
Abstract
In this work, a high accurate method is given for solving the nonlinear fractional delay integro-differential equations, numerically. By considering the equation before and after delay time, we first apply the delay function in the equation and propose an equivalent system. By discretization in the Jacobi-Gauss collocation points, an algebraic nonlinear system is then proposed to approximate the solution of main equation. The convergence of method is fully given in spaces \(L^{\infty }_{\omega ^{\alpha ,\beta }}(I)\) and \(L^{2}_{\omega ^{\alpha ,\beta }}(I)\), and the error bounds are specified for obtained approximations. Finally, some numerical examples are provided to show the capability and efficiency of method.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus is a popular branch of mathematics that, in addition to attracting a lot of attention, also appears in various fields of science, medicine, physics, etc. Fractional differential equations (FDEs) are part of mathematical analysis that study derivative and integral operations of fractional order, and as we know, it originated in 1965 by Hopital and then several researchers have analytically and numerically examined different types of these equations. For example, Chouhan et al. [10] constructed generalized fractional Bernoulli wavelet functions to numerically solve the diffusion modelling anomalous infiltration problems using a class of nonlinear FDEs with variable order. They first generated generalized Bernoulli wavelets of fractional order and then extracted the operational integration matrices and used them to convert the FDEs into a system of algebraic equations. In [3], a new kind of wavelet method is proposed for solving the nonlinear FDEs. In this work, Alkhalissi et al. proposed this method based on a generalized Gegenbaur-Humbert polynomial and they obtained operational matrices for fractional and integer order derivatives. Finally, they used these operational matrices to obtain a system of algebraic equations. Mohammadizadeh et al. generated the two unique piecewise \(C^3\)-splines of six and eight degrees to approximately solve the fractional differential integro equations (FDIEs). They proved the uniqueness of the second-order solution to these equations and analysed the convergence analysis and error of their method [23]. Shokri and Mirzaei [33], performed a pseudospectral method based on Lagrange polynomials to numerically investigate the time-FDEs of multi terms. They used a semi-discrete approximate scheme to convert these equations into a system of ordinary FDEs, and also used the Mittag-Leffler function to achieve the accuracy of their method. In [2], the asymptotic optimal homotopy method was generalized to a system of FDIEs. Akbar et al. investigated these equations as test examples and used the least squares method to achieve the optimal values of auxiliary constants. Dehestani et al. [14] combined the Lucas wavelets with Gauss Legendre quadrature rule and used them to solve the fractional differential Volterra Fredholm integral equations. They obtained the operational matrices for the Lucas wavelet functions and utilized them to arrive at their numerical scheme. They also obtained an error bound for their numerical method, which showed good behavior for their method.
Delay differential equations (DDEs) are actually a type of differential equations in which the unknown function can be defined at a specific time and in terms of the function and its derivative at earlier times and places. These equations have wide applications in science and engineering. The genesis of field of DDEs can be seen in Minorsky studies (1941) when examining the motion of a ship. Since ancient times, a lot of research has been done on different types of DDEs, and we will review several numerical methods which such equations investigated. To learn more about DDEs, reader can refer to [5, 6, 8, 15,16,17,18, 20, 34, 35]. In these books, the history of the emergence of DDEs and their different types have been reviewed. Among the works that have been discussed here is the theory and applications of DDEs, various aspects of nonlinear DDEs, and various quantitative theories, including normal forms, centre manifold and Hopf bifurcation theory in finite dimension. Control systems and stability analysis methods, Hopf bifurcations and center manifold analysis, numerical computations of DDE solutions, neural systems, and stochastic DDEs are also covered. Analytical and numerical solutions, existence, uniqueness and regularity of results for very famous classes of these equations, general formulas and convergence results for discrete and continuous methods are presented.
