
Abstract
The design optimization of ship hull form based on hydrodynamics theory and simulation-based design (SBD) technologies generally considers ship performance and energy efficiency performance as the design objective, which plays an important role in smart design and manufacturing of green ship. An optimal design of sustainable energy system requires multidisciplinary tools to build ships with the least resistance and energy consumption. Through a systematic approach, this paper presents the research progress of energy-efficient design of ship hull forms based on intelligent optimization techniques. We discuss different methods involved in the optimization procedure, especially the latest developments of intelligent optimization algorithms and surrogate models. Moreover, current development trends and technical challenges of multidisciplinary design optimization and surrogate-assisted evolutionary algorithms for ship design are further analyzed. We explore the gaps and potential future directions, so as to pave the way toward the design of the next generation of more energy-efficient ship hull form.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Shipping exhibits a great impact on the global emissions, which accounts for almost 3\(\%\) of the global anthropogenic emissions in 2018, and leads to the increase of greenhouse gas (GHG) emissions by about 9.6\(\%\) degree from international shipping compared to the 2012 levels [1]. Recently, the International Maritime Organization (IMO) made a target to reduce 50\(\%\) GHG emissions by 2050. The challenging target has attracted increasing attention toward ship energy systems and alternative fuels that can offer a more sustainable performance over the past decade. The optimization of an energy system either on land or on ships can be considered at three levels—i.e., synthesis, design, and operation [2], and each level cannot be completely isolated from the others. To be more specific in shipping areas, it is suggested in [2, 3] that the optimization of the whole ship can be considered as a complex system with all its subsystems—e.g., hull form, energy equipments, propulsors, navigation equipment, etc., which is indispensable for its whole life cycle. Thus, it is necessary and beneficial to further expend the border of ship energy system to include aspects belonging to other disciplines, such as hull form and propulsor optimization, and hence, moving toward the holistic ship optimization [2].
Nowadays, smart design of ship hull form has attracted much attention under the promotion of low-carbon economics. The hull form design does not focus merely on static water resistance minimization any longer, but shifts toward pursuing optimal overall navigation performance. Under the concept of green ship design, it is of great demand to establish the energy-efficient and environmental-friendly ship manufacturing industry. In 2014, the IMO proposed the energy efficiency design index (EEDI), which calls for hull form design to be safer, more environmental friendly, more cost-effective, and more comfortable in the future. Therefore, energy conservation and emission reduction have become the main issues of future development of ship design. As the core component of ship design, hull form design plays a crucial role in energy conservation and fuel efficiency, which is considered as the fundamental technology that can bring profound and long-lasting impacts in terms of energy efficiency [4]. Hence, energy-efficient hull form design plays an important role to reduce total resistance, fuel consumption, and carbon dioxide emission. However, traditional hull form design methods struggle to meet the development demands of green ship.
Ship hull form design calls for multidisciplinary optimization tools involving numerous sub-domains, with close relation to hydrodynamic performance, navigation performance, energy efficiency, seakeeping performance, general layout, operational economy, etc. With the development of computer-aided design techniques, the simulation-based design (SBD) approaches have significantly promoted the transformation of hull form design from traditional empirical methods to intelligent modes [5]. Through the SBD approaches, ship performance calculation and optimization techniques based on computational fluid dynamics (CFD) [6,7,8,9,10] are combined with hull geometry reconstruction methods, aiming to achieve the best performance (e.g., minimal resistance and lowest energy consumption) under given conditions or constraints.
This paper reviews the progress of intelligent optimization techniques for ship hull form design in recent years. The rest of the paper is organized as follows. We summarize the main techniques in hull form optimization in Sect. 2. Section 3 describes SBD and intelligent optimization methods used for energy-efficient ship hull. For more in-depth research of this filed, we present multidisciplinary design optimization and robust design for ship hull in Sect. 4. Specifically, we elaborate the advances in surrogate-assisted optimization for expensive problems in Sect. 5, which is not only the underlying optimization tool but also of promising potential to develop new methods in designing green hull form. Moreover, Sect. 6 provides some conclusions and insights for intelligent hull form design optimization.
2 Main technologies in hull form optimization
Ship hull form design optimization based on hydrodynamics theory and SBD technology is a complicated system engineering, which integrates multidisciplines, i.e., CFD, CAD, computer technologies, and optimization methods. General hull form design patterns are shown in Fig. 1. The basic principle of ship hull form design based on SBD technology is to complete the numerical simulation and hydrodynamic calculation for given performance targets such as ship resistance and seakeeping with the assistance of CFD technology [11]. Then, optimization methods are used to search the hull geometric design space based on the automatic hull geometry reconstruction technology so as to obtain the excellent hull form with the best hydrodynamic performance under condition of comprehensive constraints. Therefore, hull form optimization system mainly involves five key technologies: CFD numerical simulation technology, hull geometry reconstruction technology, optimization technology, approximation technology, and integration technology.

Principle of ship hull form design optimization based on SBD technology
2.1 CFD numerical simulation technology
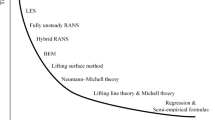
Ship hull form optimization based on hydrodynamic theory requires detailed description of the flow field around the hull and effective measurements to control the flow around. Therefore, ship hull form optimization is inseparable from the scientific guidance of ship hydrodynamic theory, including the calculation method and analysis technology of hydrodynamics. The hydrodynamic theory used to solve ship resistance can be divided into two categories, i.e., potential flow theory and viscous flow theory, while potential flow theory can be further separated into linear one and nonlinear one. Currently, commonly used potential flow theories include linear wave resistance theory based on Michell integral method and nonlinear wave resistance theory based on Rankine source method. Viscous flow theory primarily utilizes CFD methods to predict a ship’s viscous resistance and wave resistance. It involves setting up numerical simulations for static water conditions and wave conditions to investigate the optimal hull design with minimal resistance.
2.2 Hull geometry reconstruction technology
Hull geometry reconstruction technology serves as a bridge between ship resistance performance evaluations and optimization methods. For hull form optimization based on hydrodynamic theory, especially CFD methods [11], the relationships between objective functions (such as commonly used minimum total resistance) and design variables are often implicit. How to establish the relationships between design variables and objective functions is a prerequisite for implementing CFD-based hull form optimization. Usually, a small number of parameters are used to parameterize the geometric shape of the hull form firstly. Then, we build the relationships between hull’s shape parameters and design variables. After that, better design variables can be obtained with the assistance of optimization methods. Lastly, geometric reconstruction techniques can be used to modify the geometric shape of the ship hull. According to different ship parameters, hull geometric reconstruction techniques can be divided into two categories: (1) ship parameterization—i.e., expressing the geometric shape of the hull through a series of ship characteristic parameters; (2) geometric modeling—i.e., achieving the reconstruction of the hull’s geometric shape by changing the positions of a series of control points. It is worthy noting that the stability of the designed hull form needs to be guaranteed when generating different geometric shapes.
2.3 Optimization technology
Generally, the optimization techniques commonly used in the field of ship design can be broadly classified into three categories:
-
1.
Gradient-based optimization algorithms [12], including nonlinear programming (NLP), sequential quadratic programming (SQP), and mixed integer quadratic programming (MISQP).
-
2.
Derivative-free intelligent optimization algorithms [13, 14], such as genetic algorithm (GA) [15,16,17], particle swarm optimization (PSO) algorithm [14, 18], artificial bee colony (ABC) algorithm [19], and other evolutionary algorithms.
-
3.
Mixed optimization algorithms combining gradient-based optimization with intelligent optimization techniques, e.g., combining GA with SQP [20], combining DPSO with SQP [21], and combining DPSO with the DIRECT method [14, 22].
Gradient-based optimization methods show fast convergence and good performance given initial values, but there also has obvious shortcomings. Ship hull form optimization usually involves multiple disciplines such as speediness, wind and wave resistance, maneuverability, etc. It is difficult to establish clear analytical expressions between each performance index and design variables while they may possess the characteristics of multi-peak, non-conductive or black box. The gradient information can only be obtained by computationally expensive numerical analysis. For complex and nonlinear ship resistance performance optimization problems, gradient-based optimization cannot be applied directly and it is easy to converge to the local optimal solutions. Moreover, optimization results obtained by it are very sensitive to the settings of initial values. Contrarily, intelligent optimization algorithms have strong global search ability, but their local search ability is poor, which results in slow search speed. Therefore, the combination of above two optimization methods can take advantage of their respective advantages to form a more efficient hybrid global optimization algorithm.
