
Abstract
This research deals with the numerical solution of fractional differential equations with delay using the method of steps and shifted Legendre (Chebyshev) collocation method. This article presents a new formula for the fractional derivatives (in the Caputo sense) of shifted Legendre polynomials. With the help of this tool and previous work of the authors, efficient numerical schemes for solving nonlinear continuous fractional delay differential equations are proposed. The proposed schemes transform the nonlinear fractional delay differential equations to a non-delay one by employing the method of steps. Then, the approximate solution is expanded in terms of Legendre (Chebyshev) basis functions. Furthermore, the convergence analysis of the proposed schemes is provided. Several practical model examples are considered to illustrate the efficiency and accuracy of the proposed schemes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Delay differential equations (DDEs) belong to a broader class of functional differential equations. The rate of change of the unknown function at a specific time is represented due to the values of the function at previous times. DDEs are also known as differential-difference equations. Laplace and Condorcet (Chen and Moore 2002) first studied these equations, and naturally, they appear in various fields of science and engineering (Erneux 2009). Fractional delay differential equations (FDDEs) are considered a generalization of DDEs, which contain derivatives of arbitrary fractional order. The integer order differential operator is a local operator, while the fractional-order differential operator is a non-local operator. More precisely, the next state of a system, which is modeled by fractional differential equations (FDEs) depends not only upon its present situation but also upon all of its past positions. The fractional order differential operator enables us to describe a real event more accurately than the classical integer order differential operator. Recently, FDEs and FDDEs are frequently used to model many natural phenomena in the fields of control theory (Si-Ammour et al. 2009), biology (Magin 2010; Dehghan and Salehi 2010), economy Škovránek et al. (2012), and so on.
Because of the computational complexities of fractional delay derivatives, for most of the FDEs and FDDEs, the exact solution is available. Therefore, it is necessary to employ numerical methods for solving such equations. Shakeri and Dehghan (2008) used the homotopy perturbation method for delay differential equations with integer order derivatives. The variational iteration method is considered by Saadatmandi and Dehghan (2009) to obtain the numerical solution of the generalized pantograph equation. Moghaddam and Mostaghim (2013), Parsa Moghaddam and Salamat Mostaghim (2017) introduced numerical methods in the framework of the finite difference method for solving FDDEs. They also presented a matrix approach using the fractional finite difference method for solving nonlinear FDDEs (Moghaddam and Mostaghim 2014). Prakash et al. (2016) proposed a numerical algorithm based on a modified He-Laplace method for solving nonlinear FDDEs. Wang (2013) combined the Adams-Bashforth-Moulton method with the linear interpolation method to find an approximate solution for FDDEs. Mohammed and Khlaif (2014) applied the Adomian decomposition method to get the numerical solution of FDDEs. Mousa-Abadian and Momeni-Masuleh proposed a numerical scheme for solving linear fractional delay differential systems (Mousa-Abadian and Momeni-Masuleh 2021). Their scheme employs the method of steps to handle the delay term and the Chebyshev-Tau method to construct the approximate solution. Sedaghat et al. (2012) introduced a numerical scheme using Chebyshev polynomials for solving FDDEs of pantograph type. Saeed et al. (2015) developed Chebyshev wavelet methods for solving FDDEs. Khader (2013) derived an approximate formula of the Laguerre polynomials for the numerical treatment of FDDEs. Daftardar-Gejji et al. (2015) extended a new predictor-corrector method to solve FDDEs. Parsa Moghaddam et al. (2016) developed a numerical method based on the Adams-Bashforth-Moulton method for solving variable-order FDDEs. Yaghoobi et al. (2017) devised a numerical scheme based on a cubic spline interpolation for solving variable-order FDDEs. Khosravian-Arab et al. (2017) developed new Lagrange basis functions to approximate fractional derivatives in unbounded domains. Their approach is based on the pseudo-spectral, Galerkin, and Petrov-Galerkin methods.
