
Abstract—In the framework of the truncated Gutenberg–Richter distribution model, the problem of estimating the maximum possible regional magnitude M is considered. A new estimator of parameter M is proposed based on the bias-corrected maximum likelihood estimate, for which an exact formula is derived in the form of a finite sum of some functions of sample maximum μn. The new estimate is compared with some known estimates of parameter M and its fairly high efficiency is shown. Using a similar technique, an estimate is obtained of quantile QT(q) of the maximum earthquake magnitude in a given future time interval T. It is shown that the distribution density of magnitudes is significantly distorted at the ends of the magnitude range when using the model of magnitude perturbation by random errors.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
INTRODUCTION
The Gutenberg–Richter law for the distribution of earthquakes in a given region has the following form (Gutenberg and Richter, 1954; 1956):
where m is earthquake magnitude; m0 is the lower recording threshold; N(m) is the average number of the earthquakes with magnitudes above m on some time interval; a, b are coefficients characterizing the seismicity in a given region (b > 0). If we consider the magnitude of an arbitrarily selected earthquake as random value μ, then, after corresponding normalizing and introducing a distribution function of magnitudes F(m), we obtain the following relation from (1):
The distribution function F(m) has the form
For convenience, we will use natural logarithms and exponential function. In this case, the distribution function F(m) and distribution density f(m) specify the following exponential law:
We will use parameter s reciprocal to β:
Parameter s is measured in the same units as magnitude. From the statistical standpoint, parameter s is somewhat more useful. The maximum likelihood estimate for parameter s is the arithmetic mean of the magnitudes over the sample. Accurately up to a multiplier, it has a standard χ2-distribution with 2n degrees of freedom (where n is the sample size), which quickly converges to the normal law. At the same time, the estimate of quantity β reciprocal to s has a skewed distribution at small n and its convergence to the limiting value can be accompanied by outliers, i.e. it is non-robust. In this work, we consider the truncated Gutenberg–Richter law (TGR):
Parameter M is called the maximum possible regional magnitude, and its estimation is the main part of the paper. As we see, the TGR distribution has a sharp cutoff at the right end, which cannot be considered fairly well substantiated from the physical standpoint. Nevertheless, TGR is very widely used in seismological practice. This is due to the fact that in the main part of the magnitude range, this model retains the self-similarity properties inherent in the classical Gutenberg–Richter law, does not contradict finiteness of earthquake energy, and has only two parameters.
ESTIMATING PARAMETER M
Estimation of the maximum possible regional magnitude is an important issue in the problem of seismic risk assessment (Kijko and Sellevoll, 1989;1992; Pisarenko, 1991; Kijko and Graham, 1998; Pisarenko et al., 1996; Dargahi-Noubary, 2000; Kagan and Schoenberg, 2001; Kijko, 2004; Pisarenko and Rodkin, 2010a; Zoller and Holschneider, 2016; Vermeulen and Kijko, 2017; Beirlant et al., 2019; Pisarenko et al., 2021). In our statement of the problem, the maximum regional magnitude is expressed by parameter M. The general scheme proposed in this work for estimating parameter M is following. Initially, we consider estimation of parameters (М, s) by the standard likelihood method. We denote the sample of magnitudes under study (the catalog) by x = (x1, … , xn). The likelihood function has the following form:
As is known (e.g., (Pisarenko et al., 1996)), the maximum likelihood estimate for parameter M at any value of s is the maximum magnitude of the observed sample μn:
The maximum likelihood estimate for parameter s is found as the likelihood maximum for the TGR distribution (9) in which parameter M is replaced by μn, i.e, as the maximum of a function of s:
