
Abstract
In this paper, the problem of observer-based adaptive fuzzy decentralized control is studied for uncertain large-scale nonlinear systems with full state constraints, input saturation and unmeasurable state. Compared with the existing literature, the state directly measurable problem is relaxed, and the systems with full state constraints and input saturation problem are further considered. In order to solve the controller design difficulties caused by input saturation and state constraints, the auxiliary design functions and the barrier Lyapunov functions are employed, respectively. By utilizing adaptive backstepping technique and Lyapunov stability theorem, an observer-based adaptive fuzzy decentralized control approach is developed. It is proved that all the signals of the closed-loop systems are semi-globally uniformly ultimately bounded and the observer errors are converged on a small neighborhood of the origin. The tracking errors are remained in the bounded compact set, and the full state constraints are not violated. Two practical examples are given to demonstrate the usefulness of the proposed control scheme.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In past years, nonlinear adaptive control based on backstepping technology has received extensive attention. In early times, these studies [1,2,3] required that the uncertain nonlinearities in systems either are known linear function with unknown parameters, or bounded by known nonlinear functions. It is well known that if a priori knowledge of the above structure or the upper bound of these unknown nonlinearities are not available, then these methods are no longer applied. Under such restrictions, the unknown nonlinear functions are identified via adaptive neural network control [4,5,6], or adaptive fuzzy control [7,8,9]. Literature [6] researched the output feedback control problem with a class of stochastic nonlinear systems with non-strict feedback structures and used neural networks’ universal approximation capability to approximate nonlinear functions. Literature [7] investigated the nonlinear fuzzy adaptive controller design problems with arbitrary switching, and the nonlinear function is approximated by fuzzy logic system. Literature [9] proposed a corresponding adaptive fuzzy tracking control approach for the uncertain nonlinear strict feedback systems. In the above studies, the unknown nonlinearities are approximated to use neural networks or fuzzy logic systems and combined with backstepping technique to construct controllers. Recently, the approximate dependent adaptive control of output feedback systems has been further developed [10,11,12].
Although the controller design approaches based on adaptive fuzzy backstepping technique have made great progress, the ones are directed to the normal operation of the nonlinear system. It is known that many control systems have constraints on their inputs, such as input saturation, hysteresis [13] or dead-zone [14,15,16]. In fact, the most important form of constraint is input saturation that is widely studied in [17,18,19,20,21,22]. Among them, literature [17] researched the adaptive control problem of uncertain nonlinear system with input saturation. And the nonlinear term is compensated by the Nussbaum function. In order to relax the requirement that the nonlinear function can be linearly parameterized in [18]. Subsequently, studies [21] and [22] further extend the content of [17] to MIMO nonlinear systems. However, the aforementioned works did not consider the state constraints. State constraint is also an important control index. By far, the problem of state constraints nonlinear systems has been widely studied, for example, partial state constraints [23, 24] and full state constraints [25,26,27,28,29,30]. By constructing BLF, the states of the system can be constrained within the given value. Thus, literature [24] proposed the output constrained uncertain nonlinear systems with input saturation. In addition to this constraint method, literature [25] used an one-to-one nonlinear mapping to transform a strict feedback system into a pure feedback system and eliminated state constraints. Moreover, studies [26,27,28] studied the state constrained controller design problem for pure feedback systems. From above analysis, the controller design methods are no longer applicable to the case of the uncertain nonlinear large-scale systems with full state constraints. Therefore, the control scheme for the uncertain nonlinear large-scale systems with full state constraints is developed.
It is well known that uncertain large-scale nonlinear systems usually need to design decentralized controllers for each subsystem. Different from centralized control, decentralized control is easier to implement, but decentralized controller design is difficult to design, see [31,32,33,34,35,36,37,38,39,40,41] and the references therein. The method of processing interconnection terms is given in studies [31,32,33], where the uncertainty the interconnected items are replaced by unknown pth-order polynomial in outputs. Subsequently, literature [34] used this method to study the decentralized fault-tolerant control of large-scale nonlinear systems with actuator failures. In addition, studies [35,36,37,38,39,40,41] studied other constraints of uncertain large-scale nonlinear systems. Literature [37] investigated decentralized control for nonlinear large-scale systems with unknown dead-zone inputs. Literature [41] proposed the output constraints problem for nonlinear interconnected time-delay systems. Observer-based adaptive fuzzy tracking control for nonlinear systems with time delays and input saturation is studied in [42]. However, many large-scale systems tend to ignore cusp of the input saturation, the performance of the closed-loop systems will be severely degraded, and instability may occur. On the other hand, the full state constraints of large-scale systems are complex and rarely studied in the existing results. Therefore, it is significant work to study the observer-based adaptive fuzzy decentralized control of uncertain large-scale nonlinear systems with full state constraints, input saturation and unmeasurable state.
Motivated by the aforementioned observations, observer-based adaptive fuzzy decentralized control for uncertain large-scale nonlinear systems is studied in this paper. The uncertain terms contain uncertain nonlinear functions and unmeasurable states, and the constraint terms include full state constraints and input saturation. The fuzzy logic systems are utilized to approximate the nonlinear functions, and the fuzzy observers are designed to estimate the unmeasurable states in the systems. In contrast to existing results, the main contributions can be summarized as:
-
(1)
The assumption that the state directly measurable is relaxed, and the full state constraints problem is further considered.
-
(2)
The input saturated cusp is replaced by the auxiliary design functions, which makes the input function smooth and the BLFs differentiable; then, the full state constraints of the uncertain large-scale nonlinear systems can be guaranteed by the BLFs.
-
(3)
An adaptive fuzzy decentralized controller is proposed for uncertain large-scale nonlinear systems with full state constraints, input saturation and unmeasurable state.
Finally, it is proved that all the signals of the closed-loop systems are SGUUB and the observer errors are converged on a small neighborhood of the origin. The tracking errors are remained in the bounded compact set, and the full state constraints are not violated.
2 Preliminaries and Problem Statement Assumption
2.1 System Descriptions
Consider the following uncertain large-scale nonlinear systems, which consist of N interconnected subsystems:
where \(\underline{x}_{i,j}=[x_{i,1},\ldots ,x_{i,j}]^{\mathrm{T}}\in {\mathfrak {R}}^j\), \(i=1,2,\ldots ,N\), \(j=1,2,\ldots ,n_i\) are the state vectors, \(\overline{y}=[y_1,\ldots ,y_N]^{\mathrm{T}}\in {\mathfrak {R}}^N\) is the systems output. \(f_{i,j}(\underline{x}_{i,j})\in {\mathfrak {R}}\) are unknown smooth functions. The output \(y_{i}\) must be retained in the set \(|y_{i}|\le {k_{cij}}\)(output constraints), \(\forall t\ge 0\), where \(k_{cij}\) are positive constants. \(v_{i}(t)\) are the controller input to be designed, \(u_{i}(v_{i}(t))\) denotes the systems input subject to saturation type nonlinearly. \(\Delta _{i,j}(\overline{y})\in {\mathfrak {R}}\) are uncertain smooth functions represents the connection between the ith subsystem and other subsystems. In the paper, only the output \(y_i\) is measurement. \(u_{i}(v_{i}(t))\) is described by
where \(u_{iM}\) is the bound of \(u_{i}\). From the above formula (2), the relationship can be obtained and there is a sharp point at \(|v_{i}(t)|=u_{iM}\). Because there is a sharp point, the adaptive backstepping technology cannot be directly used. The auxiliary design functions are used to replace the input saturation as follows:
Then, \({\mathrm{sat}}(v_{i}(t))\) in (2) can be written as
where \(\rho _i(v_{i})={\mathrm{sat}}(v_{i}(t))-g_{i}(v_{i}(t))\) is a bounded functions whose bound can be expressed as