A numerical approach to solve nonlinear FDDEs can be a generalization of the method introduced in Ref Mousa-Abadian and Momeni-Masuleh (2021). The Chebyshev collocation method can be considered to solve nonlinear FDDEs. Of course, employing collocation methods are not restricted to use the Chebyshev basis functions, but also the Legendre basis functions can be applied. Therefore, a significant part of this article deals with the solution of nonlinear FDDEs by using a Legendre basis functions. In this paper, we derive a new formula for the fractional derivatives of shifted Legendre polynomials and then present the efficient numerical schemes for solving nonlinear FDDEs.
The remainder of this article proceeds as follows. In the next section, the properties of shifted collocation-type bases are discussed. In Sect. 3, a formula for the fractional derivatives of shifted Legendre basis functions are derived. Section 4 describes mixed steps-collocation schemes for solving nonlinear FDDEs. The convergence analysis of the proposed schemes has been done in Sect. 5. Section 6 concerns applying the proposed schemes to several nonlinear FDDEs. The conclusion is given in Sect. 7.
2 Shifted Collocation-Type Bases
The most common collocation methods are those based on Chebyshev and Legendre basis functions. Properties of shifted Chebyshev basis functions have been investigated in Ref Mousa-Abadian and Momeni-Masuleh (2021). Here, we deduce the properties of shifted Legendre basis functions. The Legendre basis \(L_{{k}}(t)\) for \(k=0, 1, \dots ,\) and \(-1\le t\le 1\), can be defined as the solution of the following ordinary differential equation (Canuto et al. 2006):
which satisfy \(L_{{k}}(\pm 1)=(\pm 1)^k\). For \(k\ge 1\), we have the following recurrence formula:
where \(L_{{0}}(t)=1\) and \(L_{{1}}(t)=t\). The shifted Legendre basis functions are defined on the interval \([\alpha ,\beta ]\) using the change of variable \(t=\frac{2}{\beta -\alpha }(x-\beta )+1\). For simplicity, let us denote \(L_{{k}}(\frac{2}{\beta -\alpha }(x-\beta )+1)\) by \(L_{{\alpha ,\beta ,k}}(x)\). Therefore, similar to (1), the following recurrence relation can be obtained
The shifted Legendre basis \(L_{{\alpha ,\beta ,k}}(x)\) can be presented in the following form:
By using the identity
the shifted Legendre basis \(L_{{\alpha ,\beta ,k}}(x)\) can be written in terms of a power series in x as
which satisfy \(L_{{\alpha ,\beta ,k}}(\beta )=1\) and \(L_{{\alpha ,\beta ,k}}(\alpha )=(-1)^k\). The next lemma describes integer order derivatives of the shifted Legendre basis functions.
Lemma 1
For \(m\le j\le n\), we have
Proof
The proof is easily obtained from Eq. (4).
The shifted Legendre polynomials satisfy the following relation:
i.e., they are orthogonal with each other concerning the unit weight function. The shifted Legendre basis functions form an orthogonal system of polynomials, which is complete in the space of square-integrable functions, i.e., \({\mathscr {L}}^2(\alpha , \beta )\). Therefore, any \(u\in {\mathscr {L}}^2(\alpha ,\beta )\) can be written as
where
The associated inner product and norm are given by
and
We define \(H^m(\alpha ,\beta )\) to be the vector space of the functions \(g\in {\mathscr {L}}^2(\alpha , \beta )\) such that all distributional derivatives of f of the order up to m can be represented by functions in \({\mathscr {L}}^2(\alpha , \beta )\). \(H^m(\alpha ,\beta )\) is endowed with the norm
Furthermore, the associated semi-norm is defined as follows
where N is the number of nodal bases.
