
Abstract
This paper is concerned with the problem of state feedback \(H_\infty \) stabilization of discrete two-dimensional switched delay systems with actuator saturation represented by the second Fornasini and Marchesini state-space model. Firstly, the saturation behavior is described with the help of the convex hull representation, and a sufficient condition for asymptotical stability of the closed-loop system is proposed in terms of linear matrix inequalities via the multiple Lyapunov functional approach. Then, a state feedback controller is designed to guarantee the \(H_\infty \) disturbance attenuation level of the corresponding closed-loop system. Finally, two examples are provided to validate the proposed results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Two-dimensional (2-D) systems are gaining momentum due to their extensive applications such as in signal processing, linear image processing, multi-dimensional digital filtering, electricity transmission, energy exchange processes and process control [15, 32, 36]. 2-D systems are different in a sense from one-dimensional (1-D) systems, since information is propagated along two independent directions. 2-D systems can be represented by different models such as the Rosser model, Fornasini and Marchesini (FM) model and Attasi model [1, 20, 39]. Several significant results on the issues of stability analysis and controller synthesis of 2-D systems are available in the literature (see for instance [4, 9, 25, 33, 34, 37, 41, 47] and the references therein). Moreover, researchers in [13, 22, 23] presented useful results on stability and controller design of linear repetitive process.
In practical control systems, time delay is inevitable. For instance, time delay exists if there is transmission of information between different parts of the system. Time delay may greatly influence the stability of a system and sometimes may give rise to periodic oscillations in the system. Stability and stabilization of 1-D delayed systems were well addressed in [38, 40, 46]. The problems of stability analysis and controller design of 2-D systems with time delay have been investigated in [6, 19, 44, 48]. The \(H_\infty \) control problem of 2-D systems with and without delays was studied in [24, 45].
On the other hand, the actuator may be subject to saturation due to the existence of physical, technological or even safety constraints [8]. Actuator saturation may degrade the system performance and even lead to instability. The issues of stability and stabilization of 2-D systems with state or actuator saturation have been addressed in [7, 10, 14, 30, 35].
In past few decades, control community has paid considerable attention to switched control systems, because such systems are not only academically challenging but also practically important [31]. A switched system belongs to a special class of hybrid systems which consist of several subsystems described by differential/difference equations, along with a switching law specifying the switching between subsystems. Recently, the stability of 2-D switched systems via common Lyapunov function and multiple Lyapunov function approaches has been studied by Benzaouia et al. [2, 3]. The stability and stabilization of 2-D switched systems were investigated by utilizing the average dwell time approach [27–29, 42]. State feedback and output feedback \(H_\infty \) stabilization problems of 2-D switched delay-free systems were investigated in [16, 17]. Moreover, the dynamic output feedback \(H_\infty \) stabilization problem for 2-D switched systems with constant delay was investigated in [18]. However, to the best of our knowledge, the issue of control for 2-D switched systems with time-varying delay and actuator saturation has not been fully investigated, which motivates our current study.
In this paper, the \(H_\infty \) control problem of 2-D discrete switched systems with time-varying delay and actuator saturation represented by the second FM model is studied. Main contributions of this paper can be summarized as follows: (1) A new delay-dependent stability condition of 2-D switched delayed systems is derived by utilizing the multiple Lyapunov functional approach; and (2) \(H_\infty \) disturbance attenuation performance of the 2-D switched delay systems in the presence of actuator saturation is developed and the corresponding controller gains are obtained.
The remainder of this paper is organized as follows. In Sect. 2, problem formulation and some necessary lemmas are given. In Sect. 3, main results are presented. In Sect. 4, two examples are given to show the effectiveness of the proposed results. In Sect. 5, concluding remarks are given.
Notations: Throughout this paper, the superscript “\(T\)” denotes the transpose, and \(\left\| \cdot \right\| \) denotes the Euclidean norm. \(I\) represents the identity matrix with appropriate dimension. The set of all nonnegative integers is represented by \(Z_{+}.\, \mathrm{sat}\left( \cdot \right) \) denotes the saturation function, and \(\mathrm{diag}\left\{ {a_i } \right\} \) denotes a diagonal matrix with the diagonal elements \(a_i ,\,i=1,2,...,n.\, X^{-1}\) denotes the inverse of \(X\). The asterisk \({*}\) in a matrix is used to denote the term that is induced by symmetry. The \(l_2\)-norm of a 2-D signal \(w(i,j)\in R^{n},\, i,j\in Z_+ \), is given by
We say \(w(i,j)\) belongs to \(l_2 \left\{ {\left[ {0,\infty } \right) ,\left[ {0,\infty } \right) } \right\} \) if \(\left\| w \right\| _2 <\infty \).