2.4 Approximation technology
Optimization algorithms usually require numerous iterative objective evaluations before achieving satisfactory results. It intends to be unaffordable if a high-precision solver is involved, e.g., CFD, which requires long response time and intensive computational cost. Therefore, it is difficult to complete a quick optimization process within the stipulated time. How to solve a large number of numerical calculations based on hydrodynamic theory is a prerequisite for ship hull form optimization engineering. There are two main methods: (1) high-performance computing—e.g., parallel/distributed computing techniques; (2) approximation technology, which can simulate the design space to obtain the implicit expressions of multiple objective functions with low computational cost, and thus greatly reducing the computational resource in the optimization process. As a result, approximation technique has received more attention from researchers. Approximation technique mainly includes some parts [23]: screening and variable reduction, design of experiments (DoE) sampling, approximate model (or surrogate model) construction, and sequential sampling.
-
1.
Screening and variable reduction is an efficient step for reducing the cost of the surrogate’s construction, with drastic dimensionality reductions being possible.
-
2.
DoE is a crucial part in building surrogate models, which is an effective mathematical statistical sampling method for selecting sample points for simulation. It is important to allocate sample points in the design space reasonably so as to improve the model accuracy. A good experimental design should satisfy that the sample points are full of the design space, that is, uniformity and orthogonality, and can effectively compress the sample size to reduce computational overhead.
-
3.
At present, commonly used surrogate models include kriging model, response surface method (RSM), neural network (NN), radical basis function (RBF), and support vector machine (SVM). Compared with other commonly used surrogate models, kriging models can provide not only the predicted value of the prediction point, but also the prediction error (variance), that is, the confidence interval of the Gaussian process (GP) regression model. Thereby, the prediction probability errors given by the kriging model can be used naturally to dynamically update the model to improve its prediction accuracy.
-
4.
Sequential sampling is an efficient way of making use of limited computational budget. Techniques make use of both the prediction and the uncertainty estimates of the surrogate models to intelligently sample the design space.
2.5 Integration technology
Hull form optimization based on hydrodynamic theory is a complex system engineering involving various technologies. How to integrate different modules to form a unified interface optimization platform is also the key part of realizing optimization process automation. Nowadays, integration technologies are mainly completed based on optimization platforms, such as ISIGHT [24] and OPENFOAM [25]. ISIGHT is a popular and relatively mature optimization platform, and thus most researchers use it for synthesis [8, 18, 24, 26,27,28,29,30]. ISIGHT optimization platform integrates CFD resistance calculation module and CAD geometry reconstruction module, and reserves program interface between modules. OPENFOAM is a CFD open source platform that can be re-developed, which has been used a lot [31,32,33,34,35,36]. Wan et al. [37] developed the naoe-FOAM-SJTU solver for marine ship hydrodynamics problems based on the OPENFOAM platform. Furthermore, they have developed a holistic hull optimization platform for hull form design, called OPTShip-SJTU [9, 38, 39], which integrates several key components like hull form expression, ship shape transformation, experimental design, hydrodynamic performance evaluation, approximation module and optimization algorithms. Ao et al. [40] proposed multi-fidelity deep network assisted optimization methods to reduce the exponential growth in data requirements as the result of increasing design variables caused by integration.
3 Application of SBD and intelligent optimization methods for energy-efficient ship hulls
This section reviews and analyzes the research on ship hull form design based on SBD technology and intelligent optimization methods, elaborates and summarizes the main theories and methods involved in optimization, and focuses on the latest developments of intelligent optimization methods and surrogate model design in this field. In general, ship hull form optimization design problem can be expressed as follows:
where \(f({\textbf {x}})\) is the objective function of hull form optimization, i.e., hydrodynamic performance index, such as resistance value, companion fraction value, and motion response. And \({\textbf {x}}\) refers to design variables (solution vectors), representing the ship shape transformation parameters, D is the feasible domain, which means the design space of the problem. Any point on the feasible domain represents a solution vector \({\textbf {x}}\). \(g_i({\textbf {x}})\) and \(h_j({\textbf {x}})\) are inequality constraint function and the equation constraint function [41], respectively, e.g., precise shape constraints for the wet surface area, main scale, displacement volume and even propeller shaft height. Therefore, ship hull form optimization is a typical class of engineering optimization problems that involves a large number of design variables and constraints.
Ship hull form design based on SBD solved by intelligent optimization algorithms requires a large number of computationally expensive objective functions before finding the global optimum. It is extraordinarily time-consuming if physical model tests or numerical simulation calculations are carried out in each generation of the optimization process. Therefore, numerous surrogate models, instead of the original high-fidelity CFD evaluations, can be used to reduce computational cost. However, surrogate model accuracy plays a crucial role in affecting the effectiveness of the optimization. Often, surrogate model reliability can be improved through cross-validation and reduction of model variance. DoE generally makes the sample points fill the design space, which does not consider the differences of the objective function in the design space. As a result, it cannot guarantee the local accuracy of surrogate models. Dynamically updating the approximation model by adding new sample points in an orderly manner with certain criteria (e.g., selecting points with largest variance) can effectively improve the surrogate accuracy. Therefore, the optimization idea of ship resistance performance of SBD technology combining intelligent optimization algorithms and approximate models is shown in Fig. 2, where approximate models replace part of true objective function calculations, and the optimal hull form design can be obtained with minimal computational resource.

The framework of SBD technology incorporating intelligent optimization and approximate models
We review the representative publications on optimal design of ship hull form published in important scientific journals, which are indexed by Web of Science in the past ten years. As can be seen from Fig. 3, publication count keeps on the rising trend over time, especially in the last three years. Therefore, we summarize the mainstream methods proposed in the representative publications, as discussed according to the major components depicted in Fig. 2.

Distribution of articles published in important journals
3.1 Design variables based on hull form expressions and transformations
As the first step of hull form optimization design, the key technology of hull form expression lies in how to design variables effectively, accurately and directly to express the complex hull geometry (e.g., ship scale ratio, longitudinal centre of buoyancy, and etc.). Based on ship form representation technology, ship form transformation technology mainly focuses on which deformation method (hull geometry reconstruction technology) can effectively obtain smooth and practical ship form, large deformation space and fewer deformation control parameters. The choice of hull form transformation technique and the determination of deformation parameters affect the design space for hull form optimization design problems. The current ship hull form transformation methods include [42] translation method, free-form deformation (FFD), B-splines, Lackenby transform, superposition fusion (morphing), RBF, orthogonal basis functions and so on. FFD method has been used to automatically modify the geometry of the ship [9, 35, 39, 43,44,45,46,47]. In the literature [32], multiple branches of ship surfaces are combined and deformed in conjunction with the FFD method. In the literature [48], RBF method was used for local deformation of the bow, and FFD method for local deformation of the stern, and translation method for global deformation, respectively.
Meanwhile, some recent research focuses on the establishment of ship hull form transformation methods, such as [35, 42, 45, 49, 50]. Among them, Li et al. [45] combined the mesh deformation with the adaptive method. Wang et al. [42] proposed an improved RBF method for ship hull form expression and optimization. Ichinose [50] expanded the traditional method which only superimposes two or three hull forms to N hull forms by introducing the center of gravity coordinate system in the superposition fusion method, and further assisted decision making by visualizing and analyzing the decision space in the vicinity of the optimal hull forms.
To obtain a more practical and efficient design space for hull form representation, some dimension reduction techniques have been used to simplify the design variables [36, 51,52,53,54,55] and reduce computational cost to some extent. Some works use Karhunen–Loeve expansion (KLE) [51, 56,57,58,59,60] or proper orthogonal decomposition (POD) [34, 35] to compress dimensionality of design space, and then establish a reduced dimensional representation for hull form transformation. Among them, D’Agostino et al. [51] proposed off-line decision space dimension approximation method that relies on geometric variance to conduct decision space evaluations without simulation or performance analysis. It is worthy pointing out that, under certain conditions, KLE (or POD) method is approximately equivalent to principal components analysis (PCA) method [59]. Zhang et al. [61] adopted a linear dimensionality reduction method, principal component analysis, to decrease the dimensionality of the geometric space, which can compress optimization variables and thus reducing computational resource consumption. Zheng et al. [52] proposed a dynamic spatial approximation method that used data mining techniques to dynamically approximate the range and number of design variables during the optimization process. Qiang et al. [55] designed a multi-stage spatial approximation technique by combining Self-Organizing Map (SOM) and rough set theory respectively. Zheng et al. [52] established a hierarchical dimension approximation method by combining SOM with simulated annealing search method. Khan et al. [53] proposed a ship hull shape-supervised initial design space dimensionality approximation method to describe the important intrinsic structure of the hull by constructing shape-signature vectors (SSVs) such that the resulting reduced dimensional subspace retains the required reconfiguration capabilities, which can provide diversity, robustness, and more important hull physicsal information.