Hereafter, we will use the Gaussian integration formula to approximate integrals such as
Explicit formulas for the quadrature nodes and weights for discrete shifted Chebyshev and Legendre basis functions are Daftardar-Gejji et al. (2015)
-
Chebyshev Gauss-Lobatto
For \(j=0,1,\cdots ,N\),
$$\begin{aligned} x_{{\alpha , \beta , N, j}}=\frac{\beta -\alpha }{2}(x_{{N, j}}-1)+\beta , w_{{\alpha , \beta , N, j}}= {\left\{ \begin{array}{ll} \frac{\pi }{2N},&{}j=0, N,\\ \frac{\pi }{N},&{}j=1,\cdots ,N-1, \end{array}\right. } \end{aligned}$$(8)where
$$\begin{aligned} x_{{N, j}}=\cos \frac{j\pi }{N}. \end{aligned}$$ -
Legendre Gauss-Lobatto
$$\begin{aligned} x_{{\alpha , \beta , 0}}=\alpha ,\, x_{{\alpha , \beta , N}}=\beta ,\, x_{{\alpha , \beta , j}} (j=1, 2, \cdots , N-1){ \text{ roots } \text{ of } } L^{'}_{{\alpha ,\beta ,N}}(x), \end{aligned}$$(9)and
$$\begin{aligned} w_{{\alpha ,\beta ,N,j}}=\frac{2}{N(N+1)[L_{{\alpha ,\beta ,N}}(x_{{j}})]^2},\quad j=0, 1, \cdots , N. \end{aligned}$$
For any \(p(x)\in \mathbb {P}_{2N+1}\), where \(\mathbb {P}_{2N+1}\) is the space of polynomials of degree at most \(2N+1\), we have
3 Fractional Derivatives of Collocation Bases
The shifted Chebyshev basis functions’ fractional derivatives have been discussed in Bhrawy et al. (2017). This section continues to obtain a novel formula for fractional derivatives of shifted Legendre basis \(L_{{\alpha ,\beta ,n}}(x)\) in the Caputo sense (Podlubny 1999). Similar to the shifted Chebyshev basis functions (Mousa-Abadian and Momeni-Masuleh 2021), one can find the following lemma and theorem.
Lemma 2
Let \(\nu\) be a positive real number. Then, the fractional derivative of order \(\nu\) of shifted Legendre polynomials \(L_{{\alpha ,\beta ,n}}(x)\) can be given by
Theorem 1
The fractional derivative of order \(\nu\) of the shifted Legendre basis functions are
where the ceiling function \(\lceil \nu \rceil\) stands for the smallest integer greater than or equal to \(\nu\) and
in which
Proof
As we know, the Caputo fractional derivative of \(x^k\) of order \(\nu\) is
Considering (4), for \(n=\lceil \nu \rceil , \lceil \nu \rceil +1, \cdots ,\) we obtain
By expanding \(x^{j-\nu }\) in terms of the shifted Legendre basis functions, we arrive at the following form:
where \(c_{ij}\) is given in (13), which completes the proof. \(\square\)
4 Mixed Steps-Collocation Schemes
In this section, we propose new numerical schemes based on the method of steps and Legendre (Chebyshev) collocation method to solve the following nonlinear FDDE
where \(\lambda _i\), \(A_j\in \mathbb {R}\) are constants and \(A_n\ne 0\), \(0<\nu _1<\nu _2<\cdots<\nu _l<\nu\), \(m-1<\nu \le m\) are real constants, \(D^\nu u(t)\equiv u^{\nu }(t)\) represents the Caputo fractional derivative of order \(\nu\) of function u(t), \(\mu =\max \{m, n\}\) and the function f is given nonlinear continuous function in u that satisfies the following Lipschitz conditions
Also, throughout this paper, we shall assume the initial function \(\phi (t)\) to be continuous on \([-\tau ,0]\). These conditions guarantee the existence and uniqueness of the solution of the problem (14) (see, e.g., Choudhary and Daftardar-Gejji 2015; Yang and Cao 2013).
Clearly, for \(t\in [0,\tau ]\), the nonlinear FDDE (14) equals the following nonlinear non-delay FDEs:
One way of solving the nonlinear FDE (17) is to use shifted Chebyshev basis functions, which is an extension of the scheme presented in Ref Mousa-Abadian and Momeni-Masuleh (2021). Another way is to expand the approximate solution \(u_{{N}}(t)\) in terms of truncated shifted Legendre basis functions. The latter idea leads to
where \(a_{{k}}\in \mathbb {R}\) are the unknown coefficients that find them. Thanks to Theorem 1, we can express the derivative \(u^{(1)}(t)\), \(u^{(2)}(t)\), \(\cdots , u^{(n)}(t)\), \(D^\nu u(t)\), \(D^{\nu _1}u(t)\), \(D^{\nu _2}u(t), \cdots , D^{\nu _l}u(t)\) in terms of unknown coefficients \(a_{{k}}\).