2 Problem Formulation and Preliminaries
Consider the following discrete 2-D switched delay system with actuator saturation in the second FM model:
where \(x\left( {i,j} \right) \in R^{n}\) is a state vector, \(w\left( {i,j} \right) \in R^{q}\) is the noise input which belongs to \(l_2 \left\{ {\left[ {0,\infty } \right) ,\left[ {0,\infty } \right) } \right\} ,\, u(i,j)\in R^{m}\) is the control input, and \(z(i,j)\in R^{g}\) is the controlled output. \(i\) and \(j\) are integers in \(Z_+ .\, \sigma (i,j):Z_+ \times Z_+ \rightarrow \underline{N}=\left\{ {1,2,...,N} \right\} \) is the switching signal with \(N\) being the number of subsystems. \(A_1^k ,\,A_2^k ,\, A_{d1}^k ,\, A_{d2}^k ,\, B_1^k ,\, B_2^k ,\, E_1^k , \,E_2^k , \,G^{k}, \,L^{k}\) and \(F^{k}\), \(k\in \underline{N}\), are constant matrices with appropriate dimensions. \(d_1 (i)\) and \(d_2 (j)\) are delays along the horizontal and vertical directions, respectively, and satisfy
where \(\underline{d}{_1} ,\, \bar{{d}}_1 ,\, \underline{d}{_2}\) and \(\bar{{d}}_2\) represent the lower and upper bounds on the horizontal and vertical directions, respectively.
Remark 1
When there is only one subsystem, i.e., \(N=1\), system (1) reduces to the following 2-D system
Therefore, the addressed system (1) can be viewed as an extension of 2-D systems to switched systems.
For system (1), we consider a finite set of initial conditions, that is, there exist positive integers \(z_1 <\infty \) and \(z_2 <\infty \) such that
where \(h_{ij}\) and \(v_{ij}\) are given vectors.
The saturation function \(\mathrm{sat}\left( \cdot \right) :R^{m}\rightarrow R^{m}\) is defined as
where \(u=\left[ {u{_1}} \, {u{_2}} \,\cdots \,{u{_m}} \right] ^{T}\,\in R^{m}\), and \(\mathrm{sat}\left( {u{_s}} \right) =\mathrm{sign}\left( {u{_s}} \right) \min \left\{ {1,\left| {u{_s}} \right| } \right\} ,\, s=1,2,\ldots ,m\).
Implementing the control law \(u\left( {i,j} \right) =K^{\sigma (i,j)}x\left( {i,j} \right) \) to system (1) leads to the following closed-loop system:
Let \(\Xi \) be the set of all diagonal matrices in \(R^{m\times m}\) with diagonal elements that are either \(1\) or \(0\). For example, if \(m=2\), then
There are \(2^{m}\) elements \(D{_p}\) in \(\Xi \), and for every \(p=1,\ldots ,2^{m},\,D_{p}^{-}=I_{m}-D_{p}\) is also an element in \(\Xi \).
For a positive definite matrix \(P\in R^{n\times n}\) and a scalar \(\delta >0\), an ellipsoid \(\Omega \left( {P,\delta }\right) \) is defined as:
For a matrix \(H\in R^{m\times n}\), the polyhedral set \(L\left( H\right) \) is defined as:
where \(H{_s}\) is the \(s\)th row of the matrix \(H\).
Remark 2
In this paper, the switch among different modes can be assumed to occur at each of the sampling points of \(i\) or \(j\). It should be observed that the value of \(\sigma (i,j)\) only depends upon \(i+j\) (see the Refs. [3, 42]).
Definition 1
[1] System (5) with \(w(i,j)=0\) is asymptotically stable under switching signal \(\sigma (i,j)\), if \(\mathop {\lim }\limits _{i+j\rightarrow \infty } x(i,j)=0\).
Definition 2
System (5) is said to have a prescribed \(H_\infty \) disturbance attenuation level \(\gamma \) under switching signal \(\sigma (i,j)\), if it satisfies the following conditions:
-
(1)
When \(w(i,j)=0\), system (5) is asymptotically stable;
-
(2)
Under zero boundary condition, it holds that
where \(\left\| {\bar{{z}}} \right\| _2^2 =\left\| {z(i,j+1)} \right\| _2^2 +\left\| {z(i+1,j)} \right\| _2^2 \) and \(\left\| {\bar{{w}}} \right\| _2^2 =\left\| {w(i,j+1)} \right\| _2^2 +\left\| {w(i+1,j)} \right\| _2^2\).
Lemma 1
[5] For a given matrix \(S=\left[ \begin{array}{ll} {S_{11} }&{} {S_{12}} \\ {S_{12}^T }&{} {S_{22}} \\ \end{array}\right] \), where \(S_{11}\) and \(S_{22}\) are square matrices, the following conditions are equivalent:
-
(1)
\(S<0;\)
-
(2)
\(S_{11} <0,\, S_{22} -S_{12}^T S_{11}^{-1} S_{12} <0;\)
-
(3)
\(S_{22} <0,\, S_{11} -S_{12} S_{22}^{-1} S_{12}^T <0.\)
Lemma 2
[26] Given \(K\in R^{m\times n}\) and \(H\in R^{m\times n}\), then
for all \(x\left( {i,j} \right) \in R^{n}\) satisfying \(\left| {H_s x\left( {i,j} \right) } \right| \le 1\) for \(s=1,2,\ldots ,m\), where \(H_s \) is the \(s\)th row of the matrix \(H\) and \(co\{\cdot \}\) is the convex hull.
