
Abstract
Input–output finite-time stability (IO-FTS) of fractional-order positive switched systems (FOPSS) is investigated in this paper. First of all, the concept of IO-FTS is extended to FOPSS. Then, by using co-positive Lyapunov functional method together with average dwell time approach, some sufficient conditions of input–output finite-time stability for the considered system are derived. Furthermore, the state feedback controller and the static output feedback controller are designed, and sufficient conditions are presented to ensure that the corresponding closed-loop system is input–output finite-time stable. These conditions can be easily obtained by linear programming. Finally, three numerical examples are given to show the effectiveness of the theoretical results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The concept of fractional calculus and its application have been widely studied during the past three decades. Many people have made outstanding contributions for the development of fractional-order theory [6, 7, 11, 13, 23, 25]. Among them, Hilfer puts forward fractional-order models which are applied in viscoelastic systems, dielectric polarization and electromagnetic [7], and Podlubny involves in fractional-order control such as \(PI^\lambda D^\mu \) controller [23]. References [6, 11, 13, 25] mainly introduce basic theory of fractional-order integrals and derivations. In some practical applications, fractional calculus is more available than integer calculus for the behavior of systems, such as fractional-order biological systems, fractional-order Chua’s circuit, fractional electrical networks, robotics and other areas. At the same time, there have been lots of interesting results for fractional-order systems (see [14, 17, 18, 22, 26, 34] and the reference therein). These results mentioned above refer to stability [26, 34] and robust control [14, 22]. In [17, 18], new admissibility conditions of fractional-order systems have, respectively, addressed with order \(0<\alpha <1\) and \(1<\alpha <2\).
As we all know, switched systems are composed of a family of subsystems and a logical rule. Positive systems are dynamical systems whose state and output variables remain non-negative for future time interval whenever their initial conditions and inputs are non-negative. Therefore, some researchers have investigated the fractional-order positive systems [3, 19] and fractional-order positive switched systems [8, 32]. For example, stabilization of continuous-time fractional positive systems is addressed by using a Lyapunov function in [3], and positive fractional variable-order discrete-time systems are presented in [19]. However, stability of fractional-order switching systems is solved in frequency domain [8]. State-dependent switching control is discussed for switched positive fractional-order systems by using the sliding sector method in [32]. For normal systems, Lyapunov function and average dwell time (ADT) approach are always used to solve switched systems (see [5, 29, 34] and the reference cited in). But there are very few articles to solve the control problems of fractional-order positive switched systems by using Lyapunov functional method and ADT approach.
It is worth noting that the above results are focused on asymptotic stability and exponential stability, which reflect the behavior of the system in an infinite-time interval. However, in many practical applications, the systems happen in finite-time interval. Peter has firstly proposed the concept of finite-time stability [24], which requires that the state does not exceed a certain threshold over a appointed time interval. It should be put forward that sometimes only the output, not the state needs to be restrained within a bound. So, the concept of input–output finite-time stability (IO-FTS) is introduced in [1]. It is necessary to study the problem of IO-FTS [2, 4, 9, 15, 16, 20, 28, 30, 33]. These results are involved in singular systems [30], impulsive jump systems [2] and Markovian systems [28]. In addition, the IO-FTS of positive switched systems with time-varying and distributed delay is proposed in [15], and discrete-time impulsive switched linear systems with state delays are solved in [9].
The concept of input–output finite-time stability is also extended to fractional-order systems in [20]. Recently, considerable attention is focused on fractional-order positive switched systems, which are discussed with order between 0 and 1 based on ADT. The guaranteed cost finite-time control of fractional-order positive switched systems is considered in [16]. Finite-time stability and stabilization of fractional-order positive switched system is reported in [33]. Global exponential stability and stabilization of fractional-order positive switched system is given in [4]. Since the systems are inevitably affected by external factors , it is necessary to consider the systems with disturbance. However, to our best knowledge, the result on the control problem of IO-FTS for fractional-order positive switched systems (FOPSS) with disturbance has not been investigated yet, which motivates our present paper.