Now, we employ the Legendre (Chebyshev) collocation method to solve (17) numerically. To do this, the following equation:
must be satisfied with the shifted Legendre collocation nodes (9) (shifted Chebyshev collocation nodes (8)) exactly. In fact, by using (11) and (18), for \(j=0, 1, \cdots , N-\mu\), we get the following equations:
where \(t_{{\alpha , \beta , j}}\) are the same as \(x_{{\alpha , \beta , j}}\), which are defined by (9). After imposing the initial conditions
we arrive at a nonlinear system of algebraic equations. Similarly, using Theorem 1 in Ref Mousa-Abadian and Momeni-Masuleh (2021) and related shifted Chebyshev expansion; we obtain an algebraic system of nonlinear equations. The nonlinear resulting systems can be solved, for example, by Newton’s method. Therefore, the approximate solution \(u_{{N}}\) in the interval \([0, \tau ]\) is now available. To obtain the approximate solution of Eq. (14) in \([\tau , 2\tau ]\), the presented procedure is used. Generally, if we want to solve Eq. (14) in the interval \([(i-1)\tau , i\tau ]\), \(i\ge 1\), we should solve the following equation:
where \(A_j\in \mathbb {R}\) are constants and \(A_n\ne 0\); for \(k\ge 1\) we have \(t\in \varOmega _k=[(k-1)\tau , k\tau ]\), \(u\in C^{\mu }(\varOmega _k)\), \(m-1<\nu <m\), \(m_p-1< \nu _p<m_p<m\), \(\mu =\max \{m, n\}\), \(u^{(j)}(t)=\frac{d^j}{dt^j}u(t)\), with the initial conditions
and
Using the proposed procedure, we get the approximate solution \({_{{(i)}}}u_{{N}}\) of Eq. (22).
5 Convergence Analysis
In this section, similarly presented in Ref Ghoreishi and Yazdani (2011), we show that the obtained approximate solutions in the previous section are convergent to the exact solutions. To investigate the exponential rate of convergence of the proposed schemes, we consider the nonlinear FDDE (22) on the interval \(\varOmega _i=[(i-1)\tau , i\tau ]\).
Let us define \({_{{(i)}}}e_{{N}}(t)={_{{(i)}}}u_{{N}}(t)-{_{{(i)}}}u(t)\) to be the error function of the proposed scheme, where \({_{{(i)}}}u(t)\) and \({_{{(i)}}}u_{{N}}(t)\) are the exact and Legendre (Chebyshev) collocation solution of (22) at the \(i-th\) step, respectively.
Hereafter, we use the subscript w for the Legendre and Chebyshev weight functions. The orthogonal projection operator \(P_{{N}}\) from \({\mathscr {L}}_{{w}}^2(\varOmega )\) onto \(\mathbb {P}_{{N}}\), where \(\varOmega =[\alpha , \beta ]\), satisfies
for any function f in \({\mathscr {L}}_{{w}}^2(\varOmega )\). \(P_{{N}}\) belongs to \(\mathbb {P}_{{N}}\).
The following inequalities for the shifted Legendre (Chebyshev) polynomials and shifted Legendre (Chebyshev)-Gauss-Lobatto nodes for \(k\ge 1\) can be obtained by a similar argument provided in Ref Canuto et al. (2006)
where \(y\in H_w^k(\varOmega )\). Now, we present the convergence theorem of the proposed schemes.
Theorem 2
Suppose that the exact solution \({_{{(i)}}}u(t)\) at the \(i-th\) step of Eq. (22) is smooth enough, i.e. \({_{{(i)}}}u(t)\in H^k_w(\varOmega )\) for \(i, k\ge 1\), and the corresponding mixed steps-collocation solution \({_{{(i)}}}u_{{N}}(t)\) is given by shifted Legendre or Chebyshev basis functions. Then for sufficiently large N, we have
where
and the constants \(C_i\) are independent of N and depend only on n, m, and \(\nu\).
