
Abstract
In this paper design modifications are proposed in microgripper design using two in-plane chevron electrothermal actuators. The design modifications are, converting free–free gripping arm into a clamped-free gripping arm and inclusion of the heat sinks in the shuttle. The modified design provides reduced temperature at the gripping jaws and higher gripping force. The proposed microgripper is modelled analytically and numerically using MEMS CAD tool CoventorWare. The performance of the microgripper such as displacement, force and temperature for the voltage range of 0–1.2 V is evaluated through numerical and analytical simulation. The results demonstrate the feasibility of fabrication. Further the gripper is made of polysilicon which allows operating the gripper at lower voltage.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
MEMS/NEMS technologies are gaining more and more attention over the past several decades. MEMS research and development community has made significant advances in standard micro-machining techniques (Leondes 2006). Microgrippers are integrated devices that manipulate the micro objects by interaction of multiple physics fields, typically through electric, electrothermal, piezoelectric, electrostatic, shape memory, electromagnetic, magnetostatic effects etc. Microgripper are widely in use in robotics and handling the micro parts of alloys and metals in micro manufacturing industries. Microgrippers also find many applications in optical fibers alignments, micro-fluidics, micro relays, micro assembly and miniature of medical instrumentation (Atashzaban and Nasiri 2013; Shi et al. 2013). In biomedical field microgrippers are widely used to grasp the surgical tools, force sensing, manipulation of the tissues and biological cells (Jericho et al. 2004; Zhang et al. 2013). Biological cells inside human body and plants are subjected to continuous stimulation and changes (e.g. bone cells are subjected to continuous stretching and compression during work, cardiac cells during pumping of the blood subject to continuous stretching and compression, muscle cells). Microgrippers are widely used to study the behavior and mechanical properties of the cell populations and single cells (Iamoni and Soma 2014).
As per application, geometrical structure, actuation method and voltage range of the gripper are subject to change. In microgripping devices compatibility with available standard IC technology is also required for characterization of various parameters of the device. For gripper to be compatible with the IC technology, material used to design the gripper should be compatible with IC fabrication technology and the gripper should be able to actuate at low voltages typically 1–5 V. Earlier investigations proved that the performance of microgripper depends on the method of actuation, material properties, part geometry and the kinematic behaviour of the design (Luo et al. 2005; Volland et al. 2002).
MEMS motion and actuation has traditionally been achieved electrostatically using comb drive or parallel-plate actuation techniques which moves with the applied actuation voltage. Electrostatic actuation method typically provides a small force per unit area (<100 µN) and requires a high actuation voltage (>30 V) which is not compatible with standard IC voltage (Khan et al. 2010; Boudaoud et al. 2013). To increase the output force requires the large number of comb drives which causes difficulty while fabricating the device and also requires the large chip size (Chang et al. 2013). Electromagnetic actuators are large in size and they are meso-scale grippers rather than microgrippers because of insufficient scalable force generation in micro domain (Steiner et al. 2015). In micro-domain small dimensions of electromagnetic actuator causes rapid heating of the coil due to the joule heating and low allowable currents; the resulting generally weak and subjected to leakages, giving small power per unit volume (Nonaka et al. 2004).
Piezoelectric actuator can generate large actuation force but the number of strokes is limited in actuation so most of the times they need an external arrangement to amplify the displacement amplitude. This amplifying mechanism unfortunately reduces the actuation force. PZT actuators require high input voltage so they need an external voltage amplifiers and this high voltage is not compatible with IC technology (Zubir et al. 2009; Sun et al. 2014; Wang et al. 2013). Electrothermal actuators are one of the most attractive microactuators as they can deliver a high specific work (force–displacement product per volume) at low voltages with low consumption of power when compared to other types of microactuators (Zhang et al. 2011; Lai et al. 2004). Depending on the motion required, two types of actuators are proposed in literature: In-plane and out of plane (Varona et al. 2009). Electrothermal actuator is based on the joule effect in the presence of the electric currents. Electrothermal actuation heats up the gripping jaws so the gripping jaws can be made of an insulating material with custom fabrication process (Que et al. 2001) or coated with some good insulating materials. This makes them enable to handle and manipulate the objects without changing their physical properties.
A U-shape electrothermal actuator has one hot arm and one cold arm which are connected to gripping jaws. Due to the difference in the surface area of cold and hot arm, resistances of the arms are different which in turn causes unequal current density in two arms. This leads to different amounts of thermal expansion in both arms which leads to displace the gripping jaws and used to achieve gripping motion (Lai et al. 2004; Wang et al. 2015). But this displacement is not restricted to one ideal dimension and sensitivity is low as well. To get high displacement and force it needs to be actuate at higher voltage which is not compatible with IC technology and high temperature are also an important issue to be take into the consider. Unlike a U-shape electrothermal actuator the chevron actuator is a symmetric actuator and based on uniform joule’s heating and thermal expansion of beams. A chevron actuator consists of multiple chevron beams tilted at some pre-bending angle and apexes of these beams are joined with shuttle and anchors. The displacement of any chevron actuator depends on length of the chevron beams but due to buckling and stiction problem length of the beam is limited (Zhu et al. 2006). Number of beams in chevron actuators is also limited due to increase in stiffness of structure and the relatively long “shuttle” hence the degradation in thermal expansion (Kwan et al. 2012). An asymmetric ‘U’ shape electrothermal actuator can generate force up to some µN but a chevron actuator can generate force up to hundreds of µN to mN by inclusion of multiple chevron beams (Sinclair et al. 2000; Que et al. 1999). In this paper, a chevron electrothermally actuated microgripper is proposed with heat sink which produces a sufficient large and linear displacement with a scalable force at lower temperatures to grip the micro objects. The gripper has been modelled and simulated using MEMS CAD tool CoventorWare.
2 Working principle of microgripper
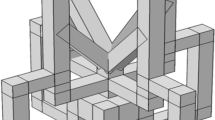
The proposed microgripper shown in Fig. 1 is designed with a chevron actuator, heat sinks and gripping arms. Chevron actuator has an array of In-plane micro-fabricated bent-beams and a shuttle. The gripping action is achieved by simultaneously actuating both the jaws in the gripper. The apexes of bent beams are mechanically linked to the anchors and shuttle. The anchors not only work as heat sinks and electrical contacts, it provides rigid mechanical support to the overall structure. The heat sink on each shuttle is used to dissipate the excessive heat produced in the shuttle which allows manipulating the micro objects at low temperature. The shuttle is connected to middle of the gripping arm and the gripping jaws are connected at the free end of the gripping arm to grasp the micro object.