From the above, this paper focuses on the IO-FTS for fractional-order positive switched system with order between 0 and 1 based on ADT. The challenges we face are how to establish Lyapunov function, how to deal with the disturbance and how to design the average dwell time switching signal. The main advantages of this paper are as follows: (i) The definition of IO-FTS is firstly extended to fractional-order positive switched systems; (ii) by using ADT approach and multiple co-positive Lyapunov functional method, two kinds of feedback controllers (state feedback controller and static output feedback controller) are designed. The rest of this paper is organized as follows: In Sect. 2, problem statements and preliminaries are introduced. Some sufficient conditions guaranteeing the IO-FTS of the considered systems are given in Sect. 3. Three numerical examples are provided to illustrate the effectiveness of obtained results in Sect. 4. In Sect. 5, conclusion is drawn.
Notations: Throughout this paper, \(\mathbb {R}^n\) is the n-dimensional Euclidean space. \(\mathbb {R}^{n\times s}\) is the set of all \((n\times s)\) dimensional real matrices. \(\mathbb {R}^{n}_{+}\) is the set of n-dimensional real nonnegative vectors. \(A\succ 0\)\((A\succeq 0)\) means that all the elements of A are positive (non-negative). \(A\succ B\)\((A\succeq B)\) means that \(A-B\succ 0\)\((A-B\succeq 0)\). In a similar way, we can define \(A\prec 0\)\((A\preceq 0)\), \(A\prec B\)\((A\preceq B)\). \(A^T\) denotes the transpose of matrix A. \(\varGamma (\cdot )\) denotes the Gamma function. Let \(x\in \mathbb {R}^n\), \(L_{\infty ,[0,T]}\) denote the space of the uniformly bounded vector-valued functions on the interval [0, T]; that is, \(s(t)\in L_{\infty ,[0,T]}\) if \(\max _{t\in [0,T]}\parallel w(t) \parallel <\infty \) holds. Matrices have compatible dimensions if there are no special statements.
2 Problem Statements and Preliminaries
Fractional-order calculus is the generalization of integer-order calculus. There are some different definitions of the fractional-order derivative. The commonly used definitions are Grunwald–Letnikov, Riemann–Liouville and Caputo definitions. We mainly use Caputo and Riemann–Liouville fractional-order derivative in this paper.
Definition 1
[20] The uniform formula of a fractional integral with \(\alpha \in (0, 1)\) is defined as
where f(t) is an arbitrary integrate function, \({_{t_{0}}I^{\alpha }_{t}}\) is the fractional integral of order \(\alpha \) on \([t_{0}, t]\) and \(\varGamma (\cdot )\) is Gamma function, \(\varGamma (s)=\int _{0}^{\infty }t^{s-1}e^{-t}\mathrm{d}t\).
Definition 2
[20] Caputo (C) definition of fractional derivative with \(\alpha \in (0, 1)\) is given as
\({_{t_{0}}^{C}D^{\alpha }_{t}}\) represents Caputo (C) fractional derivatives of order \(\alpha \) of f(t) on \([t_0, t]\).
Definition 3
[16] Riemann–Liouville (RL) definition of fractional derivation with \(\alpha \in (0,1)\) is given as
\({_{t_{0}}^{RL}D^{\alpha }_{t}}\) represents Riemann–Liouville (RL) fractional derivatives of order \(\alpha \) of f(t) on \([t_0, t]\).
From the above two definitions, we can obtain the following relations between them:
Lemma 1
[16] Let \(\alpha \in (0,1)\); if \(f(0)\ge 0\), then \({_{t_{0}}^{C}D^{\alpha }_{t}}f(t)\le {_{t_{0}}^{RL}D^{\alpha }_{t}}f(t)\).
Consider the following FOPSS :
where \(x(t)\in \mathbb {R}^n\), \(u(t)\in \mathbb {R}^m\) and \(y(t)\in \mathbb {R}^z\) represent the system state, the control input and the measure output, respectively. \(\sigma (t) : [0, \infty )\longrightarrow N=\{1, 2,\ldots , n\}\) is switching signal of the system, where N is the number of the subsystems; \(\forall {p}\in N\), \(A_{p}\), \(B_{p}\), \(E_{p}\) and \(C_{p}\) are constant matrices with appropriate dimensions. p denotes the pth systems, and \(t_{q}\) denotes the qth switching instant. \(w(t)\in \mathbb {R}^l\) is the exogenous disturbance and defined as
with a known scalar \(d>0\).