Now, if derivative order in DDEs is fractional, a new type of DDEs, known as the fractional delay differential equations (FDDEs), will emerge. Usman et al. [36] used a new operational matrix method to solve the FDDEs. They applied these matrices to fractional derivatives and integrals using the concept of shifted Gegenbauer polynomials, and finally obtained a system of algebraic equations. In [12], Daftardar-Gejji et al. utilize a method called the new iterative method for solving the nonlinear and linear FDDEs. They obtained their corrector predictor formula by using the fractional Adams method and completed their work by investigating the error analysis of their method under Lipschitz conditions. In [22], Moghaddam et al. used Brownian motion to approximate a class of stochastic FDDEs. They applied quadrature spline of the piecewise integral quadrature to approximate the fractional integral and demonstrated the efficiency of their computational scheme by evaluating the exact solutions using statistical predictors. Agarwal et al. [1], proposed a function called the mild solution of a fractional delay integro-differential equations (FDIDEs). For the existence of mild solutions of a class of these equations, they could expressed sufficient conditions. By using this function, they were able to achieve the application of concrete in the conduction heat in materials with memory. In [31], an operational matrix was formulated for the Tau method and for approximately solving a class of FDIDEs by Shahmorad et al. Dabas and Cahuhan [13] examined the existence and uniqueness of the mild solution of a class of infinite FDIDEs. They used the fixed point technique to achieve their results by using the solution operator in a complex Banach space.
Although many numerical methods have been used to solve the types of FDDEs and FDIDE, we can still feel the absence of an efficient method for solving different classes of these equations with high convergence rate and low error. Here, we propose a new Jacobi-Gauss collocation (JGC) method for solving a class of nonlinear FDIDEs. We totally analyze the convergence of our method in the \(L^{\infty }_{\omega ^{\alpha ,\beta }}(I)\) and \(L^{2}_{\omega ^{\alpha ,\beta }}(I)\) spaces by generalizing the proposed technique in the work [38] for linear FDDEs. The process of implementing the method is that we first convert the original equation into an equivalent time-dependent system and then we discrete the resulting system at JGC points and arrive at a system of algebraic equations that simultaneously gives us the approximate values of the solution and its fractional derivative. By investigate the method error, we find that the error bounds of our method tend to zero by increasing the number of collocation points, and also by providing several numerical examples, we can observe the acceptable results.
This paper is organized as follows: Some basic definitions and notations are provided in Sect. 2. We state the problem and perform our numerical approach in Sect. 3. In Sect. 4, we survey the convergence and error analysis of the method in spaces \(L^{\infty }_{\omega ^{\alpha ,\beta }}(I)\) and \(L^{2}_{\omega ^{\alpha ,\beta }}(I)\) by giving some useful lemmas. In Sect. 5, by presenting some numerical examples, we represent the preference and advantages of proposed method. At last, we present the suggestions conclusions.
2 Preliminaries and notations
In this section, we review some of the preliminary definitions and necessary concepts including the concept of the Caputo fractional derivative, and express the definitions of Jacobi polynomials and required spaces of the issue.
Definition 1
([19, 27]) Suppose that \(g(\cdot )\) is given on [a, b]. The Caputo fractional derivative of \(g(\cdot )\) is expressed as follows
where \(n-1<\gamma <n\) is the order of Caputo derivative, n is a positive integer and \(\Gamma (\cdot )\) shows the Gamma function.
Definition 2
([19, 30]) With the assumptions of definition 1, we have the Riemann-Liouville fractional integral of \(g(\cdot )\) as follows
Remark 2.1
([27, 30]) We can express a useful relation between Caputo derivative and Riemann-Liouville fractional integral as follows
In the following, a useful relation of the fractional calculus is presented, which we use in the numerical section ([7, 20])
where \(\mathbb {N}_0=\{0\}\cup \mathbb {N}\).
