
Abstract
The present paper is aimed at studying the influence of gravity field on the general model of the generalized thermo-microstretch equations for a homogeneous isotropic elastic half-space solid. The problem is in the context of the Lord-Şhulman and Green-Lindsay theories, as well as the coupled theory. The Finite Element Method is used to obtain the exact expressions for the displacement components, force stresses, temperature, couple stresses and microstress distribution. The variations of the considered variables perpendicular to the axis of rotation are illustrated graphically using MATLAB software. Comparisons are made with the results in the presence and absence of gravity field of a particular case for the generalized micropolar thermoelasticity medium (without microstretch constants) between the three theories. The results obtained are agreement with the previous results obtained with neglecting the new external parameters that predict new results applicable and useful for the related topics as geophysics, biology, acoustics, …, etc.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 1 INTRODUCTION
In recent years, more attentions have been given to the interaction between the thermoelastic and microstretch, because of its utilitarian aspects and applications in diverse field as geoloy, geophysics, astronomy, physics, acoustic, and engineering. The linear theory of elasticity is of paramount importance in the stress analysis of steel, which is the commonest engineering structural material. To a lesser extent, the linear elasticity describes the mechanical behavior of the other common solid materials, e.g. concrete, wood and coal. However, the theory does not apply to the behavior of many of the newly synthetic materials of the elastomer and polymer type, e.g. polymethyl-methacrylate (Perspex), polyethylene and polyvinyl chloride. The linear theory of micropolar elasticity is adequate to represent the behavior of such materials. For ultrasonic waves i.e. in the case of elastic vibrations characterized by high frequencies and small wavelengths, the influence of the body microstructure becomes significant. This influence of microstructure results in the development of new types of waves, which are not in the classical theory of elasticity. Metals, polymers, composites, solids, rocks, concrete are typical media with microstructures. More generally, most of the natural and man-made materials including engineering, geological and biological media possess a microstructure. The effect of gravity in elastic media was studied by Bhattacharyya and De [1]; De and Sengupta, [2]. Thermoelastic and magneto-thermoelastic plane wave propagation in an infinite non-rotating medium was studied respectively by Agarwal, [3]. The gravitational effect along with the rotational effect on generalized thermoelastic and generalized thermoelastic medium with two temperature respectively, was studied by Ailawalia et al. [4]. Sethi and Gupta, [5] discussed the gravity effect in a thermo-viscoelastic media of higher order. These problems are based on the more realistic elastic model since earth; moon and other planets all have gravitational effect.
The theory of thermo-microstretch elastic solids was introduced by Eringen [6]. In the framework of the theory of thermo-microstretch solids Eringen established a uniqueness theorem for the mixed initial-boundary value problem. The theory was illustrated through the solution of one dimensional waves and comparing with lattice dynamical results. The asymptotic behavior of the solutions and an existence result were presented by Bofill and Quintanilla [7]. A reciprocal theorem and a representation of Galerkin type were presented by Cicco and Nappa [8]. Cicco and Nappa [9] extended the linear theory of thermo-microstretch elastic solids to permit the transmission of heat as thermal waves at finite speed. Iesau and Nappa [10] studied the problem of the plane strain of microstretch elastic solids. The basic results and an extensive review of the theory of thermo-microstretch elastic solids can be found in Eringen’s book [11].
The classical uncoupled theory of thermoelasticity predicts two phenomena not compatible with physical observation. First, the equation of heat conduction of this theory dose not contain any elastic terms contrary to the fact that elastic changes produce heat effects. Secondly, the heat equation is parabolic type predicting infinite speeds of propagation for heat waves.
Biot [12] introduced the theory of coupled thermoelasticity to overcome the first shortcoming. The governing equations for this theory are coupled, eliminating the first paradox of the classical theory. However, both theories share the second shortcoming since heat equation for the coupled theory is also parabolic.
