micro-gripper with piezo actuator manipulates micro-object with high precision compared to some micro-grippers with other actuators like shape memory alloy. Also, because of a layered structure in the bending type of Piezo which makes it capable to be fabricated by chemical solution deposition, RF-sputtering and pulsed laser deposition in micro-scale, the micro-gripper can be scaled to very small dimensions.
One of the biggest concerns in previous works done by other authors was about increasing tip displacement in micro-gripper. In this study, an easily manufacturable micro-gripper was designed by using bending PZT as an actuator in a novel manner to have a large tip displacement in jaws. By using the finite element method (FEM) the maximum stress and the maximum displacement of the gripper jaws were calculated. To validate the simulation results, experimental tests have been carried out and the results were compared to the corresponding simulation. In bending PZT actuator, a negative and positive voltage can be applied to transfer bending deformation directly to the frame with the help of assembled wedge to open and close micro grippers jaws. This feature cannot be applied in micro-gripper with a piezo-stack actuator.
2 Design and principle operation
The initial design of micro-gripper was obtained based on experience and intuition and the compatibility with bending PZT actuator. In addition in our design we considered a combination of an integrated cantilever beam, arms, corners that creates spring structure which led to the schematic design of the flexure hinge mechanism with an initial dimensions.
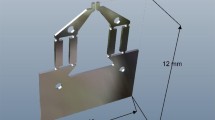
To optimize the dimensions, design of experiments (DOE) approach was used to achieve minimum stress concentration and maximum output displacement. For this purpose, main geometrical parameters are shown in Fig. 1 that have a major effect on output displacement are considered. Then by using different values (levels) for every parameter and using of DOE method in Minitab software, the optimum value for each parameter is obtained. This software presented designed experiments with different parameters in different levels. Each set of variants was used in finite element analysis to obtain output displacement. By analyzing the results, the maximum output displacement was regarding to these parameters A = 12 mm, B = 4 mm, C = 0.5 mm, D = 58°. Finally Based on Analysis of Variance table and Pareto chart the most effective parameters in output displacement among 4 parameters was D and the second effective one was C.

The main geometrical parameters of micro-gripper
Figure 2 shows a conceptual drawing of the micro-gripper proposed in this study. The longest size of the micro-gripper is 40 mm. Figure 3 shows different parts of micro-gripper such as gripping jaws, bending PZT, flexure hinges, and a wedge.

Conceptual drawing of micro-gripper

Different parts of micro-gripper
The bending PZT which is the actuator is composed of two layers Lead Zirconate Titanate and a metal layer. Table 1 show the physical properties of the bending PZT used in this study.
The principle of operation of the proposed micro-gripper is as follows: first, when the voltage is applied to bending piezo, it is bent and it creates small displacements with a high force capability. The created deformation is transferred to gripper by a wedge that is between bending piezo and gripper that is shown in Fig. 3. The applied voltage to the piezo causes to open micro grippers jaws and by disconnecting the voltage the piezo returns to its initial state and leads to close the micro grippers jaws.
3 Structural analysis
Finite element analysis (FEA) was performed to analyze the stress and deformation behavior of the compliant mechanism. Solid 3D elements were used to model the micro-gripper mechanism and predict, stress concentration and displacements of the micro-gripper mechanism (Fig. 4). The material properties used for the FEA of the micro-gripper is aluminum alloy (7075) with Young’s Modulus, E = 71 GPa, Poisson’s Coefficient = 0.3, Density = 2700 kg/m3 and the Yield Stress = 450 MPa. Aluminum alloy (7075) was used as the base material for the structure because it is a flexible, lightweight and a common engineering material that is easy to be machined by EDM.

The meshing of the mechanism
The modeling is performed by two methods; first is using PZT directly in the model, and second is using equivalent force of PZT instead of whole PZT model. In the first method all of the characteristic of PZT such as binding metal layer are modeled in Comsol Multiphysics software (see Fig. 5). In order to make sure that the bending piezo model works well the second modeling is done by calculating the actuating moment force of bending piezo using mathematical methods then replacing the calculated amount of equivalent moment force as an input moment for the second simulation. Figure 6 shows the correct place of applied equivalent moment force. This equivalent moment is obtained by the mathematical calculation in Sect. 3.1. The stress and displacement distribution results from these two different methods are discussed in the next section.