Proof
As \({_{{(i)}}}u_{{N}}(t)\) is the mixed steps-collocation solution of Eq. (22) on the interval \(\varOmega _i\), it satisfies the following equation
By n-times integration of the above expression, we have
We can rewrite each multiple integral in (25) as a single integral
where \(Q_0(t)\) contains initial conditions. Similarly, the exact solution \({_{{(i)}}}u(t)\) satisfies the following relation:
Subtracting (27) from (26) leads to
where
and
After \((n-1)\)-times integrating by parts of the fourth and sixth term on the left-hand side of (28), we get
and
Now we consider the three cases:
-
(i) \(m\ge 4\) and \(m_p\ge 4\),
-
(ii) \(m\ge 4\) and \(m_p\le 4\),
-
(iii) \(m\le 4\).
Case (i): \((m-3)\)-times integrating by parts of the right-hand side of equations (29) and (30), for \(n+1>\nu\), gives
and
Substituting the right-hand side of (31) into the right-hand side of (29), we obtain
and similarly, from equations (30) and (32), we have
Substituting (33) and (34) into (28), we arrive at
where \(\gamma _i\) are independent of N and depend on n, m, \(m_p\), and \(\nu\). By the Gronwall lemma (Wang 2013), we get
where \(\gamma _7,\cdots ,\gamma _{11}\) are some constants related to \(\gamma _1,\cdots ,\gamma _6\).
From Lipschitz conditions (15) and (16), inequality (23) and generalized Hardy’s inequality (Gogatishvill and Lang 1999), we obtain
where \(\gamma _{12},\cdots ,\gamma _{15}\) are some constants related to \(\gamma _7,\cdots ,\gamma _{11}\) and are independent of N. From (23) we get
and
where \(\gamma _{16},\cdots ,\gamma _{19}\) did not depend on N. From (23) we have
Linear operators \(D^\nu :\mathbb {P}_N\rightarrow \mathbb {P}_N^\nu\) and \(D^{\nu _p}:\mathbb {P}_N\rightarrow \mathbb {P}_N^{\nu _p}\) are bounded (see Ref Mousa-Abadian and Momeni-Masuleh (2021)) so that the constants \(C_{10}\) and \(C_{11}^p\) can be found such that
and
Therefore, from (39) and (41), we have
Since \(u_{{N}}=P_{{N}}u\), we can write
So that
From Eqs. (36)–(45), for \(m\ge 4\) and \(m_p\ge 4\), we have
where \(C_1,\cdots , C_5\) are constants related to earlier \(\gamma _i\)’s and \(C_i\)’s.
The same argument can be applied to cases (ii) and (iii) by assuming that \(n+1>\nu\), \(m_p-\nu _p+n>2\), and \(m-\nu +n>2\) respectively. \(\square\)
6 Numerical Results
In this section, we consider several practical examples that, in general, do not have an exact solution. The computational codes were conducted on an Intel (R) Core (TM) i7-6700 K processor, equipped with 8 GB of RAM. Also, We use the fix-point iteration method for solving nonlinear systems, and the stopping criterion is set to be \(10^{-15}\). In all tables SLBF stands for Shifted Legendre basis functions, while SCBF represents Shifted Chebyshev basis functions.
Example 1
Consider the following FDDE
with the boundary condition
where \(\tau\) is taken as a fraction of the length of time interval [0, 1]. Now, two cases for the forcing term h(t) can be considered:
Case (i):
which corresponding exact solution is
Case (ii):
where
The related exact solution is
Zayernouri et al. (2014) used a Petrov-Galerkin spectral method to solve (46). They employed Reimann-Liouville fractional derivatives while we use Caputo’s fractional derivatives. As we know, these are related together to the following relation (Monje et al. 2010)
where \({_{{R}}}D^{\nu }\) stands for Reimann-Liouville fractional derivative. Since \(u(0)=0\), both fractional derivatives are the same, and consequently, both approximate solutions are comparable. The \(\mathscr {L}^2\)-Error of Case (i) and Case (ii) for \(\tau =0.5\) and different N and \(\nu =0.1\) are reported in Table 1. Compared to the PG spectral presented in Ref Zayernouri et al. (2014), SLBF has the same \(\mathscr {L}^2\)-Error as Petrov-Galerkin spectral method, while SCBF produces much less \(\mathscr {L}^2\)-Error in cases (i) and (ii). As one can observe, results obtained by employing SCBF, are more accurate than the others.
