
Abstract
In this paper the linear theory of the thermoelasticity has been employed to study the effect the reflection of plane harmonic waves from a semi-infinite elastic solid under the effect of the magnetic field , rotation, initial stress and gravity. The medium under consideration is traction free, homogeneous, isotropic, as well as with three-phase-lag. The normal mode analysis is used to solve the resulting non-dimensional coupled equations. The expressions for the reflection coefficients, which are the relations of the amplitudes of the reflected waves to the amplitude of the incident waves, are obtained similarly, the reflection coefficient ratio variations with the angle of incident under different conditions are shown graphically. Comparisons are made with the results predicted by different theories Lord-Shulman theory (L-S), the Green-Naghdi theory of type III (G-N III) and the three-phase-lag model in the absence and presence of a magnetic field, rotation, initial stress and gravity. The results indicate that the effect of rotation, magnetic field, initial stress and gravity field are very pronounced.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent decades, the influences of magnetic field, thermal field have too pronounced in diverse fields, especially, Engineering, Geophysics, Geology, Acoustics, Plasma and Physics because of its utilitarian aspects in these fields. The generalized theories of thermoelasticity, which admit the finite speed of a thermal signal, have been the center of interest of active research. Othman and Song (2008) studied the reflection of magneto-thermoelastic waves with two relaxation times and temperature dependent elastic module. Abo-Dahab and Biswas (2017) investigated the effect of rotation on Rayleigh waves in magneto-thermoelastic transversely isotropic medium with thermal relaxation times. Said (2016a) discussed the two-temperature generalized magneto-thermoelastic medium for dual-phase-lag model under the effect of the gravity field and hydrostatic initial stress. Xiong and Guo (2016) investigated the effect of variable properties and moving heat Source on magnetothermoelastic Problem under fractional order thermoelasticity. Othman et al. (2010) investigated the generalized thermo-microstretch elastic medium with temperature dependent properties for the different theories. Chakraborty and Singh (2011a) studied the reflection and refraction of a plane thermoelastic wave at a solid–solid interface under perfect boundary condition, in the presence of normal initial stress. Singh (2008) studied the effect of hydrostatic initial stresses on waves in a thermoelastic solid half-space. Abo-Dahab et al. (2017) investigated a two-dimensional problem with rotation and magnetic field in the context of four thermoelastic theories. Kumar and Kaur (2014) investigated the reflection and refraction of plane waves at the interface of an elastic solid and microstretch thermoelastic solid with microtemperatures. Elsagheer and Abo-Dahab (2016) studied the reflection of thermoelastic waves from insulated boundary fibre-reinforced half-space under the influence of rotation and magnetic field. Abo-Dahab and Abd-Alla (2016) investigated the Green Lindsay model on reflection and refraction of p- and SV-waves at the interface between solid and liquid media presence in a magnetic field and initial stress. The extensive literature on the topic is now available and we can only mention a few recent interesting investigations in Abd-Alla et al. (2016a, b, 2017a, b, c), Ailawalia and Narah (2009), Lykotrafitis et al. (2001), Chakraborty and Singh (2011b) and Said (2015, 2016b).