3.2 Objective functions based on hydrodynamic performance evaluation
The technology of ship hydrodynamic performance evaluation is to provide calculation tools for the objective functions (such as speediness, seakeeping and maneuverability) in ship form optimization design problems, so as to evaluate the quality of the optimization results. The reliability, efficiency, and economy of hydrodynamic performance evaluation techniques are major concerns and difficulties for ship hull form optimization design. Traditional methods use empirical formulas and model tests, while some recent methods adopt CFD numerical simulation calculations. They can be divided into following two categories:
-
1.
Methods based on potential flow theory. Michell integral method, Neumann–Kelvin method, Dawson method, and Rankine method are used to calculate the resistance of a rising wave. Slice theory and facet method are adopted for calculating seakeeping performance. Also, slender body theory and facet method can be used to calculate maneuvering performance. At present, there have been many studies on the optimal design of ship hull form based on the potential flow theory. Moreover, the calculation cost is low as a result of the small mess volume. However, the optimized ship shape may be more complicated and strange as a result of the ignorance of viscous effects. In addition, practical problems are simplified and resulting calculation accuracy may not meet the actual requirements, which may account for the failure of its reliability.
-
2.
Methods based on viscous flow theory. For example, Reynolds average Navier–Stokes (RANS) equation considers viscosity, separated eddy simulation method, and direct numerical simulation method. Ship hull form optimization viscous solvers generally use RANS models to meet the high accuracy requirements. The numerical results obtained by viscous flow CFD methods are usually of high accuracy and it can capture many details of the flow field.
3.3 Intelligent optimization algorithm
Early ship hull form optimization concentrates on single-objective optimization [62], and its aim is to minimize the hydrodynamic resistance performance.
Recently, ship hull form design optimization turns to multi-objective optimization which considers several performance indicators simultaneously [63]. For example, Yang et al. [43] improved the hydrodynamic performance of a ship hull form by solving the hull design optimization problem at different speeds, and explores the design space using a multi-objective PSO (MOPSO) optimization algorithm where two objective functions—i.e., total drag at two different speeds (12 and 14 knots)—are evaluated by RANS solver. Following the same idea, Ni et al. [44] used MOPSO algorithm to optimize the SWATH hull form where total drag at two different speeds (11 and 15 knots) are considered.
Compared with single-objective optimization problems, the main characteristic of multi-objective optimization Problems (MOPs) is that their optimization objectives are conflicting [64, 65]. That is to say, there is no single optimal solution to make all objectives optimal, and the optimal solution is a set of solutions that compromise each other among objectives, i.e., Pareto front (PF). The aim of solving an MOP is to obtain a set of vectors that are uniformly distributed and as close as possible to the true PF of the problem, which in turn facilitates the decision maker’s selection based on preferences or further requirements [66,67,68]. Therefore, it is required that the resulting final solution set has good convergence and diversity. As a class of global optimization algorithms based on population-directed stochastic search, multi-objective evolutionary algorithms (MOEAs) have become the most popular methods for solving MOPs. We list some representative MOEAs, such as NSGA-II based on Pareto dominance [69], MOEA/D based on decomposition strategy [70] and the multi-objective particle swarm optimization algorithm [71].
During the past decade, ship researchers have carried out a lot of research on ship optimization design using SBD technology. The various intelligent optimization algorithms used for ship hull form design in the existing mainstream literature are summarized in Table 1. Also, the comparative distribution of the number of different algorithms (the improved algorithms for PSO, IPSO, and DPSO are also denoted by PSO) is shown in Fig. 4. It can be seen that the single-objective optimization methods, such as PSO and its improved versions IPSO and DPSO, and the multi-objective optimization methods, such as NSGA-II, have received more attention. In addition to consider two objective functions in ship hull form optimization design, some recent works explore three or even more objective functions, and then use reference point-based high-dimensional multi-objective optimization algorithm NSGA-III to solve them [72].

Distribution of number of different intelligent optimization algorithms for ship hull form design
3.4 Approximate technology
The accuracy of any approximate model is primarily affected by two factors: (i) noise in the data and (ii) inadequacy of the fitting model (called modeling error or bias error). In view of the first factor, screening and variable reduction as well as DoE techniques can play important roles in constructing a good approximation model.
As the number of variables in the surrogate increases, the number of simulations required for surrogate construction rises exponentially (curse of dimensionality). However, some of the variables may have only a negligible effect on the response surface approximation. Hence, several techniques have thus been proposed for evaluating the importance of the variables economically [23], like variable screening techniques, variance-based techniques, variable transformation techniques and dimensionality reduction by subspace construction.
Mainstream DoE methods include orthogonal experimental sampling [102, 103], Latin Hypercube Sampling (LHS) [59, 90, 91] and Optimized Latin Hypercube Sampling ( Optimized Latin Hypercube Sampling, OLHS) [7, 8, 34] and Sobol sampling [104, 105]. For example, Tahara et al. used an orthogonal test sampling method to sample the design space for the optimization of DTMB 5415 [102] and Delft ship hull form [103], respectively. Huang et al. [31] used the LHS method for sampling the central slice optimization of a trimaran. Wu et al. [37] used OLHS sampling for optimizing design of DTMB 5415. In addition, some other sampling methods have been successfully applied in ship hull form optimization. Volpi et al. [106] used the Latin center-of-mass Voronoi gridded sampling method to initially sample the Delft ship hull form optimization. Ouyang et al et al. [107] proposed an improved maximum entropy sampling method for S60 ship hull form for optimization analysis. We summarize DoE methods used in the existing literature in Table 2. It can be clearly seen that LHS and OLHS methods are most popular among researchers because they have better prediction accuracy and simpler construction process. Moreover, it is evident that Sobol sampling attracts several attention mainly due to the fact that Sobol sampling can effectively ensure the construction of high-dimensional surrogate models with high prediction accuracy.
Recently, surrogate model construction in hull form optimization has led to a large number of research works. Peri et al. [111] introduced surrogate models into the field of hull form optimization earlier, and compared the advantages and disadvantages of various surrogate models such as RSM, kriging, NN and RBF. Since then, several studies have given examples of hull form optimization based on surrogate models. Wang et al. [112] construct a robust surrogate model of the ship hydrodynamic performance in response to design changes based on CFD results. Kang et al. [113] construct 36 high-precision agent models of structural limit state for solving river-sea-going ship design problems considering uncertain factors. Tahara et al. [102] used kriging model in optimizing the Delft catamaran. Volpi et al. [106] used DRBF and DKG methods to construct approximation models to optimize the Delft catamaran. Chen et al. [58] adopted four approximation models, i.e., RBF, kriging, SVM, and multi-harmonic spline methods, and experimental results showed that RBF model works better. Leotardi et al. [114] used RBF to construct an approximate model for optimizing DTMB 5415. Diez et al. [115] adopted NN method to train an approximate model in optimizing DTMB 5415. Serani et al. [14] used RBF method to construct a surrogate model to optimize DTMB 5415. Huang et al. [31] used RBF method to construct an approximate model in the triple-hulled ship optimization. Li et al. [116] used RSM in optimizing the total resistance of a bulk carrier. Chen et al. [58] used RBF to optimize the Delft Catamaran 372 model. Yang et al. [5] used RBF in optimizing a Series 60 hull to reduce the total drag at two speeds. Wu et al. [37] took advantage of kriging method to construct an approximate model to optimize the DTMB 5415. Hou [22] used NN to optimize the EEDI of a Wigley hull. Diez et al. [6] used RBF to optimize the drag and seakeeping performance of Delft Catamaran 372 model considering stochastic conditions. Zong et al. [27] used second order RSM to optimize the total drag coefficient of a trimaran. Coppede et al. [32] used the kriging model to optimize the total drag of KCS vessel. Zhang et al. [26] used Elman neural network to optimize the total drag coefficient of DTMB-5512 and Wigley III hulls in calm water at given speed. Miao et al. [9] optimized the S60 catamaran using the kriging model to reduce drag by varying the de-hulling shape and separation. Serani et al. [57] optimized the DTMB-5415 hull by using RBF to minimize the expected value of the mean total drag and maximize the maneuverability of the vessel in a completely stochastic environment. The popularity of deep learning in recent years also brings opportunities in the field of ship optimization, e.g., Zhang et al. [78] constructed a surrogate model for predicting the total resistance based on a deep belief network and showed its superiority over the traditional surrogate models.