Definition 3
([32, 38]) Jacobi polynomials are a class of classical orthogonal polynomials that symbolized by \(P_n^{\gamma ,\alpha }\), and they are orthogonal with respect to weight function \(\omega ^{\gamma ,\alpha }(t)=(1-t)^{\gamma }(1+t)^{\alpha }\) on \(I=[-1,1]\) for \(\gamma ,\alpha \). We can calculated these polynomials by using the following formula
where
Definition 4
([32, 38]) The \(L^p_{\omega ^{\gamma ,\alpha }}(I)\)-space for \(1\le p\le \infty \) is defined as follows
where
Also, \(\{P_n^{\gamma ,\alpha }(t)\}_{n=0}^{\infty }\) constitute a complete orthogonal \(L^2_{\omega ^{\alpha ,\beta }}(I)\) space where \(\{P_n^{\gamma ,\alpha }(t)\}_{n=0}^{\infty }\) is a the set of Jacobi polynomials. We can show the inner product in \(L^2_{\omega ^{\gamma ,\alpha }}(I)\) as follows
Definition 5
([32, 38]) The JG integration formula for JG points \(\{\tau _j^{\gamma ,\alpha }\}_{j=0}^N\) and their corresponding weights \(\{\omega _j^{\gamma ,\alpha }\}_{j=0}^N\) is as follows
where N is a given positive integer.
Definition 6
([32, 38]) Let \(\mathcal {P}_N\) be the space of polynomials of almost N. Then, the Lagrange interpolating polynomial for any \(f\in C(I)\) is defined as follows
where this polynomial is satisfying in \(I_N^{\gamma ,\alpha }f(\tau _j^{\gamma ,\alpha })=f(\tau _j^{\gamma ,\alpha }), 0\le j\le N\) and \(L_j(t),j=0,1,\ldots ,N\) are the Lagrange interpolating basis functions associated with points \(\{\tau _j^{\gamma ,\alpha }\}_{j=0}^N\).
Definition 7
([32]) We can define the Sobolev space \(H^m(I)\) for \(m\in \mathbb {N}\) as follows
This space contains the following semi-norm and norm
Also, a Hilbert space is a space \(H^m(I)\) if equipped with the inner product
and the Sobolev space of weighted Jacobi for \(m\in \mathbb {N}\) can be expressed as follows
and has the following norm
3 Problem statement and implementing
Now, we investigate the following nonlinear FDIDE
where, \(F,G:[0,T]\times \mathbb {R}\times \mathbb {R}\rightarrow \mathbb {R}\) and \(\psi : [0,T]\rightarrow \mathbb {R}\) are given function that are continuously differentiable, \(X:[0,T]\rightarrow \mathbb {R}\) is a unknown function, \(0<\gamma \le 1\) and \(0<\delta <T\) is a specified delay parameter.
In beginning, the above equation converts as follows
Then, we let the change of variables
to exert the Jacobi polynomials. By defining \(v(z)=X(\frac{T}{2}(1+z))\), we got \(v(z-\bar{\delta }-1)=X(t-\delta )\) and then
We use the following Lemma to implementation the method
Lemma 3.1
Consider \(v(z)=X\left( \dfrac{T}{2}(1+z)\right) ,~ z\in (-1,1]\) where \(X:[0,T]\rightarrow \mathbb {R}\) is a given differentiable function. Then for \(t=\dfrac{T}{2}(1+z)\) and any \(z\in (-1,1]\), we have
where \(0<\gamma \le 1\).
Proof
The proof is similar to the Lemma 1 in [26] and Theorem 4.1 in [25]. Let \(z\in (-1,1]\) is given and put \(t=\dfrac{T}{2}(1+z)\). For all \(\tau \in (-1,z]\), define \(\theta =\dfrac{t}{1+z}(1+\tau )\). So \(d\theta =\dfrac{t}{1+z}d\tau \) and hence
and
Now, we use the (15), (16) and (17) for converting (14) into the equivalent form below.