Example 2
Consider the following FDDE (Zayernouri et al. 2014)
with the initial condition
Now, two cases are taken into consideration. Case (i): Take \(A(t)=B(t)=t^2-t^3\). The corresponding exact solution is given in (48). Case (ii): Put \(A(t)=B(t)=\sin (\pi t)\), where the analytical solution is given in (50). The \(\mathscr {L}^2\)-Error of Case (i) and Case (ii) for different values of N, \(\tau =0.5\) and \(\nu =0.1\) are provided in Table 2. The \(\mathscr {L}^2\)-Error of Case (i) in both SLBF and SCFB of the current work is at least of the order \(10^{-13}\) for \(N\ge 11\), while it happened only when \(N\ge 17\) in Ref Zayernouri et al. (2014). In Case (ii), the results are the same as the results of Zayernouri et al. (2014) when employing SLBF, while SCBF produces less \(\mathscr {L}^2\)-Error. Again, those results are obtained by employing SCBF are more accurate than the others.
Example 3
Consider Houseflies model as following Moghaddam and Mostaghim (2013)
with the initial condition
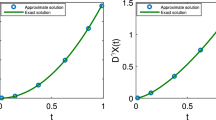
By taking \(c= 1.81\), \(k=0.5107\), \(d=0.147\) and \(z=0.000226\), numerical results of the shifted Chebyshev basis functions for different values of \(\nu\), \(\tau =3\) and \(\tau =5\) are presented in Tables 3 and 4, respectively. Tables 5 and 6 describe the numerical results of the shifted Legendre basis functions with the same parameters. The approximate solutions are sketched in Fig. 1. Comparison between the second and third columns of Tables 3 and 4 (Tables 5 and 6) reveals that the maximum absolute error (MAE) is \(2\times 10^{-6}\) for \(N=15\), while the MAE reported in Ref Moghaddam and Mostaghim (2013), which employed the finite difference method was of the order \(10^{-5}\) using \(N=100\). Moreover, the log plots of MAE for different values of N, \(\tau =3\), and \(\tau =5\) are plotted in Fig. 2.

Approximate solution of Example 3 using the shifted Chebyshev basis functions for \(\tau =3\) (left), and\(\tau =0.5\) (right) with \(N=15\)

Log plot of MAE of Example 3 for \(\tau =3\) (left), and \(\tau =5\) (right) with \(\nu =1\)
Example 4
The following model example concerns the effect of noise on a light, which is introduced by Moghaddam and Mostaghim (2013)
with the initial condition
The obtained results of the shifted Chebyshev basis functions for various values of \(\nu\) and \(\tau\) with \(\epsilon =0.1\) are reported in Tables 7 and 8. Also, the numerical results of the shifted Legendre basis functions are given in Tables 9 and 10. In this model example, the MAEs related to the current works are an order of \(10^{-6}\) using \(N=15\), while the MAE reported in Ref Moghaddam and Mostaghim (2013), which employed the finite difference method achieved this order of accuracy using \(N=100\) nodes. Figure 3 shows the approximate solutions. Also, the log plots of MAE for \(\tau =1\) and \(\tau =3\) are plotted in Fig. 4.

Approximate solution of Example 4 using the shifted Legendre basis functions for \(\tau =1\) (left), and \(\tau =3\) (right) with \(N=15\)

Log plot of MAE of Example 4 for \(\tau =1\) (left), and \(\tau =3\) (right) with \(\nu =1\)
Applying relation (24) of Theorem 2 and using the fact that all the displayed norms are fixed numbers, \(N^{-\frac{3}{2}}\) will be the predominant term. Therefore, we have
Now if we calculate this expression for different values of N, we find that in (54) the value of C for model examples 1–4 is given in Table 11.
