
Abstract
This paper investigates the problem of finite-time stability and control for a class of nonlinear singular discrete-time neural networks with time-varying delays and disturbances. First, based on the implicit function theorem and singular value decomposition method, a sufficient condition for the existence of the solution of such systems is established in terms of a linear matrix inequality (LMI). Then, using the Lyapunov functional approach combined with LMI technique we provide new delay-dependent sufficient conditions for robust \(H_{\infty }\) finite-time stability and control. Finally, some numerical examples are given to illustrate the efficiency of the proposed results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Over the past decades, the problem of stability and control for neural networks has attracted much attention due to its both practical and theoretical importance [13, 14, 20,21,22, 31]. However, most of the results have been concerned with the asymptotic stability defined over an infinite-time interval. In many practical applications, the main concern is the behavior of the system over a fixed finite-time interval, for example, large values of the state are not acceptable in the presence of saturations. In this case, the traditional Lyapunov method is not applicable and the finite-time stability method is introduced [1, 5, 29]. Many valuable results on finite-time stability and control of continuous-time and discrete-time neural networks can be found in [2, 16, 23, 30, 32] and in the references therein. It should be noticed that in some systems we must consider their character of dynamic and state at the same time. Up to now, a wide variety of design methods for control of delayed neural networks have been studied mainly including stabilization, adaptive control, fuzzy control. The \(H_{\infty }\) control problem is to design state feedback controllers such that, in addition to the requirement of the robust finite-time stability of the closed-loop system, a specified performance level is also required to be achieved. In the literature, singular systems (also referred to as differential-algebraic equations, implicit systems, descriptor systems or generalized state-space systems) arise in a variety of practical systems such as biological systems, artificial electronic systems, system recognition, target tracking, static image processing and associative memory [4, 9, 29]. Both delay-independent and delay-dependent stability conditions for singular time delay systems have been extensively obtained by using the SVD approach and Lyapunov function method [7, 8, 10, 15, 24,25,26]. Meanwhile, considering the singular neural networks is of great significance [11, 12, 19]. Since the singular neural networks are usually described by nonlinear time delay equations, the results on stability and control of such systems are relative few. The main difficulty in studying singular neural networks is to solve the problem of existence and uniqueness of solutions. Some delay-dependent sufficient conditions for optimizing the size of singular neural networks using SVD approach can be found in [11]. The authors of Kumaresan and Balasubramaniam [12] provided solutions to optimal control for stochastic linear singular systems using neural networks with quadratic performance. More interesting criteria for stochastic stability of discrete-time singular neural networks with Markovian jump and time-varying delays were given in [19]. It is also worth mentioning that the problem of existence of the solution and the time-varying delays are not taken into account in the mentioned papers. For nonlinear discrete-time singular systems, since problems of existence and uniqueness of solutions and finite-time stability, regularity, causality need to be considered simultaneously, the finite-time stability analysis for such systems is more complicated and the methods of analyzing the existence and uniqueness of solution to singular systems in the mentioned papers are difficult to be applied. On the other hand, it should be noticed that almost the existing results for singular nonlinear discrete-time systems were developed in the context of Lyapunov asymptotic stability and control while very little attention has been paid to the finite-time stability and control of such systems. To the best of the our knowledge, the problems of the existence of solutions and the finite-time \(H_{\infty }\) control for singular discrete-time neural networks with delay have not been yet investigated, these problems are important and challenging in both theory and practice.
In this paper, we consider \(H_{\infty }\) finite-time stability and control of nonlinear singular discrete-time delay neurals network-based systems. First, by using the implicit function theorem and singular value decomposition method, LMI sufficient conditions are established which guarantees that the discrete-time singular neural networks are regular, causal and have unique solution in a neighborhood of the origin. Then, based on Lyapunov function method, delay-dependent sufficient conditions for designing state feedback controllers of \(H_{\infty }\) finite-time control are derived in terms of LMIs. The design of such controllers can be carried out in a systematic and computationally efficient manner via the use of LMI-based algorithms [6]. The result of this paper can be considered as a further development of the results obtained in [11, 12, 19]. Last, numerical examples are provided to illustrate the validity and effectiveness of the proposed results.