Let \(\Phi (z)={}_{-1}^CD_z^{\gamma }v(z)\). By (2) and (3), we have
Also we see, in the above system, there are two singular integrals. Therefore, for approximate these integrals via JG formula, we utilize \(\vartheta _1(z,\tau )=\frac{1+z}{2}\tau +\frac{z-1}{2}\) and by this, we can convert the above system into the following equivalent form
Assume that \(\alpha =1- \gamma \) and let collocation points \(\{z_i^{-\alpha ,-\alpha }\}_{i=0}^N:\) be the set of JG points with the corresponding weight function \(\omega ^{-\alpha ,-\alpha }\). Define
Therefore,
Now, we use the Gauss quadrature formula to approximate the integrals in (20)
where \(\{\tau _k\}_{k=0}^N\) and \(\{\hat{\tau }_k\}_{k=0}^N\) are two sets of JG points with respect to the weight functions \(\{\omega _k^{0,0}\}_{k=0}^N\) and \(\{\omega _k^{-\alpha ,0}\}_{k=0}^N\).
Finally, we achieve the following system by these relations
where \(\left( v_0,v_1,\ldots ,v_N\right) \) and \(\left( \Phi _0,\Phi _1,\ldots ,\Phi _N\right) \) are the unknown variables and as we see, above system is a nonlinear algebraic system where \(l_{\bar{\delta }}\) satisfies in \(z_{l_{\bar{\delta }}}\le \bar{\delta }<z_{l_{\bar{\delta }}+1}<T\) and we show that we can simultaneously obtain the values of approximate solution and its values of fractional derivatives.
4 Convergence and error analysis
Now, we investigate the error analysis in two spaces \(L^2_{\omega ^{\gamma ,\alpha }}(I)\) and \(L^{\infty }_{\omega ^{\gamma ,\alpha }}(I)\). We begin our work by presenting several Lemmas.
Lemma 4.1
([9, 37]) Assume that \(f\in H^{m,N}_{L^2_{\omega ^{-\alpha ,-\alpha }}(I)}\) and denote by \(I_N^{-\alpha ,-\alpha }f\) its interpolation polynomial associated with the \((N+1)\) JG points \(\{t_j\}_{j=0}^N\), namely, \( I_N^{-\alpha ,-\alpha }f=\sum _{j=0}^Nf(t_j)L(t_j)\). Then the following relations hold for the Chebyshev weight function \(\omega ^{C} =\omega ^{-\frac{1}{2},-\frac{1}{2}}\)
Lemma 4.2
([21]) Let \(\{L_j(t)\}_{j=0}^N\) be the N-th degree Lagrange basis polynomials. Then, the following relation holds for the Gauss points of the Jacobi polynomials
Lemma 4.3
([28, 29]) Let \(||\cdot ||_{p ,q}\) be the standard norm in \(C^{p ,q}(I)\) and assume that \(\mathcal {L}_N\) be a linear operator from space \(C^{p ,q}(I)\) into the space \(\mathcal {P}_N\). Then, there exist a a constant \(C_{p ,q}>0\) for \(q\in (0,1)\) and a non-negative integer p and a polynomial function \(\mathcal {L}_Nf\in \mathcal {P}_N\) for any function \(f\in C^{p ,q}(I)\) such that
Lemma 4.4
([11]) Let \(\alpha \in (0,1)\) and \(K(\cdot ,\cdot )\) be a function. Also, assume that \(\mathcal {J}\) be defined by
Then, we have the following relation for a positive constant \(C_{2,2}\) (may depend on \(||K||_{L^{\infty }(E)}\) and \(||K||_{C^{0,q}}\) for \(E=[-1,1]^2\)) for any function \(f\in C(I)\) such that
under the assumption that \(0<q <1-\alpha \), for any \(t',t''\in I\) and \(t'\ne t''\).
This implies that
Lemma 4.5
([24]) Let \(f(\cdot )\) be a bounded function. Then, due to Lagrange interpolation basis polynomials \(L_j(t),j=0,1,\ldots ,N\) with respect to JGC points \(\{t_j\}_{j=0}^N\), we have
where \(C_{2,2}\) is a constant which is independent of function \(f(\cdot )\).