Assumption 1
For the system (5), \(A_{p}\) (\(\forall p\in N\)) are Metzler matrices, \(B_{p}\succeq 0\), \(E_{p}\succeq 0\) and \(C_{p}\succeq 0\).
Definition 4
[15] System (5) is said to be positive if for any switching signals \(\sigma (t)\), initial condition \(x(t_{0})\succeq 0\), and disturbance input \(w(t)\succeq 0\), the corresponding trajectory satisfies \(x(t)\succeq 0\) and \(y(t)\succeq 0\) for all \(t\ge 0\).
Lemma 2
[16] A matrix is a Metzler matrix if and only if there exists a positive constant \(\varsigma \) such that \(A+\varsigma {I_{n}}\ge 0\).
Definition 5
[4] For any switching signals \(\sigma (t)\) and \(T_{2}\ge T_{1}\ge 0\), let \(N_{\sigma (t)}(T_{1},T_{2})\) denote the switching numbers of \(\sigma (t)\) over the interval \([T_{1}, T_{2}]\). If there exist \(N_{0}\ge 0\) and \(T_{\alpha }\ge 0\) such that
then \(\tau _{\alpha }\) are called average dwell time (ADT), and \(N_{0}\) are called chattering bound. Generally speaking, we choose \(N_{0}=0\) in the paper.
Lemma 3
[33] System (5) is positive if and only if \(A_{p}\) (\(\forall p\in N\)) are Metzler matrices and \(\forall p\in N\), \(B_{p}\succeq 0\), \(E_{p}\succeq 0\), and \(C_{p}\succeq 0\).
Definition 6
(IO-FTS) (Consider zero initial condition \(x(0)=0\)) For a given time constant \(T_{f}\), disturbances signals \(W_{1}\) defined by (6), and a vector \(\varepsilon >0\); System (5) is said to be input–output finite-time stable (IO-FTS) with respect to \((\varepsilon , T_{f}, d, \sigma (t))\), if
Lemma 4
[27] (Gronwall–Bellman inequality) Let f(t) and g(t) be continuous real-valued functions and non-negative in \(a\le t\le b\). If k is a nonnegative constant and f(t) satisfies the integral inequality
then
Lemma 5
[21] From the definition of fractional integrals and Caputo derivatives, \(k-1<\alpha <k\), we have
in particular, when \(0<\alpha <1\),
where \(I^\alpha \) represents \(_{t_{0}}I^\alpha _{t}\), and \(D^\alpha \) represents \(_{t_{0}}^C D^\alpha _{t}\).
Lemma 6
[4] (\(C_{p}\) inequality) For \(0<a<1\) and any positive real numbers \(x_{1}\), \(x_{2}\), ..., \(x_{k}\)
Lemma 7
[33] (Young’s inequality) For any positive real numbers a, b and any real number x, y, it holds that
3 Main Results
The purpose of this paper is to design the state feedback controller \(u(t)=K_{1\sigma (t)}x(t)\), the static output feedback controller \(u(t)=K_{2\sigma (t)}y(t)\) and a class of switching signals \(\sigma (t)\) for FOPSS (5) such that the corresponding closed-loop system is input–output finite-time stable.
3.1 Input–Output Finite-Time Stability Analysis
In this subsection, we will focus on the problem of IO-FTS for FOPSS (5) with \(u(t)\equiv 0\).