Two generalizations to the coupled theory were introduced. The first is due to Lord and Shulman [13], who obtained a wave-type heat equation by postulating a new law of heat conduction to replace the classical Fourier’s law. This new law contains the heat flux vector as well as its time derivative. It also contains a new constant that acts as a relaxation time. Since the heat equation of this theory is of the wave type, it automatically ensures finite speeds of propagation for heat and elastic waves. The remaining governing equations for this theory, namely, the equations of motions and constitutive relations, remain the same as those for the coupled and the uncoupled theories. Othman [14] studied the dependence of the modulus of elasticity on the reference temperature in a two dimensional generalized thermoelasticity with one relaxation time. This theory was extended by Abbas and Othman [15] to study the plane waves in generalized thermo-microstretch elastic solid with thermal relaxation using finite element method. The second generalization to the coupled theory of thermoelasticity is what is known as the theory of thermoelasticity with two relaxation times or the theory of temperature-rate-dependent thermo-elasticity. Müller [16], in review of the thermo-dynamics of thermoelastic solids, proposed an entropy production inequality, with the help of which he considered restrictions on a class of constitutive equations.
A generalization of this inequality was proposed by Green and Laws [17]. In 1972 Green and Lindsay [18] developed the theory of generalized thermoelasticity with two relaxation times which is based on a generalized inequality of thermo-dynamics. This theory does not violate Fourier’s law of heat conduction when the body under consideration has a center of symmetry. In this theory both the equations of motion and of heat conduction are hyperbolic but the equation of motion is modified and differs from that of the coupled thermoelasticity theory. Othman et al. [19] studied the plane waves analysis through magneto-thermoelastic microstretch rotating medium with temperature dependent elastic properties. Datta [20] discussed the influence of gravity field on Rayleigh wave propagation in homogeneous elastic medium. On the other hand, Das et al. [21] discussed the influence of gravity on Rayleigh wave propagation in an inhomogeneous isotropic elastic solid medium. Zenkour [22] investigated the two-temperature generalized thermoelastic interaction in an infinite fiber-reinforced anisotropic plate containing a circular cavity with two relaxation times. A non-linear generalized thermoelasticity of temperature dependent materials or ramp-type heating using finite element method is discussed by Abbas and Yossef [23] and [24]. Abo-Dahab et al. [25] studied the effect of relaxation time and mode-I crack on the wave through the magneto-thermoelasticity medium with two temperatures.
Some new contributions about variable thermal conductivity, hyperbolic two-temperature theory during magneto-photothermal, semiconductor induced by laser pulses and other external parameters discussed in [28–32]. In [33–40], the interaction between the microstretch and elastic or thermoelastic with a new external parameters is discussed considering some new models about generalized thermoelasticity.
The purpose of the present paper is to obtain the normal displacement, the temperature, the normal force stress and the tangential couple stress in a microstretch elastic solid under magnetic field, gravitational effect and initial stress. The variations of the considered variables perpendicular to the axis of rotation are illustrated graphically using MATLAB software. A comparison of the temperature, the stresses and the displacements are carried out between three theories for the propagation of waves in a semi-infinite microstretch elastic solid for different cases. The finite element method was used to obtain the numerical solution for the physical quantities.
