
Abstract
Purpose
The purpose is to obtain precise expressions of physical fields using the appropriate non-dimensional variables and normal mode analysis.
Methods
Based on the Lord–Shulman (L-S) theory and taking into account gravitational influences as well as temperature-dependent features, the fundamental equations for a nonlocal thermoelastic solid are developed.
Results
When a nonlocal thermoelastic media is swapped out for a thermoelastic one, this approach still holds true. Comparisons are done between the outcomes obtained and those expected for various nonlocal parameter values and for an empirical material constant. Additionally, comparisons are done between the outcomes for various gravity field values.
Conclusion
The nonlocal parameter plays a big part in how the physical fields are distributed. The distributions of the physical fields are significantly influenced by the gravity field.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The equation of heat conduction is of the parabolic form, predicting infinite speeds of propagation for heat waves, and does not contain any elastic terms, according to the classical uncoupled theory of thermoelasticity. In order to solve the problem inherent in the traditional uncoupled hypothesis, Biot [1] defined the coupled thermoelasticity theory. To resolve this contradiction, a generalized theory with a finite speed of heat transfer in elastic solids (the hyperbolic heat transport equation) has been developed in recent years. Lord and Shulman (L–S) [2] provided this generalization theory, also referred to as the extended thermoelasticity theory, which only has one thermal relaxation time parameter. The first- and second-time derivatives of the strain are included in the Lord and Shulman energy equation. They considered a new law of heat conduction instead of the law of Fourier. Based on their theory, the linear correlation between temperature and heat flux includes temperature rate and thermal rates. According to this theory, the temperature propagation speed is finite due to the hyperbolic heat equation. Actually, as well known, the term “generalized” usually refers to thermodynamic theories based on hyperbolic (wave-type) heat equation, so that, a finite propagation speed for thermal signal is admitted. The generalized thermoelasticity has drawn extensive attention due to its applications in diverse fields, such as earthquake engineering, nuclear reactor design, and high-energy particle accelerators. Youssef [3] developed an isotropic elastic material with temperature-dependent mechanical and thermal properties that has a generalized thermoelasticity with the L–S theory. Bagri and Eslami [4] provide a one-dimensional generalized thermoelasticity model of a disk based on the L–S theory. L–S theory and linked theory were developed by Othman and Said [5, 6] to investigate the effects of rotation and a magnetic field on fiber-reinforced thermoelastic media. The L–S theory has lately been established in numerous studies covering a wide range of topics [7,8,9,10,11,12,13,14,15,16,17].
The nonlocal theory of elasticity was used to study applications in nano-mechanics including lattice dispersion of elastic waves, wave propagation in composites, dislocation mechanics, fracture mechanics, surface tension fluids, etc. Eringen [18] was interested in material bodies whose actions at any interior location depended on the conditions at all other sites within the body. The impact of harmonically fluctuating heat on FG nanobeams was demonstrated by Zenkour and Abouelregal [19] within the framework of a nonlocal two-temperature thermoelasticity theory. Yu et al. [20] examined size-dependent generalized thermoelasticity using Eringen's nonlocal model. In the context of the nonlocal theory, Ebrahimi et al. [21] examined the wave propagation properties in magneto-electro-elastic nanotubes while taking the shell model into consideration. The axisymmetric vibrational behavior of a size-dependent circular nano-plate with functionally graded material with different types of boundary conditions was investigated by Shariati et al. [22]. The authors Acharya and Mondal [23], Roy et al. [24], Zenkour [25], Bachher and Sarkar [26], Abouelregal and Mohammed [27], Zhou and Li [28], Kaur et al. [29], Gupta et al. [30], Said [31], Atta et al. [32], Yahya et al. [33], and Abouelregal et al. [34] have all published studies on nonlocal thermoelasticity.
Any study on the propagation waves in generalized thermoelasticity materials can be significant in structural engineering, geophysics, and seismology. Such a study becomes more realistic if the presence of gravity could be considered. In this study, a nonlocal thermoelastic solid with a moving internal heat source will be developed. Discussions covered location, temperature-dependent characteristics, and influences of the gravitational field. With the use of normal mode analysis, precise solutions to the physical field are obtained. The L–S theory was discussed in relation to the issue.