Theorem 4.1
Let \(v(\cdot )\) is the smooth exact solution for nonlinear FDIDE (19). If \(0<\gamma <1\), \(v\in H_{\omega ^{-\alpha ,-\alpha }}^{m+1}(I)\) and \(\alpha =1-\gamma \), then for the approximate solutions \(v_N(\cdot )\) and \(\Phi _N(\cdot )\) of (24)
where \(C_{1,1} ,C_{3,3}, C_{2,2}\) and \(C_{0,q}\) are constants independent of N and
Proof
By Assuming \(\Phi _N(z)\simeq \sum _{j=0}^N\Phi _j L_j(z)\in \mathcal {P}_N\), we get
where \(\vartheta _1(z_i^{-\alpha ,-\alpha },\tau _k)=\dfrac{z_i^{-\alpha ,-\alpha }+1}{2}\tau _k +\dfrac{z_i^{-\alpha ,-\alpha }-1}{2}\). By approximating (19) at the JG points \(\{z_i^{-\alpha ,-\alpha }\}_{i=1}^N\), we can get
where \(\alpha =1-\gamma \). We have the following by multiplying both sides of (40) by \(L_i(z)\) and then summing from 0 to N
We arrive to the following system by (19)
where \(I^{-\alpha ,-\alpha }_N\) is the Lagrange operator which defined in Lemma 4.1. Now, according to (33)
where
From (43), we have
Now, we get from triangular inequality
where
With a similar process, we conclude from (44) that
Using Lemma 4.2, the relation (48) and Lipschitz condition, we have
We have from Lemma 4.1
By Lemmas 4.1, 4.3 and 4.4, we conclude that

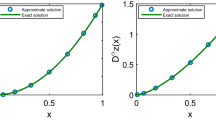
The exact and approximate solution with \(\gamma =0.5\), \(\delta =0.25\) and \(N=5\) for Example 1

The approximate solutions for \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\) for Example 1

The error for \(\gamma =0.8\), \(\delta =0.25\) and \(N=3,5,7\) for Example 1

The error for \(\gamma =0.9,0.99,0.999\), \(\delta =0.25\) and \(N=5\) for Example 1
Note that we employ the Lemma 4.4 under the following assumptions
Now, we give the following relations by Combining (52)-(54) in (48) and (51)
Theorem 4.2
By considering the assumptions of Theorem 4.1, we have
where
Proof
We conclude that from (43) and generalization of the triangular inequality
where
and

The approximate and exact solutions of Example 2 for \(\gamma =0.5\), \(\delta =0.25\) and \(N=5\)

The approximate solutions of Example 2 for \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\)

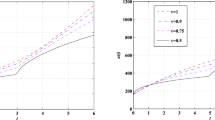
The error of Example 2 for \(\gamma =0.8\), \(\delta =0.25\) and \(N=4,6,8\)

The error of Example 2 for \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\)

The error of Example 2 for \(\gamma =0.5\), \(\delta =0.2,0.4,0.6\) and \(N=5\)
where \(J_1(z)\), \(J_2(z)\) and \(J_3(z)\) are described in (45) and (46). Now, it conclude from (52) that
Using Lemma 4.1, we have
From Lemmas 4.3 and 4.5, it follows that
where \(C_{2,2}\), \(\bar{C}\) and \(C_{0,q}\) are constants, independent of N. As in Theorem 4.1, it follows that
where
where q satisfies (55). The proof is completed by (68)-(75).