The structure of the paper is as follows. Section 2 presents problem statement and some technical propositions needed for the proof of the main results. Sufficient conditions for the existence and uniqueness of the solution and for designing state feedback controllers for robust \(H_{\infty }\) control problem are presented in Sect. 3. Numerical examples illustrated that the obtained results are given in Sect. 4.
Notation
\(Z_{+}\) denotes the set of all nonnegative integers; \({R}^{n}\) denotes the n-dimensional space with the scalar product \(x^{\top }y;\,{R}^{n \times r}\) denotes the space of \((n\times r)-\)dimension matrices; \(A^{\top }\) denotes the transpose of matrix A; A is positive definite \((A > 0)\) if \(x^{\top }Ax > 0\) for all \(x \not = 0;\, A > B\) means \(A - B > 0\). The notation diag\(\{\ldots \}\) stands for a block-diagonal matrix. The symmetric term in a matrix is denoted by \(*\).
2 Problem Formulation and Preliminaries
Consider the following discrete-time singular neural networks with time-varying delays and disturbances
where \(x(k)\in {R}^n\) is the state; \(u(k) \in {R}^m\) is the control input; \(z(k)\in {R}^p\) is the observation output; n is the number of neural; \( f(x(k)) = [f_1(x_1(k)), f_2(x_2(k)), \ldots , f_n(x_n(k))],g(x(k-h(k))) = [g_1(x_1(k-h(k))), g_2(x_2(k-h(k))), \ldots , g_n(x_n(k-h(k)))]\) are activation functions, where \(f_{i}, g_{i}, i=\overline{1,n},\) satisfy the following conditions
The matrix \(E\in {R}^{n\times n}\) is singular and rank\((E) = r \leqslant n.\) The diagonal matrix \(A=\text{ diag }\{\overline{a}_{1}, \overline{a}_{2},\ldots , \overline{a}_{n}\},|\overline{a}_i| < 1\; \forall i=\overline{1,n}\) represents the self-feedback term; the matrices \(W, W_1\in {R}^{n\times n}\) are the connection weight matrices; \(B\in {R}^{n\times m}, B_1\in {R}^{p\times m}\) are the control matrices; \(C\in {R}^{n\times q}\) is the disturbance matrix; \(A_1, D\in {R}^{p\times n}\) are the observation matrix; the time-varying delay functions h(k) satisfy the condition
where \(h_1, h_2\) are given positive integers; \(\varphi (k)\) is the initial function; the external disturbance \(\omega (k)\in {R}^q\) satisfies the condition
where \(d > 0\) is a given number.
Definition 1
[4] The pair (E, A) is said to be regular if characteristic polynomial det\((sE - A)\), where \(s\in {C}\), is not identical zero. The pair (E, A) is said to be causal if \(\text {deg(det}(sE - A)) = \text {rank}(E)\). System (1) with \(u(k) =0\) is said to be regular and causal if the pair (E, A) is regular and causal.
Definition 2
(Robust finite-time stability [5]) Given positive numbers \(N, c_1, c_2, c_1<c_2,\) and a symmetric positive-definite matrix R, unforced system (1) (\(u(k) =0\)) is robustly finite-time stable w.r.t. \((c_1, c_2, R, N)\) if
for all disturbances \(\omega (k)\) satisfying (4).
Definition 3
(\(H_{\infty }\)finite-time stability [1]) Given positive numbers \(\gamma , N, c_1, c_2, c_1<c_2,\) and a symmetric positive-definite matrix R, unforced system (1) (\(u(k) =0\)) is \(H_{\infty }\) finite-time stable w.r.t. \((c_1, c_2, R, N)\) if the following two conditions hold:
-
(i)
System (1) is robustly finite-time stable w.r.t. \((c_1, c_2, R, N)\).
-
(ii)
Under the zero initial condition (i.e., \(\varphi (k) = 0 \; \forall k\in \{-h_2, -h_2+1, \ldots , 0\}\)), the output z(k) satisfies
$$\begin{aligned} \sum _{k=0}^Nz^{\top }(k)z(k) \leqslant \gamma \sum _{k=0}^N\omega ^{\top }(k)\omega (k) \end{aligned}$$(5)for all disturbances \(\omega (k)\) satisfying (4).