When \(x(i,j)\in L\left( {H^{\sigma (i,j)}} \right) \), it follows from Lemma 2 that
then substituting (8) into system (5) and noticing the relationship between convex combination and its vertex, we can obtain the following representation for \(p=1,2,\ldots ,2^{m}\)
where
3 Main Results
In this section, we focus upon the controller design of 2-D discrete switched system (1) to ensure the asymptotical stability and \(H_\infty \) performance of the closed-loop system (5).
3.1 Stability Analysis
In this subsection, a sufficient condition for asymptotical stability of system (5) is obtained via the multiple Lyapunov functional approach.
Theorem 1
Consider system (5) with \(w(i,j)=0\), if there exist symmetric positive definite matrices \(P_{h}^{k},\, P_{v}^{k},\, Q{_h} ,\, Q{_v} ,\, W_h ,\, W{_v} ,\, R{_h} ,\, R{_v} ,\, X=\left[ \begin{array}{ll} X_{11}&{} X_{12} \\ *&{} X_{22} \\ \end{array} \right] ,\, Y=\left[ \begin{array}{ll} Y_{11}&{}Y_{12} \\ *&{} Y_{22} \\ \end{array} \right] \) and any matrices \(N_1 =\left[ \begin{array}{l} N_{11} \\ N_{12} \\ \end{array} \right] , \, N_2 =\left[ \begin{array}{l} N_{21} \\ N_{22} \\ \end{array} \right] ,\, S_1 =\left[ \begin{array}{l} S_{11} \\ S_{12} \\ \end{array} \right] ,\, S_2 =\left[ \begin{array}{l} S_{21} \\ S_{22} \\ \end{array} \right] \) and \(H^{k}\) with appropriate dimensions, \(k\in \underline{N}\), such that
where
then the system is asymptotically stable for all switching sequence \(\sigma (i,j)\) and initial states satisfying \(\hbox {T}(\phi _h,\phi _v )\le 1\), where
and
Proof
When \(x(i,j)\in \mathop \cap \limits _{k=1}^N \Omega (P_h^k +P_v^k ,\;1)\), it can be obtained from (12) that \(x(i,j)\in L\left( {H^{k}} \right) \), \(\forall k\in \underline{N}\), then by Lemma 2, we get (8).
At first, we consider the following Lyapunov candidate functional
with
Without lose of generality, it is assumed that the \(k\)th and the \(l\)th subsystems are activated at points \((i+1, j+1)\) and \((i, j+1)\), respectively. The increment \(\Delta V(i+1,j+1)\) along the trajectory of system (5) with \(w(i,j)=0\) satisfies,\(\forall x(i,j)\in \mathop \cap \limits _{k=1}^N \Omega (P_h^k +P_v^k ,\;1)\),
where
The following equations hold for any matrices \(N_1^ =\left[ \begin{array}{l} N_{11} \\ N_{12} \\ \end{array} \right] ,\, N_2 =\left[ \begin{array}{l} N_{21} \\ N_{22} \\ \end{array} \right] ,\, S_1 =\left[ \begin{array}{l} S_{11} \\ S_{12} \\ \end{array} \right] \) and \(S_2 =\left[ \begin{array}{l} S_{21} \\ S_{22} \\ \end{array} \right] \) with appropriate dimensions:
where
On the other hand, for any matrices \(X=\left[ \begin{array}{ll} X_{11} &{} X_{12} \\ *&{} X_{22} \\ \end{array} \right] >0\) and \(Y=\left[ {{\begin{array}{ll} Y_{11} &{} Y_{12} \\ *&{} Y_{22} \\ \end{array}}} \right] \!>\!0\), the following equations hold:
Adding the terms on the right-hand sides of Eqs. (16–21) to (15) allows us to write (15) as
where \(\Psi _p =\Psi +\Theta ^{T}(P_h^k +P_v^k )\Theta +\left[ \begin{array}{ll} \Sigma {_1}{^T}&{}\Sigma {_2}{^T} \\ \end{array} \right] \left[ \begin{array}{ll} {\bar{d{_1}}} R{_h}&{} 0 \\ 0&{} {\bar{d{_2}}} R{_v} \\ \end{array} \right] \left[ \begin{array}{ll} \Sigma {_1}&{} \Sigma {_2} \\ \end{array} \right] ,\)
Applying Lemma 1, it follows from LMI (10) that \(\Psi _p <0\), and from (11), we have
For any \(r>z=\max (z_1 ,z_2 )\), it follows from (3) that \(V^{h}(0,r)=V^{v}(r,0)=0\), then summing up terms on both sides of (22) from \(r-1\) to \(0\) with respect to \(j\) and \(0\) to \(r-1\) with respect to \(i\), one gets
It can be obtained from (23) that
Similarly, we can get, \(\forall i+j=r\in Z_+ \),
If \(\hbox {T}(\phi {_h} ,\phi {_v})\le 1\), then \(x(i,j)^{T}(P{_h}{^k} +P{_v}{^k})x(i,j)\le 1\) is satisfied for all \(k\in \underline{N}\). Therefore, all the trajectories of \(x(i,j)\) starting from \(\hbox {T}(\phi _h ,\phi _v )\le 1\) will remain within \(\mathop \cap \nolimits _{k=1}^N \Omega (P_h^k +P_v^k ,\,1)\). Moreover, system (5) with \(w(i,j)=0\) is asymptotically stable for any switching sequences and initial conditions satisfying \(\hbox {T}(\phi _h ,\phi _v )\le 1\).