The Description of the Problem
A nonlocal thermoelastic solid that is affected by gravity field and has a moving internal heat source in the half-space \((\,x \ge 0\,)\,.\) The surface of the half-space is subjected to a thermal shock which is a function of \(x\) and \(z.\) Thus, all quantities are independent of \(y.\) The dynamic displacement \(\underline{u} = (u,0,\,w),\,\,\,v = 0,\,\,\,\,\,\,\,\,\frac{\partial }{\partial \,y} = 0\,.\)
The constitutive equations as presented by Hetnarski and Eslami [35] and Eringen [36]:
The heat conduction equation as Lord and Shulman [2]
The equation of motion
where \(F_{1} = \rho \,g\,\frac{\partial \,w}{{\partial \,x}},F_{2} = 0,F_{3} = - \rho \,g\,\frac{\partial \,u}{{\partial \,x}}.\)
According to Said [37]:
The case of the temperature-independent modulus of elasticity if \(\delta_{0} = 0\).
When Eqs. (1) and (4) are introduced in Eq. (3), we obtain
We define the non-dimension variables as follows for convenience:
When Eqs. (7) are introduced in Eqs. (2), (5), and (6), we obtain
Normal Mode Analysis
The following normal modes can be used to decompose the solution of the physical variables under consideration:
Introducing Eqs. (11) in Eqs. (8)–(10), we obtain
where \(\,D = \frac{d}{dz},\) \(N_{1} = \varepsilon^{2} m^{2} + \frac{{\mu_{0} \,(1 - \delta_{0} T_{0} )}}{{\rho \,d_{0}^{2} }},\) \(N_{2} = a^{2} + m^{2} (1 + a^{2} \varepsilon^{2} ),\) \(N_{3} = g\,(1 + a^{2} \varepsilon^{2} ),\) \(N_{4} = 1,\) \(N_{5} = \varepsilon^{2} m^{2} + 1,\) \(N_{6} = \frac{{\mu_{0} \,(1 - \delta_{0} T_{0} )}}{{\rho \,d_{0}^{2} }}\,\,a^{2} + m^{2} (1 + a^{2} \varepsilon^{2} ),\) \(N_{7} = \frac{{\gamma_{0}^{2} \,T_{0\,\,} d_{0} \,l_{0} }}{{K\,(\lambda_{0} + 2\mu_{0} )}}\,\,m\,(1 + m\tau_{0} ),\) \(N_{8} = \frac{{\rho \,C_{E} \,d_{0\,} l_{0} }}{K}m\,(1 + m\,\tau_{0} ),\) \(N_{9} = \frac{{Q_{0} \,V_{0} l_{0}^{2} }}{K}\,\,(1 + m\,\tau_{0} ),\) \(N_{10} = N_{8} + a^{2} .\)
By solving Eqs. (12)–(14), we obtain
The bound solution of Eq. (15) is:
Similarly,
Using the above equations, we get
where \(k_{j}^{2} \,(\,j = 1,\,2,\,3\,)\) are the roots of the characteristic equation:\((\,k^{6} - C_{1} k^{4} + C_{2} k^{2} - C_{3} = 0\,).\)
The Boundary Conditions
In the physical problem, we should suppress the positive exponentials that are unbounded at infinity. To get the parameter \(M_{n} \,\,{(}n = {1,2,3)}\), the initial and regularity conditions are used to solve the present problem at \(\,z = 0,\) are
a. Thermal boundary condition that the surface of the half-space is subjected to a thermal shock
b. Mechanical boundary condition that the surface of the half-space is subjected to mechanical force
c. Mechanical boundary condition that the surface of the half-space is traction-free
where \(f_{1} ,\,f_{2}\) are constants and \(f\,(x,\,t),\,\,G(x,\,t)\) are arbitrary functions.
We can find the following using Eqs. (18)–(20) in Eqs. (21)–(23):
By solving the aforementioned system in Eq. (24), we obtain
We determine the values of the coefficients \(M_{j} (j = 1,\,2,\,3)\) by applying the inverse of the matrix approach of Eq. (25).
Validation and Applications
In the context of the L–S theory, we consider the numerical results for the physical constants as follows to compare the results for a nonlocal thermoelastic half-space solid with a moving internal heat source under the influence of the gravity field:
Figures 1, 2, 3 and 4 display the vertical displacement distribution \(w,\) thermodynamic temperature distributions \(\theta ,\) and the stress components \(\sigma_{zz} ,\,\sigma_{xz}\) for the nonlocal thermoelastic media with different values of the gravity field \(g\). Figure 1 depicts the variation of vertical displacement distribution \(w\) begins with positive values. Values of \(w\) decrease in the range \(0 \le z \le 10\). With increasing the value of the gravity field \(g,\) values of \(w\) decrease. Figure 2 shows that the variation of thermodynmic temperature \(\theta\) begins with a positive value and obeys the boundary conditions. Values of \(\theta\) start with increasing attain their maximum values and then decrease. With increasing the value of \(g,\) values of \(\theta\) decrease. Figure 3 introduces that the variation of stress component \(\sigma_{zz}\) begins with a negative value and satisfies the boundary conditions. Values of \(\sigma_{zz}\) increase in the range \(0 \le z \le 10\). With increasing the value of \(g,\) values of \(\sigma_{zz}\) increase. Figure 4 depicts that the variations of stress component \(\sigma_{xz}\) begin from a zero value at \(z = 0\) and satisfy the boundary conditions. With increasing the value of \(g,\) values of \(\sigma_{xz}\) decrease.