Theorem 1
Consider the system (5). Given positive constants \(T_{f}\), \(\lambda (\lambda >1)\), \(\mu \ge 1\) and vector \(\varepsilon >0\), if there exist positive vectors \(v_{p}\) and \(\forall {p}\in N\), such that the following inequalities hold:
and the average dwell time of the switching signal \(\sigma (t)\) satisfies
then the FOPSS (5) is input–output finite-time stable, where
Proof
According to Lemma 3 and Assumption 1, each subsystem of the switched system (5) is positive. Construct the multiple linear co-positive Lyapunov function for the system (5) as follows:
where \(v_{p}\in \mathbb {R}^n_{+}\). Denote \(t_{0}\), \(t_{1}\), \(t_{2}\), ..., \(t_{k}\) (we choose \(t_{0}=0\)) as the switching instants over the interval \([0, T_{f}]\). Along the trajectory of the system (5), we have
From (3.1a) and (3.1b), which implies that
Taking the fractional integral \(_{t_{0}}{I}^{\alpha }_t\) to both sides of (18) yields for \(t\in [t_{m}, t_{m+1}]\)
By Lemma 4, we know
From (3.1c), we get the following inequality
By a similar method, together with \(\exp \{\frac{\mu }{\varGamma (\alpha +1)}(t-t_{m})^\alpha \}\ge 0\), we obtain
due to \(t-t_{0}\le T_{f}\) (\(t\le T_{f}\)). Let \( x(0)=0 \) , then \(\tau _{\alpha }\ge \frac{\delta }{\ln {\varGamma (\alpha )}-\ln ({{T_{f}}^{\alpha -1}}{rd})-\eta }\),
From Definition 6, we can obtain that the system (5) is IO-FTS with \((\varepsilon , T_{f}, d, \sigma (t))\). Thus, this completes the proof. \(\square \)
Remark 1
It is noted that the conditions (3.1a) and (3.1c) are the same as those in [10, 15, 33]. No matter normal positive switched systems or fractional-order positive switched systems, conditions (3.1a) and (3.1c) are indispensable. Especially, when \(\alpha =1\), it is proved that Theorem 1 is consistent with the results of input–output finite-time control of positive switched without time-varying and distributed delays in [15]. Therefore, it is easy to see that IO-FTS of FOPSS is the generalization of IO-FTS on integer-order positive switched systems. However, there are many differences between FOPSS and normal positive switched systems. We can know the former is more complex and challenge from references [33] and the proof of Theorem 1.
Remark 2
In reference [10, 15], there are two kinds of definitions for exogenous disturbance input w(t), respectively. \(L_{p}\) space and \(L_{\infty }\) space are adopted in discrete positive switched systems (non-fractional-order systems) [10], and \(L_{1}\) space and \(L_{\infty }\) space are used in continuous positive switched systems (non-fractional-order systems) [15]. Owing to the special definition of fractional-order integral, \(L_{p}\) space and \(L_{1}\) space can not specifically defined up to now. So, we require the exogenous disturbance input belonging to \(L_{\infty }\) space in this paper. That is, condition (6) is employed. In previous works [5, 9, 10, 15, 30], the stability problems of switched systems with delays (non-fractional-order systems) are addressed based on Lyapunov functions approach. However, for fractional-order switched systems with delays, two problems have not been solved. The first problem is how to express Lyapunov functions; the second one is how to calculate variable limit integral item. Therefore, the problems of fractional-order switched systems with delays remain open. In the future work, it may be a interesting topic.
Remark 3
In the proof of Theorem 1, equality \(I^\alpha (D^\alpha x(t))=x(t)-x(t_{0})\) is used. By Lemma 4, we can know the papers is investigated for Caputo derivative with order \(0<\alpha <1\). However, from the relationship between Caputo and Riemann–Liouville fractional derivatives in Lemma 1, Riemann–Liouville derivatives can also be applied to Theorem 1. So, the following conclusion holds.
Corollary 1
Replace \({_{t_{0}}^{C}D^{\alpha }_{t}}\) by \({_{t_{0}}^{RL}D^{\alpha }_{t}}\) in Theorem 1. If the conditions (3.1a)–(3.1d) and (15) hold, then the system (5) is IO-FTS with \((\varepsilon , T_{f}, d, \sigma (t))\).
Proof
By Lemma 1, we know
The other part of the proof is similar to that in Theorem 1 and omitted here. \(\square \)
In the following subsection, we will design two kinds of controllers. Consider the fractional-order switched systems as follows:
3.2 State Feedback Controller Design
For the system (24), designing the state feedback controller \(u(t)=K_{1\sigma (t)}x(t)\), such that the corresponding closed-loop system is
with \(A_{c\sigma (t)}=A_{\sigma (t)}+B_{\sigma (t)}K_{1\sigma (t)}\).