Schematic diagram of a microgripper with clamped-free gripping arms and heat sinks
When a dc potential is applied across the anchors, due to finite resistivity of the beams, heat is generated in beams and the shuttle. In chevron actuator, distribution of generated heat is parabolic and causes a temperature difference between anchors, beams and shuttle. The apexes of the beams which are connected to the shuttle experiences the high temperature whereas anchors are kept constant at room temperature. The temperature difference between the beams and anchor induces a thermal expansion in the bent beams which and owing to this thermal expansion the shuttle moves and actuates the gripping arms.
The gripping actuation force is generated at the tip of the apexes which is transferred to the gripping arm via shuttle. To grip the micro objects two chevron actuators are thermally actuated at the same time which produces the displacement of equal magnitude in a direction opposite to each other. Generated gripping force is the summation of force generated by all the beams in chevron actuator. This force moves both the shuttles simultaneously which actuates the gripping arm and provides the required motion for gripping. The number of beams in chevron actutor is restricted to limit the stiffness of the overall structure. The number of beams are also restricted as it increases the size of the shuttle which in turn increase the stiffness of the structure and reduces the magnitude of the displacement produced by chevron actuator.
3 Modelling of microgripper
Analysis of a thermal actuator is an interdisciplinary field. To analyze the behavior of an electrothermal actuator a coupled electric, thermal and mechanical investigations are needed. In this section thermal and mechanical behavior of the device is analytically found on the basis of the following assumptions: The central shuttle is rigid and not thermally expanded by the temperature; In electrothermal actuators the heat loss is assumed due to thermal conduction through the thin air layer between actuator bottom side and substrate; Heat loss in bent beams through radiation is very less and assumed to be neglected; small strains and displacement are considered and the shear deformation of the beams is negligible (Zhu et al. 2006), i.e. an infinite shear stiffness is assumed.
Consider a chevron electrothermal actuator having a single bent beam as shown in Fig. 2. When a potential is applied across the anchors it causes a temperature difference among anchor, beam and shuttle due to joule heating. The maximum temperature of the shuttle is \(T_{M}\), temperature of anchor is \(T_{0}\), V is the voltage applied across anchors, \(I_{dc}\) is the current flow through it, L is the length of the bent beam, A is the cross sectional area of the beam, θ is the pre bending beam angle and R is the resistance of the beam. The change in the length of the bent beam due to thermal expansion is ∆L and ∆y is the movement of the shuttle.