The methods for evaluating hydrodynamic performance of ship have different fidelity levels. It is possible to obtain hydrodynamic performance metrics for new hull forms by using different physical models or numerical discretization schemes if these methods complement each other. Then, high-precision surrogate models can be constructed and thus evaluating new sample hulls in a highly efficient manner. Therefore, for simulation-based hull hydrodynamic performance optimization, the establishment of multi-fidelity surrogate models is very necessary. A series of research works have followed this line of idea and have become one of the research hotspots [34, 73, 96, 98, 105, 117,118,119]. For example, a dual-fidelity co-kriging surrogate model was proposed for the optimization design of marine propellers, where the boundary element method is used for the low-fidelity model and RANS is used for the high-fidelity model [105]. Liu et al. [73] proposed a multi-fidelity co-kriging surrogate model that uses more low-fidelity sample data to assist fewer high-fidelity sample data to predict high-fidelity outputs, which can reduce the total computational cost and make the surrogate model have relatively high accuracy. A multi-fidelity co-kriging surrogate model was similarly developed for Japanese bulk carriers in [34], and POD technology is used to study the flow field dimensionality reduction so as to make full use of the flow field results of the new sample hull. In conclusion, the multi-fidelity surrogate models can balance high efficiency and high accuracy while using fewer samples for high-fidelity simulations and more samples for low-fidelity simulations. However, it has not yet been widely applied in the optimization of hydrodynamic performance of ship hull forms.
The accuracy and applicability of surrogate models may vary for different engineering problems. Sometimes, high-fidelity accuracy surrogate cannot be guaranteed with only a single model in the entire design space. Therefore, surrogate ensemble (SEN) methods have been proposed to fully utilize advantages of different surrogate models. To be specific, ensemble surrogates are constructed by weighted combination of several different surrogate models [120]. The key point of constructing an ensemble model is to determine the weight coefficients. In [18], an adaptive surrogate ensemble strategy that combines polynomial response surface (PRS) and kriging surrogate models by means of weighted sums was proposed. The weight of each surrogate model is determined according to its prediction error. The optimal weighting factor in surrogate ensemble is determined based on the minimization of the local mean square error in [108]. Therefore, various surrogate models mentioned above are summarized in Table 3, which shows that kriging model, NN model, and RBF model are the most commonly used ones. However, there is no more systematic comparative study to explore the performance of these different surrogate models.
4 Multidisciplinary design optimization and robust design of ship hull
Ship form optimization design based on hydrodynamic theory is a systematic discipline, which needs the support of many disciplines. During the optimization process, it is necessary to consider the coupling of multiple disciplines, the design of variables and various nonlinear constraints. As a result, multidisciplinary design optimization (MDO) [124] strategy has been successfully applied in the field of ship hull form design and continues to gain attention. MDO was first proposed in the aerospace field and applied to the exterior design of aircraft (e.g., airplane wings). Then, MDO was expanded to various complex engineering system optimization problems. For example, MDO used for hull form optimization takes full account of the interaction and coupling among various disciplines/subsystems, such as ship hull form (hull scheme and hydrodynamic performance analysis), structural science (pressure-resistant hull design), and energy science (energy consumption and energy carrying capacity). More specifically, MDO utilizes effective design optimization strategies to optimize all design variables synchronously and coordinate interdisciplinary interactions to organize and plan the entire design process of the hull form. Usually, MDO can be mainly categorized into single-level and multi-levels according to the multidisciplinary system decomposition hierarchy. Single-level algorithms are suitable for solving simple systems with few design variables, small computational volume and less disciplines. Whereas multi-level algorithms can make up for the above mentioned deficiencies effectively. Commonly used multi-level optimization algorithms [124] include collaborative optimization (CO), concurrent subspace optimization (CSO), bilevel integrated system synthesis (BLISS) and enhanced collaborative optimization (ECO) algorithms. The development of these algorithms intends to be mature, and interested readers can refer to [124] for more details.
For MDO, design variables and parameters are usually regarded as deterministic input information. However, uncertainties are widespread and unavoidable exist in real sea conditions, such as aleatoric uncertainties caused by random factors and epistemic uncertainties caused by lack of knowledge [17, 125]. For example, material properties, geometry and external workloads of equipment are all uncertain. For multidisciplinary system, uncertain information can be propagated through the coupling relationship between different disciplines. The cumulative effects of the propagation can degrade the performance of the system and thus greatly reduce the reliability and safety of the system. Combined with uncertainty analysis in the field of engineering optimization, Fig. 5 gives three common types of uncertainty faced in robust design optimization of ships.

Diagram of uncertainty types in robust ship design systems
-
1.
Environmental uncertainty (A in Fig. 5). It is possible that the same vessel performs differently in different sea state environments (e.g., the effects of wind, waves, and currents). The actual speed varies from the designed speed to some extent.
-
2.
Parameter space uncertainty (B in Fig. 5). This kind of uncertainty exist in decision space. The performance of optimal solution may degrade due to the error of the manufacturing techniques. The goal of robust optimization is to find the solution with little performance loss within the error range of the decision variable \({\textbf {x}}\).
-
3.
Performance evaluation uncertainty (C in Fig. 5). It refers to uncertainty in the target space, caused by simulation or experimental results with noise or bias in the predictions of the approximate model [85]. Robust optimization aims to deal with this kind of uncertainty.
Some scholars have applied MDO to scientific ship hull form design. For example, Liu et al. [92] established a multi-objective MDO design for heavy underwater vehicles. Feng et al. [90] considered the multidisciplinary optimization of ship hull forms for offshore aquatic vessels, in which both the drag performance and the quality of the aft flow field were taken into account. Chen et al. [100] combined the coupling of hydrodynamic discipline, weight and balance discipline, propulsion system discipline, and energy discipline, thus they established a four-disciplinary, three-objective optimization system of drag, forward momentum, and endurance. Luo et al. [29] established a MDO system based on CO method for underwater vessels. Hu et al. [18] combined the disciplines of hull shape, structural design, and energy utilization to establish a multidisciplinary coupled computational model and conducted optimization by PSO. Yang et al. [75] proposed a MDO framework based on CCO method, which considers the underwater glider optimization in five disciplinary areas of hydrodynamic shape, pressure-resistant shell, buoyancy, attitude and energy.
As seen from Fig. 5, ship robust design are fronted with many uncertainties. Measuring Uncertainty Quantification (UQ) is a prerequisite for achieving robust design optimization, which can address the effects of on output brought by uncertain inputs. Some commonly used UQ methods include multidimensional polynomial chaos [81], interval analysis [85], and traditional Monte Carlo method. For example, Wei et al. [81] established reliability-based robust design optimization (RBRDO) for ship hull form design and performed uncertainty analysis by combining polynomial chaos expansion and maximum entropy method; Wan et al. [85] used interval analysis for UQ analysis and a two-tier nested optimization system where the inner tier considers the uncertainty interval of the objective function. In addition, they considered the uncertainty of the surrogate models and performed UQ based on the confidence of the surrogate models. Other related works that consider UQ in the field of ship design can be found in detail in the literature [6, 57, 62, 106, 114, 118].
In terms of MDO for ship design, Diez et al. [126] analyzed some uncertain factors and applied Bayesian theory to quantify the degree of uncertainty of optimal design, and then established the conventional model and the model based on robust design in speedboat design. Leotardi et al. [114] considered multidisciplinary robust design optimization (MRDO) in uncertain environments. They achieved optimal ship hull form design assisted by variable accuracy approximation models through a multidisciplinary feasibility structure. Wu et al. [79] considered the design optimization of ultra-deep sea ship design system, where MDO was divided into two parts, i.e., deterministic optimization and uncertainty optimization. They used the deterministic CO structure to organize the coupled collaborative optimization of related disciplines, and used the interval analysis method to introduce the uncertainty of design parameters and surrogate model. Finally, more reliable optimization results were obtained through PSO optimization.