Theorem 2
Consider the system (25). Given positive constants \(T_{f}\), \(\lambda (\lambda >1)\), \(\mu \ge 1\) and vector \(\varepsilon >0\), if there exist positive vectors \(v_{p}\) and \(p\in N\), such that the following inequalities hold:
where \({A_{p}+B_{p}K_{1p}}\) are Metzler matrices. Then under ADT scheme (15), the FOPSS (25) is input–output finite-time stable, where \(f_{1p}=K_{1p}^T B_{p}^T v_{p}\).
Proof
By Lemma 3 and Assumption 1, we know the system (25) is positive. Replacing \(A_{p}\) in (3.1a) with \(A_{p}+B_{p}K_{1p}\), letting \(f_{1p}=K_{1p}^T B_{p}^T v_{p}\), then under the ADT (15), we easily know that the closed-loop system (25) is input–output finite-time stable. This completes the proof. \(\square \)
Corollary 2
Replace \({_{t_{0}}^{C}D^{\alpha }_{t}}\) by \({_{t_{0}}^{RL}D^{\alpha }_{t}}\) in Theorem 2. If the conditions (3.2a)–(3.2d) and (15) hold, then under the state feedback controller the corresponding closed-loop system (25) is IO-FTS with \((\varepsilon , T_{f}, d, \sigma (t))\).
3.3 Static Output Feedback Controller Design
Consider the system (24), under controller \(u(t)=K_{2\sigma (t)}y(t)\), the corresponding closed-loop system is given by
Theorem 3
Consider the system (26). Given positive constants \(T_{f}\), \(\lambda (\lambda >1)\), \(\mu \ge 1\) and vector \(\varepsilon >0\), if there exist positive vectors \(v_{p}\) and \(p\in N\), such that the following inequalities hold:
where \({A_{p}+B_{p}K_{2p}C_{p}}\) are Metzler matrices. Then under ADT scheme (15), the FOPSS (26) is input–output finite-time stable, where \(f_{2p}=C_{p}^T K_{2p}^T B_{p}^T v_{p}\).
Proof
By Lemma 3 and Assumption 1, we know the system (26) is positive. Replacing \(A_{p}\) in (3.1a) with \(A_{p}+B_{p}K_{2p}C_{p}\), letting \(f_{2p}=C_{p}^T K_{2p}^T B_{p}^T v_{p}\), then under the ADT (15), we easily know that the system (26) is input–output finite-time stable. This completes the proof. \(\square \)
Corollary 3
Replace \({_{t_{0}}^{C}D^{\alpha }_{t}}\) by \({_{t_{0}}^{RL}D^{\alpha }_{t}}\) in Theorem 3. If the conditions (3.3a)–(3.3d) and (15) hold, then under the output feedback controller the corresponding closed-loop system (26) is IO-FTS with \((\varepsilon , T_{f}, d, \sigma (t))\).
Remark 4
From above, two kinds of controllers are designed, and some sufficient conditions of IO-FTS for FOPSS are obtained by linear programming in Theorem 3 and 4. In practical applications, it is not always possible to obtain all state. So, static output feedback controller is better than state feedback controller. In the literature [4, 15], output feedback design approach is employed. obviously, it is easy to see that conditions (3.2a) and (3.3a) are not standard linear programming after disposed. But we convert nonlinear inequalities into linear inequalities by using variable substitution method.
Next, we show an algorithm to obtain the feedback gain matrices \(K_{1p}\) (or \(K_{2p})\).
Step 1 Giving the parameters \(\lambda \), \(\mu \) and solving (3.2a)–(3.2d) (or (3.3a)–(3.3d)) by linear programming, positive vectors \(v_{p}\) and \(f_{1p}\) (or \(f_{2p} \)) can be obtained.
Step 2 Substituting \(v_{p}\), \(f_{1p}\) (or \(f_{2p}\)) into \(f_{1p}=K_{1p}^T B_{p}^T v_{p}\) (or \(f_{2p}=C_{p}^T K_{2p}^T B_{p}^T v_{p}\)), \(K_{1p}\) (or \(K_{2p}\)) can be obtained.