The obtained maximum likelihood estimate μn for parameter M has a systematic, negative bias with respect to the true value of parameter M, which is most significant at moderate n. The exact formula for this bias in the form of a finite effectively calculable sum is derived in Appendix. This formula has the following form
where u = 1 – exp[–(M – m0)/s]; Wn = u + \(\frac{{{{u}^{2}}}}{2}\) + … + \(\frac{{{{u}^{n}}}}{n}\); Е denotes mathematical expectation. As can be seen, the bias depends on the unknown parameter M. In the estimator described in this work, it is proposed to replace M by μn. Parameter s should be replaced by its standard maximum likelihood estimate \(\bar {s}\). Thus, the new estimator \(\bar {M}\) of parameter M corrected for bias has the following form:
where \(\bar {U}\) = 1 – exp[–(μn – m0)/\(\bar {s}\)]; \(\overline {{{W}_{n}}} \) = \(\bar {U}\) + \(\frac{{{{{\bar {U}}}^{2}}}}{2}\) + … + \(\frac{{{{{\bar {U}}}^{n}}}}{n}.\)
Below, we generalize estimator (13) by adapting it for the case of estimating the quantile Q(q) of TGR distribution, i.e., the Q(q) value determined by the equation
where q (the significance level of the quantile) is a number from interval [0, 1]. The quantile is the inverse function with respect to the function F(x). If the distribution function F(x) is continuous (which we assume), then the quantile and the distribution function monotonically increase and are bijectively related with each other. For TGR we have
where, as previously, u = 1 – exp[–(M – m0)/s]. For quantile (15), we may derive an estimate by replacing in (15) μn instead of М and \(\bar {s}\) instead s. This estimate has the bias
Using the same technique as we used when deriving estimate \(\bar {M}\), we find
where \(W_{n}^{q}\) = \(~u{{q}^{{1/n}}}\) + \(\frac{{{{{(u{{q}^{{1/n}}})}}^{2}}}}{2}\) + … + \(\frac{{{{{(u{{q}^{{1/n}}})}}^{n}}}}{n}\). Subtracting from the estimate Q(q|μn, \(\bar {s}\)) the right-hand side of (17) with the unknown parameters М, s replaced by μn, \(\bar {s}\), respectively, we obtain the final estimate of the quantile Q(q|M, s):
where \(\bar {U}\) = 1 – exp[–(μn – m0)/\(~\bar {s}\)]; \(\bar {W}_{n}^{{q~~}}\) = \(\bar {U}{{q}^{{1/n}}}\) + \(\frac{{{{{(\overline U {{q}^{{1/n}}}{{\;}})}}^{2}}}}{2}\) + … + \(\frac{{{{{(\overline U {{q}^{{1/n}}}{{\;}})}}^{n}}}}{n}\).
At q = 1, estimate (18) coincides with estimate (13) for the maximum magnitude.
COMPARISON OF DIFFERENT ESTIMATES OF PARAMETER M
A wide range of estimates obtained by the principle of moment-type statistical estimating are proposed in (Kijko and Sellevoll, 1989; 1992; Kijko and Graham, 1998; Coles and Dixon, 1999; Kijko, 2004; Holschneider et al., 2011; Kijko and Singh, 2011; Lasocki and Urban, 2011; Zoller and Holschneider, 2016; Vermeulen and Kijko, 2017; Beirlant et al., 2019). To construct these estimates, initially, the formula is written out for the mean (or some higher moment) of some consistent estimator that converges in probability to the true value at n \( \to \infty \). For example,
Solving this equation with respect to M by different approximate methods, one obtains a statistical estimate of the unknown parameter M. As some modifications of this method, one can also replace M by μn in the right-hand side of (19). We consider the version of Eq. (19) proposed in (Kijko, 2004; Kijko and Singh, 2011) and denote the corresponding estimate of parameter M by MK. This estimate is determined as the solution of the transcendental equation (19) with respect to M. It can be shown that this MK estimate is not defined at all possible μn values. For μn values that are quite close to M, Eq. (19) does not have a solution and the theoretical mean square error (MSE) of the MK estimate is infinite. Therefore, in order to compare it with the MSEs of other estimators, we have to truncate MK at some threshold h:
Let us consider another estimator of the maximum magnitude M.
Pisarenko et al. (1996) proposed an unbiased estimator of the maximum magnitude M which has the smallest variance among all the unbiased estimators:
Unfortunately, estimator (21) has a rather high variance. Therefore, we consider a truncated version of this estimator:
This modification of the estimator is quite eligible; its MSE decreases (depending on the selected cutoff threshold). But, naturally, a systematic bias appears; however, it is not very high.