Example 5
As a final model example, consider the following FDDE, which is introduced by Parsa Moghaddam and Salamat Mostaghim (2017)
equipped with the conditions
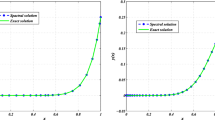
where \(\delta = 0.3\), \(\mu = 1\), \(q = 0.4\) and \(\gamma =0.2\). Computational results of the shifted Legendre basis functions with \(N=15\) and \(\tau =5\) are reported in Tables 13 and 12 demonstrates the results using the shifted Chebyshev basis functions. A comparison between the second and third columns of Tables 12 and 13 show that the present work and the function \(\text {bvp4c}\) of the Matlab software have the same results for at least 4 decimal places. However, the MAE of the finite difference method at \(t=1\) is of the order \(10^{-2}\) (Parsa Moghaddam and Salamat Mostaghim 2017), but in both presented schemes we get the exact results. The graph of the numerical solutions of (55) for different values of \(\nu\) and \(\nu _1\) is sketched in Fig. 5. Assuming that the analytical solution of (55) has two degrees of smoothness, again the predominant term in relation (24) is \(N^{-\frac{3}{2}}\). If we consider \(\text {bvp4c}\) of the Matlab software as a reference solution, then the corresponding \(\mathscr {L}^2\)-Error constant of (54) for SLBF and SCBF is 0.39 and 1.25, respectively.

Approximate solution of Example 5 using the shifted Legendre basis functions with \(N=15\) and \(\tau =5\)
The CPU time of the above examples is reported in Table 14. As we see from the table, the CPU time of the shifted Chebyshev basis functions is less than Legendre one.
7 Conclusion
In this article, a new formula for fractional derivatives of shifted Legendre polynomials is derived. All the fractional derivatives are considered in the Caputo sense. By using the formula and formula based on shifted Chebyshev polynomials for fractional derivatives (Mousa-Abadian and Momeni-Masuleh 2021), the numerical schemes for solving nonlinear FDDEs are proposed. The proposed schemes exploit the method of steps and shifted Legendre (Chebyshev) basis functions to generate an approximate solution. A mathematical analysis shows that the proposed schemes have an exponential rate of convergence. Moreover, practical examples are taken to demonstrate the effectiveness of the obtained results. MAE reveals that the approximate solution has acceptable conformity with the available literature. Further development of the proposed schemes should be concentrated on solving nonlinear fractional delay differential problems with more than one delay. It would also be interesting to extend an approximate solution in which a discontinuous nonlinear f is considered.
References
Bhrawy AH, Zaky MA, Machado JAT (2017) Numerical solution of the two-sided space time fractional telegraph equation via Chebyshev tau approximation. J Optim Theory Appl 174:321–341
Canuto C, Hussaini MY, Quarteroni A, Zang TA (2006) Spectral methods: fundamentals in single domains. Springer-Verlag, Berlin Heidelberg
Chen YQ, Moore KL (2002) Analytical stability bound for delayed second-order systems with repeating poles using Lambert function W. Automatica 38:891–895
Choudhary S, Daftardar-Gejji V (2015) Existence uniqueness theorems for multi-term fractional delay differential equations. Fract Calc Appl Anal 18(5):1113–1127
Daftardar-Gejji V, Sukale Y, Bhalekar S (2015) Solving fractional delay differential equations: a new approach. Fract Calc Appl Anal 18(2):400–418
Dehghan M, Salehi R (2010) Solution of a nonlinear time-delay model in biology via semi-analytical approaches. Comput Phys Commun 181:1255–1265
Erneux T (2009) Applied delay differential equations. Springer-Verlag, New York
Ghoreishi F, Yazdani S (2011) An extension of the spectral Tau method for numerical solution of multi-order fractional differential equations with convergence analysis. Comput Math Appl 61:30–43
Gogatishvill A, Lang J (1999) The generalized hardy operator with kernel and variable integral limits in Banach function spaces. J Inequal Appl 4(1):1–16
