
Abstract
The numerical solution for the system of equations of heat friction dynamics (HFD) is obtained for the pad-disc tribosystem for use in intermittent braking mode (RST). The system of HFD equations is formulated, considering the temperature dependence of mechanical and thermal physical properties of materials, as well as the friction coefficient. The pattern of the perfect thermal contact of two sliding layers with frictional heat generation taken into account is chosen as a calculation model. The numerical analysis of the metal ceramic pad-cast iron disc friction pair is made. The RST mode consisting of three full (braking-acceleration) cycles and one incomplete (braking) cycles is studied. The change at each braking in the interconnected flashpoint, average temperature of the friction region, volumetric and maximal temperatures of the tribosystem, sliding speed, specific power, and friction coefficient is investigated.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
INTRODUCTION
An intermittent brake operation mode is characterized by recurrent braking-acceleration (heating-cooling) cycles. The characteristics of a friction pair used in intermittent mode are designed by solving the system of heat friction dynamics (HFD) equations [1]. In this case, the initial motion problem and the thermal friction problem as the system’s main components are solved either in sequence (divided pattern) or synchronously (complementary pattern). In the former case, the first step is to determine the time profiles of friction velocity and specific friction power, which is followed by using them in thermal brake design. If there are available data on the frictional resistance tests of the target pair that allow recording the functional dependence of the friction coefficient on temperature, the calculations will be made according to the complementary pattern, taking into account the velocity-temperature correlation [2].
The complementary pattern of solving the system of HFD equations, considering the relation among the average, the volumetric temperature, and the flashpoint of the brake used in intermittent mode was first implemented in the works written by professor A.V. Chicinadze and his disciples [2]. In our proposed design technique, the frictional heat generation in the actual disk-pad system was replaced with the linear problem of the separate heating of two different layers by heat flows at an intensity pro rata with the specific friction power. The changes in the mechanical and thermal physical properties of the pad’s and the disk’s material at each braking were considered by using the values of those properties calculated for the average integral volume temperature of the tribosystem from the respective test curves. To calculate the disk’s maximal temperature in intermittent braking mode by the FEM, we considered the current, temperature-dependent coefficient of friction and heat conduction, and the Brinell hardness of the rubbing pair’s materials [14]. We exposed the pad and the disk to separate frictional heatings, in which the thermal fields of those elements were interconnected through the heat flows partition coefficient.
This article is aimed at modifying the unidimensional nonlinear complementary system of HDF equations for one-time braking [15] in intermittent disk brake operation mode, considering the sliding speed-temperature ratio at each braking and using the derived numerical solution of this system to study the influence of the braking number on the change in such characteristics such as temperature, speed, specific capacity, and friction coefficient.
FORMULATION OF THE PROBLEM
Braking Pattern
Let us consider a disk brake’s intermittent operation mode consisting in the gradual completion of \((n - 1)\) full cycles and an \(n\)th interrupted cycle. Each of the full cycles consists from two phases. In the first phase (braking), linear sliding velocity \(V\) decreases from initial value \({{V}_{0}}\) to zero for a period of \(t = {{t}_{{{{s}_{k}}}}},k = 1,2,...,n - 1.\) Then, when the brake is switched off, the second phase starts and continues for \(t = {{t}_{c}}\) when the velocity increases to initial value \({{V}_{0}}\). Thus, the time needed for completing the full cycles is \({{t}_{n}} = \sum\nolimits_{k = 1}^{n - 1} {{{t}_{k}}} \), where \({{t}_{k}} = {{t}_{{{{s}_{k}}}}} + {{t}_{c}}\) and \(k = 1,2,...,n - 1\) is the cycle’s duration. In the last interrupted cycle performed with the brake switched on, velocity \(V\) again drops from initial value \({{V}_{0}}\) to zero at stopping instant \(t = {{t}_{{{{s}_{n}}}}}\). The overall period of this operation mode is \({{t}_{b}} = {{t}_{n}} + {{t}_{{{{s}_{n}}}}}\).