Step 3 The gain \(K_{1p}\) (or \(K_{2p}\)) is substituted into \(A_{p}+B_{1p}K_{p}\) (or \(A_{p}+B_{p}K_{2p}C_{p}\)). If \(A_{p}+B_{p}K_{1p}\) (or \(A_{p}+B_{p}K_{2p}C_{p}\)) are Metzler matrices, the \(K_{1p}\) (or \(K_{2p}\) ) are acceptable. Otherwise, go to Step 1, then repeat Steps 2, 3.
4 Numerical Example
In this section, three examples will be given to illustrate the effectiveness of the proposed methods.
Example 1
Consider linear electrical circuits composed of resistors, supercondensators (ultra-capacitors), coils and voltage (current) sources. In practical problem, a circuit is always containing exogenous disturbance signals such as circuit aging, environment and human factors. Using the relations (2.82), (2.83) in [12] and Kirchhoff’s laws, a switching-type fractional linear circuits systems could be written by the system (5). Among them, \(x_{1}(t)\in \mathbb {R}^{n_{1}}\) represents voltages across the supercondensators; \(x_{2}(t)\in \mathbb {R}^{n_{2}}\) represents currents in coils; \(u(t)\in \mathbb {R}^m\) represents the voltages of the circuits. And the parameters are given as follows:
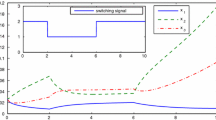
Let \(\alpha =0.5\), \(\mu =1\), \(\lambda =2\), \(T_{f}=10\), \(r=3\) and \(d=0.00001\). Solving the inequalities in Theorem 1 by linear programming, we get

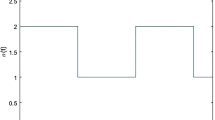
Switching signal of system (5)

State trajectories of system (5)

Step responses of system (5)

Evolution of \(y^T(t)\varepsilon \) of system (5)
It is easily verified that \(A_{p}\) are Metzler matrices for \(p=1,2\). Then according to (15), we can obtain \(\tau _{\alpha }^*=1.7884\). Choose \(\tau _{\alpha }=2>\tau _{\alpha }^*\). Let \(w(t)=e^{-0.5t}\sin {t}\). Figures 1, 2, 3 and 4 show the simulation results, where \(x(0)=[0 \quad 0 ]^T\). Switching signal of the system (5) with ADT is shown in Figure 1. State trajectories of the system (5) are depicted in Figure 2. Figure 3 plots step responses of the system (5). Figure 4 plots the evolution of \(y^T(t)\varepsilon \le 1\). From Figure 4, we know the system (5) is IO-FTS. It follows that the fractional electrical circuits systems (5) are positive and IO-FTS.
Example 2
Consider the system (25) under the state feedback controller \(u(t)=K_{1\sigma (t)}x(t)\), the parameters are given as follows:
Let \(\alpha =0.5\), \(\mu =1\), \(\lambda =1.5\), \(T_{f}=10\), \(r=4\) and \(d=0.00001\). Solving the inequalities in Theorem 2 by linear programming, we have

Switching signal of system (25)

State trajectories of system (25)

Step responses of system (25)

Evolution of \(y^T(t)\varepsilon \) of system (25)
It is easily verified that \(A_{p}+B_{p}K_{p}\) are Metzler matrices for \(p=1, 2\). Then according to (15), we can obtain \(\tau _{\alpha }^*=1.7181\). Choosing \(\tau _{\alpha }=2>\tau _{\alpha }^*\). Let \(w(t)=e^{-0.5t}\sin {t}\). Figures 5, 6, 7 and 8 show the simulation results, where \(x(0)=[0 \quad 0 ]^T\). Switching signal of the system (25) with ADT is shown in Fig. 5. State trajectories of the system (25) are depicted in Fig. 6. Figure 7 plots step responses of the system (25). Figure 8 plots the evolution of \(y^T(t)\varepsilon \le 1\). From Fig. 8, we know the system (25) is IO-FTS.
