
Abstract
We consider a fluid–structure interaction model for an incompressible fluid where the elastic response of the free boundary is given by a damped Kirchhoff plate model. Utilizing the Newton polygon approach, we first prove maximal regularity in \(L^p\)-Sobolev spaces for a linearized version. Based on this, we show existence and uniqueness of the strong solution of the nonlinear system for small data.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and main result
We consider the system
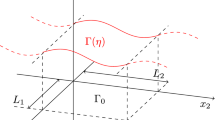
which represents a (one-phase) fluid–structure interaction model. The fluid with density \(\rho >0\) and viscosity \(\mu >0\) occupies at a time \(t \ge 0\) the region \(\Omega (t) \subseteq {{\mathbb {R}}}^n\) with boundary \(\Gamma (t)=\partial \Omega (t)\). Furthermore, we assume the fluid to be incompressible, and we assume the stress to be given as
The unknowns in the model are the velocity u, the pressure q, and the interface \(\Gamma \). We denote by \(\nu \) the exterior unit normal field at \(\Gamma \), by \(V_\Gamma \) the velocity of the boundary \(\Gamma \), and by \(e_j\) the j-th standard basis vector in \({{\mathbb {R}}}^n\), i.e., \(e_n=(0,\ldots ,0,1)\).
The function \(\phi _\Gamma \) describes the elastic response at \(\Gamma \) which is given by a damped Kirchhoff-type plate model. Throughout the paper, we assume that \(\Gamma \) is given as a graph of a function \(\eta :{{\mathbb {R}}}_+\times {{\mathbb {R}}}^{n-1}\rightarrow {{\mathbb {R}}}\), that is
and that \(\Gamma (t)\) is sufficiently flat. Thus, \(\Omega (t)\) is a perturbed upper half-plane. In these coordinates, the elastic response is given as
for \(\alpha ,\gamma >0\), \(\beta \in {{\mathbb {R}}}\), where \(\Delta '\) stands for the Laplacian in \({{\mathbb {R}}}^{n-1}\). Finally, the initial configuration and velocity of the interface resp. the initial fluid velocity are given by \(\Gamma _0\) and \(V_0\) resp. \(u_0= (u_0',u_0^n)\). Note that in addition to the initial position \(\Gamma _0\) of the boundary, also its initial velocity \(V_0\) has to be specified as the equation is of second order with respect to time on the boundary. We remark that in the formulation of the boundary conditions in lines 3 and 4 of (1.1), one has to take into account that the Kirchhoff plate model is formulated in a Lagrangian setting, whereas for the fluid an Eulerian setting is used. This is discussed in more detail in the beginning of Sect. 2.
The symbol of \(m(\partial _t,\partial ')\) is given as
which vanishes if
For \(\gamma >0\), the roots of \(m(\cdot ,\xi ')\) lie in some sector which is a subset of \(\{\lambda \in {{\mathbb {C}}}: {\mathrm {Re}}\lambda <0\}\). This indicates that the term \(-\gamma \partial _t\Delta '\eta \) in \(\phi _\Gamma \) parabolizes the problem. Physically, one also speaks of structural damping of the plate.
We notice that basically the same results as proved in this note can be expected by considering layer like domains or rectangular type domains with periodic lateral boundary conditions. For simplicity, however, we restrict the approach given here to the just introduced geometry.
Model (1.1) was introduced in [23] in connection to applications to cardiovascular systems. In the 2D case, this system was investigated in [3] in the \(L^2\)-setting. In fact, in [3, Proposition 3.12] it is proved that the linear operator associated with (1.1) generates an analytic \(C_0\)-semigroup in a suitable Hilbert space setting. This exhibits the parabolic character of the problem. Therefore, it is reasonable to consider an \(L^p\)-theory for the system (1.1) which is the main purpose of this note.
Alternative approaches to system (1.1) in the \(L^2\)-setting also for the hyperbolic–parabolic case, i.e., \(\gamma =0\), are given, e.g., in [6, 10, 16, 17, 21], concerning weak solutions and, e.g., in [4, 7, 18, 19] concerning (local) strong solutions. A more recent approach in a two-dimensional \(L^2\)-framework concerning global strong solutions is presented in [11]. Recently, in [20] the interaction between an incompressible fluid and a damped beam (which relates to the case of a one-dimensional boundary) was studied in the \(L^p\)-\(L^q\)-setting.
In the present paper, we develop an \(L^p\)-approach in general dimension for system (1.1). In order to formulate the main result, for \(k,\ell \in {{\mathbb {N}}}_0\) non-cylindrical spaces are defined as
where
The space \(L^p(J;{\dot{H}}^1_p(\Omega (t)))\) for the pressure is defined accordingly. We show the existence of strong solutions for small data and give a precise description of the maximal regularity spaces for the unknowns. More precisely, we prove the following main result for (1.1).
Theorem 1.1
Let \(n\ge 2\), \(p\ge (n+2)/3\), \(T>0\), and \(J=(0,T)\). Assume that
for some \(\kappa >0\), where \(\Gamma _0={\mathrm {graph}}(\eta _0)\) and \(V_0=\{(0,\eta _1(x'));\ x'\in {{\mathbb {R}}}^{n-1}\}\) in (1.1). Then, there exists a unique solution \((u,q,\Gamma )\) of system (1.1) such that \(\Gamma ={\mathrm {graph}}(\eta )\) and such that
provided that \(\kappa =\kappa (T)\) is small enough and that the following compatibility conditions are satisfied:
-
(1)
\( {\mathrm {div\,}}u_0 = 0\),
-
(2)
if \(p>\tfrac{3}{2}\), then \(u_0'|_{\Gamma _0} = 0\) and \(u_0^n|_{\Gamma _0} - \eta _1=0\) almost everywhere,
-
(3)
there exists an \(\eta _*\in {{\mathbb {E}}}_\eta \) with \(\eta _*|_{t=0} = \eta _0\), \(\partial _t\eta _*|_{t=0}=\eta _1\) and
$$\begin{aligned} \partial _t \eta _*\in H_{p}^1(J; H_{p,0}^{-1}({{\mathbb {R}}}^n_+)), \end{aligned}$$where
$$\begin{aligned} \partial _t \eta _*(\phi ) := - \int \limits _{{{\mathbb {R}}}^{n-1}} \partial _t \eta _*\phi dx',\quad \phi \in \dot{H}_{p'}^1({{\mathbb {R}}}^n_+). \end{aligned}$$
The solution depends continuously on the data.