This completes the proof. \(\square \)
3.2 \(H_\infty \) Performance Analysis
In this subsection, \(H_\infty \) performance analysis of system (5) with \(w\left( {i,j} \right) \) satisfying \(\left\| {\bar{{w}}} \right\| _2 \le \alpha \) is developed.
Theorem 2
Let \(\alpha \) and \(\gamma \) be given scalars. If there exist symmetric positive definite matrices \(P_h^k , \,P{_v}{^k} , \,Q_h ,\, Q_v,\,W_h,\, W_v ,\, R_h ,\,R_v ,\, X=\left[ \begin{array}{ll} X_{11} &{} X_{12} \\ *&{} X_{22} \\ \end{array} \right] >0,\, Y=\left[ \begin{array}{ll} Y_{11} &{} Y_{12} \\ *&{} Y_{22} \\ \end{array} \right] >0\), and any matrices \(N_1 =\left[ \begin{array}{l} N_{11} \\ N_{12} \\ \end{array} \right] , \, N_2 =\left[ \begin{array}{l} N_{21} \\ N_{22} \\ \end{array} \right] ,\, S_1 =\left[ \begin{array}{l} S_{11} \\ S_{12} \\ \end{array} \right] ,\, S_2 =\left[ \begin{array}{l} S_{21} \\ S_{22} \\ \end{array} \right] \) and \(H^{k}\) with appropriate dimensions, \(k\in \underline{N}\), such that
where
then system (5) has a prescribed \(H_\infty \) disturbance attenuation level \(\gamma \) for all switching sequence \(\sigma (i,j)\) and initial states satisfying \(\hbox {T}(\phi _h ,\phi _v )\le 1\), where \(\hbox {T}(\phi _h ,\phi _v)\) is given by (13).
Proof
When \(x(i,j)\in \mathop \cap \limits _{k=1}^N \Omega (P_h^k +P_v^k ,\;1+\gamma ^{2}\alpha ^{2})\), it can be obtained from (26) that \(x(i,j)\in L\left( {H^{k}} \right) ,\, \forall k\in \underline{N}\), then by Lemma 2, we get (8). Since (10–12) can be deduced from (24–26), by Theorem 1, we can obtain from (24–26) that system (5) with \(w(i,j)=0\) is asymptotically stable for any switching sequences and initial conditions satisfying \(\hbox {T}(\phi _h ,\phi _v )\le 1\).
To establish the \(H_\infty \) performance of system (5), we consider
where \(\bar{z}(i,j)=\left[ \begin{array}{ll} {z(i,j+1)^{T}}&{z(i+1,j)^{T}}\end{array} \right] ^{T}\) and \(\bar{w}(i,j)=\big [\begin{array}{ll} {w(i,j+1)^{T}}&{w(i+1,j)^{T}}\end{array} \big ]^{T}\).
Following the procedure of the proof of Theorem 1, \(\forall x(i,j)\in \mathop \cap \nolimits _{k=1}^N \Omega (P_h^k +P_v^k ,\;1 +\gamma ^{2}\alpha ^{2})\), we can obtain
where
By Lemma 1, LMI (24) is equivalent to \(\bar{{\Psi }}_p <0\), and from (25), we have
that is
For any \(\left\| {\bar{{w}}} \right\| _2 \le \alpha \), we obtain from (30) that
It follows from \(\hbox {T}(\phi _h , \phi _v )\le 1\) and (31) that \(x(i,j)^{T}(P_h^k +P_v^k )x(i,j)\le 1+\gamma ^{2}\alpha ^{2}\), \(\forall k\in \underline{N}\). Thus, all the trajectories of system (5) starting from \(\hbox {T}(\phi _h , \phi _v )\le 1\) will remain within \(\mathop \cap \limits _{k=1}^N \Omega (P_h^k +P_v^k ,1+\gamma ^{2}\alpha ^{2})\).
On the other hand, we can obtain form (31) that
Under zero boundary conditions, it can be obtained from (32) that
which implies
This completes the proof. \(\square \)
3.3 \(H_\infty \) Controller Design
In this subsection, a sufficient condition for finding the controller gains is obtained in terms of LMIs.