The geometry of bending PZT

The position of applying equivalent moment force of bending piezo
3.1 Modeling of piezo actuator
A pair of piezoelectric ceramics bonded on the top and bottom surfaces of the flexible beam is used as the actuator (Shahinpoor and Schneider 2008). The material properties of the piezoelectric are assigned according to Table 2 in this modeling. The forces induced by bonded piezoelectric actuators can be modeled as a pair of moments at the endpoints of the piezoelectric actuators. Neglecting the geometric stiffness effects of the piezoelectric actuator on the beam (these effects are later included in the dynamic model for control implementation) and assuming a linear strain distribution over piezoelectric actuator thickness, the endpoint moment (Ma) induced by an applied voltage V to the piezoelectric actuator can be obtain by Eq. (1) (Shahinpoor and Schneider 2008):
where \( \tilde{t} \),\( \gamma \), \( \varLambda \) is calculated by Eq. (2–4), respectively.
where Eb, tb, ta, Wb and Wa can be found in Table 3. Also, Table 2 shows the piezoelectric material properties used in the modeling. Based on data provided in these two tables and replacing them in Eqs. (1) through (4) the amount of Ma for input maximum voltage of 72 V (as an example) is 0.77 × 10−3 N m that is considered as the equivalent moment of piezo for maximum voltage (72 V).
Based on modeling results that are shown in Fig. 7 for the first model the maximum stress obtained is about 72 MPa which is a smaller value than the yield stress of aluminum alloy (Al-7075 yield stress is 450 MPa). Also, the maximum displacement of the gripper’s jaws is 143 µm. For the second method (Fig. 8) that is used analysis of the structure by direct simulation of micro-gripper the obtained maximum displacement of gripper’s jaws and the maximum stress in voltage of + 72 V are 143 µm and 53 MPa. This stress amount is also much smaller than the yield stress of aluminum alloy.

Displacement and stress concentration in simulation by piezo for maximum voltage (72 V)

Displacement and stress concentration in simulation by equivalent moment of piezo for maximum voltage (72 V)
Figure 9 illustrates the comparison of results obtained from two different modeling methods. The equivalent force methods is compared with simulation of piezo directly in Comsol software. The mean error between tip displacements for these two methods is about 4% which is acceptable so it demonstrates the convergence for two different modeling methods.

Tip displacement versus the applied voltage
4 Fabrication of the micro-gripper
Dimensions of the designed micro-gripper was small to handle few microns objects and also large enough to manipulate components with hundreds of microns dimension. The compliant mechanism moves solely by deformation and by utilizing its flexural hinges instead of conventional bearings, joints and gears. Aluminum alloy (7075) was used as the base material for the structure because it is a flexible, lightweight and a common engineering material that is easy to be machined by wire-EDM. The wire-EDM machines is chosen because it has accuracy of 0.1 μm to manufacture metal objects. Figure 10 shows the fabricated micro gripper frame using EDM method. The bending piezo set-up is glued to the gripper frame as shown in Fig. 11.

The fabricated micro gripper frame using the wire-EDM method

The bending piezo set-up glued to the gripper frame
5 Experimental result and discussion
The experimental set-up is composed of designed gripper, data acquisition, imaging devices, and voltage supply instrument. Laser sensor, Optical images (Lee et al. 2002), Digital microscope (Chen et al. 2003) and Microscope with a CCD camera (Hsu et al. 2009; Teyssieux et al. 2011) attached are some usual ways for measuring the displacement between two gripper jaws. As shown in Figs. 12 and 13 a digital microscope (model ISM-PM200S) was used to measure the tip-displacement of gripper. Figure 14 graphically illustrates two distinctive grasping clearances of the gripper.

The digital microscope used for experimental observation

Transferring the obtained images from the microscope to computer

Various displacement modes of the micro-gripper
Based on our design for micro-gripper, an amplification factor of 2 can be achieved. Figure 15 shows the proof for this claim.

Tip displacement versus input displacement of micro-gripper
The experiments were performed to investigate and validate the performance of the gripper during operation and the experiment results agree well with simulation. The experiment was performed by applying the voltages 15, 30, 45, 60 and 72. Figure 16 shows the displacements obtained for different voltages from simulation and experiment. The maximum stroke of 150 µm can be achieved in one the microgripper’s jaw. Based on Fig. 16 the linear behavior of PZT actuator can be figured out. This linearity make the control of mechanism and manipulation of objects easier with more accuracy. The error between results obtained from simulation and experiment is shown in Table 4. The main reason that is caused to create error between simulation and experiment is the contact between piezo, wedge and micro-gripper. In the practical experiment these three parts stick to each other by glue and in the simulation they are jointed to each other by definition of rigid joint boundary conditions. Another highly potential error contribution is associated to the application of wire EDM microfabrication technique. According to principle of operation in EDM and metal removing process, this technique imposes significant limitation to the performance of the final product. Slight geometrical discrepancy in significant portions of structure like flexure hinges partially contributes the accumulated error between the simulation and the experiments.