In conclusion, although MDO has achieved some success in the field of ship hull form design, there are still a lot of aspects that need to be further studied. How to combine intelligent optimization algorithms and approximation techniques to achieve faster modeling, higher optimization efficiency, and better optimization quality. Moreover, robust MDO method incorporating uncertainty can fully consider the actual large engineering system, which is conducive to improving the practicality and reliability of the ship hull form. It is promising to provide guidance for exploring the new generation of ship hull form design methods.
5 Advances in surrogate-assisted evolutionary optimization methods for hull design
Evolutionary optimization methods are being increasingly studied for solving hull form design optimization for its easy implementation and high efficiency. However, the objective function evaluations of hull design optimization are usually time-consuming (i.e., computationally expensive). The representative methods used are surrogate-assisted evolutionary algorithms (SAEAs) [127, 128], also referred to data-driven evolutionary optimization [129]. The basic framework of SAEAs is illustrated in Fig. 6(a), where the surrogate model is trained by historical or real-time data of the optimization problems, and they can be used to replace a majority part of actual models for the purpose of the rapid fitness evaluation. Nowadays, SAEAs have been the mainstream method in the field of ship form design optimization, which are expected to provide a guidance for future work of artificial intelligence-based and knowledge-based ship hull form optimization.

The illustration of SAEAs
The first step of SAEAs is surrogate model construction, as illustrated in Fig. 6b, for which Gaussian process (also known as kriging model) [130] is widely used [127] as a result of its good performance. GP model can provide a confidence-based uncertainty measurement, which facilitates the online model updating. However, existing studies have shown that the time complexity of constructing a GP grows exponentially and the accuracy of the model decreases as the dimension of the decision variables increases, making it difficult to solve large-scale optimization problems [128, 131]. In addition, the fitting ability of different models trained by data with different characteristics varies greatly. It is impossible to construct a unified and efficient surrogate model. Recently, SAEAs for expensive multi-objective optimization problems have gradually gained attention from scholars. A number of works have appeared both at the level of algorithm design [127, 128] and engineering applications (e.g., trauma system allocation optimization [132] and fuel efficiency [133].).
Due to the deviation between surrogate model and real mode, it is necessary to update surrogate model by using the newly generated real data samples during the optimization process, which is called model management. In this procedure, surrogate model is updated by sampling new points through the extraction function according to the posterior information of the model. The purpose of the extraction function is to establish new sampling samples to update surrogate model, which plays a crucial role in balancing the optimization performance of both exploration and exploitation. Currently, model management in multi-objective optimization has become one of the frontiers, such as filling sampling criterion based on ensemble strategy [127].
As a dominant method for solving expensive problems, how to construct effective and efficient surrogate models in high-dimensional space remains an immense challenge. A high-accuracy surrogate model can be trained by sufficient data samples, however, which can inevitably result in high surrogate construction time consumption. How to balance surrogate accuracy and construction time is a key issue when adopting SAEAs for solving HEPs. The existing surrogate models are mainly selected from GP, RF and RBF. Some novel and effective machine learning methods, such as deep brief networks [134], should be investigated as surrogate models in the evolutionary community, especially for problems with complicated data structures. Recently, Jin et al. [129] conducted a detailed review and analysis of data-driven evolutionary algorithms. SAEAs are classified into online and offline methods according to whether new data are generated or not during the optimization process. Among which, online methods are more widely used as a result of promising optimization results. Some cutting-edge research on online SAEAs include [129]: (1) improving model accuracy through surrogate model ensemble, (2) enhancing convergence by a combination of local and global surrogate models, (3) taking advantages of advanced machine learning techniques, such as semi-supervised learning, active learning and transfer learning during the whole process of evolutionary search.
Overall, investigation of these methods mentioned above is of promising potential for developing advanced SAEAs of green hull design. However, some details of SAEAs used for hull form optimization need to be further researched, i.e., surrogate construction, surrogate training, model management and base optimizer selection [135]. Particularly, SAEAs are fronted with challenges when dealing with high-dimensional hull form design optimization, such as low surrogate accuracy and high surrogate training time.
6 Conclusion and future directions
This paper analyzes and summarizes various techniques of energy-efficient ship hull form optimization. Also, ship hull form design optimization based on SBD technology and intelligent optimization methods are presented, especially focusing on the latest development of intelligent optimization methods and surrogate model design. Meanwhile, the current development trend of multidisciplinary design optimization and data-driven evolutionary optimization theory research are analyzed to provide more guidance for its development in ship hull form design optimization research. Based on the above analysis of the developmental status of related research, some challenges are still existing for ship hull form optimization and need to be studied in depth in the future:
-
Deep synergistic optimization of hull form design with other ship performances is of great potential [136, 137]. The coupled synergy of multidisciplinary can be strengthened by multi-objective optimization, i.e., the establishment of a hull form with low energy consumption, low impedance, good endurance, and high robustness.
-
To further explore intelligent optimization algorithms based on multi-fidelity surrogate models for hull form design. Multi-fidelity surrogate models can guarantee both high efficiency and high accuracy, but they have not been widely used in the optimization of hydrodynamic performance of ship hull forms.
-
The uncertainties of numerical computation, real complex maritime conditions and ship operations need to be considered into optimization. Multidisciplinary domain knowledge of hull design can be integrated with machine learning algorithms driven by collected sample data. We should conduct in-depth research on constructing a hybrid knowledge-driven and data-driven optimization method for more energy-efficient hull form design.
Data availability
No datasets were generated or analyzed during the current study.
References
Trivyza, N. L., Rentizelas, A., Theotokatos, G., & Boulougouris, E. (2022). Decision support methods for sustainable ship energy systems: A state-of-the-art review. Energy, 239, 122288.
Frangopoulos, C. A. (2020). Developments, trends, and challenges in optimization of ship energy systems. Applied Sciences, 10, 4639.
Esmailian, E., Gholami, H., Røstvik, H. N., & Menhaj, M. B. (2019). A novel method for optimal performance of ships by simultaneous optimisation of hull-propulsion-bipv systems. Energy Conversion and Management, 197, 111879.
Tadros, M., Ventura, M., & Guedes Soares, C. (2023). Review of the decision support methods used in optimizing ship hulls towards improving energy efficiency. Journal of Marine Science and Engineering, 11, 835.
Chi, Y., & Huang, F. (2016). An overview of simulation-based hydrodynamic design of ship hull forms. Journal of Hydrodynamics. Ser. B, 28, 947–960.
Diez, M., Campana, E. F., & Stern, F. (2018). Stochastic optimization methods for ship resistance and operational efficiency via cfd. Structural and Multidisciplinary Optimization, 57, 735–758.
Zhang, S., Tezdogan, T., Zhang, B., Xu, L., & Lai, Y. (2018). Hull form optimisation in waves based on cfd technique. Ships and Offshore Structures, 13, 149–164.
Lin, Y., Yang, Q., & Guan, G. (2019). Automatic design optimization of swath applying cfd and rsm model. Ocean Engineering, 172, 146–154.
Miao, A., Zhao, M., & Wan, D. (2020). Cfd-based multi-objective optimisation of s60 catamaran considering demihull shape and separation. Applied Ocean Research, 97, 102071.
Nazemian, A., & Ghadimi, P. (2022). Multi-objective optimization of ship hull modification based on resistance and wake field improvement: combination of adjoint solver and cad-cfd-based approach. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 44, 1–27.
Islam, H., Ventura, M., Soares, C. G., Tadros, M. & Abdelwahab, H. (2022). Comparison between empirical and cfd based methods for ship resistance and power prediction. Trends in Maritime Technology and Engineering, 347–357.
Zhang, B., & Zhang, S. (2019). Research on ship design and optimization based on simulation-based design (SBD) Technique. Springer.
Larson, J., Menickelly, M., & Wild, S. M. (2019). Derivative-free optimization methods. Acta Numerica, 28, 287–404.
Serani, A., et al. (2016). Ship hydrodynamic optimization by local hybridization of deterministic derivative-free global algorithms. Applied Ocean Research, 59, 115–128.