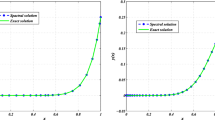
The exact and approximate solutions of Example 3 for \(\gamma =0.5\), \(\delta =1\) and \(N=5\)

The exact and approximate solutions of Example 3 for \(\gamma =0.5,0.7,0.9\), \(\delta =1\) and \(N=5\)

The error of Example 3 for \(\gamma =0.8\), \(\delta =1\) and \(N=4,6,8\)

The error of Example 3 for \(\gamma =0.5,0.7,0.9\), \(\delta =1\) and \(N=5\)

The error of Example 3 for \(\gamma =0.5\), \(\delta =0.5,1,1.5\) and \(N=5\)
5 Numerical examples
At present, we solve several nonlinear FDIDEs by proposed method and show the efficiently of the method. For this, consider the following relations for the exact and approximate solutions \(X^*(\cdot )\) and \(X(\cdot )\) and the exact and approximate derivatives of fractional order \({}_0^CD_t^{\gamma }X^*(\cdot )\) and \({}^C_0D^{\gamma }_tX(\cdot )\)
Example 1
Consider the following nonlinear FDDIE
where \(\psi (t)=t^{2}, t\le 0\). Function \(X(t)=t^{2}\) is the exact solution. In the following, we show the corresponding system of (24) for this example
where \(\vartheta _1(z,\tau )=\frac{1+z}{2}\tau +\frac{z-1}{2}\). The approximate and exact solutions for \(\gamma =0.5\), \(\delta =0.25\) and \(N=5\) are given in Fig. 1. Also, the exact and approximate solutions with \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\) are showed in Figure 2. The error for approximate solutions with \(\gamma =0.8\), \(\delta =0.25\) and \(N=3,5,7\) is illustrate in Fig. 3. The error for approximate solutions with \(\gamma =0.9,0.99,0.999\), \(\delta =0.25\) and \(N=5\) is provided in Fig. 4.
Example 2
Consider the following nonlinear FDIDE
where \(\psi (t)=t^{1+\gamma },-\delta \le t\le 0\). The exact solution is \(X(t)=t^{1+\gamma }\). In Fig. 5, the approximate solutions with \(\gamma =0.5\), \(\delta =0.25\) and \(N=5\) are showed. In Fig. 6, the approximate solutions for \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\) are displayed. In Fig. 7, the error of approximate solutions for \(\gamma =0.8\), \(\delta =0.25\) and \(N=4,6,8\) are demonstrated. As we see in Figure 8, the error of approximate solutions are presented for \(\gamma =0.5,0.7,0.9\), \(\delta =0.25\) and \(N=5\). And finally, the error of approximate solutions are displayed in Fig. 9 for \(\gamma =0.5\), \(\delta =0.2,0.4,0.6\) and \(N=5\).
Example 3
Consider the following nonlinear FDIDE
where \(\psi (t)=t^{2\gamma },-\delta \le t\le 0\). \(X(t)=t^{2\gamma }\) is the exact solution. The approximate and exact solutions for \(\gamma =0.5\), \(\delta = 1\) and \(N=5\) are given in Fig. 10. For \(\gamma =0.5,0.7,0.9\), \(\delta =1\) and \(N=5\), the exact and approximate solutions are demonstrated in Fig. 11. The error with \(\gamma =0.8\), \(N=4,6,8\) and \(\delta =1\) is presented in Fig. 12. The error of approximate solutions for \(\gamma =0.5,0.7,0.9\), \(\delta =1\) and \(N=5\) is showed in Fig. 13. Aslo, The error with \(\gamma =0.5\), \(N=5\) and \(\delta =0.5,1,1.5\) is showed in Fig. 14.
6 Conclusions and suggestions
In this article, we showed that Jacobi-Gauss collocation method can be implemented for solving the nonlinear fractional delay integro-differential equation with a high accuracy. By this method, a system of algebraic equations can be obtained for approximating the solution. Also, we gained the error bounds for approximations in two spaces \(L^{\infty }_{\omega ^{\alpha ,\beta }}(I)\) and \(L^{2}_{\omega ^{\alpha ,\beta }}(I)\), and illustrated the capability of presented method in numerical simulations.
We will extended the presented method and its convergence analysis for other types of fractional delay problems including nonlinear fractional delay singular integro-differential equations and fractional delay partial differential equations.