Approximating Test Data
In the disk brake’s single and, even more so, intermittent, heavy thermal operation mode, not only the surface temperature but also the volume temperature exceeds \(450^\circ {\text{C}}\) [16]. Thus, the thermal physical properties of the disk and pad materials before the braking and at stopping may significantly differ. Elevated temperatures also affect the friction coefficient value. Thus, we assume that heat conduction coefficient \({{K}_{l}}\), specific heat capacity \({{c}_{l}}\), and density \({{\rho }_{l}}\) of the friction pair materials, as well as friction coefficient \(f\), are functions of temperature \(T\) and recorded as
where \({{K}_{{l,j}}}\), \({{c}_{{l,j}}}\), \({{\rho }_{{l,j}}}\), \({{f}_{j}}\), \(l = 1,2\); \(j = 1,2,...,7\) are the approximation coefficients of the respective test data resulting from the frictional heat resistance tests of the materials [2]. All of the quantities applied to the disk and the pad hereafter have subscripts \(l = 1\) and \(l = 2\), respectively.
Maximal Temperature
We shall use the temperature summation hypothesis to record the change in maximal braking temperature \({{T}_{{\max }}}\) [1] as
Average Temperature of the Contact’s Nominal Region
The system of the frictional contact of two heterogeneous layers \(0 \leqslant z \leqslant {{d}_{1}}\) (disk) and \( - {{d}_{2}} \leqslant z \leqslant 0\) (pad) that slide at relative speed \(V(t) = {{V}_{0}}V{\kern 1pt}^{*}{\kern 1pt} (t)\), as well as are compressed at a normal pressure, are used as the design geometric pattern for determining \({{T}_{m}}\):
Nonstationary temperature field \(T(z,t)\) of this tribosystem is initiated by the frictional heat generation at braking and found by solving the following thermal friction problem:
Temperature of the Contact’s Actual Region
The evolution of flashpoint \({{T}_{f}}\) was calculated by the empirical formulas for the contact pattern of the microasperities of rubbing surfaces [17] as
where \({{\kappa }_{i}}\), \(i = 1,2,3\) are the coefficients determined by experiment.
Average Volume Temperature
The average volume temperature of the disk-pad friction pair before the start of the \(k\)th braking was calculated by the formulas from [2] as
whereas the formulas used after the \(k\)th braking were
Initial Motion Problem
A drop in speed \(V(t) = {{V}_{0}}V{\kern 1pt} ^{*}{\kern 1pt} (t)\) at the \(k\)th braking was found by solving the initial motion problem [15] as
where rated specific friction power \({{q}_{0}}\) and dimensionless time profile of friction force \(F{\kern 1pt}^{*}{\kern 1pt} (t)\) are shown in the form of (16). The duration of each braking was determined from the halt condition as
In the acceleration phases, the speed linearly increased with time as
Correlations (1)—(26) are determined as the mathematical recorded system of HFD equations for the considered intermittent braking mode. Such key elements of this system, as the boundary problem of heat conduction, considering the heat generation by friction in (9)—(16), flashpoint calculation formulas (17), volume temperature formulas (18)—(22), and initial motion problem (22)—(26) are interrelated through friction coefficient \(f\) (16) dependent from maximal temperature \({{T}_{{\max }}}\) (7).