Zhao, Z., Liu, S., Zhou, M., You, D., & Guo, X. (2022). Heuristic scheduling of batch production processes based on petri nets and iterated greedy algorithms. IEEE Transactions on Automation Science and Engineering, 19, 251–261.
Zhao, Z., Zhou, M., & Liu, S. (2022). Iterated greedy algorithms for flow-shop scheduling problems: A tutorial. IEEE Transactions on Automation Science and Engineering, 19, 1941–1959.
Esmailian, E., Steen, S., & Koushan, K. (2022). Ship design for real sea states under uncertainty. Ocean Engineering, 266, 113127.
Hu, F., et al. (2022). Conceptual design of a long-range autonomous underwater vehicle based on multidisciplinary optimization framework. Ocean Engineering, 248, 110684.
Zhu, M., Hahn, A., Wen, Y.-Q., & Sun, W.-Q. (2019). Optimized support vector regression algorithm-based modeling of ship dynamics. Applied Ocean Research, 90, 101842.
Qian, J., Mao, X., Wang, X., et al. (2012). Ship hull automated optimization of minimum resistance via cfd and rsm technique. Journal of Ship Mechanics, 16, 36–43.
Kim, H., Choi, J., & Chun, H. (2016). Hull-form optimization using parametric modification functions and particle swarm optimization. Journal of Marine Science and Technology, 21, 129–144.
Hou, Y., You, Y., & Liang, X. (2017). Minimum resistance ship hull uncertainty optimization design based on simulation-based design method. Journal of Shanghai Jiaotong University (Science), 22, 657–663.
Viana, F. A., Gogu, C. & Goel, T. (2021). Surrogate modeling: tricks that endured the test of time and some recent developments. Structural and Multidisciplinary Optimization, 1–28.
Tezdogan, T., et al. (2018). An investigation into fishing boat optimisation using a hybrid algorithm. Ocean Engineering, 167, 204–220.
He, P., Filip, G., Martins, J. R., & Maki, K. J. (2019). Design optimization for self-propulsion of a bulk carrier hull using a discrete adjoint method. Computers & Fluids, 192, 104259.
Zhang, S., Zhang, B., Tezdogan, T., Xu, L., & Lai, Y. (2018). Computational fluid dynamics-based hull form optimization using approximation method. Engineering Applications of Computational Fluid Mechanics, 12, 74–88.
Zong, Z., Hong, Z., Wang, Y., & Hefazi, H. (2018). Hull form optimization of trimaran using self-blending method. Applied Ocean Research, 80, 240–247.
Guan, G., Yang, Q., Wang, Y., Zhou, S., & Zhuang, Z. (2021). Parametric design and optimization of swath for reduced resistance based on evolutionary algorithm. Journal of Marine Science and Technology, 26, 54–70.
Luo, W., Guo, X., Dai, J., & Rao, T. (2021). Hull optimization of an underwater vehicle based on dynamic surrogate model. Ocean Engineering, 230, 109050.
Yang, Q., Lin, Y., & Guan, G. (2020). Improved sequential sampling for meta-modeling promotes design optimization of swath. Ocean Engineering, 198, 106958.
Huang, F., & Chi, Y. (2016). Hull form optimization of a cargo ship for reduced drag. Journal of Hydrodynamics. Ser. B, 28, 173–183.
Coppedè, A., Gaggero, S., Vernengo, G., & Villa, D. (2019). Hydrodynamic shape optimization by high fidelity cfd solver and gaussian process based response surface method. Applied Ocean Research, 90, 101841.
Rafiee, A., Haase, M., & Malcolm, A. (2022). Multi-objective bayesian hull form optimisation for high-speed craft. Ocean Engineering, 266, 112688.
Liu, X., Wan, D., & Lei, L. (2023). Multi-fidelity model and reduced-order method for comprehensive hydrodynamic performance optimization and prediction of jbc ship. Ocean Engineering, 267, 113321.
Villa, D., Furcas, F., Pralits, J. O., Vernengo, G., & Gaggero, S. (2021). An effective mesh deformation approach for hull shape design by optimization. Journal of Marine Science and Engineering, 9, 1107.
Çelik, C., Danışman, D. B., Khan, S., & Kaklis, P. (2021). A reduced order data-driven method for resistance prediction and shape optimization of hull vane. Ocean Engineering, 235, 109406.
Wu, J., Liu, X., Zhao, M., & Wan, D. (2017). Neumann-michell theory-based multi-objective optimization of hull form for a naval surface combatant. Applied Ocean Research, 63, 129–141.
Liu, X., Zhao, W., & Wan, D. (2021). Hull form optimization based on calm-water wave drag with or without generating bulbous bow. Applied Ocean Research, 116, 102861.
Liu, Z., Zhao, W., & Wan, D. (2022). Resistance and wake distortion optimization of jbc considering ship-propeller interaction. Ocean Engineering, 244, 110376.
Ao, Y., Duan, H., & Li, S. (2024). An integrated-hull design assisted by artificial intelligence-aided design method. Computers & Structures, 297, 107320.
Peng, C., Huang, X., Wu, Y., & Kang, J. (2022). Constrained multi-objective optimization for uav-enabled mobile edge computing: Offloading optimization and path planning. IEEE Wireless Communications Letters, 11, 861–865.
Wang, S., Duan, F., Li, Y., Xia, Y., & Li, Z. (2022). An improved radial basis function for marine vehicle hull form representation and optimization. Ocean Engineering, 260, 112000.
Yang, L., Li, S.-Z., Zhao, F., & Ni, Q.-J. (2018). An integrated optimization design of a fishing ship hullform at different speeds. Journal of Hydrodynamics, 30, 1174–1181.
Ni, Q., Ruan, W., Li, S., & Zhao, F. (2020). Multiple speed integrated optimization design for a swath using sbd technique. Journal of Marine Science and Technology, 25, 185–195.
Li, S., Zhu, F., Hou, X. & Ni, Q. (2022). Application of mesh deformation and adaptive method in hullform design optimization. Journal of Marine Science and Technology, 1–10.
Hamed, A. (2022). Multi-objective optimization method of trimaran hull form for resistance reduction and propeller intake flow improvement. Ocean Engineering, 244, 110352.
Wang, P., Chen, Z., & Feng, Y. (2021). Many-objective optimization for a deep-sea aquaculture vessel based on an improved rbf neural network surrogate model. Journal of Marine Science and Technology, 26, 582–605.
Zha, L., Zhu, R., Hong, L., & Huang, S. (2021). Hull form optimization for reduced calm-water resistance and improved vertical motion performance in irregular head waves. Ocean Engineering, 233, 109208.
Cheng, X., Feng, B., Liu, Z., & Chang, H. (2018). Hull surface modification for ship resistance performance optimization based on delaunay triangulation. Ocean Engineering, 153, 333–344.
Ichinose, Y. (2022). Method involving shape-morphing of multiple hull forms aimed at organizing and visualizing the propulsive performance of optimal ship designs. Ocean Engineering, 263, 112355.
D’Agostino, D., Serani, A., & Diez, M. (2020). Design-space assessment and dimensionality reduction: An off-line method for shape reparameterization in simulation-based optimization. Ocean Engineering, 197, 106852.
Zheng, Q., Feng, B.-W., Chang, H.-C., & Liu, Z.-Y. (2021). Dynamic space reduction optimization framework and its application in hull form optimization. Applied Ocean Research, 114, 102812.
Khan, S., Kaklis, P., Serani, A., Diez, M., & Kostas, K. (2022). Shape-supervised dimension reduction: Extracting geometry and physics associated features with geometric moments. Computer-Aided Design, 150, 103327.
Liu, X., Zhao, W., & Wan, D. (2021). Linear reduced order method for design-space dimensionality reduction and flow-field learning in hull form optimization. Ocean Engineering, 237, 109680.
Qiang, Z., Bai-Wei, F., Zu-Yuan, L., Hai-Chao, C., & Xiao, W. (2022). Optimization method for hierarchical space reduction method and its application in hull form optimization. Ocean Engineering, 262, 112108.
Diez, M., Campana, E. F., & Stern, F. (2015). Design-space dimensionality reduction in shape optimization by karhunen-loève expansion. Computer Methods in Applied Mechanics and Engineering, 283, 1525–1544.