Let us compare the above four estimators of the parameter M of maximum magnitude.
Figure 1 shows MSEs for the four above estimators. The averaging was carried out using N = 10000 synthetic catalogs with parameters m0 = 6.0, M = 8.0, s = 0.4, the truncation threshold for the estimates MKtrunk and MPtrunk is h = μn + 1; the МKtrunk estimate is less efficient than the other estimates for all n.

MSE for four estimates of maximum magnitude М from synthetic catalogs (N = 10000); m0 = 6.0, M = 8.0, s = 0.4. Truncation thresholds are МKtrunk and MPtrunk, h = μn + 1. Circles are \(\bar {M}\) estimate; squares are МKtrunk; asterisks are Bayes estimates; dots are VPtrunk.
Figure 2 shows the biases for the four estimates of the maximum magnitude M. The biases of estimate \(\bar {M}\) are lower by absolute value than biases of estimate МKtrunk. The biases of the МKtrunk estimate are positive whereas the biases of the \(\bar {M}\) estimate are negative.

Bias for four estimates of maximum magnitude М from synthetic catalogs (N = 10 000); m0 = 6.0, M = 8.0, s = 0.4, threshold is h = μn + 1. Circles are \(\bar {M}\); squares are МKtrunk; asterisks are Bayes estimates; dots are MPtrunk.
Figure 3 illustrates standard deviations of the four estimates.

Standard deviations STD for four estimates of maximum magnitude М from synthetic catalogs (N = 10000); m0 = 6.0, M = 8.0, s = 0.4. Х-axis is n; Y-axis is STD. Circles are \(\bar {M}\); squares are МKtrunk; asterisks are Bayes estimates; dots are MPtrunk; threshold is h = μn + 1.
The comparison of the estimates is conducted for the typical values of TGR parameters s = 0.4; M = 8.0; m0 = 6.0. We also used other variants of the parameters for the comparison. This yields somewhat different estimates; however, these different variants suggest the same conclusions as we obtained for the cited parameter values: estimate \(\bar {M}\) is most efficient, the Bayes estimate is close to it, and the МKtrunk estimate is least efficient.
ESTIMATING THE QUANTILES OF THE MAXIMUM EARTHQUAKE IN A FUTURE TIME INTERVAL T
As noted above, in most practical situation, parameter M is estimated unstably because of the insufficient number of observations in the range of strong earthquakes. Besides, it is unclear to which time interval parameter M refers—one thousand years, or one million years, or “for all the time.” Therefore, in (Pisarenko et al., 2008; 2010; Pisarenko and Rodkin, 2009; 2010a; 2010b; 2013; Zoller et al., 2013) it was proposed to characterize the seismicity in the range of the strongest events using quantiles QT(q) of level q of a random variable—the maximum magnitude М(Т) of an earthquake in the future time interval T (in a given region). Hereinafter we assume that the catalog is declustered by one of known declustering methods (e.g., (Pisarenko and Rodkin, 2019)) and that it can be considered as a Poisson random process with some intensity λ (the number of events per unit time in a given magnitude range). The mean number of events is λT, the standard deviation from the mean is \(\sqrt {\lambda T} \). The random quantity М(Т) is correctly defined and, under certain conditions, it is substantially more stable and robust than the statistical estimates of parameter M. Moreover, as a special case q = 1 and Т \( \to \infty \), it includes the estimate of parameter M “for all the time.” Below, we present formulas for estimating quantiles QT(q) in the context of TGR model. These formulas are derived by the same method as the above formulas for estimating parameter M:
(1) We consider the maximum likelihood estimate for QT(q) and denote it by \({{\hat {Q}}_{T}}\)(q). This estimate depends on the sample’s maximum magnitude μn: \({{\hat {Q}}_{T}}\)(q) = \({{\hat {Q}}_{T}}\)(q| μn).