Theorem 3
Consider system (1), for given scalars \(\alpha \) and \(\gamma \), and matrices \(J>0,\, U>0\) and \(Z>0\); if there exist symmetric positive definite matrices \(P_h^k,\, P_v^k ,\, Q_h ,\, Q_v ,\, W_h ,\, W_v ,\, R_h ,\, R_v ,\, X=\left[ \begin{array}{ll} X_{11}&{} X_{12} \\ *&{} X_{22} \\ \end{array} \right] ,\, Y=\left[ \begin{array}{ll} Y_{11} &{} Y_{12} \\ *&{} Y_{22} \\ \end{array}\right] \) and any matrices \(K^{k},\, H^{k},\, N_1 =\left[ \begin{array}{l} N_{11} \\ N_{12} \\ \end{array} \right] ,\, N_2 =\left[ \begin{array}{l} N_{21} \\ N_{22} \\ \end{array} \right] ,\, S_1 =\left[ \begin{array}{l} S_{11} \\ S_{12} \\ \end{array} \right] \) and \(S_2 =\left[ \begin{array}{l} S_{21} \\ S_{22} \\ \end{array} \right] \) with appropriate dimensions, \(k\in \underline{N}\), such that (25) and the following LMIs hold:
where
then the closed-loop system (5) has a prescribed \(H_\infty \) disturbance attenuation level \(\gamma \) for all switching sequence \(\sigma (i,j)\) and initial states satisfying \(\hbox {T}(\phi _h ,\phi _v )\le 1\), where \(\hbox {T}(\phi _h ,\phi _v)\) is given by (13).
Proof
By Lemma 1, (35) is equivalent to (26). Pre- and post-multiplying (24) by \(\mathrm{diag}\left\{ {I,I,I,I,I,I,I,I,(P_h^k +P_v^k )^{-1},(R_h )^{-1},(R_v )^{-1}} \right\} \) and applying Lemma 1, we obtain
where \(\bar{{\psi }}_3 =(P_h^k +P_v^k )^{-1},\, \bar{{\psi }}_4 =(R_h )^{-1}\) and \(\bar{{\psi }}_5 =(R_v )^{-1}\).
For any matrices \(J>0,\, U>0\) and \(Z>0\), we have
Then (36) holds if (34) is satisfied.
This completes the proof. \(\square \)
Remark 3
Some previous results on \(H_\infty \) controller design of 2-D switched systems can be seen in [16–18]; however, time-varying delay and actuator saturation, which add difficulties in designing the controller, were not taken into account in these papers. In the present paper, a new Lyapunov functional, which can lead to less conservative results, is proposed to deal with the time-varying delay, and the convex hull technique is utilized to handle the actuator saturation.
Remark 4
It should be noted that the conditions (25), (34) and (35) are in the form of LMIs, which can be conveniently solved via LMI toolbox or Sedumi and Yalmip in MATLAB [5, 21]. From Theorem 3, we can see that the controller gain matrices \(K^{k}(k\in \underline{N})\) can be directly obtained by solving LMIs (25), (34) and (35).
We present the procedure for construction of the desired controller as follows:
-
Step 1. Input the matrices \(A_1^k,\, A_2^k ,\, A_{d1}^k ,\, A_{d2}^k ,\,B_1^k ,\, B_2^k ,\, E_1^k ,\, E_2^k ,\, G^{k},\, L^{k}\) and \(F^{k},\, \forall k\in \underline{N}\).
-
Step 2. Choose the appropriate parameters \(\underline{d}_1 ,\, \bar{{d}}_1 ,\, \underline{d}_2 ,\, \bar{{d}}_2 ,\, \alpha ,\, \gamma \) and matrices \(J>0,\, U>0,\, Z>0\).
-
Step 3. By solving LMIs (25, 34–35), one can obtain \(P_h^k ,\, P_v^k ,\, H^{k},\, Q_h ,\, Q_v , W_h ,\, W_v ,\, R_h,\) \(R_v ,\, X,\, Y,\, N_1\), \(N_2 ,\, S_1 ,\, S_2 \) and controller gain matrices \(K^{k} \,(k\in \underline{N})\) directly.
4 Simulation Examples
In this section, we present two examples to illustrate the effectiveness of the proposed approach.
Example 1
Consider system (1) with parameters as follows:
Subsystem 1:
Subsystem 2:
In this example, it can be obtained that \(\underline{d}_1 =1,\, \bar{{d}}_1 =2,\, \underline{d}_2 =1\) and \(\bar{{d}}_2 =2\). Take \(\alpha =0.1,\, \gamma =1,\, J=\mathrm{diag}\{3,3\},\,U=\mathrm{diag}\{22,15\}\) and \(Z=\mathrm{diag}\{30,17\}\). Then solving LMIs in Theorem 3 via LMI toolbox gives rise to
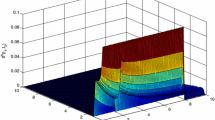
Figures 1 and 2 depict the trajectories of the two states \(x_1 (i,j)\) and \(x_2 (i,j)\), respectively. The corresponding switching signal is represented by Fig. 3, where the initial states are
and the disturbance is \(w\left( {i,j} \right) =0.1\exp \left( {-0.25\pi \left( {i+j} \right) } \right) \).