Khader MM (2013) The use of generalized Laguerre polynomials in spectral methods for solving fractional delay differential equations. J Comput Nonlinear Dyn 8(4):041018
Khosravian-Arab H, Dehghan M, Eslahchi MR (2017) Fractional spectral and pseudo-spectral methods in unbounded domains: theory and applications. J Comput Phys 338:527–566
Magin RL (2010) Fractional calculus models of complex dynamics in biological tissues. Comput Math Appl 59(5):1586–1593
Moghaddam BP, Mostaghim ZS (2013) A numerical method based on finite difference for solving fractional delay differential equations. J Taibah Univ Sci 7:120–127
Moghaddam BP, Mostaghim ZS (2014) Novel matrix approach to fractional finite difference for solving models based on nonlinear fractional delay differential equations. Ain Shams Eng J 5(2):585–594
Mohammed OH, Khlaif AI (2014) Adomian decomposition method for solving delay differential equations of fractional order. IOSR J Math 10:1–5
Monje CA, Chen Y, Vinagre BM, Xue D, Feliu V (2010) Fractional-order systems and controls: fundamentals and applications, 1st edn. Advances in industrial control. Springer-Verlag, London
Mousa-Abadian M, Momeni-Masuleh SH (2021) Solving linear fractional differential equations with time delay by steps Chebyshev-Tau scheme. Iran J Sci Technol Trans Sci 45:571–583
Parsa Moghaddam B, Salamat Mostaghim Z (2017) Modified finite difference method for solving fractional delay differential equations. Bol Soc Parana Mat 35:49–58
Parsa Moghaddam B, Yaghoobi S, Machado JAT (2016) An extended predictor-corrector algorithm for variable-order fractional delay differential equations. J Comput Nonlinear Dyn 11:061001
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Prakash J, Kothandapani M, Bharathi V (2016) Numerical approximations of nonlinear fractional differential difference equations by using modified He-Laplace method. Alex Eng J 55(1):645–651
Saadatmandi A, Dehghan M (2009) Variational iteration method for solving a generalized pantograph equation. Comput Math Appl 58:2190–2196
Saeed U, ur Rehman M, Iqbal MA (2015) Modified Chebyshev wavelet methods for fractional delay-type equations. Appl Math Comput 264:431–442
Sedaghat S, Ordokhani Y, Dehghan M (2012) Numerical solution of the delay differential equations of pantograph type via Chebyshev polynomials. Commun Nonlinear Sci Numer Simulat 17:4815–4830
Shakeri F, Dehghan M (2008) Solution of delay differential equations via a homotopy perturbation method. Math Comput Model 48:486–498
Si-Ammour A, Djennoune S, Bettayeb M (2009) A sliding mode control for linear fractional systems with input and state delays. Commun Nonlinear Sci Numer Simulat 14(5):2310–2318
Škovránek T, Podlubny I, Petráš I (2012) Modeling of the national economies in state-space: a fractional calculus approach. Econ Model 29(4):1322–1327
Wang Z (2013) A numerical method for delayed fractional-order differential equations. J Appl Math 2013:1–7
Yaghoobi S, Parsa Moghaddam B, Ivaz K (2017) An efficient cubic spline approximation for variable-order fractional differential equations with time delay. Nonlinear Dyn 87:815–826
Yang Z, Cao J (2013) Initial value problems for arbitrary order fractional differential equations with delay. Commun Nonlinear Sci Numer Simulat 18(11):2993–3005
Zayernouri M, Cao W, Zhang Z, Karniadakis GE (2014) Spectral and discontinuous spectral element methods for fractional delay equations. SIAM J Sci Comput 36:B904–B929
Acknowledgements
The authors would like to thank the anonymous reviewers for their valuable comments and suggestions which have helped to improve the quality of the article.
Funding
The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not disclosed any competing interests.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mousa-Abadian, M., Momeni-Masuleh, S.H. On Mixed Steps-Collocation Schemes for Nonlinear Fractional Delay Differential Equations. Iran J Sci 47, 899–914 (2023). https://doi.org/10.1007/s40995-023-01445-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40995-023-01445-3