Saturation(red solid line: \({\mathrm{sat}}(v_i)\); blue dot line: smooth \(g_i(v_i)\))
Note that in the section \(0\le |v_{i}|\le {u_{iM}}\) the bound \(\rho _{i}(v_{i})\) increases from 0 to \(D_i\) as \(|v_{i}|\) changes from 0 to \(u_{iM}\), and outside this range the bound \(\rho _{i}(v_{i})\) decreases from \(D_{i}\) to 0. Figure 1 shows approximation of the saturation function, where \(u_{iM}=3\). In paper [24], a functional image of the saturation input and an auxiliary function is given, when the upper limit of saturation is 5.
Thus, system (1) can be rewritten as
where \(X_{i}=[x_{i,1},\ldots ,x_{i,n_i}]^{\mathrm{T}}\), \(A_{i,0}=\left[ \begin{array}{ccccc}0\\ \vdots &{} I_{n_{i}-1}\\ 0&{} \cdots &{} 0\end{array}\right]\), \(\Delta _{i}(\overline{y})=[\Delta _{i,1}(\overline{y}),\ldots ,\Delta _{i,n_i}(\overline{y})]^{\mathrm{T}}\), \(C_{i}=[1,\ldots ,0]^{\mathrm{T}}\), \(B_{i,j}=[\underset{j-1}{\underbrace{0,\ldots ,0}},1,0,\ldots ,0]^{\mathrm{T}}\).
The following assumptions are given to facilitate the design of the controller of the systems.
Assumption 1
[37] The nonlinear interconnected terms \(\Delta _{i,j}(\overline{y})\) satisfy
where \(\Delta _{i,j}(\overline{y})\) are unknown except that they are bounded by an unknown \(p_{i,j}\)th-order polynomial in outputs and \(q_{ijl}^k\) is an unknown constant.
Assumption 2
It is assumed that the reference signal \(y_{i,d}\) and its kth order derivatives \(y_{i,d}^{(k)},i=1,2,\ldots ,N, k=1,2,\ldots ,n_i\) satisfy \(|y_{i,d}|\le {a_{i0}}\) and \(|y_{i,d}^{(k)}|\le {a_{ik}}\) where \(a_{i0},a_{i1},\ldots ,a_{ik}\) are positive constants.
Assumption 3
Assume that functions \(f_{i,j}\) satisfy the global Lipschitz condition, there exists known constant \(L_{i,j}\) such that the following inequalities hold
Remark 1
In order to design the adaptive controller, the processing of interconnected terms is studied in studies [31, 34]. An unknown pth-order polynomial is designed as an upper bound to replace the uncertain interconnect term. In the article, the same method is used to handle the interconnect items. And the auxiliary design functions are used to remove the cusp of the input saturation.
2.2 Fuzzy Logic Systems
Due to the uncertainty of the existence of nonlinear functions, the fuzzy logic systems (FLS) are introduced. Construct fuzzy logic systems with the following form of if–then rules:
\(R^{q}\): if \(x_{1}\) is \(F^{q}_{1}\) and \(x_{2}\) is \(F^{q}_{2}\) and ...and \(x_{n}\) is \(F^{q}_{n}\), then y is \(B^{q},q=1,2,\ldots ,\iota .\) where x=\([x_1,\ldots ,x_n]^{\mathrm{T}}\) and y are the fuzzy logic system input and output, respectively. Fuzzy sets \(F^{q}_i\) and \(B^{q}\), associated with the fuzzy functions \(\mu _{F^q_i}(x_i)\) and \(\mu _{B^q}(y)\), respectively. \(\iota\) is the rules number. Through singleton function, center average defuzzification and product inference, the FLS can be formulated as
where \(\widetilde{y}_{q} = max_{y\in R}\mu _{B^q}(y)\).
Let \(\varphi _q = \frac{\prod ^n_{i=1}\mu _{F^q_i}(x_i)}{\sum ^\iota _{q=1}(\prod ^n_{i=1}\mu _{F^q_i}(x_i))}\), and denote \(\theta =[ \widetilde{y}_1,\widetilde{y}_2,\ldots ,\widetilde{y}_\iota ]^{\mathrm{T}}=[\theta _1,\theta _2,\ldots ,\theta _\iota ]^{\mathrm{T}}\) and \(\varphi (x)=[\varphi _1(x),\ldots ,\varphi _\iota (x)]\), then FLS (9) can be rewritten as \(y(x)=\theta ^T\varphi (x).\)
Lemma 1
[33] Letf(x) be a continuous function defined on a compact set\(\Omega\). Then for any constant\(\varepsilon >0\), there exists an FLS such as
2.3 Fuzzy State Observer Design