Remark 1.2
(a) The compatibility conditions (1)–(3) are natural in the sense that they are also necessary for the existence of a strong solution. Condition (3) appears in a similar way for the two-phase Stokes problem, see, e.g., [22], Section 8.1. Note that the regularity for \(\eta ^*\) in (3) does not follow from \(\eta ^*\in {{\mathbb {E}}}_\eta \).
(b) We remark that the maximal regularity space \({{\mathbb {E}}}_\eta \) for \(\eta \) describing the boundary is not a standard space. It is given as an intersection of three Sobolev spaces. This is due to the fact that the symbol of the complete system has an inherent inhomogeneous structure, and therefore the Newton polygon method is the correct tool to show maximal regularity. For the details, see Sect. 3.
c) We note that in the physically relevant situations \(n=2\) and \(n=3\), the case \(p=2\) is included. This might be of importance when considering the singular limit \(\gamma \rightarrow 0\) for vanishing damping of the plate.
d) We formulated the result in the form of existence for fixed time and small data. By similar methods, one can also show short time existence for arbitrarily large data. This is more intricate, since then while estimating nonlinearities one has to carefully track the dependence of the constants on related smallness parameters. But we think that the known strategies, as elaborated, e.g., in [22], can be adapted.
The proof of Theorem 1.1 is based on several ingredients: First, we transform the system to a fixed domain and consider the linearization of the transformed system. By an application of the Newton polygon approach (see, e.g., [8] and [9]), we obtain maximal regularity for the linearized system. To deal with the nonlinearities, we employ embedding results on anisotropic Sobolev spaces given in [15].
Remark 1.3
a) The half-space model problem considered here can also be regarded as a first step towards an analysis on domains of more general geometry. By applying a suitable localization procedure, similar results are expected to hold, e.g., on bounded domains. On bounded domains, even global solvability for small data might be available.
b) An \(L^p\)-\(L^q\)-theory with \(p\ne q\) might be available as well. For the linear theory, in particular concerning the Newton polygon approach, the use of [9] then has to be replaced by the generalized approach developed in [8], see the proof of Lemma 3.2. Concerning the nonlinear system, so far there is no \(L^p\)-\(L^q\) analogon of the results on multiplication in [15] available in the existing literature. For this purpose, the corresponding estimates of the nonlinearities then had to be derived by more direct methods.
2 The transformed system
We start with a short discussion of the boundary conditions, where the Eulerian approach for the fluid has to be coupled with the Lagrangian description for the plate (see also [17] and [10]). Let \(\Gamma \) be given as in (1.2) and assume that \(\eta \) is sufficiently smooth. Following the Kirchhoff plate model, in-plate motions are ignored, and the velocity of the plate at the point \((x',\eta (t,x'))^\tau \) is parallel to the vertical direction and given by \((0,\partial _t \eta (t,x'))^\tau = \partial _t \eta (t,x') e_n\). As the fluid is assumed to adhere to the plate, we have no-slip boundary conditions for the fluid, and the equality of the velocities yields the first boundary condition
The exterior normal at the point \((x',\eta (t,x'))\) of the boundary \(\Gamma (t)\) is given by
We define the transform of variables
Obviously, we have \(\theta ^{-1}(t,x',y)=(t,x',y-\eta (t,x'))\). As it was discussed in [17], Section 1.2, the force F exerted by the fluid on the boundary is given by the evaluation of the stress tensor at the deformed boundary in the direction of the inner normal \(-\nu (t,x')\). More precisely, we obtain ( [17], Eq. (1.4))
As \(\sqrt{1+|\nabla ' \eta |^2} = - \nu (t,x')\cdot e_n\), the equality of the forces gives the second boundary condition
Conditions (2.1) and (2.2) are the precise formulation of the boundary conditions in (1.1).
To solve the problem (1.1), we first note that by a re-scaling argument we may assume that \(\rho =\mu =1\) for the density \(\rho \) and viscosity \(\mu \) from now on. Next, we transform the problem (1.1) to a problem on the fixed half-space \({{\mathbb {R}}}^n_+\), using the above transformation \(\theta \). To this end, we set \(J:=(0,T)\) and write \(x=(x',x_n)\in {{\mathbb {R}}}^n_+\) with \(x'\in {{\mathbb {R}}}^{n-1}\). With the corresponding meaning, we write \(v'\), \(\nabla '\), etc. The pull-back is then defined as
and correspondingly the push-forward as
We also set \(\Gamma _0=\Gamma (0)=\{(x',\eta _0(x'));\ x'\in {{\mathbb {R}}}^{n-1}\}\) and \(V_0=V_\Gamma (0)=(0,\eta _1(\cdot ))^\tau \).
Applying the transform of variables to (1.1) leads to the following quasilinear system for \((v,p,\eta )\):
The nonlinear right-hand sides are given as
3 The linearized system
The aim of this section is to derive maximal regularity for the linearized system
In the sequel for \(k\in {{\mathbb {N}}}_0\), \(1<p<\infty \), a domain \(\Omega \subset {{\mathbb {R}}}^n\), and a Banach space X,
denotes the standard X-valued Sobolev space. Here, \(L^p(\Omega ,X)\) denotes the standard Bochner–Lebesgue space. We also put \(W^k_p(\Omega ,X):=H^k_p(\Omega ,X)\) for \(k\in {{\mathbb {N}}}_0\). For \(s>0\), \(s\not \in {{\mathbb {N}}}\), Sobolev (or Bessel potential) and Sobolev–Slobodeckii spaces of fractional order are defined via complex and real interpolation, i.e., by
respectively, where \(k<s<k+1\). Also as usual, we set \(H^{s}_{p,0}(\Omega ,X):=\overline{C^\infty _c(\Omega ,X)}^{H^s_p(\Omega ,X)}\) and \(W^{s}_{p,0}(\Omega ,X):=\overline{C^\infty _c(\Omega ,X)}^{W^s_p(\Omega ,X)}\), where \(C^\infty _c\) stands for the space of smooth and compactly supported functions in \(\Omega \). In case \(X={{\mathbb {R}}}^n\), corresponding dual spaces are defined as
where \(1/p+1/p'=1\). Accordingly, the spaces \(W^{-k}_p(\Omega )\) and \(W^{-k}_{p,0}(\Omega )\) are defined. If \(\Omega =J=(0,T)\) is an interval, we also set
and \({_0W}^s_p(J,X)\) accordingly. Observe that then we have \({_0H}^1_p(J,X)=\{u\in H^1_p(J,X);\ u(0)=0\}\). As references for vector-valued scales of Sobolev spaces, we mention [2], Chapter VII, and [13], Chapter 2.