(2) The \({{\hat {Q}}_{T}}\)(q|μn) estimate has a noticeable bias which is particularly strong in the case of relatively small samples:
\({\text{Bias }}({{\hat {Q}}_{T}}(\left. q \right|{{\mu }_{n}}))~ = E\left\{ {{{{\hat {Q}}}_{T}}({q \mathord{\left/ {\vphantom {q {{{\mu }_{n}}}}} \right. \kern-0em} {{{\mu }_{n}}}})} \right\}~\,\, - \,\,~{{Q}_{T}}\left( q \right).\)
This bias is a function of the unknown parameter M. We denote this function by G(M): \(G\left( M \right) = E{{\{ }_{T}}({{\hat {Q}}_{T}}(\left. q \right|{{\mu }_{n}}){\text{ }}\} \,\,~ - \,\,~{{Q}_{T}}\left( q \right).\)
The maximum likelihood estimate for bias G(M) is G(μn).
(3) The resulting estimate for the quantile QT(q), which we denote \({{\bar {Q}}_{T}}\)(q|μn), is obtained by subtracting G(μn) from the estimate \({{\hat {Q}}_{T}}\)(q|μn):
In Appendix, formulas for \({{\hat {Q}}_{T}}\)(q|μn), G(μn) are derived:
where \(\bar {q}\) = \(\frac{1}{{{{\lambda }}T}}\)log[(1 – exp(–λT))q + exp(–λT)];
EXAMPLE OF M ESTIMATING FROM REAL CATALOG
We consider the CMT catalog (1976–2015) for the region of the Kuril Islands and Kamchatka between (42.81°, 53.56° N) and (146.38°, 161.06° E).
The catalog was declustered using the algorithm described in (Pisarenko and Rodkin, 2019). The lower threshold of the complete recording of the events is selected at magnitude m0 = 5.7. As the result, 158 main shocks in the magnitude range m ≥ 5.7 are obtained. The flow rate (intensity) of seismic events is λ = 3.9606 yr–1. The maximum earthquake m = 8.296 occurred on November 15, 2006 at 46.57° N, 153.29° E. Figure 4a shows the spatial distribution of the analyzed earthquakes and Fig. 4b shows their frequency–magnitude relationship.

(а) Spatial distribution of earthquakes under study; (b) frequency–magnitude graph; m0 = 5.7, s = 0.482 (β = 2.075).
The results for the four above estimates of parameter M are presented in Table 1.
We tested five variants of the “free parameters” of the Bayes’ method and obtained a rather wide scatter of estimates of parameter M and its standard deviation–from 16 to 25% relative values. Such a scatter means that in this case, the Bayes estimates of the parameters rather strongly depend on the choice of the a priori domain for the parameters. The scatter of at most 10% could be considered tolerable. However, with the selected values of the free parameters (the a priori intervals for М, s and μn ≤ M \( \leqslant ~\) μn + 1; 0.25 ≤ s ≤ 0.75), the values of the Bayes estimates proved to be close to the new estimates introduced in this work, and we left them for comparison.
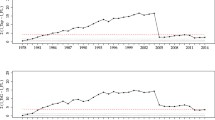
Figure 5 shows the graph of the estimate of quantile QT(0.95) ± std.

Graph of quantile estimate QT(0.95)\(~ \pm \) std.
ESTIMATING THE STANDARD DEVIATION OF PARAMETER ESTIMATES
The variance and standard deviation of the above estimators could be estimated by the same technique as we used to estimate the bias. However, this yields very complicated formulas, and we show here a simpler and more universal way of estimation. The method is based on the ideas of bootstrap estimates (Efron, 1979). In some way, we build a model of the observed catalog and then, using random numbers, generate a substantial number of random catalogs (e.g., 10000), based on which it is possible to estimate the standard deviation of the estimators as accurately as desired. As a model distribution, we propose the TGR model in which the unknown parameters are replaced by their maximum likelihood estimates. Of course, the resulting estimates will differ from the unknown true values, but these deviations will be, so to speak, of the second order of smallness compared to the standard deviation itself. In the case of large and moderate sample sizes, they will be small and can well be neglected. However, the use of this method in the case of small samples needs a close control and additional research. We recommend to calculate several variants of the models in which the parameter estimates obtained by the maximum likelihood method are subjected to small perturbations and to see how strongly the estimates of the standard deviation will change.
Using the above method, we estimated the characteristics of the scatter of estimates shown in Figs. 3, 5 and presented in Table 1.