2 NOMENCLATURE
\({{c}_{1}}\,{\text{,}}\,{{c}_{2}}\) | are the parameters to heat conduction equation |
\({{C}_{{\text{E}}}}\) | is the specific heat per unit mass |
\(e\) | is the dilatation |
\({{e}_{{{\text{ij}}}}}\) | are the components of strain tensor |
g | is the earth gravity |
\(j\) | is the micro-inertia moment |
\(K\,{\text{(}} \geqslant 0{\text{) }}\) | is the thermal conductivity |
\(k{\text{,}}\,{\kern 1pt} \alpha {\text{,}}\,\beta {\text{,}}\,\gamma \) | are the micropolar constants |
\({{m}_{{{\text{ij}}}}}\) | is the couple stress tensor |
t | is the time |
T0 | is the initial temperature |
T | is the absolute temperature, \(\left| {\frac{{T - {{T}_{0}}}}{{{{T}_{0}}}}} \right| \ll 1\) |
u | is component of displacement vector |
\(\,{{\alpha }_{{\text{0}}}}{\text{,}}\,\,{{\lambda }_{0}}{\text{,}}\,{{\lambda }_{{\text{1}}}}\) | are the microstretch elastic constants |
α1, α2 | is the thermal expansion coefficients |
δ | is the Kronecker delta |
\({{\varepsilon }_{{{\text{ijr}}}}}\) | is the alternate tensor |
φ | is the rotation vector |
φ* | is the scalar microstretch |
\(\theta \) | is the ratio of the coefficients of heat transfer |
\(\lambda \), \(\mu \) | are the Lame’s constants |
\(\rho \) | is the density of the material |
\(\tau \) | is the function of the depth |
\({{\tau }_{{ij}}}\) | is the stress components |
τ1, τ2 | are the mechanical relaxation times |
ωij | is the rotation |
3 2 FORMULATION OF THE PROBLEM
We obtain the constitutive and the field equations for a linear isotropic generalized thermo-micro-stretch elastic solid in the absence of body forces. We use a rectangular coordinate system \((x,y,z)\) having origin on the surface y = 0 and z-axis pointing vertically into the medium. The surface of the half-space is subjected to a thermal shock which is a function of y and t. Thus, all the quantities considered will be functions of the time variable t and of the coordinates x and y. We begin our consideration with linearized equations of slowly moving medium to give
The basic governing equations of linear generalized thermoelasticity with gravity in the absence of body forces and heat sources are
where \(\hat {\gamma } = {\text{(3}}\lambda + {\text{2}}\mu + k{\text{)}}{{\alpha }_{{{{t}_{1}}}}}\), \({{\hat {\gamma }}_{1}} = {\text{(3}}\lambda + {\text{2}}\mu + k{\text{)}}{{\alpha }_{{{{t}_{2}}}}}\), \({{\nabla }^{2}} = \frac{{{{\partial }^{2}}}}{{\partial {\kern 1pt} {{x}^{2}}}} + \frac{{{{\partial }^{2}}}}{{\partial {\kern 1pt} {{z}^{2}}}}\).
The constants \(\hat {\gamma }\) and \({{\hat {\gamma }}_{1}}\) depend on the mechanical as well as the thermal properties of the body and the dot denote the partial derivative with respect to time, \({{\alpha }_{{{{t}_{1}}}}}\) and \({{\alpha }_{{{{t}_{2}}}}}\) are the coefficients of linear thermal expansions.
We study the above basic equations for the following three different theories
Theories | τ1 | τ2 | c1 | c2 | δ |
(i) Classical and Dynamical coupled theory (1956) (CD) | 0 | 0 | 1 | 1 | 0 |
(ii) Lord and Shulma’s theory (1967) (LS) | 0 | > 0 | 1 | 1 | 1 |
(iii) Green and Lindsay’s theory (1972) (GL) | > 0 | > 0 | 1 | 1 | 0 |
The state of plane strain parallel to the xz-plane is defined as follows
The constitutive relation can be written as:
For convenience, the following non-dimensional variables are used in the following form
Using Eq. (2.18), Eqs. (2.2)–(2.6) become (dropping the dashed for convenience)
where
Assuming the scalar and vector potential functions, respectively \(\varphi (x{\text{,}}z{\text{,}}t)\) and \(\psi (x{\text{,}}z{\text{,}}t)\) defined by the relations in the non-dimensional form
Using Eq. (2.25) into Eqs. (2.19)–(2.23), (2.12)–(2.17) and (2.9), we obtain
where
4 3 INITIAL AND BOUNDARY CONDITIONS
The above equations are solved assuming the following initial conditions
On the other hand, the boundary conditions for the problem may be taken as
where the Maxwell’s stress tensor τij is given by
which takes the form
5 4 FINITE ELEMENT METHOD (FEM)
In this section, the governing equations of generalized thermoelastic with relaxation times (Lord and Shulman theory) are summarized, followed by the corresponding finite element equations. In the finite element method, the displacement components u, w and temperature T are related to the corresponding nodal values by:
where m denotes the number of nodes per element, and Ni are the shape functions. The eight-node isoparametric, quadrilateral element is used for displacement components and temperature calculations. The weighting functions and the shape functions coincide. Thus
It should be noted that appropriate boundary conditions associated with the governing equations must be adopted in order to properly formulate a problem. Essential conditions are prescribed displacements u, w, temperature T micro-rotation ϕ and microstretch ϕ* while, the natural boundary conditions are prescribed tractions, heat flux, and mass flux which are expressed as