References
Agarwal, R. P., de Andrade, B., & Siracusa, G. (2011). On fractional integro-differential equations with state-dependent delay. Computers & Mathematics with Applications, 62(3), 1143-1149.
Akbar, M., Nawaz, R., Ahsan, S., Nisar, K. S., Abdel-Aty, A. H., & Eleuch, H. (2020). New approach to approximate the solution for the system of fractional order Volterra integro-differential equations. Results in Physics, 19, 103453.
Alkhalissi, J. H., Emiroglu, I., Bayram, M., Secer, A., & Tasci, F. (2021). A new operational matrix of fractional derivative based on the generalized Gegenbauer-Humbert polynomials to solve fractional differential equations. Alexandria Engineering Journal, 60(4), 3509-3519.
Antman, S., Marsden, J., & Sirovich, L. (2007). Surveys and Tutorials in the Applied Mathematical Sciences.
Bellen, A., & Zennaro, M. (2013). Numerical methods for delay differential equations. Oxford university press.
Balachandran, B., Kalmár-Nagy, T., & Gilsinn, D. E. (2009). Delay differential equations. Berlin: Springer.
Borisut, P., Kumam, P., Ahmed, I., & Sitthithakerngkiet, K. (2019). Nonlinear Caputo fractional derivative with nonlocal riemann-liouville fractional integral condition via fixed point theorems. Symmetry, 11(6), 829.
Breda, D., Maset, S., & Vermiglio, R. (2014). Stability of linear delay differential equations: A numerical approach with MATLAB. Springer.
Canuto, C., Hussaini, M. Y., Quarteroni, A., & Zang, T. A. (2007). Spectral methods: fundamentals in single domains. Springer Science & Business Media.
Chouhan, D., Mishra, V., & Srivastava, H. M. (2021). Bernoulli wavelet method for numerical solution of anomalous infiltration and diffusion modeling by nonlinear fractional differential equations of variable order. Results in Applied Mathematics, 10, 100146.
Colton, D. L., Kress, R., & Kress, R. (1998). Inverse acoustic and electromagnetic scattering theory (Vol. 93, pp. xii+-334). Berlin: Springer.
Daftardar-Gejji, V., Sukale, Y., & Bhalekar, S. (2015). Solving fractional delay differential equations: a new approach. Fractional Calculus and Applied Analysis, 18(2), 400-418.
Dabas, J., & Chauhan, A. (2013). Existence and uniqueness of mild solution for an impulsive neutral fractional integro-differential equation with infinite delay. Mathematical and Computer Modelling, 57(3-4), 754-763.
Dehestani, H., Ordokhani, Y., & Razzaghi, M. (2021). Combination of Lucas wavelets with Legendre-Gauss quadrature for fractional Fredholm-Volterra integro-differential equations. Journal of Computational and Applied Mathematics, 382, 113070.
Driver, R. D. (2012). Ordinary and delay differential equations (Vol. 20). Springer Science & Business Media.
Gopalsamy, K. (2013). Stability and oscillations in delay differential equations of population dynamics (Vol. 74). Springer Science & Business Media.
Hartung, F., & Pituk, M. (Eds.). (2014). Recent Advances in Delay Differential and Difference Equations (Vol. 94). Springer.
Hosseinpour, S., Nazemi, A. & Tohidi, E. (2018). A New Approach for Solving a Class of Delay Fractional Partial Differential Equations. Mediterr. J. Math. 15, 218, https://doi.org/10.1007/s00009-018-1264-z
Kilbas, A. A., Srivastava, H. M., & Trujillo, J. J. (2006). Theory and applications of fractional differential equations (Vol. 204). elsevier.
Kuang, Y. (Ed.). (1993). Delay differential equations: with applications in population dynamics. Academic press.
Mastroianni, G., & Occorsio, D. (2001). Optimal systems of nodes for Lagrange interpolation on bounded intervals. A survey. Journal of computational and applied mathematics, 134(1-2), 325-341.