We note that on November 4, 1952, a strong earthquake occurred in the region of the Kuril Island arc at 52.623° N, 159.779° E. The magnitude of this event in the different catalogs is estimated at 8.9–9.0. The CMT catalog which we used in this study starts from 1976 and does not include this earthquake. However, the magnitude of this earthquake falls within the scatter limits of the estimates indicated in Table 1 and can be assumed to not contradict these estimates.
The estimates of the maximum possible magnitude of the earthquakes in the Kuril island arc determined based on the regional tectonic characteristics generally agree with the estimates presented in Table 1 (Tarakanov, 1990; Ermakov, 1997). For instance, the estimate of the maximum possible magnitude from the Riznichenko’s and Tarakanov’s nomograms yields Mmax = 8.0–8.5 and Mmax = 8.6–9.5, respectively. As noted in (Ermakov, 1997), Tarakanov’s estimates are overrated because they disregard the division of the Central Kuril block into the middle and transitional parts.
MODELS WITH IMPRECISE MAGNITUDES
The TGR model is quite frequently used with some “addition” (e.g., (Kijko and Sellevol, 1989; Lyubushin and Parvez, 2010)), namely, assuming that the “apparent” magnitudes ma published in the catalogs are obtained from some “true” magnitude ma0 by adding a certain random error \(\Delta \)ma:
The random error is assumed to be uniformly distributed on some interval [\( - {{\Delta }};~ + {{\Delta \;}}]\).\({{\Delta }}\) is typically assumed to be 0.2–0.5. This model is convenient in that the probability density \({{{{\varphi }}}_{\Delta }}\left( m \right)\) for it is in a very simple way expressed in terms of the original distribution function F(m):
Model (26)–(27) slightly smoothes the original TGR model and this smoothing is most pronounced at the ends of the magnitude range. It should be taken into account that the use of the values on the order of \(\Delta ~\,\, \approx 0.5\) implies that the true unknown parameter M can differ from the observed one by \({{\Delta }}\). Besides, if the presence of errors in the measurements of magnitude is certain, the very notion of a “true magnitude” is rather vague. For completeness of the discussion, we should have compared the quality of fitting the simple and smoothed TGR models to the catalog under study. We will not go into the discussion on this issue as it is beyond the scope of our paper but only resent the density of the smoothed model and compare it with that of the unsmoothed model (see Fig. 6).

Probability density of TGR (heavy line) and TGR with magnitude perturbed by random error, Δ = 0.5. TGR parameters m0 = 6.0; M = 8.0; s = 0.5.
It can be seen that the smoothed model fairly noticeably distorts the truncated Gutenberg–Richter law, especially at the left end of the range. This will undoubtedly affect the estimate of parameter s (or β).
DISCUSSION AND CONCLUSIONS
In this work, the new method for estimating the maximum possible regional magnitude M, constructed in the scope of the truncated Gutenberg-Richter distribution (GGR) model, is proposed. Also, the method for estimating the quantile QT(q) of the maximum earthquake in a future time interval is described. The exact formula for the bias of the estimates of the maximum magnitude M and quantile QT(q) in the form of a finite effectively computed sum is derived. These biases are expressed in terms of the incomplete beta-function with one of the arguments equal to –1. The corresponding complete function with this argument value is infinity. For the incomplete function (it is finite), it was possible to obtain the exact formula in the form of the effectively calculable sum (12), (17).
It is shown that the new estimate is on a par in efficiency with the known common estimates of the maximum magnitude M and in some cases appreciably outperforms them. Among all the known methods, it is perhaps only the Bayesian method that can be considered comparable with the new one in efficiency (although in the presented example it is slightly inferior to the new method in terms of MSE). However, the Bayesian method contains two “free parameters” of the algorithm. These are the parameters of the a priori interval for β and M. In the case when the Bayesian method uses magnitude perturbation (which is a very frequent practice), then, in addition, the third parameter appears—the scale of perturbation. These two or three parameters are frequently selected without a reasonable discussion and substantiation, and the selection is based on the individual and intuitive considerations as to which parameter value best fits the author’s notions about the phenomenon under study. At the same time, the new estimate does not depend on any free parameters, and the procedure of its application is defined unambiguously. In the Bayesian method, a very important factor in the estimation of the maximum magnitude M is the choice of the a priori interval for M. Whether the end of the a priori interval is specified at (μn + 0.2), (μn + 1), or (μn + 1.5) can strongly affect the result of the estimation of M. Unfortunately, these details are typically not discussed and the selection of the a priori intervals is not substantiated.