The objective of the present investigation is to determine the reflection of P-waves from thermo-magneto-microstretch medium in the context of three phase lag model under the effect of rotation and gravity with initial stress. The reflection coefficient ratios of various reflected waves with the angle of incidence have been obtained from (3PHL) model and LS theory. Also the effect of the magnetic field and gravity is discussed numerically and illustrated graphically. The physical quantities are obtained and tested by a numerical study using the parameters of Cu as a target and presented graphically. The distribution of these quantities is represented graphically in the presence and absence of magnetic and gravity field.
2 Formulation of the problem
The equations of generalized thermo-micro-stretch in a rectangular coordinate system \(\text{(}x,\,y,\,z\text{)}\) with z-axis directed in the media are used. Constant magnetic field intensity \(\varvec{H} = ( 0 ,\,H_{0} ,\,0 )\) is taken as the direction of the y-axis. We begin our consideration with linearized equations of electro-dynamics of slowly moving media (Xiong and Guo 2016)
The constitutive equation in the presence of gravitational and magnetic field (Othman and Song 2008)
where, \({\varvec{\Omega}} \times {\varvec{\Omega}} \times \varvec{u}\) is the centripetal acceleration due to the time varying motion only and \(2{\varvec{\Omega}} \times \dot{\varvec{u}}\) is the Coriolis acceleration.
From the above equations, we can obtain
From Eqs. (6) and (9), we obtain
So the displacement vector \(\varvec{u}\) has the components \(u_{x} = u(x,z,t),\quad u_{y} = 0,\quad u_{z} = w(x,z,t).\)
where, \(\hat{\gamma } = (3\lambda + 2\mu + k)\alpha_{{t_{1} }} ,\quad \hat{\gamma }_{1} = (3\lambda + 2\mu + k)\alpha_{{t_{2} }} ,\quad \omega_{ij} = \frac{1}{2}(u_{j,i} - u_{i,j} )\), \(T\) is the temperature above the reference temperature \(T_{0}\), \(\lambda ,\;\,\mu\) and \(t\) are the Lame’ constants and time, \(u_{i} ,\sigma_{ij} ,\;e_{ij} ,\;m_{ij} ,\;P\) are the components of the displacement vector, of the stress tensor, strain tensor, couple stress tensor and the initial stress, respectively, \(j\) is the micro inertia moment, \(k,\,\alpha ,\,\beta ,\gamma\) and \(\alpha_{0} ,\,\,\lambda_{0} ,\,\,\lambda_{1}\) are the micropolar and microstretch constants, respectively, \(\varphi^{*}\) is the scalar microstretch, \(\varvec{\varphi }\) is the rotation vector and \(\,\rho .\) is the mass density
The constitutive relation can be written as
In component form the basic governing equations become,
Such that \(\tau_{\nu }^{*} = K + K^{*} \tau_{\nu } ,\quad \nabla^{2} = \frac{{\partial^{2} }}{{\partial {\kern 1pt} x^{2} }} + \frac{{\partial^{2} }}{{\partial z^{2} }}.\)
To facilitate the solution, the following non-dimensions, quantities are introduced
Using Eq. (22) the governing Eqs. (17–21) recast in the following form (after suppressing the primes)
where
The displacement components \(u(x,z,t)\) and \(w(x,z,t)\) may be written in terms of potential functions \(\varPhi (x,z,t)\) and \(\varPsi (x,z,t)\) as
Using Eq. (30) in Eqs. (23–27), we obtain
where
3 Solution of the problem
We assume now the solution of Eqs. (31–34) takes the following form
where \(\xi\) is the wave number, \(\omega\) is the complex frequency and \(v = \frac{\omega }{\xi }\) is the velocity of the coupled waves.
Substitute from Eq. (36) into Eqs. (31–34), we get
where, \(\tau_{q}^{*} = 1 - \iota \tau_{q} \omega - \frac{{\tau_{q}^{2} \omega^{2} }}{2}\).
To find the nontrivial solution, it must Substitute from Eq. (36) into Eqs. (37–41), we get
which tends to
The coefficients \(A,\,B,\,C,\,D,\,E\,\) and \(E\) of Eq. (43) has been shown in “Appendix”.
From Eqs. (43) there are five waves with five different velocities Then \(\varPhi ,\varPsi ,\varTheta ,\varphi^{*} ,\varphi_{2}\) will take the following forms:
From Eqs. (38) and (39) we get
Also, from Eqs. (40) and (41) we get
4 The boundary conditions
The boundary conditions for the problem be taken as
Finally,
5 Numerical results and discussion
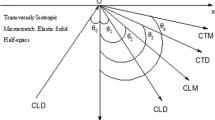
With the view of illustrating results obtain in the preceding sections and comparing these in various cases, we now study some numerical results. The materials chosen for this purpose are (Fig. 1)