Moghaddam, B. P., Mostaghim, Z. S., Pantelous, A. A., & Machado, J. T. (2021). An integro quadratic spline-based scheme for solving nonlinear fractional stochastic differential equations with constant time delay. Communications in Nonlinear Science and Numerical Simulation, 92, 105475.
Mohammadizadeh, S., Rashidinia, J., Ezzati, R., & Khumalo, M. (2020). C3-spline for solution of second order fractional integro-differential equations. Alexandria Engineering Journal, 59(5), 3635-3641.
Nevai, P. (1984). Mean convergence of Lagrange interpolation. III. Transactions of the American Mathematical Society, 669-698.
Noori Skandari, M. H., Habibli, M., & Nazemi, A. (2020). A direct method based on the Clenshaw-Curtis formula for fractional optimal control problems. Mathematical Control & Related Fields, 10(1), 171.
Peykrayegan, N., Ghovatmand, M., & Noori Skandari, M. H. (2021). On the convergence of Jacobi-Gauss collocation method for linear fractional delay differential equations. Mathematical Methods in the Applied Sciences, 44(2), 2237-2253.
Podlubny, I. (1998). Fractional differential equations: an introduction to fractional derivatives, fractional differential equations, to methods of their solution and some of their applications. Elsevier.
Ragozin, D. L. (1970). Polynomial approximation on compact manifolds and homogeneous spaces. Transactions of the American Mathematical Society, 150(1), 41-53.
Ragozin, D. L. (1971). Constructive polynomial approximation on spheres and projective spaces. Transactions of the American Mathematical Society, 162, 157-170.
Samko, S. G., Kilbas, A. A., & Marichev, O. I. (1993). Fractional integrals and derivatives (Vol. 1). Yverdon-les-Bains, Switzerland: Gordon and Breach Science Publishers, Yverdon.
Shahmorad, S., Ostadzad, M. H., & Baleanu, D. (2020). A Tau-like numerical method for solving fractional delay integro-differential equations. Applied Numerical Mathematics, 151, 322-336.
Shen, J., Tang, T., & Wang, L. L. (2011). Spectral methods: algorithms, analysis and applications (Vol. 41). Springer Science & Business Media.
Shokri, A., & Mirzaei, S. (2020). Numerical study of the two-term time-fractional differential equation using the Lagrange polynomial pseudo-spectral method. Alexandria Engineering Journal, 59(5), 3163-3169.
Smith, H. L. (2011). An introduction to delay differential equations with applications to the life sciences (Vol. 57). New York: Springer.
Tang, Z., Tohidi, E. & He, F. (2020). Generalized mapped nodal Laguerre spectral collocation method for Volterra delay integro-differential equations with noncompact kernels. Comp. Appl. Math. 39, 298. https://doi.org/10.1007/s40314-020-01352-y
Usman, M., Hamid, M., Zubair, T., Haq, R. U., Wang, W., & Liu, M. B. (2020). Novel operational matrices-based method for solving fractional-order delay differential equations via shifted Gegenbauer polynomials. Applied Mathematics and Computation, 372, 124985.
Wei, Y., & Chen, Y. (2012). Convergence analysis of the spectral methods for weakly singular Volterra integro-differential equations with smooth solutions. Advances in Applied Mathematics and Mechanics, 4(1), 1-20.
Yang, Y., Chen, Y., & Huang, Y. (2014). Spectral-collocation method for fractional Fredholm integro-differential equations. Journal of the Korean Mathematical Society, 51(1), 203-224.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by NM Bujurke.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Peykrayegan, N., Ghovatmand, M., Noori Skandari, M.H. et al. Numerical solution of nonlinear fractional delay integro-differential equations with convergence analysis. Indian J Pure Appl Math (2024). https://doi.org/10.1007/s13226-024-00620-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13226-024-00620-5
Keywords
- Caputo fractional derivative
- Riemann-Liouville fractional integral
- Nonlinear fractional delay integro-differential equations
- Jacobi Gauss points
- Lagrange interpolating polynomial