The tip displacements of the micro-gripper obtained from the simulation and the experiment
The grasping of micro object with the different size of 50, 70, 85, 100 µm are done to test the function of device. All the size was successfully grassed without any damage or fractal. The grasping force for these different objects are shown in Table 5.
The characteristics of micro-gripper are investigated using Comsol software based on finite element analysis (FEA). The deformation behavior of the jaws, flexure hinges and moving linkages under the maximum input displacement of piezo actuator is calculated. The result shows that the maximum displacement of a jaw can reach 143 μm which can enable grasping operations of a large range of micro-objects. The maximum stress obtained in the flexure hinges and corners was 72 MPa and it is less than the yield strength (Al-7075 yield stress is 450 MPa) of the material.
A grasping force analysis was carried out to determine the relationship of the grasping force versus input displacement of micro-gripper displacement. The grasping force is calculated by FEM analysis and the results are shown in Fig. 17. Before the jaws contact with the micro-objects, the grasping force is zero, and the grasping force increases linearly with the increase of actuator displacement. The grasping force can reach up to 800 mN when the input displacement of micro-gripper is 70 μm. For general micromanipulation, this micro-gripper can be actively controlled to open and close their tips. Actively controlled micro-grippers are well suited for grasping irregular objects for both static and dynamic systems.