where \({{n}_{x}}\) and \({{n}_{z}}\) are direction cosines of the outward unit normal vector at the boundary, \({{\bar {\tau }}_{x}},\,\,{{\bar {\tau }}_{z}}\) are the given tractions values, \(\bar {q}\) is the given surface heat flux, \(\bar {m}\) and \(\bar {\lambda }\) are the given couple traction and microstress component respectively. In the absence of body force, the governing equations are multiplied by weighting functions and then are integrated over the spatial domain Ω with the boundary \({{\Gamma }}{\text{.}}\) Applying integration by parts and making use of the divergence theorem reduce the order of the spatial derivatives and allows for the application of the boundary conditions. A shape function is written for each individual node of a finite element and has the property that its magnitude is 1 at that node and 0 for all other nodes in that element. We assume that the master element has its local coordinates in the range [–1, 1]. In our case, the two-dimensional quadrilateral elements are used, which is given by:
Linear shape functions
Quadratic shape functions
On the other hand, the time derivatives of the unknown variables have to be determined by New mark time integration method or other methods (Wriggers [26]).
6 5 NUMERICAL RESULTS AND DISCUSSION
With the view of illustrating the theoretical results obtained in the preceding sections and concerned with Lord-Shulman theory, we present some numerical results. The material chosen for this purpose is magnesium crystal (a microstretch thermoelastic solid). The micropolar parameters are the following [27], [33]
The thermal characteristics were taken from are as follows
The stretch parameters from
The diagrammatic of the displacements components, temperature, micro-rotation, microstretch, stresses components, distribution of mxz and λx with different values of the earth gravity with respect to the x-axis is shown in Figs. 1–10.

The distribution of displacement u for different values of g.

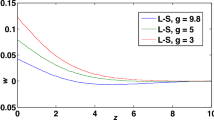
The distribution of displacement w for different values of g.

The distribution of temperature T for different values of g.

The distribution of micro-rotation ϕ for different values of g.

The distribution of microstretch ϕ* for different values of g.

The distribution of stress σxx for different values of g.

The distribution of stress σxz for different values of g.

The distribution of stress σzz for different values of g.

The distribution of mxy for different values of g.

The distribution of micro-stress λx for different values of g.
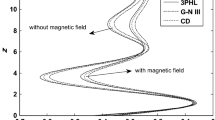
From Fig. 1, it appears that the distribution of displacement u increases to its maximum value and return arriving to the unity with the increased values of the x-axis; also, it decreases with an increasing of the gravity. From Fig. 2, it is concluded that the displacement component w decreases tending to zero as xtends to infinity. And decreasing also with an increasing of the earth gravity for small values of xaxis and for the large values, there is a slight increase of w with variation of g. With the variation of the gravity, it is seen from Fig. 3 that the distribution of the temperature T has a slight increase change with an increasing of the gravity, and start from unity at x = 0 arriving to zero as xtends to infinity that satisfy the boundary condition for the temperature distribution. From Fig. 4, it is obvious that the distribution of micro-rotation ϕ doesn’t affect strongly by the difference values of the gravity but increases arriving to zero as x tends to infinity. Figure 5 shows that the microstretch ϕ* affects negatively strongly by increasing of g and tends to zero as x tends to infinity. From Fig. 6, it is appear that the normal stress σxx decreases with the small values of x-axis and then increases arriving to zero with the large values of it and has small variation with an increasing of the gravity g. From Fig. 7, it is obvious that the shear stress σxzstarts nearly from zero, decreases with the increased values of x-axis returning to zero with the large values of it and has good variation increasingly at x nearly equal [0, 0.19] and after that decreases with an increasing of the gravity g. Figure 8 clears that the normal stress σzz decreases and increases with the small values of x-axis arriving to zero if xtends to infinity and has strongly variation with an increasing of the gravity g for the small values of x and then match for the large values of x. From Fig. 9, it is observed that mxz starts nearly from zero, decreases with the increased values of x-axis returning to zero with the large values of it and has good variation increasingly at x nearly equal [0, 0.1] and after that decreases with an increasing of the gravity g. Finally, from Fig. 10, one can see that λx increases with an increasing of x and has a slight change with the variation of the gravity g.