Since the state of the systems is unmeasurable, fuzzy state observer is designed to estimate the state of the systems and define the ideal parameter vector \(\theta _{i,j}^*\) as
where \({x}_{i,1}\in {\Omega _{i,1}}\) and \(\hat{\underline{x}}_{i,j}\in {\Omega _{i,j}^{'}}\). \({{U_{i,j}^{'}}}\) and \(\Omega _{i,j}^{'}\) are compact sets for \(\hat{\theta }_{i,j}\) and \(\hat{\underline{x}}_{i,j}\), respectively.
By Lemma 2.1, the nonlinear functions can be approximated by the following FLSs:
Define the fuzzy minimum approximation errors as \(\varepsilon _{i,1}=f_{i,1}(x_{i,1})-\hat{f}_{i,1}(x_{i,1}|\theta _{i,1}^*),\)\(\varepsilon _{i,j}=f_{i,j}(\hat{\underline{x}}_{i,j})-\hat{f}_{i,j}(\hat{\underline{x}}_{i,j}|\theta _{i,j}^*).\) Where \(\hat{\underline{x}}_{i,j}=[\hat{x}_{i,1},\ldots ,\hat{x}_{i,j}]^{\mathrm{T}}\) are the estimation of the state \(\underline{x}_{i,j}\). Assume that there exists a constant \(\varepsilon _{i,j}^*\) such that \(|\varepsilon _{i,j}|\le \varepsilon _{i,j}^*\).
The corresponding fuzzy observer is designed as
where \(\hat{X}_i=[\hat{x}_{i,1},\hat{x}_{i,2},\ldots ,\hat{x}_{i,n_i}]^{\mathrm{T}}\), \(A_{i}=\left[ \begin{array}{ccc} -k_{i,1}&{}&{}\\ \vdots &{} I_{n_{i}-1}&{}\\ -k_{i,n_i} &{} \cdots &{} 0\end{array}\right]\), \(K_{i}=[k_{i,1},\ldots ,k_{i,n_i}]^{\mathrm{T}}\).
The observer gain matrix \(K_i\) is choose such that \(A_{i}\) is a Hurwitz matrix. Thus, given a positive definite matrix \(Q_{i}=Q_{i}^T>0\) there exists a positive define matrix \(P_i=P_i^T>0\) such that
According to (6) and (12), the observer errors can be obtained as
where \(\widetilde{X}_i=X_i-\hat{X}_i\) are the observer errors, \(\widetilde{\theta }_{i,j}=\theta _{i,j}^*-\hat{\theta }_{i,j}\), \(\varepsilon _{i}=[\varepsilon _{i,1},\ldots ,\varepsilon _{i,n_i}]^{\mathrm{T}}\), \(\Delta {f}_i=[\Delta {f}_{i,1},\Delta {f}_{i,2},\ldots ,\Delta {f}_{i,n_i}]^{\mathrm{T}}\) and \(\Delta {f}_{i,j}=f_{i,j}(\underline{x}_{i,j})-f_{i,j}(\hat{\underline{x}}_{i,j})\).
Remark 2
Because the states are unmeasured, fuzzy observer is used to estimate the state of the systems. The saturated input saturation value should be appropriate, too large to make the observation inaccurate, too small to achieve the design effect. Equations \({f}_{i,j}(\hat{\underline{x}}_{i,j}|{\widetilde{\theta }}_{i,j})={\widetilde{\theta }}_{i,j}^T\varphi _{i,j}(\hat{\underline{x}}_{i,j})\) and \(\hat{f}_{i,j}(\hat{\underline{x}}_{i,j}|{\theta }_{i,j}^{*})={{\theta }_{i,j}^{*}}^T\varphi _{i,j}(\hat{\underline{x}}_{i,j})\) similar to (11) can be obtained.
The candidate Lyapunov function \(V_0\) is considered as
The time derivative of \(V_0\) along with (15) is
By using Young’s inequality \(2ab\le {a^2+b^2}\), Cauchy–Schwarz inequality \((\sum _{k=1}^{p}a_kb_k)^2\le \sum _{k=1}^{p}(a_k)^2\sum _{k=1}^{p}(b_k)^2\) and\((\sum _{i=1}^{2}\vert {a_i}\vert )^k\le 2^k\sum _{i=1}^{2}(\vert {a_i}\vert )^k\), Assumptions 1, 3 and the fact \(\varphi _{i,j}^T(\hat{\underline{x}}_{i,j})\varphi _{i,j}(\hat{\underline{x}}_{i,j})\le 1\).
The following inequalities can be obtained as
where \(\lambda _{\max }(P_i)\) represents the maximum eigenvalue of the matrix \(P_i\), \(\widetilde{\theta }_i=[\widetilde{\theta }_{i,1},\ldots ,\widetilde{\theta }_{i,n_i}]^{\mathrm{T}}\), \(z_{i,1}=y_i-y_{i,d}\), \(p=\max \{p_{i,j}|1\le {i}\le {N},1\le {j}\le {n_i}\}\) is a known integer, \(q_{ik}=pN2^{2k-1}\sum _{l=1}^{N}\sum _{j=1}^{n_i}(q_{l,j,i}^k)^2\).
Substituting (17)–(19) into (16) yields
where \(\lambda _{i,0}=\frac{1}{2}\lambda _{\min }(Q_{i})-\frac{5}{2}\lambda _{\max }^2(P_{i})-\frac{1}{2}\sum _{j=1}^{n_i}L_{i,j}^2\).
Remark 3