Geometry of the problem
Figure 2 shows the variation of the amplitudes \(\left| {z_{1} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of gravity \(g\) and rotation \(\varOmega\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is notice that the amplitudes of P-wave increases with increasing of gravity field in the absence of rotation, while it decreases with increasing of gravity in the presence of rotation, while it equal zero at \(\theta = 90^{0}\).

Variation of the amplitudes \(\left| {Z_{1} } \right|\) with the angle of incidence of P-waves for variation of gravity: \(g = 3,\,4\), \(\varOmega = 0\,\_\_\_\_,\,\,\,\varOmega = 0.1\, - - -\)
Figure 3 shows the variation of amplitudes \(\left| {z_{2} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of gravity \(g\) and rotation \(\varOmega\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is obvious that the amplitudes of P-wave decreases with increasing of the gravity field in the absence or presence of rotation, while it equal zero at \(\theta = 90^{0}\).

Variation of the amplitudes \(\left| {Z_{2} } \right|\) with the angle of incidence of P-waves for variation of gravity: \(g = 3,\,4\), \(\varOmega = 0\,\_\_\_\_,\,\,\,\varOmega = 0.1\, - - -\)
Figure 4 shows the variation of amplitudes \(\left| {z_{3} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of gravity \(g\) and rotation \(\varOmega\), which it decreases with increasing of angle \(\theta .\) It is obvious that the amplitudes of P-wave decreases with increasing of the gravity field in the absence or presence of rotation, while it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{3} } \right|\) with the angle of incidence of P-waves for variation of gravity: \(g = 3,\,4\), \(\varOmega = 0\,\_\_\_\_,\,\,\,\varOmega = 0.1\, - - -\)
Figure 5 shows the variation of amplitudes \(\left| {z_{4} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of gravity \(g\) and rotation \(\varOmega\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is obvious that the amplitudes of P-wave decreases with increasing of the gravity field in the absence of rotation, while it increases with increasing of gravity in the presence of rotation, as well it equal zero at θ = 90°.

Variation of the amplitudes \(\left| {Z_{4} } \right|\) with the angle of incidence of P-waves for variation of gravity: \(g = 3,\,4\), \(\varOmega = 0\,\_\_\_\_,\,\,\,\varOmega = 0.1\, - - -\)
Figure 6 shows the variation of amplitudes \(\left| {z_{5} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for different values of gravity \(g\) and rotation \(\varOmega\), which it decreases with increasing of angle \(\theta .\) It is obvious that the amplitudes of P-wave decreases with increasing of the gravity field in the absence of rotation, while it increases with increasing of gravity in the presence of rotation, as well it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{5} } \right|\) with the angle of incidence of P-waves for variation of gravity: \(g = 3,\,4\), \(\varOmega = 0\,\_\_\_\_,\,\,\,\varOmega = 0.1\, - - -\)
Figures 7 and 8 show the variation of amplitudes \(\left| {z_{1} } \right|,\,\left| {z_{2} } \right|,\,\left| {z_{3} } \right|,\,\left| {z_{4} } \right|\) and \(\left| {z_{5} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves in the presence of the gravity field \(g\), which it has oscillatory behavior in the whole range of angle \(\theta .\) while it decreases with increasing of angle \(\theta .\) It is obvious that the amplitude \(\left| {z_{1} } \right|\) greater than the amplitude \(\left| {z_{2} } \right|\) greater than \(\left| {z_{4} } \right|\), while the dispersion curve for the amplitudes \(\left| {z_{3} } \right|\) and \(\left| {z_{5} } \right|\) of P-wave, as well it equal zero at θ = 90 except the amplitude \(\left| {z_{1} } \right|\)\(\ne 0\) at θ = 90.

Variation of the amplitudes \(\left| {Z_{i} } \right|\,(i = 1,\,2, \ldots ,5)\) with the angle of incidence of P-waves

3D variation of the amplitudes \(\left| {Z_{i} } \right|\,(i = 1,\,2, \ldots ,5)\) respect to the angle of incidence and gravity g of P-waves
Figure 9 shows the variation of amplitude \(\left| {z_{1} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of magnetic field \(H_{0}\) and initial stress \(P\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is obvious that the amplitude of P-wave decreases with increasing of magnetic field in the absence and presence of initial stress, while it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{1} } \right|\) with the angle of incidence of P-waves for variation of magnetic field: \(H_{0} = (1,\,1.5) \times 10^{3}\), \(P = 0\,\_\_\_\_,\,\,\,P = 10^{2} \, - - -\)
Figure 10 shows the variation of amplitude \(\left| {z_{2} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of magnetic field \(H_{0}\) and initial stress \(P\), which it has oscillatory behavior in the whole range of angle \(\theta\) in the absence and presence of initial stress, while it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{2} } \right|\) with the angle of incidence of P-waves for variation of magnetic field: \(H_{0} = (1,\,1.5) \times 10^{3}\), \(P = 0\,\_\_\_\_,\,\,\,P = 10^{2} \, - - -\)
Figure 11 shows the variation of amplitude \(\left| {z_{3} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of magnetic field \(H_{0}\) and initial stress \(P\), which it decreases with increasing of the angle of incidence \(\theta .\) It is obvious that the amplitude of P-wave decreases with increasing of magnetic field in the absence of initial stress, while the dispersion curve for the amplitudes \(\left| {z_{3} } \right|\) in the presence of initial stress, as well it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{3} } \right|\) with the angle of incidence of P-waves for variation of magnetic field: \(H_{0} = (1,\,1.5) \times 10^{3}\), \(P = 0\,\_\_\_\_,\,\,\,P = 10^{2} \, - - -\)
Figure 12 displays the variation of amplitude \(\left| {z_{4} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of magnetic field \(H_{0}\) and initial stress \(P\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is obvious that the dispersion curve for the amplitudes of P-wave in the absence and presence of initial stress, while it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{4} } \right|\) with the angle of incidence of P-waves for variation of magnetic field: \(H_{0} = (1,\,1.5) \times 10^{3} , \ldots\), \(P = 0\,\_\_\_\_,\,\,\,P = 10^{2} \, - - -\)
Figure 13 shows the variation of amplitude \(\left| {z_{5} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves for the different values of magnetic field \(H_{0}\) and initial stress \(P\), which it decreases with increasing of angle \(\theta .\) It is obvious that the amplitude of P-wave decreases with increasing of magnetic field in the absence and presence of initial stress, while it equal zero at θ = 90.