The Bayesian approach has a large place in the problems of seismic risk assessment (Lyubushin, 2010; Pisarenko et al., 1996; 2021; Pisarenko and Lyubushin, 1999; Lyubushin et al., 2002; Kijko, 2012; Zentner, 2020). One general note concerning the Bayesian approach is following. In this approach, the unknown parameters, in particular, parameter M, are considered as random variables whereas in the original problem they were assumed to be unknown quantities. Among statisticians, there is no consensus about the validity of this replacement. The use of random quantities always implies an ensemble of the realizations (a general population) in which these random quantities are realized. For the Bayesian approach, however, this is not always easy to do. If we consider the maximum magnitude M, then, what is generally of interest is the maximum possible magnitude for a given particular region rather than the population of the possible magnitudes M (the discussion on this subject is presented in (Kendall and Stuart, 1961; Pisarenko and Rodkin, 2021)).
In one of the early works, Pisarenko et al. (1996) proposed an unbiased estimate of the maximum magnitude M which has the least variance among all the unbiased estimates:
This estimate can be derived from Tate’s general results (Tate, 1959; see also (Kendall and Stuart, 1961); however, in these works this estimate is obtained in a complicated way using integral equations whereas Pisarenko et al. (1996) presented a simple and transparent derivation. A valuable property of estimate (28) is that it has a zero bias and it should be used in the problems of seismic risk assessment where the systematic bias is more important than the random scatter of the estimate. Unfortunately, estimate (28) has a rather large variance so that its MSE is higher than in many other estimates. Above, we used the truncated version of estimate (28). It is quite competitive, its MSE decreases (depending on the selected truncation threshold), but, naturally, a systematic bias emerges.
In the author’s opinion, the most effective estimators for the parameter of maximum magnitude M are two methods: the new estimate \(\bar {M}\) introduced in this work (13), (17) and the Bayesian estimate. Both these estimates can be recommended for use (with the substantiated selection of the Bayesian “free parameters,” it is advisable to preliminarily test several variants of the Bayesian free parameters). The additional, quite important information about the maximum possible shocks is provided by the quantile estimate QT(q) described above.
Of course, the methods for estimating the maximum possible magnitudes are not limited to TGR in which context we considered the issue in this work. To solve this problem, also more complex models that take into account different details in the behavior of the tail of magnitude distribution are proposed (e.g., Pisarenko et al. (2020) developed a composite model of the frequency–magnitude relation of the earthquakes using extreme value theory (Gumbel, 1958; Embrechts et al., 1997; De Haan, 2006)). More complex models need more strong events for the detailed description of tail distributions; however, this is not always possible in the specific practical tasks. Thus, the TGR model which is just intended for working with relatively few strong events will be in demand for a long time.
REFERENCES
Beirlant, J., Kijko, A., Reynkens, T., and Einmahl, J., Estimating the maximum possible earthquake magnitude using extreme value methodology: the Groningen case, Nat. Hazards, 2019, vol. 98, no. 3, pp. 1091–1113.
Coles, S. and Dixon, M., Likelihood-based inference for extreme value models, Extremes, 1999, vol. 2, no. 1, pp. 5–23.
Dargahi-Noubary, G.R., Statistical Methods for Earthquake Hazard Assessment and Risk Analysis, Huntington: Nova Science Publishers, 2000.
De Haan, L. and Ferreira, A., Extreme Value Theory: An Introduction, New York: Springer, 2006.
Efron, B., Bootstrap methods: another look at the jackknife, Ann. Stat., 1979, vol. 7, no. 1, pp. 1–26.
Embrechts, P., Kluppelberg, C., and Mikosch, T., Modelling Extremal Events, Berlin: Springer, 1997.