The actual system will always have too large or too small input to make the system unable to work properly, so input saturation is very important in practice. However, the problem of input saturation is not considered in [31,32,33,34,35,36,37]. There are few papers on input saturation, which is also the main contribution of this paper.
3 Control Design and Stability Analysis
In this section, by utilizing adaptive backstepping technique and Lyapunov stability theorem, an observer-based adaptive fuzzy decentralized control approach is developed.
The \(n_i\)-step adaptive fuzzy backstepping output feedback control design is based on the following change of coordinates:
where \(\hbar _i\) will be given at the end.
Stepi, 1 : From (1), (21) and \(x_{i,2}=\widetilde{x}_{i,2}+\hat{x}_{i,2}\), the following equations can be obtained as
Choose the Lyapunov function candidate as
where \(\log {\frac{k_{bi1}^2}{k_{bi1}^2-z_{i,1}^2}}\) defined as a BLF in literature [28], \(\gamma _{i,1}\) and \(\beta _i\) are positive design constants. \(\widetilde{\chi }_{i}=\chi _i-\hat{\chi }_i\) and \(\hat{\chi }_i\) is the estimate of \(\chi _i\). The purpose of designing \(\chi _i=\max _{1\le {k}\le {p}}\{q_{ik}+n_iq_{1ik}\}\) is only for stability analysis.
The derivative of \(V_1\) is
By using Young’s inequality, i.e., the following inequality relationship is satisfied
where \(k_{zij}=\frac{z_{i,j}}{k_{bij}^2-z_{i,j}^2}\)\((j=1)\) and \(q_{1ik}=pN2^{2k-1}\sum _{l=1}^{N}(q_{l,1,i}^k)^2\).
Substituting (25), (26) into (24) yields
where \(\frac{1}{2}\Vert \widetilde{x}_{i,2}\Vert ^2\le \frac{1}{2}\Vert \widetilde{X}_{i}\Vert ^2\) and \(\frac{1}{2}\Vert \varepsilon _{i,1}^*\Vert ^2\le \frac{1}{2}\Vert \varepsilon _{i}^*\Vert ^2\).
Choose the virtual control \(\alpha _{i,1}\), the adaptive function \(\hat{\theta }_{i,1}\) and \({\hat{\chi }}_{i}\) as follows:
where \(\tau _{i,1}>0\), \(\sigma _{i,1}>0\) and \(\overline{\sigma }_i>0\) are the design parameters.
Substituting (28)–(30) into (27) results in
where \(\lambda _{i,1}=\lambda _{i,0}-\frac{1}{2}\) and \(M_{i,1}=\Vert \varepsilon _{i}^*\Vert ^2+\frac{1}{2}\Vert D_i\Vert ^2.\)
This inequality relationship is obviously obtained as
Thus, (31) can be rewritten as
Step\(i,j(j=2,\ldots ,n_i-1):\) The derivative of \(z_{i,j}\) is
Thus, (34) can be rewritten as
where \(H_{i,j}=\hat{\theta }_{i,j}^T\varphi _{i,j}(\hat{\underline{x}}_{i,j})+k_{i,j}\widetilde{x}_{i,1} -\sum _{k=2}^{j-1}\frac{\partial \alpha _{i,j-1}}{\partial {\hat{x}_{i,k}}}\dot{\hat{x}}_{i,k} -\sum _{k=1}^{j-1}\frac{\partial \alpha _{i,j-1}}{\partial {\hat{\theta }_{i,k}}}\dot{\hat{\theta }}_{i,k} -\sum _{k=1}^{j}\frac{\partial \alpha _{i,j-1}}{\partial {y_{i,d}^{(k-1)}}}y_{i,d}^{(k)} -\frac{\partial \alpha _{i,j-1}}{\partial {y}_i}(\hat{x}_{i,2} +\hat{\theta }_{i,1}^T\varphi _{i,1}(\hat{{x}}_{i,1})), (j=2,\ldots ,n_i-1).\)
Consider the following Lyapunov function candidate as
The time derivative of \(V_2\) along with (35), (36) is
By using Young’s inequality, i.e., the following inequalities can be obtained as
Substituting (38)–(42) into (37) yields
Choose the virtual control \(\alpha _{i,j}\) and the adaptive law \(\hat{\theta }_{i,j}\) as
where \(\tau _{i,j}>0\), \(\sigma _{i,j}>0\), \(\gamma _{i,j}>0\).
Similar to inequality (32), one can obtained
Substituting (44)–(46) into (43) yields
where \(\lambda _{i,j}=\lambda _{i,j-1}-\frac{1}{2}\) and \(M_{i,j}=M_{i,j-1}+\frac{1}{2}\Vert \varepsilon _{i}^*\Vert ^2\).
Step\(i,n_i:\) The time derivative of \({z}_{i,n_i}\) along with (12) and (21) is
From (11) and (44), (48) can be written as