Solving the System of HFD Equations
We shall switch to the dimensionless variables and parameters recorded below as
and thus record formulas and equations (7)—(17), (23)—(25) as
The boundary problem of heat conduction (27)—(37) is essentially nonlinear since it contains both internal (in differential operators (28) and (29)) and external (in boundary conditions (30), (32), and (33)) nonlinearities. We shall solve this problem by integral interpolative discretization from [18] and introduce the following lattices in tribocoupling elements:
and record
Considering formulas (36)—(40) after the respective transformations made to replace the differential operators by dimensionless spatial variable \(\zeta \) with their finite difference analogs, we shall record the nonlinear boundary problem of heat conduction (28)—(34) as
According to boundary condition (31), we have \(T_{{1,0}}^{*}(\tau ) = T_{{2,0}}^{*}(\tau ) \equiv T_{m}^{*}(\tau )\), \(0 < \tau \leqslant {{\tau }_{{{{s}_{k}}}}}\); therefore, system \({{n}_{1}} + {{n}_{2}} + 1\) of common differential equations (41)—(46) contains the same number of sought-for functions \(T_{{l,j}}^{*}(\tau )\). The tribosystem’s dimensionless volume temperature \(T_{0}^{{*(k)}}\) included in initial condition (46) was calculated by formulas (18)—(21). It is important to note that initial motion problem (37) and heat conduction problems (41)—(46) are conjugate to each other through the friction coefficient dependent from maximal temperature (27). Thus, both problems were solved synchronously in the DIFSUB suite [19]. The maximal number of units for having a relative calculation accuracy of 0.1% was \({{n}_{1}} = 20\) and \({{n}_{2}} = 40\) for the disk and pad, respectively.
We shall note that the speed and temperature at constant friction coefficient \(f = {{f}_{0}}\) are no longer interdependent. In this case, the divided pattern of solving the system of HFD equations consists in solving the initial motion problem (37) and then, at the known time profile of speed \(V{\kern 1pt}^{*}{\kern 1pt} (\tau ) = 1 - {\tau \mathord{\left/ {\vphantom {\tau {\tau _{s}^{0}}}} \right. \kern-0em} {\tau _{s}^{0}}} + p{\kern 1pt}^{*}{\kern 1pt} (\tau ){{{{\tau }_{m}}} \mathord{\left/ {\vphantom {{{{\tau }_{m}}} {\tau _{s}^{0}}}} \right. \kern-0em} {\tau _{s}^{0}}}\), \(0 \leqslant \tau \leqslant {{\tau }_{{{{s}_{k}}}}}\), \({{\tau }_{{{{s}_{k}}}}} \cong \tau _{s}^{0} + 0.99{{\tau }_{m}}\), \(k = 1,2,...,n\) [20], in determining the temperature by solving initial problem (41)—(46). As a result, the time profile of speed and the stop time are equal at each braking.
Numerical Analysis
We studied the intermittent thermal operational mode of the disk-pad tribosystem for three full cycles and an interrupted cycle (\(n = 4\)) with such input parameters, as \({{f}_{0}} = 0.448\), \({{p}_{0}} = 1.47\) mPa, \({{V}_{0}} = 28\) mps, \({{W}_{0}} = 392.1\) kJ, \({{t}_{i}} = 0.5\) s, \({{t}_{c}} = 5\) s, \({{d}_{1}} = 5.5\) mm, \({{d}_{2}} = 10\) mm, \({{r}_{1}} = {{r}_{2}} = 76.5\) mm, \({{R}_{1}} = {{R}_{2}} = 113.5\) mm, \({{\phi }_{0}} = \pi \), \(h = 100\) W/(m2 K), \({{T}_{0}} = 20^\circ {\text{C}}\). The disk was made from gray cast iron CHNMH (\({{K}_{{1,0}}}\) = 52.17 W/(m К), \({{c}_{{1,0}}} = 444.6\) J/(kg К), \({{\rho }_{{1,0}}} = 7100\) kg/m3), whereas the pad was made from ceramic metal material FMC-11 (\({{K}_{{2,0}}} = 35\) W/(m K), \({{c}_{{2,0}}} = 478.9\) J/(kg К), \({{\rho }_{{1,0}}} = 4700\) kg/m3) [2]. The values of coefficients \({{K}_{{l,j}}}\), \({{c}_{{l,j}}}\), \({{\rho }_{{l,j}}}\), \({{f}_{j}}\), \(j = 1,2,...,7\); \(l = 1,2\) in formulas (1)—(6) and \({{\kappa }_{i}}\), \(i = 1,\,2,\,3\), in correlations (17) for the CHNMH/ FMC-11 friction pair are provided in study [15]. The calculations were made taking into account the change in the friction coefficient at braking \(f(t) = {{f}_{0}}f{\kern 1pt}^{*}{\kern 1pt} [{{T}_{{\max }}}(t)]\) (variant 1, solid curves) and at constant friction coefficient \(f = {{f}_{0}}\) (variant 2, dashed curves).