Definition 4
(\(H_{\infty }\)finite-time control) Given positive numbers \(\gamma , N, c_1, c_2, c_1<c_2,\) and a symmetric positive-definite matrix R, the finite-time \(H_{\infty }\) control problem for system (1) has a solution if there exists a state feedback controller \(u(k)=Kx(k)\) such that the resulting closed-loop system is \(H_{\infty }\) finite-time stable w.r.t. \((c_1, c_2, R, N).\)
Proposition 1
(Schur Complement Lemma [3]) Given constant matrices X, Y, Z with appropriate dimensions satisfying \(X=X^{\top }, Y=Y^{\top }>0,\) then
Proposition 2
(The Implicit Function Theorem [28]) Suppose that V is open in \({R}^{n+p}\), and \(F = (F_1, \ldots , F_n){:}\,V \longrightarrow {R}^{n}\) is \(C^1\) on V. Suppose further that \(F(x_0, t_0) = 0\) for some \((x_0, t_0) \in V\), where \(x_0 \in {R}^{n}\) and \(t_0 \in {R}^{p}\). If Jacobian matrix
is nonsingular, then there is an open set \(W\subset {R}^{p},\) containing \(t_0\) and a unique continuously differentiable function \(g{:}\,W\longrightarrow {R}^{n}\) such that \(g(t_0) = x_0\), and \(F(g(t), t) = 0\) for all \(t\in W\).
3 Main Results
Consider singular discrete-time neural networks (1). Due to rank\((E) = r \le n,\) there are two nonsingular matrices \(M, G \in {R}^{n\times n}\) such that \(MEG = \begin{bmatrix} I_r&\quad 0\\ 0&\quad 0\\ \end{bmatrix}\). Let us denote
We first show the existence and uniqueness of the solution and the regularity and causality of system (1).
Theorem 1
Given positive constants \(\gamma , N, \delta \ge 1\) unforced system (1) \((u(k) =0)\) is regular, causal and has unique solution if there exist symmetric positive-definite matrices \(P, Q, S_1, S_2\) such that the following LMI holds\(\mathrm{:}\)
Proof
First, we prove that unforced system (1) is regular and causal. From (6), it follows that \(\varPhi _{11} < 0\). Since \(Q> 0, S_1> 0, F > 0\) and G is nonsingular, we have \(G^{\top }(-\delta E^{\top } PE - P\bar{M}A - A\bar{M}^{\top }P)G <0\) and hence
where \(\star \) represents matrices that are not relevant in the discussion. The last inequality shows that \((G^{\top }P)_{22}A_{22} + A_{22}^{\top }(G^{\top }P)_{22}^{\top } > 0.\) Assume that \(A_{22}\) is singular, then there exists a vector \(0\ne \eta \in \mathbb {R}^{n-r}\) such that \(A_{22}\eta = 0\). We have
i.e., the matrix \((G^{\top }P)_{22}A_{22} + A_{22}^{\top }(G^{\top }P)_{22}^{\top }\) is not positive definite. This contradiction enable us to confirm that \(A_{22}\) is nonsingular matrix. Hence, according to Definition 1 and [4], the system is regular and causal. We now are in position to prove that the system has a unique solution. By setting
the functions \(f_i(x_i(k))\) and \(g_i(x_i(k-h(k)))\) can be presented in a neighborhood of the origin as
where \(\alpha _i(0) = 0,\; \beta _i(0) = 0\) and
We then have
where \(\varGamma = \text {diag}\{\gamma _1, \ldots , \gamma _n\}, \varLambda = \text {diag}\{\lambda _1, \ldots , \lambda _n\}\) and
Therefore, unforced system (1) can be represented by
Combining conditions (2) and (7) gives
Letting \(\Vert x(k)\Vert \rightarrow 0\), we can see that
Let \( \varUpsilon := \begin{bmatrix} I_{4\times 4}&\quad 0\\ \varGamma _{4,0}&\quad I_{4\times 4} \end{bmatrix},\, \varGamma _{4,0} = \begin{bmatrix}\varGamma&\quad 0&\quad 0&\quad 0\\0&\quad 0&\quad 0&\quad 0\\0&\quad 0&\quad 0&\quad 0\\0&\quad 0&\quad 0&\quad 0\end{bmatrix}, \) then
where \(\bar{\varPhi } = \begin{bmatrix} \bar{\varPhi } _{ij} \end{bmatrix}_{8\times 8}\) with
From (8) and \(\bar{\varPhi }_{11} < 0\), we get
Similar to the proof of (E, A) being regular and causal in the first step, it can be obtained that the pair \((E, A + W\varGamma )\) is regular and causal. That is the approximation system of unforced system (1) in a neighborhood of the origin:
is regular and causal. Setting