A single bent beam actuator configuration
The temperature distribution along the bent beam is given by (Lai et al. 2004) a second order differential equation
where \(k_{\text{air}}\) is the thermal conductivity of the air and is the thermal conductivity of the polysilicon and their values are given in Table 2. T is the temperature difference relative to the substrate, P is the cross-sectional perimeter of the beam and ∆z is the vertical gap between beam and substrate.
In chevron actuator if the heat sinks (anchors) are located at the point \(x = - L\) and \(x = L\), and \(T( - L) = T(L) = T{}_{0}\) then the temperature distribution across the bent beam \(T(x)\) is found by solving the Eq. (1) as
where \(\omega = \frac{{k_{\text{air}} P/2}}{{Ak_{\text{poly}} \Delta z}}\).
The increase in length ∆L of the bent beam due to thermal expansion is given by
where \(\alpha\) is the thermal expansion coefficient of polysilicon, and \(T_{\text{avg}}\) is the average temperature increase in the bent beams and is given as
The displacement of the gripping jaws due to the thermal expansion of the bent beams caused by the increase in average temperature is given by (Zhu et al. 2006);
where A is the area of the bent beam and I is the moment of inertia of the bent beam \(I = BT^{3} /12\).
The change in the pre-bending angle θ after expansion of the chevron beams is given as
where, \(a = L\cos \theta\) is the horizontal distance between anchor and shuttle and \(\theta^{\prime}\) is the bending beam angle after expansion of beams. The stiffness of the chevron actuator (\(K_{CHV}\)) and the force generated by the chevron actuator (\(F_{CHV}\)) having N pairs of bent beams with m pairs of heat sinks connected to the shuttle is given by (Zhu et al. 2006)
where, \(K_{CHV}\) is the overall stiffness of chevron actuator, E is the Young’s modulus of the polysilicon material, H and B is the thickness and width of the chevron beam and l, h and b is the length, thickness and width of the heat sink.
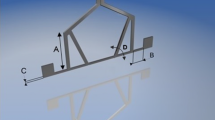
The force generated by the chevron actuator is applied at the center of the gripping arm through the shuttle as shown in Fig. 1. The length of the gripping jaw is too small as compare to the length of the gripping arm; hence in calculating the displacement and force generated by the gripping arm, the length of the jaw is neglected. In computing the displacement and force of the gripping arm, the gripping arm is considered as a cantilever beam as one end is fixed to the substrate and another end is free to move as shown in Fig. 3. The displacement y and force F at the free end of gripping arm is given by

Approximate model of clamped-free gripping arm with input force
where \(l_{a}^{{}}\) is length and \(I_{a} (I_{a} = b_{a} t_{a}^{3} /12)\) is the moment of inertia of the gripping arm and \(b_{a}\), \(t_{a}\) is the width and thickness of the gripping arm. From Eqs. (5), (9) and (11) the force F is found to be
4 Design and modeling
The microgripper shown in Fig. 1 is designed, modelled and simulated using MEMS CAD tool CoventorWare. The dimensions and the material properties of microgripper is given in Tables 1 and 2. The 3-D model of the microgripper is designed and developed by defining a process step as shown in Fig. 4. The features of the process steps are: (a) minimum size of any feature in the structure and gap between structural layers is 10 µm. This minimal gap is good to incorporate more number of chevron beams in the device to actuate the shuttle. (b) Option for device layer thickness is up to 25 µm which gives the flexibility to make hanging gripper jaws and makes the beams stiffer so that bent beams do not droop into the trench. (c) The gripping area of the device is made large enough so that it can hold the entire micropart and provide enough stability to the device. The 3-D model of the microgripper is shown in Fig. 5

Process steps for microgripper design

3-D model of the microgripper showing the clamped-free gripping arms and heat sinks
5 Results and discussion
The Performance of the gripper is analyzed through the simulation using the electro-thermo mechanical solver in CoventorWare software. The simulation is carried out by applying 1 V across the anchors at a constant temperature of 300 K and the simulation results are shown in Fig. 6a. The simulation results show the total displacement produced by the gripper is 19.2 µm. The gripping displacement produced by each chevron actuator is 9.6 µm as shown in Fig. 6b.