Serani, A., Stern, F., Campana, E. F., & Diez, M. (2022). Hull-form stochastic optimization via computational-cost reduction methods. Engineering with Computers, 38, 2245–2269.
Chen, X., et al. (2015). High-fidelity global optimization of shape design by dimensionality reduction, metamodels and deterministic particle swarm. Engineering Optimization, 47, 473–494.
Diez, M., He, W., Campana, E. F., & Stern, F. (2014). Uncertainty quantification of delft catamaran resistance, sinkage and trim for variable froude number and geometry using metamodels, quadrature and karhunen-loève expansion. Journal of Marine Science and Technology, 19, 143–169.
Chang, H., et al. (2023). Research on the karhunen-loève transform method and its application to hull form optimization. Journal of Marine Science and Engineering, 11, 230.
Zhang, Y., Ma, N., Gu, X., & Shi, Q. (2024). Geometric space construction method combined of a spline-skinning based geometric variation method and pca dimensionality reduction for ship hull form optimization. Ocean Engineering, 302, 117604.
Wang, P., Feng, Y., Chen, Z., & Dai, Y. (2023). Study of a hull form optimization system based on a gaussian process regression algorithm and an adaptive sampling strategy, part i: Single-objective optimization. Ocean Engineering, 279, 114502.
Wang, P., Feng, Y., Chen, Z., & Dai, Y. (2023). Study of a hull form optimization system based on a gaussian process regression algorithm and an adaptive sampling strategy, part ii: Multi-objective optimization. Ocean Engineering, 286, 115501.
Zhou, Z., & Zhu, S. (2018). Kernel-based multiobjective clustering algorithm with automatic attribute weighting. Soft Computing, 22, 3685–3709.
Zhu, S., Xu, L., Goodman, E. D., & Lu, Z. (2022). A new many-objective evolutionary algorithm based on generalized pareto dominance. IEEE Transactions on Cybernetics, 52, 7776–7790.
Zhu, S., & Xu, L. (2018). Many-objective fuzzy centroids clustering algorithm for categorical data. Expert Systems with Applications, 96, 230–248.
Zhu, S., Xu, L., & Goodman, E. D. (2020). Evolutionary multi-objective automatic clustering enhanced with quality metrics and ensemble strategy. Knowledge-Based Systems, 188(105018), 1–21.
Zhu, S., Xu, L., & Goodman, E. D. (2022). Hierarchical topology-based cluster representation for scalable evolutionary multiobjective clustering. IEEE Transactions on Cybernetics, 52, 9846–9860.
Deb, K., Pratap, A., Agarwal, S., & Meyarivan, T. (2002). A fast and elitist multiobjective genetic algorithm: Nsga-ii. IEEE Transactions on Evolutionary Computation, 6, 182–197.
Zhang, Q., & Li, H. (2007). Moea/d: A multiobjective evolutionary algorithm based on decomposition. IEEE Transactions on Evolutionary Computation, 11, 712–731.
Coello, C. A. C., Pulido, G. T., & Lechuga, M. S. (2004). Handling multiple objectives with particle swarm optimization. IEEE Transactions on Evolutionary Computation, 8, 256–279.
Deb, K., & Jain, H. (2013). An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part i: solving problems with box constraints. IEEE Transactions on Evolutionary Computation, 18, 577–601.
Liu, X., Zhao, W., & Wan, D. (2022). Multi-fidelity co-kriging surrogate model for ship hull form optimization. Ocean Engineering, 243, 110239.
Wen, Q., Feng, R., An, X., Chen, Y., & Huang, H. (2022). Optimal design of an autonomous underwater helicopter’s shape based on combinatorial optimization strategy. Ocean Engineering, 266, 113015.
Yang, M., Wang, Y., Liang, Y., & Wang, C. (2022). A new approach to system design optimization of underwater gliders. IEEE/ASME Transactions on Mechatronics, 27, 3494–3505.
Huang, F., Wang, L., & Yang, C. (2016). A new improved artificial bee colony algorithm for ship hull form optimization. Engineering Optimization, 48, 672–686.
Wang, P., Wang, F., Chen, Z., & Dai, Y. (2021). Aerodynamic optimization of a luxury cruise ship based on a many-objective optimization system. Ocean Engineering, 236, 109438.
Zhang, S. (2022). Research on the deep learning technology in the hull form optimization problem. Journal of Marine Science and Engineering, 10, 1735.
Wu, J.-H., Zhen, X.-W., Liu, G., & Huang, Y. (2021). Uncertain multidisciplinary design optimization on next generation subsea production system by using surrogate model and interval method. China Ocean Engineering, 35, 609–621.
Diez, M., & Peri, D. (2010). Robust optimization for ship conceptual design. Ocean Engineering, 37, 966–977.
Wei, X., Chang, H., Feng, B., Liu, Z., & Huang, C. (2019). Hull form reliability-based robust design optimization combining polynomial chaos expansion and maximum entropy method. Applied Ocean Research, 90, 101860.
Serani, A., et al. (2016). Parameter selection in synchronous and asynchronous deterministic particle swarm optimization for ship hydrodynamics problems. Applied Soft Computing, 49, 313–334.
Cheng, X., Feng, B., Chang, H., Liu, Z., & Zhan, C. (2019). Multi-objective optimisation of ship resistance performance based on cfd. Journal of Marine Science and Technology, 24, 152–165.
Skoupas, S., Zaraphonitis, G., & Papanikolaou, A. (2019). Parametric design and optimisation of high-speed ro-ro passenger ships. Ocean Engineering, 189, 106346.
Wan, Y., et al. (2022). Interval optimization design of a submersible surface ship form considering the uncertainty of surrogate model. Ocean Engineering, 263, 112262.
Miao, A., & Wan, D. (2020). Hull form optimization based on an nm+ cfd integrated method for kcs. International Journal of Computational Methods, 17, 2050008.
Guan, G., Zhuang, Z., Yang, Q., Wang, P., & Jin, S. (2022). Hull form optimization design of swath with combination evaluations of resistance and seakeeping performance. Ocean Engineering, 264, 112513.
Guo, J., Zhang, Y., Chen, Z., & Feng, Y. (2020). Cfd-based multi-objective optimization of a waterjet-propelled trimaran. Ocean Engineering, 195, 106755.
Jung, Y.-W., & Kim, Y. (2019). Hull form optimization in the conceptual design stage considering operational efficiency in waves. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 233, 745–759.
Feng, Y., et al. (2018). Multidisciplinary optimization of an offshore aquaculture vessel hull form based on the support vector regression surrogate model. Ocean Engineering, 166, 145–158.
Mao, Y., Wang, T., Duan, M., & Men, H. (2022). Multi-objective optimization of semi-submersible platforms based on a support vector machine with grid search optimized mixed kernels surrogate model. Ocean Engineering, 260, 112077.
Liu, X., Yuan, Q., Zhao, M., Cui, W., & Ge, T. (2017). Multiple objective multidisciplinary design optimization of heavier-than-water underwater vehicle using cfd and approximation model. Journal of Marine Science and Technology, 22, 135–148.
Lin, Y., He, J., & Li, K. (2018). Hull form design optimization of twin-skeg fishing vessel for minimum resistance based on surrogate model. Advances in Engineering Software, 123, 38–50.
Mittendorf, M., & Papanikolaou, A. D. (2021). Hydrodynamic hull form optimization of fast catamarans using surrogate models. Ship Technology Research, 68, 14–26.
Tian, X., et al. (2021). Multi-objective optimization of the hull form for the semi-submersible medical platform. Ocean Engineering, 230, 109038.
Alam, K., Ray, T., & Anavatti, S. G. (2015). Design optimization of an unmanned underwater vehicle using low-and high-fidelity models. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 47, 2794–2808.
Pellegrini, R., et al. (2017). Formulation and parameter selection of multi-objective deterministic particle swarm for simulation-based optimization. Applied Soft Computing, 58, 714–731.
Zakerdoost, H., & Ghassemi, H. (2019). A multi-level optimization technique based on fuel consumption and energy index in early-stage ship design. Structural and Multidisciplinary Optimization, 59, 1417–1438.
Jiang, C., Yang, S., Nie, P., & Xiang, X. (2023). Multi-objective structural profile optimization of ships based on improved artificial bee colony algorithm and structural component library. Ocean Engineering, 283, 115124.