Vertical displacement distribution \(w\) for different values of the gravity field

Thermal temperature distribution \(\,\theta\) for different values of the gravity field

Distribution of stress component \(\,\sigma_{zz}\) for different values of the gravity field

Distribution of stress component \(\,\sigma_{xz}\) for different values of the gravity field
Figures 5 and 6 display the horizontal displacement components \(u\) and thermodynamic temperature distributions \(\theta\) for the nonlocal thermoelastic media with different values of an empirical material constant \(\delta_{0} .\) Figure 5 depicts that the variation of horizontal displacement distribution \(u\) starting with positive values. Values of \(u\) decrease attain their minimum values in the range \(0 \le z \le 3\) and then increase in the range \(3 \le z \le 10\). With increasing the value of \(\delta_{0} ,\) values of \(u\) increase and then decrease. Figure 6 depicts that the variation of thermodynamic temperature \(\theta\) starting with a positive value. Values of \(\theta\) decrease in the range \(0 \le z \le 10\). With increasing the value of \(\delta_{0} ,\) values of \(\theta\) increase and then decrease.

Horizontal displacement distribution \(u\) for different values of an empirical material constant

Thermal temperature distribution \(\,\theta\) for different values of an empirical material constant
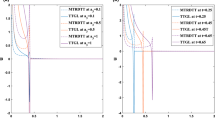
Figures 7 and 8 display the horizontal displacement components \(u\) and stress component \(\sigma_{xz}\) distributions for the thermoelastic media with different values of a nonlocal parameter \(\varepsilon .\) Figure 7 depicts that the variation of horizontal displacement distribution \(u\) starting with decreasing to reach its maximum values and then increases. The increasing of the value of \(\varepsilon\) causes decreasing values of \(u\) and then increases. Figure 8 depicts that the variations of stress component \(\sigma_{xz}\) begin from a zero value and obey the boundary conditions. The values of \(\sigma_{xz}\) attain their minimum values in the range \(0 \le z \le 0.5,\) then increase attain their maximum values in the range \(0.5 \le z \le 4,\) and again decrease. The increasing of the value of \(\varepsilon\) causes decreasing values of \(\sigma_{xz} .\) Figures 9 and 10 display 3D distributions of the non-dimensional thermal temperature \(\theta\) and stress component \(\sigma_{xz} .\) These figures are very important to study the dependence of these physical quantities on the vertical component of distance.

Horizontal displacement distribution \(u\) for different values of a nonlocal parameter

Distribution of stress component \(\,\sigma_{xz}\) for different values of a nonlocal parameter