State trajectory of \(x_1 (i,j)\)

State trajectory of \(x_2 (i,j)\)

Switching signal
Form Figs. 1, 2 and 3, it can be observed that the closed-loop system is asymptotically stable.
Example 2
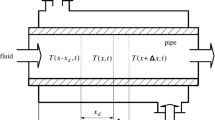
Let us consider the thermal processes in chemical reactors, heat exchangers and pipe furnaces, which can be expressed by the following partial differential equation (PDE) [43]:
where \(T\)(\({x,t}\)) is the temperature at \(x\left( {\hbox {space}} \right) \in [0,x_f ]\) and \(t\left( {\hbox {time}} \right) \in [0,\infty ),\, a_0^{\sigma \left( {x,t} \right) } \), \(a_1^{\sigma \left( {x,t} \right) } \) and \(e^{\sigma \left( {x,t} \right) }\) are real coefficients with \(\sigma \left( {x,t} \right) \) being the switching signal, and \(u(x,t)\) is the input function.
Digitally based control law design and implementation require the construction of an appropriate approximation of the dynamics by difference equations. If a direct discretization method is applied to spatiotemporal dynamics, there is the need to ensure numerical stability by selection of the sampling period(s) [11, 12]. In this paper, we will use the Crank–Nicholson discretization method to guarantee the unconditional numerical stability.
Introduce the following approximations
where \(T\left( {i,j} \right) =T\left( {i\Delta x,j\Delta t} \right) ,\, u\left( {i,j} \right) =u\left( {i\Delta x,j\Delta t} \right) ,\, \Delta t\) and \(\Delta x\) are time and space discretization periods, respectively.
The discrete approximation to the dynamics of (37) can be written in the form of (1) with
Since the limits \(\mathop {\lim }\limits _{\Delta t\rightarrow 0} \frac{T(i,j+1)-T(i,j)}{\Delta t}\) and \(\mathop {\lim }\limits _{\Delta x\rightarrow 0} \frac{T(i,j)-T(i-1,j)}{\Delta x}\) are first-order derivative when \(\Delta t\) and \(\Delta x\) are infinitely small, the discretizations of \(\frac{\partial T(x,t)}{\partial t}\) and \(\frac{\partial T(x,t)}{\partial x}\) are consistent. Moreover, the discretization of the above PDE will converge to the true solution if the resulting difference equation is stable [11, 12].
Now we assume that the 2-D switched system has two subsystems with \(a_0^1 =2,\,a_0^2 =3,\, a_1^1 =0.2,\, a_1^2 =0.3,\, e^{1}=1,\, d(t)=1+\sin \left( {\frac{\pi t}{2}} \right) ,\, e^{2}=1.5\). The time and space discretization periods are chosen as \(\Delta x=0.3\) and \(\Delta t=0.2\). By considering the \(H_\infty \) disturbance attenuation, the thermal process is modeled in the form of (1) with parameters as follows:
Subsystem 1:
Subsystem 2:
Take \(\alpha =0.1,\, \gamma =1,\,J=\mathrm{diag}\{3,3\},\, U=\mathrm{diag}\{22,15\}\) and \(Z=\mathrm{diag}\{30,17\}\), then solving LMIs in Theorem 3 leads to
Choosing the initial states
and the disturbance \(w\left( {i,j} \right) =0.1\exp \left( {-0.25\pi \left( {i+j} \right) } \right) \), state trajectories of \(x_1 (i,j)\) and \(x_2 (i,j)\) are shown in Figs. 4 and 5, respectively, and Fig. 6 shows the switching signal. It can be seen from Figs. 4, 5 and 6 that the resulting difference equation is asymptotically stable, which implies that the true solution of the above PDE asymptotically converges to zero. This demonstrates the effectiveness of the proposed method.

State trajectory of \(x_1 (i,j)\)

State trajectory of \(x_2 (i,j)\)

Switching signal
5 Conclusions
This paper has investigated the state feedback \(H_\infty \) stabilization problem of 2-D discrete switched systems with actuator saturation. A new sufficient condition for asymptotical stability of the closed-loop system has been obtained. A state feedback \(H_\infty \) controller has been proposed such that the closed-loop system is asymptotically stable and achieves a prescribed disturbance attenuation level \(\gamma \). Two examples have been provided to show the effectiveness of the proposed approach.