Displacement of the microgripper at 1 V; a result showing displacement of the microgripper b result showing displacement of single arm of the microgripper
To evaluate the gripping phenomena of the microgripper the design, modelling and simulation is carried out by keeping the gap between the gripping jaws as 100 µm with an object having a radius of 41 µm as shown in Fig. 7a. The simulation is carried out by applying 0.5 and 1 V across the anchors at a constant temperature of 300 K and the simulation results are shown in Fig. 7b, c. It can be seen from Fig. 7b, c that the object is not gripped for 0.5 V and it is gripped for 1 V.

Displacement of gripping jaws a when no voltage is applied; b at 0.5 V; c at 1 V
Parametric analysis is performed by sweeping the voltage applied across the anchors from 0 to 1.2 V. The displacement of the gripping jaws, the temperature distribution in the shuttle and the force generated at the gripping jaws are evaluated through numerical simulation using CoventorWare and are compared with analytical results obtained using Eqs. (6), (5) and (12) are shown in Figs. 8, 9 and 10. The numerical simulation results are in close agreement with the analytical results. The temperature at the gripping jaws is important as it handles the micro object. The simulation results shown in Fig. 11 shows that the gripping jaws temperature is lower (480 K) compare to the temperature of the shuttle (590 K). The reduction in temperature at gripping jaws is due to the disipation of the heat by the heat sinks attached to shuttle. The force generated is in the range of 0–17 mN which is much higher as compared to the force generated (100–500 µN) by conventional ‘U’ type electrothermal or electrostatically actuated microgripper.

Voltage-displacement characteristics of the microgripper

Voltage-temperature characteristics of the shuttle

Voltage-force characteristics of the microgripper

Result showing temperature distribution in the microgripper at 1 V
The effect of pre-bending angle θ in gripping displacement and the force generated by the gripping jaws is evaluated analytically using Eqs. (6) and (12) for the applied voltage of 1 V i.e. \(T_{\text{avg}}\) of 520 K and the results are shown in Figs. 12 and 13. The results show that the chevron actuator exhibits the linear relationship at pre-bending angle of 2.2–3º. From the results one can observe that at smaller pre-bending angle the higher displacement and force can be achieved from the chevron actuator but small pre-bending angle can increase the possibility of buckling of the bent beams.

Change in the displacement with the variation in the pre-bending angle at a constant voltage