Physically, the results obtained are agreement with the previous results obtained with neglecting the new external parameters that predict new results applicable and useful for the related topics as geophysics, biology, acoustics, …, etc.
7 6 CONCLUSIONS
The effect of all parameters, especially gravity has been expressed theoretically and graphically in this study and the results obtained can be summarized in the following remarks:
1. The curves in LS theory decrease exponentially with the increasing x, which indicates that the thermoelastic waves are unattended and non-dispersive, while purely thermoelastic waves undergo both attenuation and dispersion.
2. The presence of the microstretch plays a significant role in all the physical quantities.
3. The solutions based upon finite element method of the thermoelasticity problem in solids have been developed and utilized.
4. The values of all the physical quantities converge to zero with an increase in the distance x and all functions are continuous.
5. The presence of gravity plays a significant role in all the physical quantities.
REFERENCES
S. Bhattacharyya and S. N. De, “Surface waves in viscoelastic media under the influence of gravity,” Aust. J. Phys. 30 (3), 347–353 (1977). https://doi.org/10.1071/PH770347
S. N. De and P. R. Sengupta, “Plane influence of gravity on wave propagation in elastic layer,” J. Acoust. Soc. Am. 55, 919-921 (1974).
V. K. Agarwal, “On electromagneto-thermoelastic plane waves,” Acta Mech. 34, 181–191 (1979). https://doi.org/10.1007/BF01227983
P. Ailawalia, G. Khurana, and S. Kumar, “Effect of rotation in a generalized thermoelastic medium with two temperature under the influence of gravity,” Int. J. Appl. Math. Mech. 5 (5), 99–116 (2009).
M. Sethi and K. C. Gupta, “Surface waves in non-homogeneous, general thermos visco-elastic media of higher order under influence of gravity and couple-stress,” Int. J. Appl. Math. Mech. 7, 1–20 (2011).
A. C. Eringen, “Theory of thermo-microstretch elastic solids,” Int. J. Eng. Sci. 28 (12), 1291–1301 (1990). https://doi.org/10.1016/0020-7225(90)90076-U
F. Bofill and R. Quintanilla, “Some qualitative results for the linear theory of thermo-microstretch elastic solids,” Int. J. Eng. Sci. 33 (14), 2115–2125 (1995). https://doi.org/10.1016/0020-7225(95)00048-3
S. De Cicco and L. Nappa, “On the theory of thermo-microstretch elastic solids,” J. Therm. Stress. 22 (6), 565–580 (1999). https://doi.org/10.1080/014957399280751
S. De Cicco and L. Nappa, “Some results in the linear theory of thermo-micro-stretch elastic solids,” J. Math. Mech. 5 (4), 467–482 (2000). https://doi.org/10.1177/108128650000500405
D. Ieşan and L. Nappa, “On the plane strain of microstretch elastic solids,” Int. J. Eng. Sci. 39 (16), 1815–1835 (2001). https://doi.org/10.1016/S0020-7225(01)00017-9