References
S. Attasi, Systemes lineaires homogenes a deux indices (IRIA, Rapport, Laboria, 1973)
A. Benzaouia, A. Hmamed, F. Tadeo, Stability conditions for discrete 2-D switching systems, based on a multiple Lyapunov function. In European control conference 23–26 (2009)
A. Benzaouia, A. Hmamed, F. Tadeo, A.E. Hajjaji, Stabilisation of discrete 2-D time switching systems by state feedback control. Int. J. Syst. Sci. 42(3), 479–487 (2011)
M. Bisiacco, New results in 2-D optimal control theory. Multidimens. Syst. Signal Process. 6(3), 189–222 (1995)
S.P. Boyd, L. El Ghaoui, E. Feron, V. Balakrishnan, Linear Matrix Inequalities in System and Control Theory (SIAM, Philadelphia, 1994)
S.F. Chen, Delay-dependent stability for 2-D systems with time-varying delay subject to state saturation in the Roesser model. Appl. Math. Comput. 216(9), 2613–2622 (2010)
S.F. Chen, Stability analysis for 2-D systems with interval time-varying delays and saturation nonlinearities. Signal Process 90(7), 2265–2275 (2010)
Y. Chen, S. Fei, K. Zhang, L. Yu, Control of switched linear systems with actuator saturation and its applications. Math. Comput. Model. 56(1), 14–26 (2012)
X. Chen, J. Lam, H. Gao, S. Zhou, Stability analysis and control design for 2-D fuzzy systems via basis-dependent Lyapunov functions. Multidimens. Syst. Signal Process 24(3), 395–415 (2013)
D. Chen, H. Yu, Stability analysis of state saturation 2D discrete time-delay systems based on F-M model. Math. Probl. Eng. 2013, 9 (2013). Article ID 749782
B. Cichy, K. Gałkowski, P. Dąbkowski, H. Aschemann, A. Rauh, A new procedure for the design of iterative learning controllers using a 2D systems formulation of processes with uncertain spatio-temporal dynamics. Control Cybern 42(1), 9–26 (2013)
B. Cichy, K. Gałkowski, E. Rogers, Iterative learning control for spatio-temporal dynamics using Crank-Nicholson discretization. Multidimens. Syst. Signal Process 23(1–2), 185–208 (2012)
P. Dabkowski, K. Galkowski, O. Bachelier, E. Rogers, A. Kummert, J. Lam, Strong practical stability and stabilization of uncertain discrete linear repetitive processes. Numer. Linear Algebra Appl. 20(2), 220–233 (2013)
A. Dey, H. Kar, An LMI based criterion for the global asymptotic stability of 2-D discrete state-delayed systems with saturation nonlinearities. Digit. Signal Process. 22(4), 633–639 (2012)
C. Du, L. Xie, \(H_\infty \) Control and Filtering of Two-dimensional Systems (Springer, Berlin, 2002)
Z. Duan, Z. Xiang, State feedback \(H_\infty \) control for discrete 2-D switched systems. J. Franklin Inst. 350(6), 1513–1530 (2013)
Z. Duan, Z. Xiang, Output feedback \(H_\infty \) stabilization of 2-D discrete switched systems in FM LSS model. Circuits Syst. Signal Process 33(4), 1095–1117 (2014)
Z. Duan, Z. Xiang, H.R. Karimi, Delay-dependent \(H_\infty \) control for 2-D switched delay systems in the second FM model. J. Franklin Inst. 350(7), 1697–1718 (2013)
Z.Y. Feng, L. Xu, M. Wu, Y. He, Delay-dependent robust stability and stabilisation of uncertain two-dimensional discrete systems with time-varying delays. IET Control Theory Appl. 4(10), 1959–1971 (2010)
E. Fornasini, G. Marchesini, Doubly indexed dynamical systems: state space models and structural properties. Math. Syst. Theory 12(1), 59–72 (1978)
P. Gahinet, A. Nemirovskii, A.J. Laub, M. Chilali, The LMI control toolbox. In IEEE conference on decision and control, pp. 2038–2038 (1994)
K. Galkowski, J. Lam, E. Rogers, S. Xu, B. Sulikowski, W. Paszke, D.H. Owens, LMI based stability analysis and robust controller design for discrete linear repetitive processes. Int. J. Robust Nonlinear Control 13(13), 1195–1211 (2003)
K. Galkowski, E. Rogers, S. Xu, J. Lam, D.H. Owens, LMIs-a fundamental tool in analysis and controller design for discrete linear repetitive processes. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 49(6), 768–778 (2002)
C.Y. Gao, G.R. Duan, X.Y. Meng, Robust \(H_\infty \) filter design for 2-D discrete systems in Roesser model. Int. J. Innov. Comput. Inf. Control 5(4), 413–418 (2008)
I. Ghous, Z. Xiang, Robust state feedback \(H_\infty \) control for uncertain 2-D continuous state delayed systems in the Roesser model. Multidim. Syst. Signal Process (2014). doi:10.1007/s11045-014-0301-8
T. Hu, Z. Lin, Control Systems with Actuator Saturation: Analysis and Design (Springer, Boston, 2001)