unforced system (1) is restricted system equivalent to the following system
Since system (9) is regular and causal, the matrix

where \(F(x^1,x^2,f^2,g^2,w^2):= A_{21}x^1(k) + A_{22}x^2(k) + f^2(\cdot ) + g^2(\cdot ) + \omega ^2(k),\) is nonsingular. From Proposition 2, it follows that in a neighborhood of (0, 0, 0, 0, 0), there exists a unique continuous differentiable function \(\hat{f}^2(x^1(k), x^1(k-h(k)), x^2(k-h(k)), \omega ^2(k))\) on \(x^1(k), x^1(k-h(k)), x^2(k-h(k)), \omega ^2(k)\) such that
and \(\hat{f}^2(0,0,0,0) = 0.\) That is in a neighborhood of (0, 0, 0, 0, 0), the second equation of (10) has a unique solution:
Substituting the above solution to the first equation of (10), we obtain
So the system has a unique solution. This completes the proof of the theorem. \(\square \)
Remark 1
It should be mentioned that the existence of a solution is a fundamental issue for nonlinear singular systems. The authors in [18] provided a sufficient condition for the existence and uniqueness of the solution of discrete systems with nonlinear perturbation by using the fixed point principle. In Theorem 1, using the implicit function theorem we propose a sufficient condition for not only the existence and uniqueness of the solution of system (1), but also the regularity and casualty of the system. The condition is given in terms of LMIs, which can be efficiently solved by using LMI control toolbox algorithm [6].
In the sequel, we give the solution to \(H_{\infty }\) finite-time stability of unforced system (1).
Theorem 2
Given positive numbers \(\gamma , N, \delta \ge 1, c_1, c_2\) and a symmetric positive-definite matrix R. Unforced system (1) is \(H_{\infty }\) finite-time stable w.r.t. \((c_1, c_2, R, N)\) if there exist symmetric positive-definite matrices \(P, Q, S_1, S_2\), positive scalars \(\lambda _i, i = \overline{1,5}\) such that the following LMIs hold\(\mathrm{:}\)
where
Proof
Consider the following nonnegative quadratic functions: \( V(k) = \sum _{i=1}^3V_i(k)\) where
Denoting \(\eta (k):= [x^{\top }(k), f^{\top }(\cdot ), g^{\top }(\cdot ), \omega ^{\top }(k)]^{\top }, \mathcal {M} := [A, W, W_1, C]\) and taking the difference variation of \(V_{i}(k), i = 1, 2, 3,\) we have
Thus we get
The following estimations hold true by the assumption (2):
Multiplying by \(-2x^{\top }(k)P\bar{M}\) the both side of Eq. (1) and note that \(\bar{M}E = 0\), we obtain
By setting
we see that
where \(\varUpsilon :=\begin{bmatrix} PA&\quad 0&\quad 0&\quad 0&\quad PW&\quad PW _1&\quad PC \end{bmatrix}.\) Combining (14), (15), (16) gives
where
Furthermore, if we set
then the following relations holds
As a result, from (11) and (17) it follows that
By iteration, and taking assumption (4) into account, the inequality (18) implies
Using assumption (12) and \(x(k) = \varphi (k), k\in \{-h_2,-h_2+1,\ldots ,0\},\) it is easily seen that
Associating (19) with (20), we get
where
On the other hand, according to (12) again, the following estimation holds
Moreover, by the Schur complement lemma ([3]) condition (13) is equivalent to
Consequently, we get from (21), (22) and (23) that:
which implies that the unforced system is robustly finite-time stable w.r.t. \((c_1, c_2, R, N)\). To complete the proof of the theorem, it remains to show the \(\gamma \)-level condition (5). For this, from (17) it follows that
and hence by iteration it derives that
Since \(V(0) =0,\) the above inequality implies
For \(k=N+1,\) we have
Since \(1\le \delta ^{N-s}\le \delta ^{N}\; \forall s\in \{0, 1, \ldots , N\}\), (24) immediately yields
which implies that condition (5) holds. The proof of the theorem is completed. \(\square \)
We are now in position to solve the problem of finite-time \(H_{\infty }\) control for system (1) by designing a state feedback controller \(u(k)=Kx(k)\) such that the resulting closed-loop system
is \(H_{\infty }\) finite-time stable.