We will consider system (3.1) in spaces with exponential weight with respect to the time variable. Let \(\rho \in {{\mathbb {R}}}\) and X be a Banach space. For \(u\in L^p({{\mathbb {R}}}_+,X)\), we define \(\Psi _\rho \) as the multiplication operator with \(e^{-\rho t}\), i.e., \(\Psi _\rho u(t) := e^{-\rho t}u(t),\; t\in {{\mathbb {R}}}_+\). The spaces with exponential weights are defined by
with canonical norms \(\Vert u\Vert _{H_{p,\rho }^s({{\mathbb {R}}}_+,X) } := \Vert \Psi _\rho u\Vert _{H_p^s({{\mathbb {R}}}_+,X)}\) and \(\Vert u\Vert _{W_{p,\rho }^s({{\mathbb {R}}}_+,X) } := \Vert \Psi _\rho u\Vert _{W_p^s({{\mathbb {R}}}_+,X)}\). For \(\rho \ge 0\) and \(s>0\), we define \({}_0 H_{p,\rho }^s({{\mathbb {R}}}_+,X)\) and \({}_0 W_{p,\rho }^s({{\mathbb {R}}}_+,X)\) analogously, replacing \(H_p^s\) and \(W_p^s\) by \({}_0H_p^s\) and \({}_0W_p^s\), respectively. For mapping properties and interpolation results under the condition that X is a UMD space, we refer, e.g., to [9], Lemma 2.2. We also make use of homogeneous spaces, e.g., for \(\Omega \subset {{\mathbb {R}}}^n\) we set
and \(\dot{H}_{p,0}^1(\Omega ):=\overline{C^\infty _c(\Omega )}^{\Vert \nabla \cdot \Vert _p}\). The corresponding dual spaces are defined as
see [22] Section 7.2. The homogeneous Sobolev–Slobodeckii spaces \(\dot{W}^s_p({{\mathbb {R}}}^n)\) contain all functions \(u:{{\mathbb {R}}}^n\rightarrow {{\mathbb {R}}}\) such that
where \([s]=\max \{k\in {{\mathbb {N}}}_0;\ k< s\}\), see [26]. Note that we have
for \(1<p<\infty \), \(n\in {{\mathbb {N}}}\), and \(s\in {{\mathbb {R}}}{\setminus }{{\mathbb {Z}}}\), where the latter one denotes the homogeneous Besov space.
We refer to the pertinent monographs [1, 5, 24] for the scalar case and [2, 13] for the X-valued case for properties, characterizations, and relations of the just introduced spaces.
In the following, we denote the time trace \(u\mapsto \partial _t^k u|_{t=0}\) by \(\gamma _k^t\) and the trace to the boundary \(u\mapsto \partial _n^k u|_{{{\mathbb {R}}}^{n-1}}\) by \(\gamma _k\). We set \(J=(0,T)\) for \(T>0\). The solution \((v,p,\eta )\) of (3.1) will belong to the spaces
The function spaces for the right-hand side of (3.1) are given by
By trace results with respect to the time trace, the spaces for the initial values are given by
see the proof of Theorem 3.1 below (necessity part). Note also that in this section we have \(T=\infty \) and that we skipped indicating the \(\rho \) dependence in \({{\mathbb {E}}}_v\), \({{\mathbb {E}}}_p\), etc., since we only deal with weighted time-dependent spaces for the rest of this section. We will also need the following compatibility conditions:
-
(C1)
\( {\mathrm {div\,}}v_0 = g|_{t=0}\) in \(\dot{H}_p^{-1}({{\mathbb {R}}}^{n}_+)\).
-
(C2)
If \(p>\tfrac{3}{2}\), then \(v_0'|_{{{\mathbb {R}}}^{n-1}} = 0\) almost everywhere in \({{\mathbb {R}}}^{n-1}\).
-
(C3)
If \(p>\tfrac{3}{2}\), then \(v_0^n|_{{{\mathbb {R}}}^{n-1}} - \eta _1=0\) almost everywhere in \({{\mathbb {R}}}^{n-1}\).
-
(C4)
There exists an \(\eta _*\in {{\mathbb {E}}}_\eta \) with \(\eta _*|_{t=0} = \eta _0\), \(\partial _t\eta _*|_{t=0}=\eta _1\) and
$$\begin{aligned} (g,\partial _t \eta _*)\in H_{p,\rho }^1(J; \dot{H}_{p,0}^{-1}({{\mathbb {R}}}^n_+)). \end{aligned}$$(3.2)Here, we define
$$\begin{aligned} (g,\partial _t \eta _*)(\phi ) := \int \limits _{{{\mathbb {R}}}^n_+} g\phi dx - \int \limits _{{{\mathbb {R}}}^{n-1}} \partial _t \eta _*\phi dx' \end{aligned}$$for \(\phi \in \dot{H}_{p'}^1({{\mathbb {R}}}^n_+)\). Additionally, we have \((g|_{t=0},\eta _1)=(g|_{t=0}, v_0^n|_{{{\mathbb {R}}}^{n-1}})\) in \(\dot{H}_{p,0}^{-1}({{\mathbb {R}}}^n_+)\).
We remark that only (3.2) is an additional condition, as it was shown in [9], Theorem 4.5, that for every \(\eta _0\in \gamma _0^t{{\mathbb {E}}}_\eta \) and \(\eta _1\in \gamma _1^t{{\mathbb {E}}}_\eta \) there exists an \(\eta _*\in {{\mathbb {E}}}_\eta \) with \(\eta _*|_{t=0} = \eta _0\) and \(\partial _t\eta _*|_{t=0} = \eta _1\).