where \(H_{i,n_i}=\hat{\theta }_{i,n_i}^T\varphi _{i,n_i}(\hat{\underline{x}}_{i,n_i})+k_{i,n_i}\widetilde{x}_{i,1} -\sum _{k=2}^{n_i-1}\frac{\partial \alpha _{i,n_i-1}}{\partial {\hat{x}_{i,k}}}\dot{\hat{x}}_{i,k} -\sum _{k=1}^{n_i-1}\frac{\partial \alpha _{i,n_i-1}}{\partial {\hat{\theta }_{i,k}}}\dot{\hat{\theta }}_{i,k} -\sum _{k=1}^{n_i}\frac{\partial \alpha _{i,n_i-1}}{\partial {y_{i,d}^{(k-1)}}}y_{i,d}^{(k)} -\frac{\partial \alpha _{i,n_i-1}}{\partial {y}_i}(\hat{x}_{i,2} +\hat{\theta }_{i,1}^T\varphi _{i,1}(\hat{{x}}_{i,1})).\)
Define the dynamic system as
Consider the following Lyapunov function candidate as
Choose actual control input \(v_i\) and the adaptive law \(\dot{\hat{\theta }}_{i,n_i}\) as
where \(\tau _{i,n_i}>0\), \(\sigma _{i,n_i}>0\), \(\gamma _{i,n_i}>0\).
By (51)–(53), the time derivative of \(V_{n_i}\) can be written as
where \(\lambda _{i,n_i}=\lambda _{i,n_i-1}-\frac{1}{2}\) and \(M_{i,n_i}=M_{i,n_i-1}+\frac{1}{2}\Vert \varepsilon _{i}^*\Vert ^2\).
By using Young’s inequality, the following inequalities can be obtained as
Substituting (55), (56) and \(\chi _i=\max _{1\le {k}\le {p}}\{q_{ik}+n_iq_{1ik}\}\) into (54), (54) becomes
where \(\xi _{i,n_i}=\sum _{m=1}^{n_i}\frac{\sigma _{i,m}}{2\gamma _{i,m}}\theta _{i,m}^*{^T}\theta _{i,m}^*+\frac{\overline{\sigma }_{i}}{2\beta _{i}}{\chi }_{i}^2+\sum _{k=1}^{p}(q_{ik}+n_iq_{1ik})(\max _{t\ge 0}\Vert y_{i,d}\Vert ^{2k})+M_{i,n_i}\).
The following theorem is summarized by the above controller design and stability analysis.
Theorem 1
When uncertain large-scale nonlinear systems (1) satisfy assumption 2, if the design positive parameters\(\tau _{i,j}, \sigma _{i,j}\)and\(\gamma _{i,j}\)are appropriately chosen to satisfy\(k_{cij}>\overline{\alpha }_{i,j}+k_{bij}\), \(\overline{\alpha }_{i,j}=\max |\alpha _{i,j}(\hat{x}_{i,j}, \hat{\theta }_{i,j}, y_i, y_{id}^{(k)}), k=1,2,\ldots ,j|\). The proposed adaptive control scheme composed of the controllers\(\alpha _{i,j}, (j=1,\ldots ,n_{i}-1)\), \(v_{i}\)in (28), (44), (52), and the adaptation laws\(\dot{\hat{\theta }}_{i,j}\), \((j=1,\ldots ,n_i)\)and\(\dot{\hat{\chi }}_i\)in (29), (45), (53) and (30) can guarantee
(1) The observer errors are converged on a small neighborhood of the origin and the tracking errors are remained in the bounded compact set;
(2) All the signals in the closed-loop systems are SGUUB;
(3) The full state constraints are not violated.
Proof
According to the inequalities (38), (42) and \(\log (\frac{k_{bij}^2}{k_{bij}^2-z_{i,j}^2})\le {\frac{z_{i,j}^2}{k_{bij}^2-z_{i,j}^2}}\), one can obtain
where \({{\varrho _{i,n_i}}}=\min \{\frac{2\lambda _{i,n_i}}{\lambda _{\max }(P_{i})}, 2\tau _{i,m}, 2\gamma _{i,1}(\frac{\sigma _{i,1}}{2\gamma _{i,1}}-\frac{n_i}{2}), 2\gamma _{i,m}(\frac{\sigma _{i,m}}{2\gamma _{i,m}}-1), \overline{\sigma }_{i}\},(m=2,\ldots ,n_i)\), \(C_{i,n_i}=\frac{\xi _{i,n_i}}{\varrho _{i,n_i}}\) and \({{\varrho _i}} {{=\min \{\varrho _{i,1}, \varrho _{i,2}, \ldots , \varrho _{i,n_i}\}}}\), \(C_i=\min \{C_{i,1}, C_{i,2}, \ldots , C_{i,n_i}\}\), \({\varrho =\min \{\varrho _{1}, \varrho _{2}, \ldots , \varrho _{N}\}}\), \(C=\min \{C_{1}, C_{2}, \ldots , C_{N}\}\).
So (58) can be rewritten as
Multiplying (59) by \(e^{{{\varrho }}{t}}\) on both sides, followed by integrating from \(t_0\) to t, the following inequalities hold
According to (60), \(\frac{k_{bij}^2}{k_{bij}^2-z_{i,j}^2}\le {e^{2(V(t_0)-\frac{C}{{{\varrho }}})e^{-{{\varrho }}{(t-t_0)}}+2\frac{C}{{{\varrho }}}}},\) and \(\frac{1}{2\gamma _{i,j}}\widetilde{\theta }_{i,j}^T\widetilde{\theta }_{i,j}\le {{(V(t_0) -\frac{C}{{{\varrho }}})e^{-{{\varrho }}{(t-t_0)}}+\frac{C}{{{\varrho }}}}}\), the following inequalities are established as