Theorem 3
Given positive constants \(\gamma , N, \delta \ge 1, c_1, c_2\) and a symmetric positive-definite matrix R. The finite-time \(H_{\infty }\) control problem of system (1) has a solution if there exist symmetric positive-definite matrices \(U_i, V_j\) with \(i = \overline{1,4}, j = \overline{1,5}, \) a matrix Y such that the following LMIs hold:
Moreover, the state feedback controller is given by
where \(\rho = c_1\tfrac{h_2(h_2+1)-h_1(h_1-1)}{2}\delta ^{N+h_2}\) and
Proof
Using Theorem 2, closed-loop system (25) is \(H_{\infty }\) finite-time stable if there exist symmetric positive-definite matrices \(P, Q, S_1, S_2\), positive scalars \(\lambda _i, i = \overline{1,5},\) such that conditions (11), (12) and (13), where matrices \(A+BK, A_1+B_1K\) will in place of the matrices \(A, A_1,\) hold. In other words, in proportion to (11), we have
where
Pre- and post-multiplying (31) by the matrix:
and then define new matrix variables as follows:
we easily obtain the following equivalent inequality
where \(\bar{\varTheta } = \begin{bmatrix} \bar{\varTheta }_{ij} \end{bmatrix}_{11\times 11}\) with
Letting \(Y^{\top } = U_1K^{\top }, K= YU_1^{-1},\) (32) becomes
where \(\bar{\varOmega } = \begin{bmatrix} \bar{\varOmega }_{ij} \end{bmatrix}_{11\times 11}\) with
It is easy to see that
hence condition (33) holds if condition (26) holds. For getting (29), post-multiplying matrix (13): \([v_{ij}I]_{5\times 5}\) by the matrix \(diag \{R, R, R, R, R\}>0\) and then pre- and post-multiplying the derived matrix again by the matrix diag\(\{P^{-1}, P^{-1}, P^{-1}, P^{-1},P^{-1}\}>0,\) and setting new variables
we reach (29) as expected. To obtain the inequalities (27) and (28), we just pre- and post-multiplying (12) by the matrix \(P^{-1}\). Indeed, we prove (27) as illustrator
which is equivalent to (27) by Proposition 1. Finally, note that
we get \( V_3 - c_2 U_3 + \gamma \mathrm{d}U_1R[\gamma \mathrm{d}R]^{-1}\gamma \mathrm{d} RU _1 < 0, \) which is evidently equivalent to (30) by Proposition 1. The proof of the theorem is complete. \(\square \)
Remark 2
The results obtained in Theorems 2 and 3 can be regarded as an extension of the results of [11, 12, 19] on \(H_{\infty }\) control for discrete-time neural network (1). To the best of our knowledge, this is the first time that the problem of \(H_{\infty }\) control of nonlinear singular discrete-time neural network systems with time-varying delays and disturbances. Note that Theorems 2 and 3 provide delay-dependent sufficient conditions for the \(H_{\infty }\) finite-time stability and control of the singular neural networks with time-varying delays. The obtained conditions are formulated in terms of LMIs, which can be efficiently solved by using various convex optimization algorithm.
4 Numerical Examples
In this section, we provide some numerical examples. It is worth noting that the finite-time stability and control problem for system (1) is first time studied and solved in our paper and there have not been any similar results obtained for system (1) such that the following examples are given to illustrate the validity and effectiveness of the derived conditions only. In the case, when the discrete-time neural networks (1) reduce to the nonsingular system (\(E= I\)), our result can be viewed as an extension of existing results [13, 19, 22, 27].