Variation of the amplitudes \(\left| {Z_{5} } \right|\) with the angle of incidence of P-waves for variation of magnetic field: \(H_{0} = (1,\,1.5) \times 10^{3}\), \(P = 0\,\_\_\_\_,\,\,\,P = 10^{2} \, - - -\)
Figure 14 clears the variation of amplitudes \(\left| {z_{1} } \right|,\,\left| {z_{2} } \right|,\,\left| {z_{3} } \right|,\,\left| {z_{4} } \right|\) and \(\left| {z_{5} } \right|\) with respect to the angle of incidence \(\theta\) of P-waves in the presence of magnetic field \(H_{0}\), which it has oscillatory behavior in the whole range of angle \(\theta .\) It is obvious that the amplitude \(\left| {z_{1} } \right|\) greater than the amplitude \(\left| {z_{2} } \right|\) greater than \(\left| {z_{4} } \right|\), while the dispersion curve for the amplitudes \(\left| {z_{3} } \right|\) and \(\left| {z_{5} } \right|\) of P-wave, as well it equal zero at \(\theta = 90^{0}\) except the amplitude \(\left| {z_{1} } \right|\)\(\ne 0\) at θ = 90.

3D variation of the amplitudes \(\left| {Z_{i} } \right|(i = 1,2, \ldots ,5)\) respect to the angle of incidence and magnetic field H0 of P-waves
6 Conclusions
We model On Maxwell’s stresses and rotation effects, initial stress and gravity field of reflection of P-waves from thermo-magneto-microstretch medium in the context of three phase lag model. The reflected of P-waves with the magnetic field, initial stress, gravity field, the rotation and the amplitude of the reflected of P-waves with the angle of incidence are obtained in the framework of dynamical coupling theory. The effects of applied magnetic field, initial stress, gravity field and rotation are discussed numerically and illustrated graphically.
The following conclusions can be made:
-
1.
The reflected of P-waves and amplitude of the reflected p-waves depend on the angle of incidence, rotation, initial stress, gravity field and magnetic field, the nature of this dependence is different for different reflected of P-waves.
-
2.
The rotation, initial stress, gravity field and magnetic field play a significant role and the effects have the inverse trend for the reflected of P-waves and amplitude of the reflected of P-waves.
-
3.
The rotation, initial stress, gravity field and magnetic field have a strong effect on the reflected of P-waves and amplitude of the reflected of P-waves.
-
4.
The result provides a motivation to investigate reflection of P-waves from thermo-magneto-microstretch materials as a new class of applicable thermoelectric solids. The results presented in this paper should prove useful for researchers in material science, designers of new materials, microsystem technologies, physicists as well as for those working on the development of thermo-magneto-microstretch and in practical situations as in geophysics, optics, acoustics, geomagnetic and oil prospecting etc. The used methods in the present article is applicable to a wide range of problems in thermodynamics and thermoelasticity.
It is observed that the amplitudes of reflected of P-waves changes in the presence of rotation, initial stress, gravity field and magnetic field. Hence, the presence of rotation, initial stress, gravity field and magnetic field are significantly effect on the reflection phenomena.
References
Abd-Alla AM, Othman MIA, Abo-Dahab SM (2016a) Reflection of plane waves from electro-magneto-thermoelastic half-space with a dual-phase. CMC-Comp Mater Cont 51:63–79
Abd-Alla AM, Abo-Dahab SM, Kilany AA (2016b) SV-waves incidence at interface between solid–liquid media under electromagnetic field and initial stress in the context of the thermoelastic theories. J Therm Stress 39:960–976
Abd-Alla AM, Abo-Dahab SM, Alotabi Hind A (2017a) On the influence of thermal stress and magnetic field in thermoelastic half-space without energy dissipation. J Therm Stress 40:213–230
Abd-Alla AM, Abo-Dahab SM, Khan Aftab (2017b) Rotational effect of thermoelastic Stoneley, Love and Rayleigh waves in fibre-reinforced anisotropic general viscoelastic media of higher order. Struct Eng Mech 61:221–230