Ermakov, V.A., Tectonic zoning of the Kuril Islands and its implications for seismicity, Izv., Phys. Solid Earth, 1997, vol. 33, no. 1, pp. 26–41.
Gumbel, E.J., Statistics of Extremes, New York: Columbia Univ. Press, 1958.
Gutenberg, B. and Richter, C., Seismicity of the Earth and Associated Phenomena, 2nd ed., Princeton: Princeton Univ. Press, 1954.
Gutenberg, B. and Richter, C., Earthquake magnitude, intensity, energy, and acceleration, part II, Bull. Seismol. Soc. Am., 1956, vol. 46, no. 2, pp. 105–145.
Holschneider, M., Zoller, G., and Hainzl, S., Estimation of the maximum possible magnitude in the framework of the doubly truncated Gutenberg–Richter model, Bull. Seismol. Soc. Am., 2011, vol. 101, no. 4, pp. 1649–1659.
Kagan, Y.Y. and Schoenberg, F., Estimation of the upper cutoff parameter for the tapered Pareto distribution, J. Appl. Probab., 2001, vol. 38(A), pp. 158–175.
Kendall, M. and Stuart, A., The Advanced Theory of Statistics, vol. 2, London: Griffin, 1961.
Kijko, A., Estimation of the maximum earthquake magnitude m max, Pure Appl. Geophys., 2004, vol. 161, no. 8, pp. 1655–1681.
Kijko, A., On Bayesian procedure for maximum earthquake magnitude estimation, Res. Geophys., 2012, vol. 2, no. 1, pp. 46–51.
Kijko, A. and Graham, G., Parametric-historic procedure for probabilistic seismic hazard analysis. Part I: Estimation of maximum regional magnitude m max, Pure Appl. Geophys., 1998, vol. 152, no. 3, pp. 413–442.
Kijko, A. and Sellevoll, M.A., Estimation of earthquake hazard parameters from incomplete data files. Part I: Utilization of extreme and complete catalogs with different threshold magnitudes, Bull. Seismol. Soc. Am., 1989, vol. 79, pp. 645–654.
Kijko, A. and Sellevoll, M.A., Estimation of earthquake hazard parameters from incomplete data files. Part II: Incorporation of magnitude heterogeneity, Bull. Seismol. Soc. Am., 1992, vol. 82, pp. 120–134.
Kijko, A. and Singh, M., Statistical tools for maximum possible earthquake estimation, Acta Geophys., 2011, vol. 59, no. 4, pp. 674–700.
Lasocki, S. and Urban, P., Bias, variance and computational properties of Kijko’s estimators of the upper limit of magnitude distribution, M max, Acta Geophys., 2011, vol. 59, no. 4, pp. 659–673.
Lyubushin, A.A. and Parvez, I.A., Map of seismic hazard of India using Bayesian approach, Nat. Hazards, 2010, vol. 55, no. 2, pp. 543–556.
Lyubushin, A.A., Tsapanos, T.M., Pisarenko, V.F., and Koravos, G.Ch., Seismic hazard for selected sites in Greece: A Bayesian estimates of seismic peak ground acceleration, Nat. Hazards, 2002, vol. 25, no. 1, pp. 83–89.
Pisarenko, V.F., Statistical evaluation of maximum possible magnitude, Phys. Chem. Earth, Part A: Solid Earth Geod., 1991, vol. 27, no. 9, pp. 757–763.
Pisarenko, V.F. and Lyubushin, A.A., A Bayesian approach to seismic hazard estimation: Maximum values of magnitudes and peak ground accelerations, Earthquake Res. China, 1999, vol. 13, no. 1, pp. 47–59.
Pisarenko, V.F. and Rodkin, M.V., The instability of the M max parameter and an alternative to its using, Izv., Phys. Solid Earth, 2009, vol. 45, no. 12. pp. 1081–1092.
Pisarenko, V.F. and Rodkin, M.V., Heavy-Tailed Distributions in Disaster Analysis, Dordrecht: Springer, 2010.
Pisarenko, V.F. and Rodkin, M.V., The new quantile approach: application to the seismic risk assessment, in Natural Disasters: Prevention, Risk Factors and Management, Rascobic, B. and Mrdja, S., Eds., New York: Nova Publishers, 2013, pp. 141–174.