Example 1
Consider unforced system (1) (\(u(k) = 0\)), where
By simple calculation, we can find
For given \(h_1=2,\; h_2=15,\; N=60,\; d=1,\; c_1=1,\; c_2=8\) and \(\gamma =1\), the LMIs (11)–(13) are feasible with \(\delta =1.0001\) and
Since the inequalities (6) and (11) are equivalent, the system is regular, causal, and it has a unique solution and is robustly \(H_{\infty }\) finite-time stable w.r.t. (1, 8, R, 60).
Example 2
Consider singular system (1), where
We can find that
For given \(h_1=2,\; h_2=14,\; N=40,\; d=1,\; c_1=2,c_2 =25\) and \(\gamma =1\), the LMIs (26)–(30) are feasible with \(\delta =1.0001\) and
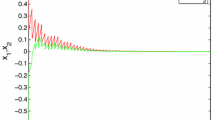
The \(H_{\infty }\) finite-time control problem of system (1), by Theorem 3, has a solution, and the state feedback controller is given by
Figure 1 shows the response solution with the initial condition

Response solution of the closed-loop system
5 Conclusion
The problem of \(H_{\infty }\) finite-time stability and control of nonlinear singular discrete-time neural networks with time-varying delays and disturbances has been studied in this paper. Based on the singular systems theory and Lyapunov functional method, we have provided new delay-dependent sufficient conditions for the existence and uniqueness of solutions and the \(H_{\infty }\) finite-time control for such systems. The conditions for the existence of state feedback controllers are easy to check by using MATLAB LMI control toolbox.
References
Amato, F., Ambrosino, R., Ariola, M., Cosentino, C., Tommasi, G.D.: Finite-Time Stability and Control. Springer, Berlin (2014)
Bao, H., Cao, J.: Finite-time generalized synchronization of nonidentical delayed chaotic systems. Nonlinear Anal. Model. Control 21(2), 306–324 (2016)
Boyd, S., Ghaoui, L.El, Feron, E., Balakrishnan, V.: Linear Matrix Inequalities in System and Control Theory. SIAM, Philadelphia (1994)
Dai, L.: Singular control systems. In: Lecture Notes in Control and Information Sciences. Springer, Heidelberg (1989)
Dorato, P.: Short time stability in linear time-varying systems. Proc. IRE Int. Conv. Rec. 4, 83–87 (1961)
Gahinet, P., Nemirovskii, A., Laub, A.J., Chilali, M.: LMI Control Toolbox for Use with MATLAB. The MathWorks Inc. Natick (1995)
Feng, Z., Shi, P.: Two equivalent sets: application to singular systems. Automatica 77, 198–205 (2017)
Feng, Z., Shi, P.: Sliding mode control of singular stochastic Markov jump systems. IEEE Trans. Autom. Control 62(8), 4266–4273 (2017)
Heaton, J.: Introduction to the Math of Neural Networks. Heaton Research Inc. Chesterfield (2012)
Kang, D., Li, J., Xu, L.: Existence and nonexistence of ground state solutions to singular elliptic systems. Bull. Malays. Math. Sci. Soc. (2017). https://doi.org/10.1007/s40840-017-0518-4
Kanjilal, P., Dey, P., Banerjee, D.: Reduced-size neural networks through singular value decomposition and subset selection. Electron. Lett. 29, 1516–1518 (1993)
Kumaresan, N., Balasubramaniam, P.: Optimal control for stochastic linear quadratic singular system using neural networks. J. Process Control 19, 482–488 (2009)
Kwon, O.M., Park, M.J., Park, J.H., Lee, S.M., Cha, E.J.: New criteria on delay-dependent stability for discrete-time neural networks with time-varying delays. Neurocomputing 121, 185–194 (2013)
Lee, T.H., Park, M.J., Park, J.H., Kwon, O.M., Lee, S.M.: Extended dissipative analysis for neural networks with time-varying delays. IEEE Trans. Neural Netw. Learn. Syst. 25(10), 1936–1941 (2014)
Liang, S.: Positive solutions for singular boundary value problem with fractional q-differences. Bull. Malays. Math. Sci. Soc. 38(2), 647–666 (2015)
Liu, X., Park, J.H., Jiang, N., Cao, J.: Nonsmooth finite-time stabilization of neural networks with discontinuous activations. Neural Netw. 52, 25–32 (2015)