Abd-Alla AM, Abo-Dahab SM, Alotabi Hind A (2017c) Propagation of a thermoelastic wave in a half-space of a homogeneous isotropic material subjected to the effect of gravity field. Arch Civil Mech Eng 17:564–573
Abo-Dahab SM, Abd-Alla AM (2016) Green Lindsay model on reflection and refraction of p- and SV-waves at interface between solid–liquid media presence in magnetic field and initial stress. J Vib Cont 22(12):3426–3438
Abo-Dahab SM, Biswas S (2017) Effect of rotation on Rayleigh waves in magneto-thermoelastic transversely isotropic medium with thermal relaxation times. J Electromagn Waves Appl 31(15):1485–1507
Abo-Dahab SM, Abd-Alla AM, Alqarni AJ (2017) A two-dimensional problem with rotation and magnetic field in the context of four thermoelastic theories. Results Phys 7:2742–2751
Ailawalia P, Narah NS (2009) Effect of rotation in generalized thermoelastic solid under the influence of gravity with an overlying infinite thermoelastic fluid. Appl Math Mech 30:1505–1518
Chakraborty N, Singh MC (2011a) Reflection and refraction of a plane thermoelastic wave at a solid–solid interface under perfect boundary condition, in presence of normal initial stress. Appl Math Model 35(11):5286–5301
Chakraborty N, Singh MC (2011b) Reflection and refraction of a plane thermoelastic plane wave at a solid–solid Interface under perfect boundary condition, in presence of normal initial stress. Appl Math Model 35:5286–5301
Elsagheer M, Abo-Dahab SM (2016) Reflection of thermoelastic waves from insulated boundary fibre-reinforced half-space under influence of rotation and magnetic field. Appl Math Inf Sci 10(3):1129–1140
Kumar R, Kaur M (2014) Reflection and refraction of plane waves at the interface of an elastic solid and microstretch thermoelastic solid with microtemperatures. Arch Appl Mech 84(4):571–590
Lykotrafitis G, Georgiadis HG, Brock LM (2001) Three-dimensional thermoelastic wave motions in a half-space under the action of a buried source. Int J Solid Struct 38:4857–4878
Othman MIA, Song YQ (2008) Reflection of magneto-thermoelastic waves with two relaxation times and temperature dependent elastic moduli. Appl Math Model 32(4):483–500
Othman MIA, Lotfy Kh, Farouk RM (2010) Generalized thermomicrostretch elastic medium with temperature dependent properties for different theories. Eng Anal Bound Elem 34(3):229–237
Said SM (2015) Deformation of a rotating two-temperature generalized magneto-thermo-elastic medium with internal heat source due to hydrostatic initial stress. Meccanica 50:115–123
Said SM (2016a) Two-temperature generalized magneto-thermoelastic medium for dual-phase-lag model under the effect of gravity field and hydrostatic initial stress. Multidiscip Model Mater Struct 12(2):362–383
Said SM (2016b) Influence of gravity on generalized magneto-thermoelastic medium for three-phase-lag model. J Comput Appl Math 291:50–68
Singh B (2008) Effect of hydrostatic initial stresses on waves in a thermoelastic solid half-space. Appl Math Comput 198(2):494–505
Xiong C, Guo Y (2016) Effect of variable properties and moving heat source on magnetothermoelastic problem under fractional order thermoelasticity. Adv Mater Sci Eng 2016:12
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
We represent \(A,\,B,\,C,\,D\) and \(E\) in terms \(L = C_{k} - \iota C_{\nu } \omega - C_{T} \omega^{2} ,\quad M = \zeta_{0} + \zeta_{1} \omega^{2} ,\) \(N = \zeta_{8} + \zeta_{9} \omega^{2} ,\quad R = - \frac{{C_{2}^{2} }}{{\omega^{*2} }} + \omega^{2} ,\quad S = \frac{{2kc_{0}^{2} }}{{\gamma \omega^{*2} }} - \frac{{j\rho c_{0}^{2} \omega^{2} }}{\gamma }\) as follow:
Rights and permissions
About this article

Cite this article
Abo-Dahab, S.M., Abd-Alla, A.M., Kilany, A.A. et al. Effect of rotation and gravity on the reflection of P-waves from thermo-magneto-microstretch medium in the context of three phase lag model with initial stress. Microsyst Technol 24, 3357–3369 (2018). https://doi.org/10.1007/s00542-017-3697-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-017-3697-x