The main result of this section is the following maximal regularity result.
Theorem 3.1
Let \(p>1\), \(p\ne 3/2\), and \(T=\infty \). Then, there exists a \(\rho _0>0\) such that for every \(\rho \ge \rho _0\), system (3.1) has a unique solution \((v,p,\eta )\in {{\mathbb {E}}}_v\times {{\mathbb {E}}}_p\times {{\mathbb {E}}}_\eta \) if and only if the data \(f_v,g,f_\eta ,v_0,\eta _0,\eta _1\) belong to the spaces above and satisfy the compatibility conditions (C1)–(C4). The solution depends continuously on the data.
The proof of this theorem will be done in several steps and follows from Sects. 3.1–3.4.
3.1 Necessity
Let \((v,p,\eta )\in {{\mathbb {E}}}_v\times {{\mathbb {E}}}_p\times {{\mathbb {E}}}_\eta \) be a solution of (3.1). By standard continuity and trace results, the right-hand sides \(f_v,\) and g as well as the time trace \(v_0\) belong to the spaces above. Noting that \({\mathrm {div\,}}:L^p({{\mathbb {R}}}^n_+)\rightarrow \dot{H}_p^{-1}({{\mathbb {R}}}^n_+)\) is continuous, we have \(g = {\mathrm {div\,}}u \in H_{p,\rho }^1({{\mathbb {R}}}_+;\dot{H}_p^{-1}({{\mathbb {R}}}^n_+)) \subset C([0,\infty );\dot{H}_p^{-1}({{\mathbb {R}}}^n_+))\), and as for all \(p>1\) we also have \(v_0\in W_p^{2-2/p}({{\mathbb {R}}}^n_+)\subset L^p({{\mathbb {R}}}^n_+)\), we obtain the compatibility condition (C1) for all \(p>1\) (see also [22], Theorem 7.2.1).
For \(f_\eta \), note that we have \({{\mathbb {E}}}_\eta \subset H_{p,\rho }^1({{\mathbb {R}}}_+;W_p^{3-1/p}({{\mathbb {R}}}^{n-1})\) by the mixed derivative theorem (see, e.g., [9], Lemma 4.3), and therefore
It is easy to see that the other terms of \(m(\partial _t,\partial ')\eta \) belong to the same space. By standard trace results, we also obtain \(\gamma _1 u\in \gamma _0{{\mathbb {E}}}_p\). Concerning the pressure, we remark that \(\gamma _0:\dot{H}_p^1({{\mathbb {R}}}^n_+) \rightarrow \dot{W}_p^{1-1/p}({{\mathbb {R}}}^{n-1})\) is a retraction, see, e.g., [14], Theorem 2.1, and therefore \(\gamma _0 p\in \gamma _0{{\mathbb {E}}}_p\). This yields \(f_\eta \in \gamma _0{{\mathbb {E}}}_p\). For the time traces of \(\eta \), by putting \({\mathcal {F}}={\mathcal {K}}= W\) and
we can apply [9], Theorem 4.5 which gives \(\eta _0\in \gamma _0^t{{\mathbb {E}}}_\eta \) and \(\eta _1\in \gamma _1^t{{\mathbb {E}}}_\eta \).
If \(p>\frac{3}{2}\), then the boundary trace of \(v_0\) exists in the space \(W_p^{2-3/p}({{\mathbb {R}}}^{n-1})\). This yields the compatibility conditions (C2) and (C3) as equality in the space \(W_p^{2-3/p}({{\mathbb {R}}}^{n-1})\), hence in particular as equality almost everywhere.
To show (C4), we can set \(\eta _* := \eta \). For \(\phi \in \dot{H}_{p'}^1({{\mathbb {R}}}^n_+)\), we obtain
and therefore \((g, \partial _t\eta )\in H_{p,\rho }^1({{\mathbb {R}}}_+; \dot{H}_{p,0}^{-1}({{\mathbb {R}}}^n_+))\). Setting \(t=0\), we obtain \((g|_{t=0}, \eta _1) = (g|_{t=0}, v_0^n)\) as equality in \(\dot{H}_{p,0}^{-1}({{\mathbb {R}}}^n_+)\).
3.2 Reductions
We can reduce some part of the right-hand side of (3.1) to zero by applying known results on the Stokes system. For this, let \((v^{(1)}, p^{(1)})\in {{\mathbb {E}}}_v\times {{\mathbb {E}}}_p\) be the unique solution of the Stokes problem in the half space
The unique solvability of (3.3) follows from [22], Theorem 7.2.1. To show that this theorem can be applied, we remark in particular that the compatibility condition (e) in [22, p. 324] holds because of (C4). Moreover, by the embedding \({{\mathbb {E}}}_\eta \subset H_{p,\rho }^{2-1/(2p)}({{\mathbb {R}}}_+;L^p({{\mathbb {R}}}^{n-1})\cap H_{p,\rho }^1({{\mathbb {R}}}_+;W_p^{2-1/p}({{\mathbb {R}}}^{n-1}) \) and the compatibility condition (C3), we see that also the compatibility condition (d0) in [22, p. 324] holds.
Let \({{\tilde{v}}} := v-v^{(1)} \), \({{\tilde{p}}} := p - p^{(1)}\), and \({\tilde{\eta }} := \eta - \eta _*\). Then, \((v,p,\eta )\) is a solution of (3.1) if and only if \(({{\tilde{v}}},{{\tilde{p}}},{\tilde{\eta }})\) is a solution of
Here,
By the trace results in Subsection 3.1, we have \({{\tilde{f}}}_\eta \in \gamma _0{{\mathbb {E}}}_p\).