If \(t\rightarrow \infty\), then \(e^{-{{\varrho }}{(t-t_0)}}\rightarrow 0\), it follows from (61), (62), (63) that there exists T, when \(t>T\). In (61), there are \(x_{i,1}=z_{i,1}+y_{i,d}\) and \(|y_{i,d}|\le {a_{i0}}\), so can obtain \(|x_{i,1}|\le {|z_{i,1}|+|y_{i,d}|}<k_{bi1}+a_{i0}<k_{ci1}\). It can be known from the definition of \(\alpha _{i,1}\), it is a function of \(x_{i,1}\), \(y_{i,d}\), \(\dot{y}_{i,d}\), \(\hat{\theta }_{i,1}\). Because the boundedness of \(\hat{\theta }_{i,1}\), \(z_{i,1}\), \(x_{i,1}\), \(\dot{z}_{i,1}\), \(\alpha _{i,1}\) is bounded and satisfies \(|\alpha _{i,1}|\le {\overline{\alpha }_{i,1}}\). Then, \(|\hat{x}_{i,2}|\le {|\alpha _{i,1}|+|z_{i,2}|}\le {\overline{\alpha }_{i,1}}+k_{bi2}=k_{ci2}\). Similarly, it can be proved that \(|\hat{x}_{i,j}|<k_{cij}(j=3,\ldots ,n_i)\). Therefore, the tracking errors are remained in the bounded compact set and the full state constraints are not violated.
From the definition in (60), \(u_{i,n_i}\) is a function of \(\hat{\theta }_{i,n_i}\), \(\hat{x}_{i,n_i}\), \(z_{i,n_i}\), \(\dot{y}_{i,d}\),..., \({y}_{i,d}^{(k)}\) owing to the boundedness of \(\hat{\theta }_{i,n_i}\), \(\hat{x}_{i,n_i}\), \(z_{i,n_i}\), \(\dot{y}_{i,d}\), ..., \({y}_{i,d}^{(k)}\), the controller \(u_{i,n_i}\) is bounded. In (62), there are adaptive laws \(\widetilde{\theta }_{i,j}=\theta _{i,j}^*-\hat{\theta }_{i,j}\) with \(\theta _{i,j}^*\) and \(\hat{\theta }_{i,j}\) are bounded. In (63), the observer errors \(\widetilde{x}_{i,j}\) are also bounded. Therefore, all the closed-loop signals are SGUUB and the appropriate choice parameters can make the observer errors are converged on a small neighborhood of the origin. \(\square\)
Remark 4
The formula \(log(\frac{k_{bij}^2}{k_{bij}^2-z_{i,j}^2})\le {\frac{z_{i,j}^2}{k_{bij}^2-z_{i,j}^2}}\) from the proof can be obtained from Lemma 2 of literature [28]. In addition, a very important choice comes from the proper choice of parameters. Choose the design parameters \(\gamma _{i,j}>0\), \((j = 1,\ldots , n_i)\) and \(\beta _{i}>0\), in (29), (45), (53) and (30), which are used for the \(\sigma\)-modification. According to [34], the appropriate choices of \(\gamma _{i,j}\) and \(\beta _{i}\) can prevent the parameters \(\hat{\theta }_{i,j}\) and \(\hat{\chi }_{i}\) to drift.
Remark 5
In (63), \(\sum _{i=1}^{N}\Vert \widetilde{X}_{i}\Vert ^2\le {\mu }\), with \(\mu>\frac{C}{{{\varrho }}}>0\). The observer errors \(\widetilde{x}_{i,j}\) are converged on a small neighborhood of the origin, so by \(\widetilde{x}_{i,j}=x_{i,j}-\hat{x}_{i,j}\) and \(x_{i,j}=\hat{x}_{i,j}+\widetilde{x}_{i,j}\le {k_{cij}}+\mu\) can be known that the system’s full state constraints are satisfied.
4 Simulation Example
In this section, the effectiveness and the control performances of the proposed decentralized control method are illustrated via the following two examples.
Example 1
Consider two inverted pendulum models connected by a spring and set an input \(\upsilon _i\) at the base. The schematic of the two inverted pendulum models is shown in Fig. 2. It is only assumed that \(\Theta _i\) are available to the ith controller for \(i=1,2\). Let \(\Theta _1=x_{1,1}\), \(\Theta _2=x_{2,1}\), \(\dot{\Theta }_1=x_{1,2}\), \(\dot{\Theta }_2=x_{2,2}\); then, the inverted pendulum equation can be described as
where\(f_{1,1}(x_{1,1})=0\), \(\Delta _{1,1}(y_1(t),y_2(t))=0\), \(f_{1,2}(x_{1,1},x_{1,2})=(\frac{m_1gr}{J_1}-\frac{Kr^2}{4J_1})\sin (x_{1,1})\), \(\Delta _{1,2}(y_1(t), y_2(t))=\frac{Kr^2}{4J_1}\sin (x_{2,1})\), \(f_{2,1}(x_{2,1})=0\), \(\Delta _{2,1}(y_1(t),y_2(t))=0\), \(f_{2,2}(x_{2,1},x_{2,2})=(\frac{m_2gr}{J_2}-\frac{Kr^2}{4J_2})\sin (x_{2,1})\), \(\Delta _{2,2}(y_1(t),y_2(t))=\frac{Kr^2}{4J_2}\sin (x_{1,1})\).