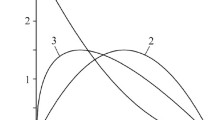
The change with time of maximal temperature \({{T}_{{\max }}}\), average friction surface temperature \({{T}_{m}}\), and flashpoint \({{T}_{f}}\) for four brakings is shown in Fig. 1. The highest values of these temperatures, as well as the values of average volume temperatures (18)—(22) before start \(T_{0}^{{(k)}}\) and after completion \(T_{s}^{{(k)}}\), \(k = 1,2,3,4\) of each braking, are shown in Table 1, where braking durations \({{t}_{{{{s}_{k}}}}}\), \(k = 1,2,3,4\), are shown as well. The tribosystem’s volume, average, and maximal temperature rises with each braking. The maximal flashpoint is observed in the initial phase of each braking and rapidly decreases with time. Thus, the maximal values of \({{T}_{f}}\) decrease with an increase in the number of brakings. This evolution of the flashpoint stems from the plastic straining of microasperities of the rubbing pad and disk surfaces, which is implied in formulas (17). The maximal temperature at each braking, determined by the temperature relation of the friction coefficient (variant 1), is always lower than this coefficient’s constant (initial) value (variant 2). The difference in the highest maximal temperatures determined for these two variants increases with each subsequent braking.

Change in time of maximal temperature Tmax, average friction surface temperature Tm, and flashpoint Tf, considering (solid curves) and not considering (dashed curves) the temperature dependence of the friction coefficient at braking one (a), two (b), three (c), and four (d).
The duration of individual brakings extends with an increase in the number of brake actuations (variant 1) or remains unchanged (variant 2). The duration of four brakings was t4 = 10.16 and 6.22 s for variants 1 and 2, respectively. The overall brake operation duration is tb = 25.16 (variant 1) and 21.22 s (variant 2).
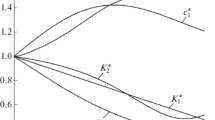
The changes with time in speed of advance \(V\), friction coefficient \(f\), and specific friction power \(q\) are shown in Fig. 2. The speed decreases linearly but for the short period after the start of braking (Fig. 2а). The first braking is the shortest one, and the stop duration increases with each subsequent braking phase (variant 1). Since the frictional heat resistance curve for the considered friction pair is an almost linearly decreasing function of temperature, the friction coefficient evolves (Fig. 2b) in the manner contrary to the evolution of the change in the maximal temperature with time (Fig. 1). A reduction in \(f\) occurs with the start of each braking, which continues up to the moment coinciding with the moment reaching the highest value of \({{T}_{{\max }}}\). The friction coefficient rises in the subsequent period of a minor drop in \({{T}_{{\max }}}\) until stopping. The most and least significant reduction in \(f\) are observed at the first and fourth braking, respectively (variant 1). The results presented in Fig. 2b were used to determine average friction coefficient \({{f}_{m}}\), its stability \({{f}_{s}} = {{{{f}_{m}}} \mathord{\left/ {\vphantom {{{{f}_{m}}} {{{f}_{{\max }}}}}} \right. \kern-0em} {{{f}_{{\max }}}}}\), fluctuation \({{f}_{f}} = {{{{f}_{{\min }}}} \mathord{\left/ {\vphantom {{{{f}_{{\min }}}} {{{f}_{{\max }}}}}} \right. \kern-0em} {{{f}_{{\max }}}}}\), and braking efficiency \({{f}_{{{\text{eff}}}}} = {{{{f}_{s}}} \mathord{\left/ {\vphantom {{{{f}_{s}}} {t_{{{{s}_{k}}}}^{2}}}} \right. \kern-0em} {t_{{{{s}_{k}}}}^{2}}}\), \(k = 1,2,3,4\) (Table 2). All of the brakings are highly stable, although the first braking was the most efficient one for the chosen friction pair. The braking efficiency decreases with an increase in the number of brake actuations.