3.3 Solution operators for the reduced linearized problem
In the following, we show solvability for the reduced problem (3.4), omitting the tilde again. An application of the Laplace transform formally leads to the resolvent problem
with
We observe that the second and the third line of (3.5) imply that
Hence, the fifth line reduces to
Applying partial Fourier transform in \(x'\in {{\mathbb {R}}}^{n-1}\), we obtain the following system of ordinary differential equations in \(x_n\) for the transformed functions \({{\hat{v}}}\), \({{\hat{p}}}\) and \({\hat{\eta }}\):
Here, we have set \(\omega := \omega (\lambda ,\xi '):=\sqrt{\lambda + |\xi '|^2}\) and
Multiplying the first equation with \((i\xi ',\partial _n)\) and combining it with the second one yields \((-|\xi '|^2+\partial _n^2){\hat{p}}= 0\) for \(x_n>0\). The only stable solution of this equation is given by
Putting the pressure term on the right-hand side, v formally solves a vector-valued heat equation. Hence, to solve the above system we employ the ansatz
with the Green functions subject to Dirichlet resp. Neumann conditions
Here, the traces \({{\hat{p}}}_0\) and \({\hat{\phi }} = ({\hat{\phi }}', {\hat{\phi }}^n)^\tau \) still have to be determined. Note that by choosing \(k_+\) in tangential and \(k_-\) in normal components, the integral parts in formulas (3.7) and (3.8) have vanishing divergence. This follows by a straight-forward calculation, see, e.g., [12], Section 2.6. Thus, \({\mathrm {div\,}}v=0\) enforces
The kinematic boundary condition instantly gives us
Next, by utilizing (3.6), from the tangential boundary condition we obtain
which implies
Multiplying this with \(i\xi '\) and employing the relations (3.9), (3.10) yields
Plugging this into the last line of the transformed system, we obtain
This yields
with
Formula (3.14) defines the solution operator for \(\eta \) as a function of \(f_\eta \) on the level of its Fourier–Laplace transform. The following result is based on the Newton polygon approach and shows that the solution operator is continuous on the related Sobolev spaces. In the following, we consider \((-\Delta ')^{1/2}\) as an unbounded operator in \(L^p_\rho ({{\mathbb {R}}}_+; L^p({{\mathbb {R}}}^{n-1})\) and define \(N_L(\partial _t,(-\Delta ')^{1/2})\) by the joint \(H^\infty \)-calculus of \(\partial _t\) and \((-\Delta ')^{1/2}\) (for details, we refer to, e.g., [9], Corollary 2.9). We will apply the Newton polygon approach on the Bessel potential scale \(H_p^s\) with respect to time and on the Besov scale \(B_{pp}^r\) with respect to space.
Lemma 3.2
(a) There exists a \(\rho _0>0\) such that for all \(\rho \ge \rho _0\), the operator \( N_L(\partial _t, (-\Delta ')^{1/2}):H_N \rightarrow L^p_\rho ({{\mathbb {R}}}_+;B_{pp}^{-1-1/p}({{\mathbb {R}}}^{n-1}) ) \) is an isomorphism, where
(b) Let \(\rho \ge \rho _0\). Then, for every \(f_\eta \in \gamma _0{{\mathbb {E}}}_p\), we have
Proof
(a) We apply the Newton polygon approach developed in [9]. Replacing \(z=|\xi '|\), the r-principle symbols, i.e., the leading terms of \(N_L\) associated with the relation \(\lambda \sim z^r\) are easily calculated as
where \(m_0=m\) for \(\beta =0\), that is
In other words, the associated Newton polygon has the three relevant vertices (6, 0), (2, 2), and \((0,\frac{5}{2})\) and two relevant edges which again reflects the quasi-homogeneity of \(N_L\).
Now, let \({\varphi }\in (0,\pi /2)\) and \(\theta \in (0,{\varphi }/4)\) and put
For \(r\ne 2\), we then obviously have
For \(r=2\), we deduce
By the fact that \(\gamma >0\), we see that
Thus, assuming \({\varphi }\in ({\varphi }_0,\pi /2)\) and \(\theta \in \left( 0,({\varphi }-{\varphi }_0)/4\right) \) we see that (3.15) is satisfied for all \(r>0\). This allows for the application of [9, Theorem 3.3] (setting \(s=0\) and \(r=-1-1/p\) in the notation of [9]) which yields (a).
(b) By (3.14), we have
As \(\Delta '\) is an isomorphism from \(\dot{H}_p^{2+t}({{\mathbb {R}}}^{n-1})\) to \(\dot{H}_p^{t}({{\mathbb {R}}}^{n-1})\) for each \(t\in {{\mathbb {R}}}\), by real interpolation of these spaces (see [14], Lemma 1.1) we see that it is also an isomorphism from \(\dot{B}_{pp}^t({{\mathbb {R}}}^{n-1})\) to \(\dot{B}_{pp}^{t-2}({{\mathbb {R}}}^{n-1})\) for each \(t\in {{\mathbb {R}}}\). In particular, \(\Delta ' f_\eta \in L^p_\rho ({{\mathbb {R}}}_+; \dot{B}_{pp}^{-1-1/p}({{\mathbb {R}}}^{n-1}))\). Using the fact that for \(s<0\) the embedding \(\dot{B}_{pp}^s ({{\mathbb {R}}}^{n-1}) \subset B_{pp}^s( {{\mathbb {R}}}^{n-1})\) holds (see [25, p. 104, (3.339)], [26, Section 3.1]), we obtain the embedding
An application of (a) yields
Now, the mixed derivative theorem in mixed scales (see [8], Proposition 2.76) implies
and we obtain \(\eta \in {{\mathbb {E}}}_\eta \).
For \(u^n := \partial _t \eta \), we immediately get
Finally, the fact that \(m(\partial _t, \partial ')\eta \in \gamma _0{{\mathbb {E}}}_p\) for \(\eta \in {{\mathbb {E}}}_\eta \) was already remarked in Subsection 3.1. \(\square \)
Due to the last result, we obtain the existence of a solution \((v,p,\eta )\) of (3.4). In fact, for \(\eta \), \(\phi ^n\), and \(p_0\) defined as in Lemma 3.2(b), we can define p and v by (the Laplace and Fourier inverse transform of) (3.6) and (3.7)–(3.8), respectively. Here, \(\phi '\) is given by (3.11). As we know that \(\phi ^n\) and \(p_0\) belong to the canonical spaces by Lemma 3.2(b), we get \(v\in {{\mathbb {E}}}_v\) and \(p\in {{\mathbb {E}}}_p\) by standard results on the Stokes equation (see, e.g., [12], Section 2.6, and [22], Section 7.2). By construction, \((v,p,\eta )\) is a solution of (3.4).