Here, \(\Theta _1\) and \(\Theta _2\) are the angular displacements of the pendulums form vertical. The parameters \(m_1=2\) kg and \(m_2=2.5\) kg are the pendulum end mass, \(J_1=5\) kg and \(J_2=6.25\) kg are the moments of inertia, \(K=100\) N/m is the spring constant of the connecting spring, \(r=0.5\) m is the pendulum height, \(l=0.5\) m is the natural length of the spring and \(g=9.81{\mathrm{m/s}}^2\) is the gravitational acceleration. The distance between the pendulum hinges is defined as \(b=0.5\) m. The given reference tracking signal is \(y_{1,d} =\sin (t)\), \(y_{2,d} =\sin (t)\). The states of the systems are \(|x_{1,1}|=|y_1|\le {k_{c11}=1.2}\), \(|x_{2,1}|=|y_2|\le {k_{c21}=1.2}\), \(|x_{1,2}|\le 1.5\), \(|x_{2,2}|\le 1.5\).
The input functions \(u_i(v_{i}(t))\) are represented in (2), where \(u_{iM}=3\), \(i=1,2\). According to (11), to construct the fuzzy logic systems \(\hat{f}_{1,2}(\hat{\underline{x}}_{1,2}|\hat{\theta }_{1,2})=\hat{\theta }_{1,2}^T\varphi _{1,2}(\hat{\underline{x}}_{1,2})\) and \(\hat{f}_{2,2}(\hat{\underline{x}}_{2,2}|\hat{\theta }_{2,2})=\hat{\theta }_{2,2}^T\varphi _{2,2}(\hat{\underline{x}}_{2,2})\) are obtained. The design parameters \(k_{11}=10\), \(k_{12}=200\), \(k_{21}=5\), \(k_{22}=150\) are in the fuzzy observer (12).
By setting the control parameter \(\tau _{1,1}=4\), \(\tau _{1,2}=10\), \(\tau _{2,1}=3\), \(\tau _{2,2}=15\), \(k_{b11}=0.5\), \(k_{b21}=0.4\), \(k_{b12}=k_{b22}=0.5\), \(\gamma _{1,1}=\gamma _{1,2}=\gamma _{2,1}=\gamma _{2,2}=0.1\), \(\sigma _{1,1}=\sigma _{1,2}=\sigma _{2,1}=\sigma _{2,2}=10\), \(\overline{\sigma }_1=\overline{\sigma }_2=0.1\), \(\beta _1=\beta _2=1\), \(p=2\). Then, virtual controllers and the actual control are designed as following
and adaptive laws as follows:
where \(H_{1,2}\), \(H_{2,2}\) and \(\hbar _i\) in (35), (49) and (50), \(i=1,2\).
The initial conditions of states are chosen as \(x_{1,1}(0)=0.05\) and \(x_{1,2}(0)=0.3\), \(x_{2,1}(0)=0.05\) and \(x_{2,2}(0)=0.2\), the others initial values are chosen as zeros. The simulation results are shown in Figures 3, 4, 5, 6, 7, 8, 9, 10, 11, 12 and 13. Where Figure 3 shows the response trajectories of control output \(y_{i}\) (state variable \(x_{i,1}\)) and the desired reference tracking signal \(y_{i,d}\). Figures 4 and 5 represented show the response trajectories of \(z_{i,1}\) and \(z_{i,2}\), respectively. It is obviously that \(z_{i,1}\) and \(z_{i,2}\) are constrained within the given space with proposed approach. However, if the state constraint is removed, the tracking error \(z_{i,1}\) is worse in Figure 4, and the tracking error \(z_{i,2}\) cannot be constrained on a given threshold in Fig. 5. Figures 6 and 7 show the trajectories of the states of the systems and the states estimated, respectively. It can be seen from these figures that the full state constraints are not violated. The observer errors trajectories are shown in Figs. 8 and 9, respectively. Figures 10 and 11 show the trajectories of the control input and input saturation. In order to make the input saturation function \({\mathrm{sat}}(v_1)\) and \({\mathrm{sat}}(v_2)\) became the smooth function, Figs. 12 and 13 given the response trajectories of their the auxiliary functions \(g_1(v_1)\) and \(g_2(v_2)\), respectively. From these figures, it is guaranteed that the controller proposed in this paper can make the systems stable and the constrained states are not violated.