Thermal temperature distribution \(\,\theta\) in three-dimensional

Distribution of stress component \(\,\sigma_{xz}\) in three-dimensional
Conclusion
The present theoretical results may provide interesting information and a mathematical foundation for working on the subject, because the increasing interest in the theory of thermoelasticity has many applications in such diverse fields as geophysics, acoustic wave damping in a magnetic field, machine element design of such equipment as heat exchangers, boiler tubes, nuclear devices emitting electromagnetic radiations, the development of magnetometers that are high in sensitivity and are super-conducting, the engineering of electrical power, plasma physics, etc. The new generalized nonlocal thermoelasticity model predicts novel characteristics for temperature, displacement, stresses, and strain. The conversations that have been held have led to the following conclusions:
-
a.
The nonlocal parameter plays a big part in how the physical fields are distributed.
-
b.
The distributions of the physical fields are significantly influenced by the gravity field.
-
c.
This impression supports the notion that the L–S theory is unquestionably a theory of generalized thermoelasticity.
-
d.
The physical fields are significantly impacted by the temperature-dependent characteristics.
-
e.
The physical fields are significantly impacted by the vertical distance.
-
f.
Even if a nonlocal thermoelastic medium is switched out for a thermoelastic one, the technique is still valid.
Abbreviations
- \(\sigma_{ij}\) :
-
Component of stress tensor
- \(e_{kk}\) :
-
Dilation
- \(e_{ij}\) :
-
Components of strain tensor
- \(\delta_{ij}\) :
-
Kronecker delta
- \(\rho\) :
-
Mass density
- \(C_{E}\) :
-
Specific heat at constant strain
- \(\lambda ,\,\mu\) :
-
Elastic constants
- \(t\) :
-
Time
- \(u_{i}\) :
-
Components of displacement vector
- \(K\) :
-
Thermal conductivity
- \(Q\) :
-
Internal heat source
- \(\tau_{0}\) :
-
Thermal relaxation time
- \(\varepsilon\) :
-
\(= a_{0} \,e_{0}\) Is the elastic nonlocal parameter
- \(T\) :
-
Thermal temperature
- \(T_{0}\) :
-
Reference temperature, \(\left| {\left( {T - T_{0} } \right)/T} \right| \prec 1\), \(\theta = T - T_{0}\)
- \(\alpha_{t}\) :
-
Linear thermal expansion coefficient, \(\gamma = (\,3\lambda + 2\mu \,)\alpha_{t} ,\,\,\)
- \(\mu_{0} ,\,\lambda_{0} ,\,\gamma_{0}\) :
-
Constants of material
- \(\delta_{0}\) :
-
Empirical material constant
- \(\overline{u} (z)\) :
-
Amplitude of the function \(u\,(x,z,\,t)\)
- \(m\) :
-
Complex time constant,
- \(a\) :
-
Wavenumber in the \(x\, -\) direction
- \(V_{0}\) :
-
Velocity of a moving internal heat source
- \(Q_{0}\) :
-
Magnitude of an internal heat source
References
Biot M (1956) Thermoelasticity and irreversible thermodynamics. J Appl Phys 27(3):240–253
Lord HW, Shulman YA (1967) Generalized dynamical theory of thermoelasticity. J Mech Phys Solids 15(5):299–309
Youssef HM (2005) Generalized thermoelasticity of an infinite body with a cylindrical cavity and variable material properties. J Therm Stress 28(5):521–532
Bagri A, Eslami MR (2004) Generalized coupled thermoelasticity of disks based on the Lord–Shulman model. J Therm Stress 27(8):691–704
Othman MIA, Said SM (2012) The effect of rotation on two-dimensional problem of a fiber-reinforced thermoelastic with one relaxation time. Int J Thermophys 33(1):160–171
Othman MIA, Said SM (2013) Plane waves of a fiber-reinforcement magneto-thermoelastic comparison of three different theories. Int J Thermophys 34(2):366–383
Said SM (2016) Two-temperature generalized magneto-thermoelastic medium for dual-phase lag model under the effect of gravity field and hydrostatic initial stress. Multi Model Mater Struct 12(2):362–383
Li Y, Li L, Wei P, Wang C (2018) Reflection and refraction of thermoelastic waves at an interface of two couple-stress solids based on Lord-Shulman thermoelastic theory. Appl Math Model 55:536–550
Youssef HM, El-Bary AA (2021) Characterization of the photothermal interaction on a viscothermoelastic semiconducting solid cylinder due to rotation under Lord-Shulman model. Alex Eng J 60(2):2083–2092
Shakeriaski F, Ghodrat M (2020) The nonlinear response of Cattaneo-type thermal loading of a laser pulse on a medium using the generalized thermoelastic model. Theor Appl Mech Lett 10(4):286–297
Sobhy M, Zenkour AM (2022) Refined Lord-Shulman theory for 1D response of skin tissue under ramp-type heat. Materials 15:6292
Atta D (2022) Thermal diffusion responses in an infinite medium with a spherical cavity using the Atangana-Baleanu fractional operator. J Appl Comput Mech 8(4):1358–1369