Change in the gripping force with the variation in the pre-bending angle at a constant voltage
Von mises stress is the maximum stress occurs at any part of the device. It should be far less than the yield strength of the single crystal of the material which ensures the stable operation of the device without any fracture in the device. The Von Mises stress distribution in the microgripping device is evaluated at 1.2 V (max. voltage applied) and the maximum stress is found to be 470 MPa which is less than the yield strength of the single crystal polysilicon that is 7 GPa.
6 Conclusion
A chevron electrothermally actuated microgripper is designed for gripping application using two in-plane chevron actuators. The temperature at the gripping jaws is reduced by including the heat sinks in the shuttle. The force generated by the gripper is in the range of 0–17mN for the applied voltage of 0–1.2 V. A higher gripping force is achieved by fixing the one end of the gripping arm as compared to the free–free gripping arms. The simulation results for voltage-displacement, voltage-force and voltage-temperature characteristics obtained from numerical model and analytical model are in close agreement. The design modifications proposed in this work provides reduced temperature at the gripping jaws and improved gripping force which improves the overall performance of the microgripper. The pre-bending angle of 2.2° is selected to avoid the buckling in the bent beams. The displacement and force of the gripper is found to be high for the pre-bending angle of 2.2° of the bent beam and it is found to decrease for further increase in pre-bending angle. The magnitude of the displacement produced by each chevron actuator 9.6 µm and it is in opposite to each other this provides the maximum gripping displacement of 19.2 µm at 1 V.
References
Atashzaban E, Nasiri M (2013) A novel MEMS based linear actuator for mirror shape correction application. J Opt 42(3):247–256
Boudaoud M, Haddab Y, Gorrec YL (2013) Modeling and optimal force control of a nonlinear electrostatic microgripper. IEEE ASME Trans Mechatron 18(3):1130–1139
Chang H, Zhao H, Ye F, Yuan G, Xie J, Kraft M, Yuan W (2013) A rotary comb-actuated microgripper with a large displacement range. Microsyst Technol 20(1):119–126
Iamoni S, Soma A (2014) Design of an electro-thermally actuated cell microgripper. Microsyst Technol 20:869–877
Jericho SK, Jericho MH, Hubbard T, Kujath M (2004) Microtweezers for the manipulation of bacteria and small particles. Rev Sci Instrum 75:1280
Khan F, Bazaz SA, Sohail M (2010) Design, implementation and testing of electrostatic SOI MUMPs based microgripper. Microsyst Technol 16:1957–1965
Kwan AMH, Song S, Lu X, The YK, Teh YF, Chong EWC, Gao Y, Hau W, Zeng F, Wong M, Huang C, Taniyama A, Makino Y, Nishino S, Tsuchiya T, Tabata O (2012) Improved Design for an Electrothermal In-Plane Microactuator. J Microelectromech S 21(3):586–593
Lai Y, McDonald J, Kujath M, Hubbard T (2004) Force, deflection and power measurements of toggled microthermal actuators. J Micromech Microeng 14:49–56
Leondes CT (2006) MEMS/NEMS Handbook Techniques and Applications, Springer
Luo JK, Flewitt AJ, Spearing SH, Fleck NA, Milne WI (2005) Comparsion of microtweezers based on three lateral thermal actuator configurations. J Micromech Microeng 15:1294–1302
Nonaka K, Sakai K, Baillieul J (2004) Open loop oscillatory control for electromagnetic actuated microgrippers. Proc SICE Ann Conf 3:2285–2290
Que L, Park JS, Gianchandani YB (1999) Bent-beam electrothermal actuators for high force application. In: Proceedings of Twelfth IEEE International conference on Micro electro mechanical systems, pp 31–36
Que L, Park JS, Gianchandani YB (2001) Bent-beam electrothermal actuators-Part I: single beam and cascaded devices. J Microelectromech S 10(2):247–254
Shi X, Chen W, Zhang J, Chen W (2013) Design, modeling, and simulation of a 2-d of microgripper for grasping and rotating of optical fibers. In: Proceedings of IEEE/ASME International conference on advanced intelligent mechatronics (AIM) Wollongong Australia, pp 1597–1602
Sinclair MJ (2000) A high force low area MEMS Thermal Actuaor. Sev Intersoc Conf Therm Thermomech Phenom Electron Sys ITHERM 1:127–132
Steiner H, Stifter M, Hortschitz W, Keplinger F (2015) Planar magnetostrictive micromechanical actuator. IEEE T Magn 51(1):1–4
Sun X, Chen W, Fatikow S, Tian Y, Zhou R, Zhang J, Mikczinski M (2014) A novel piezo-driven microgripper with a large jaw displacement. Microsyst Technol, pp 1–12
Varona Jorge V, Tecpoyotl-Torres M, Hamoui AA (2009) Design of MEMS vertical–horizontal chevron thermal actuators. Sensor Actuat A Phys 153(1):127–130
Volland BE, Heerlein H, Rangelow IW (2002) Electrostatically driven microgripper. Microelectron Eng 61–62:1015–1023
Wang DH, Yang Q, Dong HM (2013) A Monolithic Compliant Piezoelectric-Driven Microgripper: design, Modeling, and Testing. IEEE ASME Trans Mechatron 18(1):138–147
Wang Z, Shen X, Chen X (2015) Design, modeling, and characterization of a MEMS electrothermal microgripper. Microsyst Technol, pp 1–8
Zhang R, Chu JK, Chen ZP (2011) A novel SU-8 electrothermal microgripper based on type synthesis of kinematic chain method. In: Proceedings of 16th international conference (Transducers) of Solid-state sensors, actuators and microsystems, pp 466–469
Zhang R, Chu J, Wang H, Chen Z (2013) A multipurpose electrothermal microgripper for biological micro-manipulation. Microsyst Technol 19:89–97
Zhu Y, Corigliano A, Espinosa HD (2006) A thermal actuator for nanoscale in situ microscopy testing: design and characterization. J Micromech Microeng 16(2):242–253
Zubir MNM, Shirinzadeh B, Tian Y (2009) A new design of piezoelectric driven compliant-based microgripper for micromanipulation. Mech Mach Theory 44:2248–2264
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Shivhare, P., Uma, G. & Umapathy, M. Design enhancement of a chevron electrothermally actuated microgripper for improved gripping performance. Microsyst Technol 22, 2623–2631 (2016). https://doi.org/10.1007/s00542-015-2561-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-015-2561-0