Time profiles of speed V (a), friction coefficient f (b), and specific friction power q (c), considering (solid curves) and not considering (dashed curves) the temperature dependence of the friction coefficient, at each of the four brakings.
The timeline of specific friction power \(q\) (16) corresponds to rational braking characterized by the maximum within the braking range (Fig. 2c). The areas under all of the curves are equal, which indicates that the equality conditions in full friction effort at each braking are fulfilled.
CONCLUSIONS
We have formulated and derived the numerical solution of the nonlinear single-dimension system of HFD equations for the disk-pad tribosystem used in intermittent mode. The calculations for the cast iron disk (CHNMKH) and the ceramic metal pad (FMC-11) have been made based on the material’s thermal sensitivity and friction coefficient. The influence of the number of brakings on the evolution of temperature, speed, specific power, and coefficient of friction has been studied. The volumetric and the maximal temperature rise with each subsequent braking, as well as at halt (the latter increases from 2.16 s at the first braking to 2.94 at the fourth (quadruple) braking). The time profile of the friction coefficient is pretty much stable (\( \geqslant {\kern 1pt} 0.775\)), whereas its efficiency decreases from 0.168 to 0.0896 with an increase in the number of brakings.
NOTATION
\({{c}_{l}}\) is heat capacity ratio
\({{d}_{l}}\) is layer thickness
\(f\) is friction coefficient
\({{f}_{0}}\) is rated friction coefficient
\(F\) is friction force
\(h\) is the coefficient of heat exchange between the buildup’s free surface and the environment
\({{K}_{l}}\) is the heat conduction coefficient
\(n\) is the number of brakings
\({{n}_{l}}\) is the number of nodes in the partitioning mesh
\(p\) is pressure
\({{p}_{0}}\) is rated pressure
\(q\) is specific friction power
\({{q}_{0}}\) is rated specific friction power
\({{r}_{l}}\) is internal radius
\({{R}_{l}}\) is external radius
\(T\) is temperature
\({{T}_{0}}\) is ambient temperature
\({{T}_{{\max }}}\) is maximal temperature
\({{T}_{m}}\) is the average temperature of the nominal region of contact
\({{T}_{f}}\) is the temperature of the actual region of contact (flashpoint)
\(T_{0}^{{(k)}}\) is the volume temperature before the start of the \(k\)th braking
\(T_{s}^{{(k)}}\) is the volume temperature after the \(k\)th braking
\(t\) is time
\({{t}_{c}}\) is the duration of acceleration
\({{t}_{{{{s}_{k}}}}}\) is the duration of the \(k\)th braking
\({{t}_{i}}\) is the pressure increment time
\(V\) is velocity
\({{V}_{0}}\) is initial velocity
\({{W}_{0}}\) is the initial kinetic energy of the tribosystem
\(z\) is the spatial coordinate
\({{\rho }_{l}}\) is density
\(2{{\phi }_{0}}\) is the pad expansion angle
The respective subscripts for the disk and the pad are \(l = 1\) and \(l = 2\)
REFERENCES
Chichinadze, A.V., Raschet i issledovanie vneshnego treniya pri tormozhenii (Calculation and Study of External Friction during Braking), Moscow: Nauka, 1967.
Chichinadze, A.V., Braun, E.D., Ginzburg, A.G., and Ignat’eva, Z.V., Raschet, ispytanie i podbor friktsionnykh par (Calculation, Testing, and Choice of Friction Pairs), Moscow: Nauka, 1979.
Lee, K., Numerical Prediction of Brake Fluid Temperature Rise During Braking and Heat Soaking: SAE Technical Paper No. 1999-01-2571, Warrendale, PA: SAE Int., 1999, pp. 1–9.
Nosko, A.L. and Nosko, A.P., Cooling of braking devices of lifting-and-transport machines, Vestn. Mosk. Gos. Tekh. Univ. im. N.E. Baumana, Ser. Mashinostr., 2005, no. 5, pp. 88–99.