3.4 Uniqueness of the solution
To show that the solution of (3.1) is unique, let \((v,p,\eta )\) be a solution with zero right-hand side and zero initial data. Then, the Laplace transform in t and partial Fourier transform in \(x'\) is well-defined, and the calculations above show, in particular, that
for almost all \(\xi '\in {{\mathbb {R}}}^{n-1}\). Therefore, \(\eta =0\) which implies that (v, p) is the solution of the Dirichlet Stokes system with zero data. Therefore, \(v=0\) and \(p=0\).
This finishes the proof of Theorem 3.1.
Remark 3.3
Theorem 3.1 was formulated on the infinite time interval \((0,\infty )\) with exponentially weighted spaces with respect to t. As usual in the theory of maximal regularity, we obtain the same results on finite time intervals \(t\in J = (0,T)\) with \(T<\infty \) without weights, i.e., with \(\rho =0\). This is due to the fact that on finite time intervals the weighted and unweighted norms are equivalent and that there exists an extension operator from (0, T) to \((0,\infty )\) acting on all spaces above.
Therefore, the results of Theorem 3.1 hold with \(\rho =0\) on the finite interval \(J=(0,T)\). As we consider the nonlinear equation on a finite time interval, we will replace the function spaces above by \({{\mathbb {E}}}_v := H^1(J; L^p({{\mathbb {R}}}^n_+))\cap L^p(J;H_p^2({{\mathbb {R}}}^n_+))\), etc., keeping the same notation.
4 The nonlinear system
To prove mapping properties of the nonlinearities, we employ sharp estimates for anisotropic function spaces provided in [15]. In fact, we can proceed very similar as in [15, Section 5.2, Proposition 5.6]. For \(\omega _j\in {{\mathbb {N}}}_0\), \(j=1,\ldots ,\nu \), we define a weight vector as \(\omega :=(\omega _1,\ldots ,\omega _\nu )\) and denote by \({\dot{\omega }}:=\mathrm {lcm}\{\omega _1,\ldots ,\omega _\nu \}\) the lowest common multiple. Further, for \(n=(n_1,\ldots ,n_\nu )\in {{\mathbb {N}}}^\nu \) we write
The (generalized) Sobolev index of an E-valued anisotropic function space then reads as
where \(\omega \cdot n=\sum _{j=1}^\nu \omega _jn_j\). Note that we have the corresponding definition, if \({{\mathbb {R}}}^n\) is replaced by a Cartesian product of intervals. For an introduction to anisotropic spaces above, we refer to [2, 15] and the references cited therein. In particular, it is possible to represent the anisotropic spaces as intersections (see [2, Section VII.3.5]). In the situation considered here, we always have \(\omega =(2,1)\), and we obtain the equality
for \(s>0\), which can be seen as the definition of the anisotropic space. The analog representation holds for the anisotropic scales \( W^{s,(2,1)}_p\) and \(B_{p,q}^{s,(2,1)}\).
Now, let \(J=(0,T)\). By the mixed derivative theorem, see, e.g., [9, Lemma 4.3], we have
This yields
for \(\eta \in {{\mathbb {E}}}_3\). Again by the mixed derivative theorem, we have
which gives us
for \(\eta \in {{\mathbb {E}}}_3\) and \(j = 1,\,\dots ,\,n - 1\). Analogously, we obtain that
for \(\eta \in {{\mathbb {E}}}_3\) and \(j,\,k = 1,\,\dots ,\,n - 1\).
For the velocity, we have
Another application of the mixed derivative theorem yields
for \(j,\,k = 1,\,\dots ,\,n\). Taking trace, this also implies
for \(j = 1,\,\dots ,\,n\).
Now, we denote by L the linear operator on the left-hand side of system (2.3) and by \(N=(F_v,G,0,0,H_\eta ,0,0,0)\) its nonlinear right-hand side. Then, (2.3) is reformulated as
We also set
The nonlinearity admits the following properties.
Theorem 4.1
Let \(p\ge (n+2)/3\). Then, \(N\in C^\omega ({\widetilde{{{\mathbb {E}}}}},{\widetilde{{{\mathbb {F}}}}})\), \(N(0)=0\), and we have \(DN(0)=0\) for the Fréchet derivative of N.
Proof
Mapping properties of \(F_v\). Gathering (4.1), (4.3), and (4.5), we can estimate the term
as desired, provided the vector-valued embedding
does hold. Applying [15, Theorem 1.7], this readily follows if at least one of the two indices \(\text{ ind}_1\), \(\text{ ind}_2\) is non-negative. The strictest condition to be fulfilled by [15, Theorem 1.7], however, is \(\text{ ind}_1 + \text{ ind}_2 \ge \text{ ind }\) in case that both of the indices on the left-hand side are negative which can occur for small p. It is easily seen that this condition is equivalent to
For the terms
we employ (4.2), (4.6) and the vector-valued embeddings
for \(m = 1,\,2\). Due to [15, Theorem 1.9], the above embeddings are valid, provided that \(\text{ ind}_1 > 0\) or, equivalently,
Next, (4.4) and (4.5) show that we obtain the desired estimate of the term \((v \cdot \nabla )v\), if
This is guaranteed by [15, Theorem 1.7] if \(\max \,\{\,\text{ ind}_1,\,\text{ ind}_2\,\} \ge 0\). Again, for small values of p both of the indices on the left-hand side can become negative. Then, [15, Theorem 1.7] implies the embedding above if \(\text{ ind}_1 + \text{ ind}_2 \ge \text{ ind }\), which is equivalent to (4.10).