A. C. Eringen, Micro-Continuum Field Theories: I. Foundation and Solids (Springer, New York, 1999).
M. Biot, “Thermoelasticity and irreversible thermodynamics,” J. Appl. Phys. 27, 240–253 (1956). https://doi.org/10.1063/1.1722351
H. Lord and Y. Shulman, “A generalized dynamical theory of thermoelasticity,” J. Mech. Phys. Solids 15 (5), 299–309 (1967). https://doi.org/10.1016/0022-5096(67)90024-5
M. I. A. Othman, “Lord-Shulman theory under the dependence of the modulus of elasticity on the reference temperature in two-dimensional generalized thermo- elasticity,” J. Therm. Stress. 25 (11), 1027–1045 (2002). https://doi.org/10.1080/01495730290074621
I. A. Abbas and M. I. A. Othman, “Plane waves in generalized thermo-micro- stretch elastic solid with thermal relaxation using finite element method,” Int. J. Thermophys. 33 (12), 2407–2423 (2012). https://doi.org/10.1007/s10765-012-1340-8
I. Müller, “The Coldness, a universal function in thermoelastic bodies,” Arch. Rat. Mech. Anal. 41, 319–332 (1971). https://doi.org/10.1007/BF00281870
A. E. Green and N. Laws, “On the entropy production inequality,” Arch. Rat. Mech. Anal. 45, 45–47 (1972). https://doi.org/10.1007/BF00253395
A. E. Green and K. A. Lindsay, “Thermoelasticity,” J. Elasticity 2, 1–7 (1972).
M. I. A. Othman, A. Khan, R. Jahangir, and A. Jahangir, “Analysis on plane waves through magneto-thermoelastic microstretch rotating medium with temperature dependent elastic properties,” Appl. Math. Model. 65, 535–548 (2019). https://doi.org/10.1016/j.apm.2018.08.032
B. K. Datta, “Some observation on interactions of Rayleigh waves in an elastic solid medium with the gravity field,” Roman. J. Techn. Sci. Appl. Mech. 31 (4), 369–374 (1986).
S. C. Das, D.P. Acharya, and P. R. Sengupta, “Surface waves in an inhomogeneous elastic medium under the influence of gravity,” Roman. J. Techn. Sci. Appl. Mech. 37 (5), 539–552 (1992).
A. M. Zenkour, “Two-temperature generalized thermoelastic interaction in an infinite fiber-reinforced anisotropic plate containing a circular cavity with two relaxation times,” J. Comput. Theor. Nanosci. 11 (1), 1–7 (2014). https://doi.org/10.1166/jctn.2014.3309
I. A. Abbas and H. M. Yossef, “A non-linear generalized thermoelasticity of temperature dependent materials using finite element method,” Int. J. Thermophys. 33 (7), 1302–1312 (2012). https://doi.org/10.1007/s10765-012-1272-3
I. A. Abbas and H. M. Yossef, “Two-temperature generalized thermoelasticity under ramp-type heating by finite element method,” Meccanica 48 (2), 331–339 (2013). https://doi.org/10.1007/s11012-012-9604-8
S. M. Abo-Dahab, Kh. Lotfy, M. E. Gabr, et al., “Study on the effect of relaxation time and mode-I crack on the wave through the magneto-thermoelasticity medium with two temperatures,” Mech. Solids 58 (5), 1–17 (2023). https://doi.org/10.3103/S0025654423600708