Pisarenko, V.F. and Rodkin, M.V., The maximum earthquake in future T years: Checking by a real catalog, Chaos, Solitons Fractals, 2015, vol. 74, pp. 89–98.
Pisarenko, V.F. and Rodkin, M.V., Declustering of seismicity flow: statistical analysis, Izv., Phys. Solid Earth, 2019, vol. 55, no. 5. pp. 733–745.
Pisarenko, V.F. and Rodkin, M.V., The Mmax problem: possible approaches, Surv. Geophys. (in press).
Pisarenko, V.F., Lyubushin, A.A., Lysenko, V.B., and Golubeva, T.V., Statistical estimation of seismic hazard parameters: maximal possible magnitude and related parameters, Bull. Seismol. Soc. Am., 1996, vol. 86, no. 3, pp. 691–700.
Pisarenko, V.F., Sornette, A., Sornette, D., and Rodkin, M.V., New approach to characterization of M max and the tail of distribution of earthquake magnitudes, Pure Appl. Geophys., 2008, vol. 165, no. 5, pp. 847–888.
Pisarenko, V.F., Sornette, D., and Rodkin, M.V., Distribution of maximum earthquake magnitudes in future time intervals: application to the seismicity of Japan (1923–2007), Earth, Planets Space, 2010, vol. 62, pp. 567–578.
Pisarenko, V.F., Rodkin, M.V., and Rukavishnikova, T.A., Stable modification of frequency–magnitude relation and prospects for its application in seismic zoning, Izv., Phys. Solid Earth, 2020, vol. 56, no. 1, pp. 53–65.
Pisarenko, V.F., Lyubushin, A.A., and Rodkin, M.V., Maximum earthquakes in future time intervals, Izv., Phys. Solid Earth, 2021, vol. 57, no. 2, pp. 163–179.
Tarakanov, R.Z., Estimation of the maximum possible earthquake magnitudes for the Kuril-Kamchatka region, in Prirodnye katastrofy i stikhiinye bedstviya v Dal’nevostochnom regione, tom 1 (Natural Disasters and Natural Disasters in the Far East Region, vol. 1), Vladivostok: RIO DVO AN SSSR, 1990, pp. 28–47.
Tate, R.F., Unbiased estimation: functions of location and scale parameters, Ann. Math. Stat., 1959, vol. 30, no. 2, pp. 341–366.
Vermeulen, P. and Kijko, A., More statistical tools for maximum possible earthquake magnitude estimation, Acta Geophys., 2017, vol. 65, no. 4, pp. 579–587. https://doi.org/10.1007/s11600-017-0048-3
Zentner, I., Ameri, G., and Viallet, E., Bayesian estimation of the maximum magnitude m max based on the extreme value distribution for Probabilistic Seismic Hazard Analysis, Pure Appl. Geophys., 2020, vol. 177, pp. 5643–5660.
Zoller, G. and Holschneider, M., The maximum possible and the maximum expected earthquake magnitude for production-induced earthquakes at the gas field in Groningen, The Netherlands, Bull. Seismol. Soc. Am., 2016, vol. 106, no. 6, pp. 2917–2921.
Zoller, G., Holschneider, M., and Hainzl, S., The maximum earthquake magnitude in a time horizon: theory and case studies, Bull. Seismol. Soc. Am., 2013, vol. 103, no. 2A, pp. 860–875.
ACKNOWLEDGMENTS
I am grateful to D.V. Pisarenko for his valuable comments.
Funding
The work was supported by the Russian Foundation for Basic Research under project no. 20-05-00433.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
The author declares that he has no conflicts of interest.
Additional information
Translated by M. Nazarenko
APPENDIX
APPENDIX
We consider function
The integral in the right-hand side can be transformed in the following way. We introduce new variable
and denote
Thus, we obtain
Rights and permissions
About this article

Cite this article
Pisarenko, V.F. Estimating the Parameters of Truncated Gutenberg–Richter Distribution. Izv., Phys. Solid Earth 58, 80–88 (2022). https://doi.org/10.1134/S1069351322010074
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1069351322010074