Thanks to (4.2) and (4.5), the term \((v' \cdot \nabla ' \eta )\partial _nv\) can be estimated by utilizing the embedding
Note that here we also employ
and \(H^1_p({{\mathbb {R}}}_+)\cdot L^p({{\mathbb {R}}}_+){\hookrightarrow }L^p({{\mathbb {R}}}_+)\) which is valid due to the Sobolev embedding \(H^1_p({{\mathbb {R}}}_+){\hookrightarrow }L^\infty ({{\mathbb {R}}}_+)\) for \(p>1\). Thanks to [15, Theorem 1.7] (4.13) holds, if \(\min \,\{\,\text{ ind}_1,\,\text{ ind}_2,\,\text{ ind}_3\,\} \ge 0\). If at least one of the three indices on the left-hand side is negative, then the sum of the negative indices on the left-hand side has to exceed the index on the right-hand side. The most restrictive constraint hence results from \(\text{ ind}_1 + \text{ ind}_2 + \text{ ind}_3 \ge \text{ ind }\), which is fullfilled if
Consequently, by our assumptions \(F_v\) has the desired mapping properties, since (4.10) also yields (4.12) and (4.14).
Mapping properties of G. First, we show \(G(v,\eta ) \in H^1_p(J,\,{\dot{H}}^{-1}_p({{\mathbb {R}}}^n_+))\). Integration by parts yields \(\partial _n \in {{\mathscr {L}}}(L_p(J \times {{\mathbb {R}}}^n_+),\,L_p(J,\,{\dot{H}}^{-1}_p({{\mathbb {R}}}^n_+)))\). Using this property and the fact that \(\eta \) does not depend on \(x_n\), it is sufficient to estimate the terms
in \(L_p(J \times {{\mathbb {R}}}^n_+)\). Thanks to (4.1) and the mixed derivative theorem, we know
The first term can thus be estimated by the vector-valued embedding
According to [15, Theorem 1.7], this embedding is again valid, if we have \(\max \,\{\,\text{ ind}_1,\,\text{ ind}_2\,\} \ge 0\) or if \(\text{ ind}_1 + \text{ ind}_2 \ge \text{ ind }\) in case that both indices on the left-hand side are negative. The latter condition is again equivalent to (4.10).
The second term may be estimated by employing (4.2), the vector-valued embedding (4.11) for \(m = 1\), and \(\partial _t v\in L^p(J\times {{\mathbb {R}}}^{n-1},L^p({{\mathbb {R}}}_+))\) under constraint (4.12).
To see that also \(G(v,\eta ) \in L^p(J,H^1_p({{\mathbb {R}}}^n_+))\), we estimate the terms
in \(L^p(J \times {{\mathbb {R}}}^n_+)\). Similar as above, this may be accomplished by utilizing (4.2), (4.3), (4.5), (4.6) in combination with the vector-valued embeddings (4.9), and (4.11). Once more, this is feasible if (4.10) holds.
Mapping properties of \(H_\eta \). Note that \(W^{1 - 1/p, (2,1)}_p(J\times {{\mathbb {R}}}^{n-1}))\,{\hookrightarrow }\, \gamma _0{{\mathbb {E}}}_p\). Hence, according to (4.2) and (4.5) we can estimate the terms
as desired provided that the embedding
is at our disposal. By [15, Theorem 1.9], this is the case if \(\text{ ind}_1 > 0\). Hence, the nonlinearity \(H_\eta \) has the desired mapping properties, provided that \(p>(n+2)/4\). This, in turn, is true since (4.10) is satisfied.
Altogether we have proved the asserted embeddings, i.p. that \(N({\widetilde{{{\mathbb {E}}}}})\subset {\widetilde{{{\mathbb {F}}}}}\). The claimed smoothness of N as well as \(N(0)=0\) and \(DN(0)=0\) follows obviously by the fact that N consists of polynomial nonlinearities which are of quadratic or higher order. \(\square \)
For a Banach space E, we denote by \(B_E(x,r)\) the open ball in E with radius \(r>0\) centered in \(x\in E\). Based on Theorems 3.1 and 4.1, we can derive well-posedness of (2.3) for small data. For simplicity, we also set
Theorem 4.2
Let \(p\ge (n+2)/3\) and \(T>0\). Then, there is a \(\kappa =\kappa (T)>0\) such that for \((f_v,g,0,0,f_\eta ,v_0,\eta _0,\eta _1)\in B_{{\widetilde{{{\mathbb {F}}}}}}(0,\kappa )\) satisfying the compatibility conditions (C2)–(C4) and
there is a unique solution \((v,p,\eta )\in {{\mathbb {E}}}\) of system (2.3). The solution depends continuously on the data.
Proof
We pick \(f:=(f_v,g,0,0,f_\eta ,v_0,\eta _0,\eta _1)\) as assumed. System (2.3) (including exterior forces) reads as
We first have to verify that the right-hand side belongs to \({{\mathbb {F}}}\). Observe that (4.15) gives (C1). Hence, by our assumptions the compatibility conditions (C1)–(C3) are satisfied. To see compatibility condition (C4), we have to verify that there exists an \(\eta _*\in {{\mathbb {E}}}_\eta \) satisfying \((\eta _*,\partial _t\eta _*)|_{t=0}=(\eta _0,\eta _1)\) and
for every triple \((v,p,\eta )\in {{\mathbb {E}}}\) such that \((v,\eta ,\partial _t\eta )|_{t=0}=(v_0,\eta _0,\eta _1)\). Note that by assumption there is an extension \(\eta _*\in {{\mathbb {E}}}_\eta \) with the prescribed traces such that
Hence, it suffices to prove that
For \(\phi \in {\dot{H}}^1_{p}({{\mathbb {R}}}^n_+)\), we observe that thanks to \(v'(x',0)=0\) we obtain
In order to deduce (4.17), it hence suffices to prove that
Thanks to (4.2) and (4.4), this follows from the embedding
Applying once again [15, Theorem 1.9], we see that this is fulfilled if \(\text{ ind }\bigl (W^{4-1/p,(2,1)}_p(J\times {{\mathbb {R}}}^{n-1})\bigr )>0\). This, in turn, holds if \(p>(n+2)/4\) which is implied by our assumption \(p\ge (n+2)/3\). Thus, (4.17) follows.