Hwang, P., Wu, X., and Jeon, Y., Repeated Brake Temperature Analysis of Ventilated Brake Disc on the Downhill Road: SAE Technical Paper No. 2008-01-2571, Warrendale, PA: SAE Int., 2008, pp. 1–8. https://doi.org/10.4271/2008-01-2571
Adamowicz, A. and Grzes, P., Influence of convective cooling on a disc brake temperature distribution during repetitive braking, Appl. Therm. Eng., 2011, vol. 31, nos. 14–15, pp. 2177–2185.
Kang, S.-S. and Cho, S.-K., Thermal deformation and stress analysis of disk brakes by finite element method, J. Mech. Sci. Technol., 2012, vol. 26, no. 7, pp. 2133–2137.
Manjunath, T.V. and Suresh, P.M., Structural and thermal analysis of rotor disc of disc brake, Int. J. Innovative Res. Sci., Eng. Technol., 2013, vol. 2, no. 12, pp. 7741–7749.
Adamowicz, A., Effect of convective cooling on temperature and thermal stresses in disk during repeated intermittent braking, J. Frict. Wear, 2016, vol. 37, no. 2, pp. 107–112.
Adamovich, A., Thermally stressed state of the disc during repeated braking, Fiz.-Khim. Mekh. Mater., 2016, vol. 51, no. 6, pp. 58–63.
Ginzburg, A.G., Romashko, A.M., and Titarenko, V.F., Calculation of the temperature regime of a disc rail brake, in Raschet i modelirovanie rezhima raboty tormoznykh i friktsionnykh ustroistv (Calculation and Modeling of Operation Mode of Breaking and Friction Devices), Moscow: Nauka, 1974, pp. 21–25.
Yevtushenko, A., Kuciej, M., Grzes, P., et al., Temperature in the railway disc brake at a repetitive short-term mode of braking, Int. Commun. Heat Mass Trans., 2017, vol. 84, pp. 163–173.
Slavchev, Y., Dimitrov, L., and Dimitrov, Y., Research on transient thermal process of a friction brake during repetitive cycles of operation, AIP Conf. Proc., 2017, vol. 1910, no. 1, art. ID 030003. https://doi.org/10.1063/1.5013962
Grzes, P., Maximum temperature of the disc during repeated braking applications, Adv. Mech. Eng., 2019, vol. 11, no. 3, pp. 1–13.
Yevtushenko, A. and Kuciej, M., A method to account for thermal sensitivity and friction heat resistance of materials in calculating disc brake temperature mode, J. Frict. Wear, 2020, vol. 41, no. 3, pp. 221–227.
Balakin, V. and Sergienko, V., Teplovye raschety tormozov i uzlov treniya (Thermal Calculations of Brakes and Frictional Assemblies), Gomel: Inst. Mekh. Metallopolim. Sist., Nats. Akad. Nauk Bel., 1999.
Mamkhegov, M.A., Determination of the maximum sliding contact temperature, Mashinostroenie, 1977, no. 1, pp. 107–112.
Yevtushenko, A., Kuciej, M., and Och, E., Theoretical nonlinear model of frictional heat generation in braking, Heat Trans. Res., 2019, vol. 50, no. 10, pp. 1007–1022.
Gear, C.W., Numerical Initial Value Problems in Ordinary Differential Equations, Englewood Cliffs, NJ: Prentice-Hall, 1971.
Topchevska, K., Influence of the duration of the higher contact pressure during braking on the temperature of the pad-disk tribosystem, Fiz.-Khim. Mekh. Mater., 2018, vol. 54, no. 2, pp. 107–114.
Funding
This work was financially supported by the National Science Center of Poland, project no. 2017/27/B/ST8/01249.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by S. Kuznetsov
About this article

Cite this article
Yevtushenko, A., Kuciej, M. Calculation of Friction Characteristics of Disc Brakes Used in Repetitive Short-Term Braking Mode. J. Frict. Wear 41, 509–516 (2020). https://doi.org/10.3103/S1068366620060069
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068366620060069