
Abstract
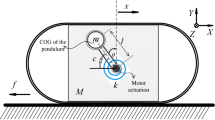
A model of a mobile capsule robot that consists of the housing and internal body is considered. The internal body can move relative to the housing along a straight line. The internal body is attached to the housing by a spring. The system motion is excited by a force that acts between the housing and the internal body. The force changes in a pulse-width periodic mode. The robot’s motion along a straight line on a rough horizontal plane is investigated. It is assumed that the dry Coulomb friction acts between the housing and the plane. The dependence of the average steady state robot velocity on excitation parameters is analyzed. It is established that it is possible to control the magnitude and direction of the robot motion by changing the period and the duty cycle of the pulse-width excitation signal. The effect of the variation in the direction of the robot motion due to changing the excitation period is observed. This effect is associated with the phenomenon of resonance.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
References
F. L. Chernous’ko, “On the motion of a body containing a movable internal mass,” Dokl. Phys. 50, 593 (2005).
F. L. Chernous’ko, “Analysis and optimization of the motion of a body controlled by means of a movable internal mass,” J. Appl. Math. Mech. 70, 819 (2006).
F. L. Chernous’ko, “The optimal periodic motions of a two-mass system in a resistant medium,” J. Appl. Math. Mech. 72, 116 (2008).
H. B. Fang and J. Xu, “Dynamic analysis and optimization of a three-phase control mode of a mobile system with an internal mass,” J. Vibrat. Control 17 (1), 19–26 (2011).
T. Yu. Figurina, “Optimal motion control for a system of two bodies on a straight line,” J. Comput. Syst. Sci. Int. 46, 227 (2007).
N. N. Bolotnik and T. Yu. Figurina, “Optimal control of the rectilinear motion of a rigid body on a rough plane by means of the motion of two internal masses,” J. Appl. Math. Mech. 72, 126 (2008).
N. N. Bolotnik, T. Yu. Figurina, and F. L. Chernous’ko, “Optimal control of the rectilinear motion of a twobody system in a resistive medium,” J. Appl. Math. Mech. 76, 1 (2012).
A. G. Egorov and O. S. Zakharova, “The energy-optimal motion of a vibration-driven robot in a resistive medium,” J. Appl. Math. Mech. 74, 495 (2010).
H. Y. Li, K. Furuta, and F. L. Chernousko, “Motion generation of the capsubot using internal force and static friction,” in Proceedings of the 45th IEEE Conference on Decision and Control, USA, San Diego, 2006, pp. 6575–6580.
Y. Liu, H. Yu, and T. C. Yang, “Analysis and control of a capsubot,” in Proceedings of the 17th IFAC World Congress, Seoul, Korea, July 6–11, 2008, pp. 756–761.
A. A. Farahani, A. A. Suratgar, and H. A. Talebi, “Optimal controller design of legless piezo capsubot movement,” Int. J. Adv. Robotic Syst. 10, 126 (2013).
M. N. Huda, H. Yu, and S. O. Wane, “Self-contained capsubot propulsion mechanism,” Int. J. Automat. Comput. 8 (3), 348–356 (2011).
L. Sun, P. Sun, and X. Qin, “Study on micro robot in small pipe,” in Proceedings of the United Kingdom Automatic Control Council UKACC International Conference on Control’98, Swansea, UK, Sept. 1–4, 1998 (IET, 1998), pp. 1212–1217.
V. G. Chashchukhin, “Simulation of dynamics and determination of control parameters of inpipe minirobot,” J. Comput. Syst. Sci. Int. 47, 806 (2008).
V. G. Gradetskii, M. M. Knyaz’kov, L. F. Fomin, and V. G. Chashchukhin, Mechanics of Miniature Robots (Nauka, Moscow, 2010) [in Russian].
K. Zimmermann, I. Zedis, N. Bolotnik, and M. Pivovarov, “Dynamics of a two-module vibration-driven system moving along a rough horizontal plane,” Multibody Syst. Dyn. 22, 199–219 (2009).
K. Zimmermann, I. Zedis, and C. Behn, Mechanics of Terrestrial Locomotion with a Focus on Nonpedal Motion Systems (Springer, Heidelberg, 2009).
Author information
Authors and Affiliations
Corresponding author
Additional information
Original Russian Text © N.N. Bolotnik, A.M. Nunuparov, V.G. Chashchukhin, 2016, published in Izvestiya Akademii Nauk, Teoriya i Sistemy Upravleniya, 2016, No. 6, pp. 146–160.
Rights and permissions
About this article

Cite this article
Bolotnik, N.N., Nunuparov, A.M. & Chashchukhin, V.G. Capsule-type vibration-driven robot with an electromagnetic actuator and an opposing spring: Dynamics and control of motion. J. Comput. Syst. Sci. Int. 55, 986–1000 (2016). https://doi.org/10.1134/S106423071605004X
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S106423071605004X