Chen, H., Li, W., Cui, W., Yang, P., & Chen, L. (2021). Multi-objective multidisciplinary design optimization of a robotic fish system. Journal of marine science and engineering, 9, 478.
Nazemian, A., & Ghadimi, P. (2021). Cfd-based optimization of a displacement trimaran hull for improving its calm water and wavy condition resistance. Applied Ocean Research, 113, 102729.
Tahara, Y., Peri, D., Campana, E. F., & Stern, F. (2008). Computational fluid dynamics-based multiobjective optimization of a surface combatant using a global optimization method. Journal of Marine Science and Technology, 13, 95–116.
Tahara, Y., Peri, D., Campana, E. F., & Stern, F. (2011). Single-and multiobjective design optimization of a fast multihull ship: numerical and experimental results. Journal of Marine Science and Technology, 16, 412–433.
Chang, H., Cheng, X., Liu, Z., Feng, B., & Zhan, C. (2016). Sample selection method for ship resistance performance optimization based on approximated model. Journal of Ship Research, 60, 1–13.
Gaggero, S., Vernengo, G., & Villa, D. (2022). A marine propeller design method based on two-fidelity data levels. Applied Ocean Research, 123, 103156.
Volpi, S., et al. (2015). Development and validation of a dynamic metamodel based on stochastic radial basis functions and uncertainty quantification. Structural and Multidisciplinary Optimization, 51, 347–368.
Ouyang, X., et al. (2023). Application of an improved maximum entropy sampling method in hull form optimization. Ocean Engineering, 270, 112702.
Ye, Y., Wang, Z., & Zhang, X. (2020). An optimal pointwise weighted ensemble of surrogates based on minimization of local mean square error. Structural and Multidisciplinary Optimization, 62, 529–542.
Renaud, P., Sacher, M., & Scolan, Y.-M. (2022). Multi-objective hull form optimization of a swath configuration using surrogate models. Ocean Engineering, 256, 111209.
Furcas, F., Vernengo, G., Villa, D., & Gaggero, S. (2020). Design of wake equalizing ducts using ranse-based sbdo. Applied Ocean Research, 97, 102087.
Peri, D., Rossetti, M., & Campana, E. F. (2001). Design optimization of ship hulls via cfd techniques. Journal of Ship Research, 45, 140–149.
Wang, S. & Kim, Y. (2024). Cfd-based hull optimization in calm water using adaptive grid deformation method. Journal of Hydrodynamics, 1–22.
Kang, Y., Pei, Z., Ao, L., & Wu, W. (2024). Reliability-based design optimization of river-sea-going ship based on agent model technology. Marine Structures, 94, 103561.
Leotardi, C., Serani, A., Iemma, U., Campana, E. F., & Diez, M. (2016). A variable-accuracy metamodel-based architecture for global mdo under uncertainty. Structural and Multidisciplinary Optimization, 54, 573–593.
Diez, M., et al. (2015). Multi-objective hydrodynamic optimization of the dtmb 5415 for resistance and seakeeping. In SNAME International Conference on Fast Sea Transportation, D021S005R012 (SNAME).
Li, S.-Z., Zhao, F., & Ni, Q.-J. (2014). Bow and stern shape integrated optimization for a full ship by a simulation-based design technique. Journal of Ship Research, 58, 83–96.
Pellegrini, R., et al. (2022). A multi-fidelity active learning method for global design optimization problems with noisy evaluations. Engineering with Computers, 1–24.
Piazzola, C., et al. (2023). Comparing multi-index stochastic collocation and multi-fidelity stochastic radial basis functions for forward uncertainty quantification of ship resistance. Engineering with Computers, 39, 2209–2237.
Pellegrini, R., et al. (2023). Multi-fidelity hydrodynamic analysis of an autonomous surface vehicle at surveying speed in deep water subject to variable payload. Ocean Engineering, 271, 113529.
Goel, T., Haftka, R. T., Shyy, W., & Queipo, N. V. (2007). Ensemble of surrogates. Structural and Multidisciplinary Optimization, 33, 199–216.
Zhang, D., Wang, Z., Ling, H., & Zhu, X. (2021). Kriging-based shape optimization framework for blended-wing-body underwater glider with nurbs-based parametrization. Ocean Engineering, 219, 108212.
Hou, Y. H. (2017). Hull form uncertainty optimization design for minimum eeoi with influence of different speed perturbation types. Ocean Engineering, 140, 66–72.
Zhang, S., Tezdogan, T., Zhang, B., & Lin, L. (2021). Research on the hull form optimization using the surrogate models. Engineering Applications of Computational Fluid Mechanics, 15, 747–761.
Martins, J. R., & Lambe, A. B. (2013). Multidisciplinary design optimization: a survey of architectures. AIAA Journal, 51, 2049–2075.
Li, H., Wei, X., Liu, Z., Feng, B., & Zheng, Q. (2023). Ship design optimization with mixed uncertainty based on evidence theory. Ocean Engineering, 279, 114554.
Diez, M., Peri, D., Fasano, G. & Campana, E. F. (2010). Multidisciplinary robust optimization for ship design. In 28th symposium on naval hydrodynamic, Pasadena, Caloifornia, USA.
Guo, D., Jin, Y., Ding, J., & Chai, T. (2018). Heterogeneous ensemble-based infill criterion for evolutionary multiobjective optimization of expensive problems. IEEE transactions on cybernetics, 49, 1012–1025.
Cui, M., Li, L., Zhou, M., & Abusorrah, A. (2022). Surrogate-assisted autoencoder-embedded evolutionary optimization algorithm to solve high-dimensional expensive problems. IEEE Transactions on Evolutionary Computation, 26, 676–689.
Jin, Y., Wang, H., Chugh, T., Guo, D., & Miettinen, K. (2018). Data-driven evolutionary optimization: An overview and case studies. IEEE Transactions on Evolutionary Computation, 23, 442–458.
Liu, H., Ong, Y.-S., Shen, X., & Cai, J. (2020). When gaussian process meets big data: A review of scalable gps. IEEE transactions on neural networks and learning systems, 31, 4405–4423.
Cui, M., et al. (2022). A bi-population cooperative optimization algorithm assisted by an autoencoder for medium-scale expensive problems. IEEE/CAA Journal of Automatica Sinica, 9, 1952–1966.
Wang, H., & Jin, Y. (2018). A random forest-assisted evolutionary algorithm for data-driven constrained multiobjective combinatorial optimization of trauma systems. IEEE transactions on cybernetics, 50, 536–549.
Bhattacharjee, D., Ghosh, T., Bhola, P., Martinsen, K., & Dan, P. K. (2019). Data-driven surrogate assisted evolutionary optimization of hybrid powertrain for improved fuel economy and performance. Energy, 183, 235–248.
Yuan, Q., Ye, Y., Tang, Y., Liu, Y., & Strbac, G. (2022). A novel deep-learning based surrogate modeling of stochastic electric vehicle traffic user equilibrium in low-carbon electricity-transportation nexus. Applied Energy, 315, 118961.
Zhou, M., et al. (2024). Evolutionary optimization methods for high-dimensional expensive problems: A survey. IEEE/CAA Journal of Automatica Sinica, 11, 1092–1105.
Zhou, Z., et al. (2024). Indicator designing for performance evaluation of collision avoidance algorithms programs on autonomous ships. Ocean Engineering, 295, 116810.
Wang, N., Song, J. & Dong, Q. (2024). Structural design of a wave-adaptive unmanned quadramaran with independent suspension. IEEE Transactions on Intelligent Transportation Systems.
Funding
This work was supported by the Natural Science Foundation of China (Grant Nos. 62206113 and 62073155), the Natural Science Foundation of Jiangsu Province (Grant Nos. BK20221067 and BK20230923), and in part by the High-End Foreign Expert Recruitment Plan (Grant No. G2023144007L).
Author information
Authors and Affiliations
Contributions
Shuwei Zhu wrote the main manuscript text, Ning Sun and Siying Lv prepared figures 1–6, Kaifeng Chen and Leilei Cao checked the English editing, and Shuwei Zhu and Wei Fang provided funding. All authors reviewed the manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhu, S., Sun, N., Lv, S. et al. Research progress on intelligent optimization techniques for energy-efficient design of ship hull forms. J Membr Comput (2024). https://doi.org/10.1007/s41965-024-00169-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41965-024-00169-6