The grasping force calculated by FEM analysis
6 Conclusion
In this study, a novel micro-gripper using a piezoelectric actuator was designed and manufactured. Using bending piezo connected to the micro-gripper by a rigid wedge can be considered as a novel approach in this field. Using bending Piezo as the actuator is novel because the piezoelectric actuators that have been used before are mostly Piezo stacks type and according to their mechanism they have some limitations in modeling, simulation, and micro-fabrication in MEMS. Finite element analysis was used to improve the design based on two criteria; having minimizing stress concentration and maximizing the output displacement in the micro-gripper structure as much as possible with respect to the size. The structure analysis was performed by numerical modeling and experimental. Simulation results have proven the good performance of the micro-gripper and the experiment results agreed well with the simulation. The maximum stress that is occurred around the flexure hinges is much smaller than the critical stress of aluminum alloy and structure doesn’t have any problem with elastic deformation. The microgripper is capable of producing large gripping strokes up to 300 µm. Due to the linear property of piezo and linear response between input and output displacement in micro-gripper, the set of micro-gripper with piezo actuator manipulates micro-object with high precision compared to some micro-grippers with other actuators like shape memory alloy. Due to layered structure in bending Piezo that makes it capable to be fabricated by chemical solution deposition, RF-sputtering and pulsed laser deposition in micro-scale, the micro-gripper can be scaled to very small dimensions.
References
Aminzahed I, Zhang Y, Jabbari M (2016) Energy harvesting from a five-story building and investigation of frequency effect on output power. Int J Interactive Design Manuf (IJIDeM) 10:301–308
Aminzahed I, Mashhadi MM, Sereshk MRV (2017a) Investigation of holder pressure and size effects in micro deep drawing of rectangular work pieces driven by piezoelectric actuator. Mater Sci Eng, C 71:685–689
Aminzahed I, Mashhadi MM, Sereshk MRV (2017b) Influence of drawn radius in micro deep drawing process of rectangular work pieces via size dependent analysis using piezoelectric actuator. Int J Interactive Design Manuf (IJIDeM) 11:893–902
Ando Y, Sawada H, Okazaki Y, Ishikawa Y, Kitahara T, Tatsue Y et al (1990) Development of micro grippers. In: Micro system technologies, vol 90. Springer, pp 844–849
Chan H-Y, Li WJ (2003) A thermally actuated polymer micro robotic gripper for manipulation of biological cells. In: 2003 IEEE international conference on robotics and automation (Cat. No. 03CH37422), pp 288–293
Chen J, Qin Y, Yu A, Liu B (2003) Micro-experimental study for the stress effects on the interphase of composite materials. Opt Lasers Eng 39:473–478
Gao P, Yao K, Tang X, He X, Shannigrahi S, Lou Y et al (2006) A piezoelectric micro-actuator with a three-dimensional structure and its micro-fabrication. Sens Actuators A Phys 130:491–496
Hsu C-C, Lu M-C, Wang W-Y, Lu Y-Y (2009) Distance measurement based on pixel variation of CCD images. ISA Trans 48:389–395
Jeon C-S, Park J-S, Lee S-Y, Moon C-W (2007) Fabrication and characteristics of out-of-plane piezoelectric micro grippers using MEMS processes. Thin Solid Films 515:4901–4904
Kaplan S, Cohen Y, Lewin D, Simon MB, Haber EA (2018) Piezo-electric actuators, ed: Google Patents, 2018
Kohl M, Krevet B, Just E (2002) SMA microgripper system. Sens Actuators A Phys 97:646–652
Kyung J, Ko B, Ha Y, Chung G (2008) Design of a microgripper for micromanipulation of microcomponents using SMA wires and flexible hinges. Sens Actuators A Phys 141:144–150
Lee C-K, Law K-T, King NM, Rabie A-BM (2002) A comparison between a conventional optical method and image-analysis for measuring the unimpeded eruption rate of the rat mandibular incisor. Arch Oral Biol 47:555–562
Li H, Dong B, Zhang Z, Zhang HF, Sun C (2014) A transparent broadband ultrasonic detector based on an optical micro-ring resonator for photoacoustic microscopy. Sci Rep 4:4496
Liang C, Wang F, Shi B, Huo Z, Zhou K, Tian Y et al (2018) Design and control of a novel asymmetrical piezoelectric actuated microgripper for micromanipulation. Sens Actuators A Phys 269:227–237
Liang C, Wang F, Huo Z, Shi B, Tian Y, Zhao X, Zhang D (2019) A 2-DOF monolithic compliant rotation platform driven by piezoelectric. IEEE Trans Ind Electron. https://doi.org/10.1109/TIE.2019.2935933
Lofroth M, Avci E (2019) Development of a novel modular compliant gripper for manipulation of micro objects. Micromachines 10:313
Lutterotti L (2016) Ferroelectrics and piezoelectrics for MEMS
Mehrabi H, Aminzahed I (2019) Design and testing of a microgripper with SMA actuator for manipulation of micro components. Microsyst Technol 2018:1–6
Millet O, Bernardoni P, Régnier S, Bidaud P, Tsitsiris E, Collard D et al (2004) Electrostatic actuated micro gripper using an amplification mechanism. Sens Actuators A Phys 114:371–378
Nachippan NM, Venkatesh A, Muniyappan M (2018) Modelling and analysis of piezoelectric microgripper for unmanned aerial vehicle. Mater Today Proc 5:19456–19462
Nah S, Zhong Z (2007) A microgripper using piezoelectric actuation for micro-object manipulation. Sens Actuators A Phys 133:218–224
P Systems (2017) Piezoelectric actuators & motors. https://piezo.com/collections/piezoelectric-actuators-motors?_=pf&pf_t_quantity=Quantity__1
Pérez R, Chaillet N, Domanski K, Janus P, Grabiec P (2006) Fabrication, modeling and integration of a silicon technology force sensor in a piezoelectric micro-manipulator. Sens Actuators A Phys 128(367–375):2006
Shahinpoor M, Schneider H-J (2008) Intelligent materials: Royal Society of Chemistry. https://doi.org/10.1039/9781847558008
Solano B, Wood D (2007) Design and testing of a polymeric microgripper for cell manipulation. Microelectronic Eng 84:1219–1222
Sun X, Chen W, Fatikow S, Tian Y, Zhou R, Zhang J et al (2015) A novel piezo-driven microgripper with a large jaw displacement. Microsyst Technol 21:931–942
Teyssieux D, Euphrasie S, Cretin B (2011) MEMS in-plane motion/vibration measurement system based CCD camera. Measurement 44:2205–2216
Uchino K (2008) Piezoelectric actuators 2006. J Electroceramics 20:301–311
Wang F, Liang C, Tian Y, Zhao X, Zhang D (2014) Design of a piezoelectric-actuated microgripper with a three-stage flexure-based amplification. IEEE/ASME Trans Mechatron 20:2205–2213
Wang F, Liang C, Tian Y, Zhao X, Zhang D (2016) Design and control of a compliant microgripper with a large amplification ratio for high-speed micro manipulation. IEEE/ASME Trans Mechatron 21:1262–1271
Wang F, Huo Z, Liang C, Shi B, Tian Y, Zhao X et al (2018) A novel actuator-internal micro/nano positioning stage with an arch-shape bridge type amplifier. IEEE Trans Ind Electron 66(12):9161–9172
Wang F, Shi B, Tian Y, Huo Z, Zhao X, Zhang D (2019) Design of a novel dual-axis micromanipulator with an asymmetric compliant structure. IEEE/ASME Trans Mechatronics 24:656–665
Zhong Z, Chan S (2007) Investigation of a gripping device actuated by SMA wire. Sens Actuators A Phys 136:335–340
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mehrabi, H., Hamedi, M. & Aminzahed, I. A novel design and fabrication of a micro-gripper for manipulation of micro-scale parts actuated by a bending piezoelectric. Microsyst Technol 26, 1563–1571 (2020). https://doi.org/10.1007/s00542-019-04696-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-019-04696-6