Malikan M, Eremeyev VA (2023) On dynamic modeling of piezomagnetic/flexomagnetic microstructures based on Lord-Shulman thermoelastic model. Arch Appl Mech 93:181–196
Alihemmati J, Beni YT (2022) Generalized thermoelasticity of microstructures: Lord-Shulman theory with modified strain gradient theory. Mech Mater 172:104412
Aljadani MH, Zenkour AM (2023) Effect of magnetic field on a thermoviscoelastic body via a refined two-temperature Lord-Shulman model. Case Stud Therm Eng 49:103197
Abouelregal AE, Askar SS, Marin M, Mohamed B (2023) The theory of thermoelasticity with a memory-dependent dynamic response for a thermo-piezoelectric functionally graded rotating rod. Sci Rep 13:9052
Abouelregal AE (2024) Modeling and analysis of a thermoviscoelastic rotating micro-scale beam under pulsed laser heat supply using multiple models of thermoelasticity. Thin Walled Struct 174:109150
Eringen AC (2002) Nonlocal continuum field theories. Springer, New York
Zenkour AM, Abouelregal AE (2014) Effect of harmonically varying heat on FG nanobeams in the context of a nonlocal two-temperature thermoelasticity theory. Eur J Comput Mech 23(1–2):1–14
Yu YJ, Tian X-G, Liu X-R (2015) Size-dependent generalized thermoelasticity using Eringen’s nonlocal model. Eur J Mech A Solids 51(5):96–106
Ebrahimi F, Dehghan M, Seyfi A (2019) Eringen’s nonlocal elasticity theory for wave propagation analysis of magneto-electro-elastic nanotubes. Adva Nano Res 7(1):1–11
Shariati M, Shishehsaz M, Mosalmani R, Roknizadeh SAS (2022) Size effect on the axisymmetric vibrational response of functionally graded circular nano-plate based on the nonlocal stress-driven method. J Appl Comput Mech 8(3):962–980
Acharya DP, Mondal A (2002) Propagation of Rayleigh surface waveswith small wavelengths in nonlocal visco-elastic solids. Sadhana 27(12):605–612
Roy I, Acharya DP, Acharya S (2015) Rayleigh wave in a rotating nonlocal magnetoelastic half-plane. J Theor Appl Mech 45(4):61–78
Zenkour AM (2017) Nonlocal thermoelasticity theory without energy dissipation for nano-machined beam resonators subjected to various boundary conditions. Microsyst Technol 23(1):55–65
Bachher M, Sarkar N (2019) Nonlocal theory of thermoelastic materials with voids and fractional derivative heat transfer. Waves Rand Comp Med 29(4):595–613
Abouelregal AE, Mohammed WW (2020) Effects of nonlocal thermoelasticity on nanoscale beams based on couple stress theory. Math Meth Appl Sci 1–17
Zhou H, Li P (2021) Nonlocal dual-phase-lagging thermoelastic damping in rectangular and circular micro/nanoplate resonators. Appl Math Model 95:667–687
Kaur I, Lata P, Singh K (2021) Study of transversely isotropic nonlocal thermoelastic thin nano-beam resonators with multi-dualphase-lag theory. Arch Appl Mech 91(1):317–341
Gupta S, Dutta R, Das S, Pandit DKr, (2022) Hall current effect in double poro-thermoelastic material with fractional-order Moore–Gibson–Thompson heat equation subjected to Eringen’s nonlocal theory. Wav Rand Compl Media. https://doi.org/10.1080/17455030.2021.2021315
Said SM (2022) 2D problem of nonlocal rotating thermoelastic half-space with memory-dependent derivative. Multi Model Mater Struct 18(2):339–350
Atta D, Abouelregal AE, Alsharari F (2022) Thermoelastic analysis of functionally graded nanobeams via fractional heat transfer model with nonlocal kernels. Math 10:4718
Yahya AM, Abouelregal AE, Khalil KM, Atta D (2021) Thermoelastic responses in rotating nanobeams with variable physical properties due to periodic pulse heating. Case Stud Therm Eng 28:101443
Abouelregal AE, Sedighi MH, Shirazi AH, Malikan M, Eremeyev VA (2022) Computational analysis of an infinite magneto-thermoelastic solid periodically dispersed with varying heat flow based on non-local Moore–Gibson–Thompson approach. Continuum Mech Thermodyn 34:1067–1085
Hetnarski RB, Eslami MR (2009) Thermal stress-advanced theory and applications, no 41, pp 227–231. Springer, New York
Eringen AC (1974) Theory of nonlocal thermoelasticity. Int J Eng Sci 2(12):1063–1077
Said SM (2020) The effect of phase-lags and gravity on micropolar thermoelastic medium with temperature dependent properties. J Porous Media 23(4):395–412
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). The authors received no financial support for the research, authorship, and/or publication of this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Said, S.M. Gravitational Influence on a Nonlocal Thermoelastic Solid with a Heat Source via L–S Theory. J. Vib. Eng. Technol. 12, 6449–6455 (2024). https://doi.org/10.1007/s42417-023-01262-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-023-01262-3