S. Huang, Z. Xiang, Delay-dependent stability for discrete 2-D switched systems with state delays in the Roesser model. Circuits Syst. Signal Process 32(6), 2821–2837 (2013)
S. Huang, Z. Xiang, Robust reliable control of uncertain 2-D discrete switched systems with state delays. Trans. Inst. Meas. Control 36(1), 119–130 (2014)
S. Huang, Z. Xiang, H.R. Karimi, Stabilization and controller design of 2-D discrete switched systems with state delays under asynchronous switching. Abstr. Appl. Anal. 2013, 12 (2013). Article ID 961870
S. Huang, Z. Xiang, H. Reza Karimi, Robust \(l_2 \)-gain control for 2-D nonlinear stochastic systems with time-varying delays and actuator saturation. J. Franklin Inst. 350(7), 1865–1885 (2013)
C.A. Ibanez, M.S. Suarez-Castanon, O.O. Gutierrez-Frias, A switching controller for the stabilization of the damping inverted pendulum cart system. Int. J. Innov. Comput. Inf. Control 9(9), 3585–3597 (2013)
T. Kaczorek, Two-Dimensional Linear Systems (Springer, Berlin, 1985)
T. Kaczorek, New stability tests of positive standard and fractional linear systems. Circuits Syst. 2(04), 261 (2011)
J. Kurek, Stability of nonlinear time-varying digital 2-D Fornasini-Marchesini system. Multidimens. Syst. Signal Process 25(1), 235–244 (2014)
J. Liang, Z. Wang, X. Liu, Robust state estimation for two-dimensional stochastic time-delay systems with missing measurements and sensor saturation. Multidimens. Syst. Signal Process 25(1), 157–177 (2014)
W.S. Lu, Two-Dimensional Digital Filters (CRC Press, New York, 1992)
W.S. Lu, E.B. Lee, Stability analysis for two-dimensional systems via a Lyapunov approach. IEEE Trans. Circuits Syst. 32(1), 61–68 (1985)
C. Onat, A new concept on PI design for time delay systems: weighted geometrical center. Int. J. Innov. Comput. Inf. Control 9(4), 1539–1556 (2013)
R.P. Roesser, A discrete state-space model for linear image processing. IEEE Trans. Autom. Control 20(1), 1–10 (1975)
S. Saat, D. Huang, S.K. Nguang, Robust state feedback control of uncertain polynomial discrete-time systems: an integral action approach. Int. J. Innov. Comput. Inf. Control 9(3), 1233–1244 (2013)
V. Singh, Stability analysis of 2-D linear discrete systems based on the Fornasini-Marchesini second model: stability with asymmetric Lyapunov matrix. Digit. Signal Process 26, 183–186 (2014)
Z. Xiang, S. Huang, Stability analysis and stabilization of discrete-time 2-D switched systems. Circuits Syst. Signal Process 32(1), 401–414 (2013)
J. Xu, L. Yu, \(H_\infty \) control for 2-D discrete state delayed systems in the second FM model. Acta Autom. Sin. 34(7), 809–813 (2008)
J. Xu, L. Yu, Delay-dependent guaranteed cost control for uncertain 2-D discrete systems with state delay in the FM second model. J. Franklin Inst. 346(2), 159–174 (2009)
H. Xu, Y. Zou, J. Lu, S. Xu, Robust \(H_\infty \) control for a class of uncertain nonlinear two-dimensional systems with state delays. J. Franklin Inst. 342(7), 877–891 (2005)
R. Yang, P. Shi, G.P. Liu, H. Gao, Network-based feedback control for systems with mixed delays based on quantization and dropout compensation. Automatica 47(12), 2805–2809 (2011)
S. Ye, W. Wang, Stability analysis and stabilisation for a class of 2-D nonlinear discrete systems. Int. J. Syst. Sci. 42(5), 839–851 (2011)
S. Ye, Y. Zou, W. Wang, J. Yao, Delay-dependent stability analysis for two-dimensional discrete systems with shift delays by the general models. In 10th IEEE international conference on control, automation, Robotics and vision, pp. 973–978 (2008)
Acknowledgments
This work was supported by the National Natural Science Foundation of China under Grant No. 61273120, the Postgraduate Innovation Project of Jiangsu Province (Grant Nos. CXZZ13_0208, KYLX_0378), the Jiangsu Scientific and Technological Support Plan (Grant No. BE2012175), the Jiangsu Province “333Project” (Grant No. BRA2012163) and the Visiting Scholar Foundation of Key Lab in University under Grant No. GZKF-201203. The authors would like to thank the Editor-in-Chief, Dr. M.N.S. Swamy, for his helpful comments in improving the presentation of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ghous, I., Xiang, Z. & Karimi, H.R. State Feedback \(H_\infty \) Control For 2-D Switched Delay Systems with Actuator Saturation in the Second FM Model. Circuits Syst Signal Process 34, 2167–2192 (2015). https://doi.org/10.1007/s00034-014-9960-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-014-9960-9