Example 3
Consider the system (26) under the output feedback controller \(u(t)=K_{2\sigma (t)}y(t)\), the parameters are given as follows:
Let \(\alpha =0.6\), \(\mu =1.1\), \(\lambda =1.5\), \(r=4\), \(T_{f}=10\) and \(d=0.00001\). Solving the inequalities in Theorem 3 by linear programming, we have

Switching signal of system (26)

State trajectories of system (26)

Step responses of system (26)

Evolution of \(y^T(t)\varepsilon \) of system (26)
It is easily verified that \(A_{p}+B_{p}K_{p}C_{p}\) are Metzler matrices for \(p=1,2\). Then according to (15), we can obtain \(\tau _{\alpha }^*=2.5174\). Choosing \(\tau _{\alpha }=2.7>\tau _{\alpha }^*\). Let \(w(t)=e^{-0.6t}\sin {t}\). Figures 9, 10, 11 and 12 show the simulation results, where \(x(0)=[0 \quad 0 ]^T\). Switching signal of the system (26) with ADT is shown in Fig. 9. State trajectories of the system (26) are depicted in Fig. 10. Figure 11 plots step responses of the system (26). Figure 12 plots the evolution of \(y^T(t)\varepsilon \le 1\). From Fig. 12, we know the system (26) is IO-FTS.
5 Conclusion
In the paper, we have dealt with the problem of IO-FTS for FOPSS with order between 0 and 1. By constructing multiple linear co-positive Lyapunov functions and using ADT approach, two kinds of controllers are designed, and some sufficient conditions in terms of linear programming are obtained to guarantee that the closed-loop system is IO-FTS. Finally, three examples are given to illustrate the effectiveness of the proposed methods.
Our future efforts will focus on input–output finite-time stability of fractional-order positive switched time-delay systems (or singular fractional-order positive switched systems). IO-FTS (or FTS, GES) of FOPSS with order between 1 and 2 may be interesting topics in the future study.
References
F. Amato, R. Ambrosino, C. Cosentino, G.D. Tommasi, Input-output finite-time stabilization of linear systems. Automatica 49(6), 1558–1562 (2010)
F. Amato, G.D. Tommasi, A. Pironti, Input-output finite-time stabilization of impulsive linear systems: necessary and sufficient conditions. Nonlinear Anal. Hybrid Syst. 19, 93–106 (2016)
A. Benzaouia, A. Hmamed, F. Mesquine, M. Benhayoun, F. Tadeo, Stabilization of continuous-time fractional positive systems by using a lyapunov function. IEEE Trans. Autom. Control 59(8), 2203–2208 (2014)
X.Y. Cao, L.P. Liu, H. Xiang, Global exponential stability and stabilization of fractional-order positive switched systems. Int. J. Innov. Res. Comput. Sci. Technol. 5(4), 333–338 (2016)
X.W. Chen, S.L. Du, L.D. Wang, L.D. Liu, Stabilization linear uncertain systems with switched time-varying delays. Neurocomputing 191, 296–303 (2016)
S. Das, Functional fractional calculus, 2nd edn. (Springer, Berlin, 2011), pp. 1–220
R. Hilfer, Applications of fractional calculus in physics (World Scientific, Hackensack, 2001), pp. 1–131
S.H. Hosseinnia, I. Tejado, B.M. Vinagre, Stability of fractional order switching systems. Comput. Math. Appl. 66, 585–596 (2013)
S. Huang, Z. Xiang, H.R. Karimi, Input-output finite-time stability of discrete-time impulsive switched linear systems with state delays. Circuits Syst. Signal Process. 33(1), 141–158 (2014)
S.P. Huang, H.R. Karimi, Z.P. Xiang, Input-output finite-time stability of positive switched linear systems with state delays, in 2013 9th Asian Control Conference (ASCC), pp. 1–6 (2013)
A.A. Kilbas, H.M. Srivastava, J.J. Trujillo, Theory and applications of fractional differential equations (Elsevier, New York, 2006)
T. Kaczorek, Selected problems of fractional systems theory (Springer, Berlin, 2012), pp. 48–54