P. Wriggers, Nonlinear Finite Element Methods (Springer, Berlin Heidelberg, 2008).
M. I. A. Othman and B. Singh, “The effect of rotation on generalized micropolar thermoelasticity for a half-space under five theories,” Int. J. Solids Struct. 44, 2748–2762 (2007). https://doi.org/10.1016/j.ijsolstr.2006.08.016
A. M. S. Mahdy, Kh. Lotfy, A. El-Bary, and I. M. Tayel, “Variable thermal conductivity and hyperbolic two-temperature theory during magneto-photothermal theory of semiconductor induced by laser pulses,” Eur. Phys. J. Plus. 136 (6), 651, (2021). https://doi.org/10.1140/epjp/s13360-021-01633-3
M. Yasein, N. Mabrouk, Kh. Lotfy, and A.A. EL-Bary, “The influence of variable thermal conductivity of semiconductor elastic medium during photothermal excitation subjected to thermal ramp type,” Results Phys. 15, 102766 (2019). https://doi.org/10.1016/j.rinp.2019.102766
Kh. Lotfy and R. S. Tantawi, “Photo-thermal-elastic interaction in a functionally graded material (FGM) and magnetic field,” Silicon 12 (2), 295–303 (2020).https://doi.org/10.1007/s12633-019-00125-5
Kh. Lotfy, A. A. El-Bary, and R. S. Tantawi, “Effects of variable thermal conductivity of a small semiconductor cavity through the fractional order heat-magneto-photothermal theory,” Eur. Phys. J. Plus. 134 (6), 280 (2019). https://doi.org/10.1140/epjp/i2019-12631-1
Kh. Lotfy, E. S. Elidy, and R. S. Tantawi, “Piezo-photo-thermoelasticity transport process for hyperbolic two-temperature theory of semiconductor material,” Int. J. Modern Phys. C 32 (7), 2150088 (2021). https://doi.org/10.1142/S0129183121500881
M. I. A. Othman, I. A. Abbas, and S. M. Abo-Dahab, “Generalized magneto-thermo-microstretch elastic solid with finite element method under the effect of gravity via different theories,” Geomech. Eng. 27 (1), 45–54 (2021). https://doi.org/10.12989/gae.2021.27.1.000
S. M. Abo-Dahab, A. Kumar, and P. Ailawalia, “Mechanical changes due to pulse heating in a microstretch thermoelastic half-space with two-temperatures,” J. Appl. Sci. Eng. 23 (1), 153–161 (2020). https://doi.org/10.6180/jase.202003_23(1).0016
S. M. Abo-Dahab, A. Jahangir, and A. N. Abd-Alla, “Reflection of plane waves in thermoelastic microstructured materials under the influence of gravitation,” Contin. Mech. Thermody. 32, 803–815 (2020). https://doi.org/10.1007/s00161-018-0739-2
S. M. Abo-Dahab and A. E. Abouelregal, “On a two-dimensional problem in thermoelasticity half-space with microstructure subjected to a uniform thermal shock,” Phys. Wave Phen. 27 (1), 56–66 (2019). https://doi.org/10.3103/S1541308X19010102
A. Kumar, S. M. Abo-Dahab, and P. Ailawalia, “Mathematical study of Rayleigh waves in peizoelectric microstretch thermoelastic medium,” Mech. Mech. Eng. 23, 86–93 (2019). https://doi.org/10.2478/mme-2019-0012
S. M. Abo-Dahab, A. M. Abd-Alla, M. Elsagheer, and A. A. Kilany, “Effect of rotation and gravity on the reflection of P-waves from thermo-magneto-micro-stretch medium in the context of three phase lag model with initial stress,” Microsyst. Technol. 24, 3357–3369 (2018). https://doi.org/10.1007/s00542-017-3697-x
A. Kumar1, R. Kumar, and S. M. Abo-Dahab, “Mathematical model for Rayleigh waves in microstretch thermoelastic medium with microtemperatures,” J. Appl. Sci. and Eng. 20 (2), 149–156 (2017). https://doi.org/10.6180/jase.2017.20.2.02
M. I. A. Othman, S. M. Abo-Dahab, and Kh. Lotfy, “Gravitational effect and initial stress on generalized magneto-thermo-microstretch elastic solid for different theories,” Appl. Math. Comput. 230, 597–615 (2014). https://doi.org/10.1016/j.amc.2013.12.148
Funding
The authors declare that there is no conflict of interest between them.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
The authors declare that they have no conflicts of interest.
Additional information
Publisher’s Note.
Allerton Press remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Abo-Dahab, S.M., Abbas, I.A. & Othman, M.I. Generalized Thermo-Microstretch Elastic Solid for Different Theories with Finite Element Method under the Influence of Gravity Field. Mech. Solids 58, 3346–3359 (2023). https://doi.org/10.3103/S0025654423601489
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S0025654423601489