Li, Z., Wang, S.: Robust optimal \(H_\infty \) control for irregular buildings with AMD via LMI approach. Nonlinear Anal. Modell. Control 19(2), 256–271 (2014)
Lu, G.P., Ho, D.W.C.: Generalized quadratic stability for continuous-time singular systems with nonlinear perturbation. IEEE Trans. Autom. Control 51(5), 818–823 (2006)
Ma, Y., Zheng, Y.: Delay-dependent stochastic stability for discrete singular neural networks with Markovian jump and mixed time-delays. Neural Comput. Appl. (2016). https://doi.org/10.1007/s00521-016-2414-5
Phat, V.N., Trinh, H.: Exponential stabilization of neural networks with various activation functions and mixed time-varying delays. IEEE Trans. Neural. Netw. 21, 1180–1185 (2010)
Ratnavelu, K., Kalpana, M., Balasubramaniam, P.: Stability analysis of fuzzy genetic regulatory networks with various time delays. Bull. Malays. Math. Sci. Soc. (2016). https://doi.org/10.1007/s40840-016-0427-y
Sakthivel, R., Mathiyalagan, K., Anthoni, S.: Robust \(H_\infty \) control for uncertain discrete-time stochastic neural networks with time-varying delays. IET Control Theory Appl. 6(9), 1220–1228 (2012)
Shen, H., Park, J.H., Wu, Z.G.: Finite-time synchronization control for uncertain Markov jump neural networks with input constraints. Nonlinear Dyn. 77(4), 1709–1720 (2014)
Shen, H., Su, L., Park, J.H.: Extended passive filtering for discrete-time singular Markov jump systems with time-varying delays. Signal Process. 128, 68–77 (2016)
Song, S., Ma, S., Zhang, C.: Stability and robust stabilisation for a class of nonlinear uncertain discrete-time descriptor Markov jump systems. IET Control Theory Appl. 6, 2518–2527 (2012)
Tuan, L.A., Nam, P.T., Phat, V.N.: New \(H_\infty \) controller design for neural networks with interval time-varying delays in state and observation. Neural Process. Lett. 37, 235–249 (2013)
Tuan, L.A., Phat, V.N.: Robust finite-time stability and \(H_\infty \) control of linear discrete-time delay systems with norm-bounded disturbances. Acta Math. Vietnam. 41, 481–493 (2016)
Wade, W.R.: An Introduction to Analysis, 4th edn. Prentice Hall, New Jersey (2009)
Wu, Z.G., Su, H., Shi, P., Chu, J.: Analysis and Synthesis of Singular Systems with Time-Delays. Springer, Heidelberg (2013)
Wu, Y., Cao, J., Alofi, A., AL-Mazrooei, A., Elaiw, A.: Finite-time boundedness and stabilization of uncertain switched neural networks with time-varying delay. Neural Netw. 69, 135–143 (2015)
Xu, C., Li, P.: \(p\)-th moment exponential stability of stochastic fuzzy Cohen Grossberg neural networks with discrete and distributed delays. Nonlinear Anal. Modell. Control 22(2), 531–544 (2017)
Zhang, Y., Shi, P., Nguang, S.K., Song, Y.: Robust finite-time \(H_\infty \) control for uncertain discrete-time singular systems with Markovian jumps. IET Control Theory Appl. 8, 1105–1111 (2014)
Acknowledgements
This work was supported by the National Foundation for Science and Technology Development, Vietnam, Grant 101.01.2017.300. The authors wish to thank anonymous reviewers for valuable comments and suggestions, which allowed us to improve the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Syakila Ahmad.
Rights and permissions
About this article

Cite this article
Tuan, L.A., Phat, V.N. Existence of Solutions and Finite-Time Stability for Nonlinear Singular Discrete-Time Neural Networks. Bull. Malays. Math. Sci. Soc. 42, 2423–2442 (2019). https://doi.org/10.1007/s40840-018-0608-y
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40840-018-0608-y
Keywords
- Finite-time stability
- Stabilization
- Singularity
- Discrete-time systems
- Time-varying delays
- Linear matrix inequalities