V. Lakshmikanthama, A.S. Vatsala, Basic theory of fractional differential equations. Nonlinear Anal. 69, 2677–2682 (2008)
Y.H. Lan, Y. Zhou, LMI-based robust control of fractional order uncertain linear systems. Comput. Math. Appl. 62, 1460–1471 (2011)
L.P. Liu, X.Y. Cao, Z.M. Fu, S.Z. Song, Input-ouput finite-time control of positive switched systems with time-varying and distributed delays. J. Control Sci. Eng. 2017, 1–12 (2017)
L.P. Liu, X.Y. Cao, Z.M. Fu, S.Z. Song, Guaranteed cost finite-time control of fractional-order positive switched systems. Adv. Math. Phys. 3, 1–11 (2017)
S. Marir, M. Chadli, D. Bouagada, A novel approach of admissibility for singular linear continuous-time fractional-order systems. Int. J. Control Autom. 15(2), 959–964 (2017)
S. Marir, M. Chadli, D. Bouagada, New admissibility conditions for singular linear continuous-time fractional-order system. J. Frankl. Inst. 354, 752–766 (2017)
W. Malesza, Positive fractional variable order discrete-time systems. Int. Fed. Autom. Control (IFAC) 50(1), 8072–8076 (2017)
Y.J. Ma, B.W. Wu, Input-output finite time stability of fractional order linear systems with \(0<\alpha <1\). Trans. Inst. Meas. Control 39(5), 653–659 (2017)
Y.J. Ma, B.W. Wu, Y.E. Wang, Finite-time stability and finite time boundedness of fractional order linear systems. Neurocomputing 173(3), 2076–2082 (2016)
I. N’Doye, M. Darouach, M. Zasadzinski, N.E. Radhy, Robust stabilization of uncertain descriptor fractional-order systems. Automatica 49, 1907–1913 (2009)
I. Podlubny, Fractional differential equations (Academic Press, London, 1999)
D. Peter, Short time stability in linear time-varying systems. in Proceeding of the IRE International Convention Record Part 4, pp. 83–87 (2014)
S.G. Samko, A.A. Kilbas, O. Marichev, Fractional integrals and derivatives: theory and application (Gordon and Breach, Amsterdam, 1993)
R.A. Saris, Q.A. Mdallal, On the asymptotic stability of linear system of fractional order difference equations. Fract. Calc. Appl. Anal. 16(3), 613–629 (2013)
S.L. Si, Y.Y. Qiu, Q.Q. Li, A refinement of Gronwall–Bellman inequality. Pur. Math. 6(3), 238–242 (2016)
Z. Tang, F. Liu, Input-output finite-time stabilization of Markovian jump systems with convex polytopic switching probabilities. J. Frankl. Inst. 353(14), 3632–3640 (2016)
R. Wang, Y.T. Sun, P. Shi, S.N. Wu, Exponential stability of descriptor systems with large period based on a switching method. Inf. Sci. 286, 147–160 (2014)
J. Yao, J.E. Feng, L. Sun, Y. Zheng, Input-output finite time stability of time-varing linear singular systems. J. Control Theory Appl. 10(3), 287–291 (2011)
L.D. Zhao, J.B. Hu, J.A. Fang, Studying on the stability of fractional order nonlinear system. Nonlinear Dyn. 70(1), 475–479 (2012)
X.D. Zhao, State-dependent switching control of switched positive fractional order systems. ISAT 62, 103–108 (2016)
J.F. Zhang, X.D. Zhao, Y. Chen, Finite-time stability and stabilization of fractional order positive switched systems. Circuits Syst. Signal Process. 35(7), 2450–2470 (2017)
X. Zhao, L.X. Zhang, P. Shi, M. Liu, Stability and stabilization of switched linear systems with mode-dependent average dwell time. IEEE Trans. Autom. Control 57(7), 1809–1815 (2012)
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grant 61403241 and the Fundamental Research Funds for the Central Universities under Grant GK201703009.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liang, J., Wu, B., Wang, YE. et al. Input–Output Finite-Time Stability of Fractional-Order Positive Switched Systems. Circuits Syst Signal Process 38, 1619–1638 (2019). https://doi.org/10.1007/s00034-018-0942-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-018-0942-1