Altogether we have proved that \((f_v,g,0,0,f_\eta ,v_0,\eta _0,\eta _1)\in B_{{\widetilde{{{\mathbb {F}}}}}}(0,\kappa )\) satisfying the compatibility conditions (C2)–(C4) and (4.15) implies that \(N(w)+f\in {{\mathbb {F}}}\) for \(w\in \overline{B_{{\mathbb {E}}}(0,r)}\). Hence, the right-hand side of (4.16) belongs to \({{\mathbb {F}}}\), and we can define
We now prove that K is a contraction on \(\overline{B_{{\mathbb {E}}}(0,r)}\) for \(r>0\) small enough. Theorem 3.1 yields that \(L\in {{\mathscr {L}}}_{is}({{\mathbb {E}}},{{\mathbb {F}}})\). This and the mean value theorem imply
Fixing \(r>0\) such that \(\sup _{v\in B_{{\mathbb {E}}}(0,r)}\Vert DN(v)\Vert _{{{\mathscr {L}}}({{\mathbb {E}}},\widetilde{{{\mathbb {F}}}})}\le 1/2C\), which is possible thanks to Theorem 4.1, we see that K is contractive. The estimate above and Theorem 4.1 also imply
Choosing \(\kappa \le r/2C\), we see that K is indeed a contraction on \(\overline{B_{{\mathbb {E}}}(0,r)}\). The contraction mapping principle gives the result. \(\square \)
By the equivalence of the systems (1.1) and (2.3) given through the diffeomorphic transform introduced in Sect. 2, it is clear that Theorem 4.2 implies our main result Theorem 1.1.
References
Adams, D., Hedberg, L.: Function Spaces and Potential Theory. Grundlehren der Mathematischen Wissenschaften, vol. 314. Springer, Berlin (1995)
Amann, H.: Linear and Quasilinear Parabolic Problems. Vol. II, volume 106 of Monographs in Mathematics. Birkhäuser/Springer, Cham (2019)
Badra, M., Takahashi, T.: Feedback boundary stabilization of 2d fluid–structure interaction systems. Discrete Cont. Dyn. Syst. 37(5), 2315–2373 (2017)
Beirão da Veiga, H.: On the existence of strong solutions to a coupled fluid–structure evolution problem. J. Math. Fluid Mech. 6, 21–52 (2004)
Bergh, J., Löfström, J.: Interpolation Spaces. Springer, Berlin (1976)
Chambolle, A., Desjardin, B., Esteban, M.J., Grandmont, C.: Existence of weak solutions for the unsteady interaction of a viscous fluid with an elastic plate. J. Math. Fluid Mech. 7, 368–404 (2005)
Coutand, D., Shkoller, S.: The interaction between quasilinear elastodynamics and the Navier–Stokes equations. Arch. Ration. Mech. Anal. 179(3), 303–352 (2006)
Denk, R., Kaip, M.: General Parabolic Mixed Order Systems in \({L_p}\) and Applications. Operator Theory: Advances and Applications, vol. 239. Birkhäuser/Springer, Cham (2013)
Denk, R., Saal, J., Seiler, J.: Inhomogeneous symbols, the Newton polygon, and maximal \(L^p\)-regularity. Russ. J. Math. Phys. 15(2), 171–191 (2008)
Grandmont, C.: Existence of weak solutions for the unsteady interaction of a viscous fluid with an elastic plate. SIAM J. Math. Anal. 40, 716–737 (2008)
Grandmont, C., Hillairet, M.: Existence of global strong solutions to a beam-fluid interaction system. Arch. Ration. Mech. Anal. 220(3), 1283–1333 (2016)
Hieber, M., Saal, J.: The Stokes Equation in the \(L^p\)-Setting: Well-Posedness and Regularity Properties, pp. 117–206. Springer, Cham (2018)
Hytönen, T., van Neerven, J., Veraar, M., Weis, L.: Analysis in Banach Spaces. Vol. I. Martingales and Littlewood–Paley Theory, volume 63 of Ergebnisse der Mathematik und ihrer Grenzgebiete. Springer, Cham (2016)
Jawerth, B.: The trace of Sobolev and Besov spaces if \(0<p<1\). Stud. Math. 62(1), 65–71 (1978)
Köhne, M., Saal, J.: Multiplication in vector-valued anisotropic function spaces and applications. arXiv:1708.08593
Lengeler, D.: Weak solutions for an incompressible, generalized Newtonian fluid interacting with a linearly elastic Koiter type shell. SIAM J. Math. Anal. 46(4), 2614–2649 (2014)
Lengeler, D., R\(\mathring{u}\)žička, M.: Weak solutions for an incompressible Newtonian fluid interacting with a Koiter type shell. Arch. Ration. Mech. Anal. 211(1), 205–255 (2014)
Lequeurre, J.: Existence of strong solutions to a fluid–structure system. SIAM J. Math. Anal. 43, 389–410 (2011)
Lequeurre, J.: Existence of strong solutions for a system coupling the Navier-Stokes equations and a damped wave equation. J. Math. Fluid Mech. 15, 249–271 (2013)
Maity, D., Takahashi, T.: \(L^p\) theory for the interaction between the incompressible Navier–Stokes system and a damped beam. Preprint hal-02294097, Sept. (2019)
Muha, B., Čanić, S.: Fluid–structure interaction between an incompressible, viscous 3D fluid and an elastic shell with nonlinear Koiter membrane energy. Interfaces Free Bound. 17(4), 465–495 (2015)
Prüss, J., Simonett, G.: Moving Interfaces and Quasilinear Parabolic Evolution Equations. Monographs in Mathematics, vol. 105. Birkhäuser/Springer, Cham (2016)
Quarteroni, A., Tuveri, M., Veneziani, A.: Computational vascular fluid dynamics: problems, models and methods. Comput. Vis. Sci. 2(4), 163–197 (2000)
Triebel, H.: Interpolation Theory, Function Spaces, Differential Operators. North Holland, Amsterdam (1978)
Triebel, H.: Hybrid Function Spaces, Heat and Navier-Stokes Equations, volume 24 of EMS Tracts in Mathematics. European Mathematical Society (EMS), Zürich (2014)
Triebel, H.: Tempered Homogeneous Function Spaces. EMS Series of Lectures in Mathematics. European Mathematical Society (EMS), Zürich (2015)
Funding
Open Access funding provided by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Denk, R., Saal, J. \(L^p\)-theory for a fluid–structure interaction model. Z. Angew. Math. Phys. 71, 158 (2020). https://doi.org/10.1007/s00033-020-01387-5
Received:
Revised:
Published:
DOI: https://doi.org/10.1007/s00033-020-01387-5