Two inverted pendulums connected by a spring of Example 1

Responses of \(y_{i,d}\), \(y_{i}\) of Example 1

Responses of \(z_{i,1}\) of Example 1

Responses of \(z_{i,2}\) of Example 1

Responses of \(x_{i,1}\), \(\hat{x}_{i,1}\) of Example 1

Responses of \(x_{i,2}\), \(\hat{x}_{i,2}\) of Example 1

Responses of \(e_{i,1}\) of Example 1

Responses of \(e_{i,2}\) of Example 1

Responses of \(v_{1}\), \({\mathrm{sat}}(v_1)\) of Example 1

Responses of \(v_{2}\), \({\mathrm{sat}}(v_2)\) of Example 1

Responses of \(g_{1}(v_1)\) of Example 1

Responses of \(g_{2}(v_2)\) of Example 1

Johansson’s quadruple-tank process diagram of Example 2

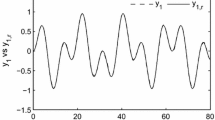
Responses of \(y_{i,d}\), \(y_{i}\) of Example 2
Example 2
We present in what follows another practical example illustrating the effectiveness of the technique proposed. We select a quadruple-tank model from [35] and [43] describing a large-scale nonlinear systems consisting of four interconnected water tanks and two pumps through a selector value, which is connected to two different pumps. The schematic of the quadruple-tank equipment is shown in Fig. 14. The water flows from tanks 3 and 4 into tanks 1 and 2, respectively, and from these two tanks to a reservoir.
A continuous-time state-space model of the quadruple-tank process system can be derived from first principles [43] to result in
where \(h_i\) and \(a_i\) with \(i = 1, 2, 3, 4\) refer to the water level and the discharge constant of tank i, respectively, S is the cross section of the tanks. \(q_j\) and \(\gamma _j\) with \(j = a, b\) denote the flow and the ratio of the three-way valve of pump j, respectively. g is the gravitational acceleration.
Defining the deviation variables \(x_{1,1}=\varsigma _4(h_2-h^0_2)\), \(x_{1,2}=h_4-h^0_4\), \(x_{2,1}=\varsigma _3(h_1-h^0_1)\), \(x_{2,2}=h_3-h^0_3\), \(u_1=\frac{S}{1-\gamma _a}(q_a-q^0_a)\) and \(u_2=\frac{S}{1-\gamma _b}(q_b-q^0_b)\). We obtain the following decentralized model (see [35] for details):
where \(h^0_i\) denotes the linearization level of tank i, \(q^0_j\) denotes the linearization flow of \(q_j\), \(\varsigma _i=S/a_i\sqrt{2h^0_i/g}\), \(i = 1, 2, 3, 4\). Some important system values are given as \(S=0.06\,{\mathrm{m}}^2\), \(a_1 = 1.31\,{\mathrm{{e}}}^{-4}\,{\mathrm{m}}^2\), \(a_2=1.507\,{\mathrm{e}}^{-4}\,{\mathrm{m}}^2\), \(a_3=9.267\,{\mathrm{e}}^{-5}\,{\mathrm{m}}^2\), \(a_4=8.816\,{\mathrm{e}}^{-5}\,{\mathrm{m}}^2\), \(h^0_1=0.6534\,{\mathrm{m}}\), \(h^0_2=0.6521\) m, \(h^0_3=0.6594\) m, \(h^0_4=0.6587\) rm m, \(\gamma _a=0.3\), \(\gamma _b=0.4\), \(q^0_a=1.63\,{\mathrm{m}}^3{\mathrm{/h}}\), \(q^0_b=2.0\,{\mathrm{m}}^3{\mathrm{/h}}\), \(g=9.8\,{\mathrm{m/s}}^2\). More detailed parameters are given in [43] of Table 1.
Based on the derivation of reference [35] and similar example 1, the decentralized output feedback controller and the update laws were designed as
where the virtual controllers \(\alpha _{1,1}=-\tau _{1,1}z_{1,1}-5k_{z11}/4-(k_{b11}^2-z_{1,1}^2)\hat{\chi }_{1}\sum _{k=1}^{p}2^{2k}(z_{1,1})^{2k-1}+{\varsigma _4 x_{1,1}}/{\varsigma _2}+\dot{y}_{1,d}\) and \(\alpha _{2,1}=-\tau _{2,1}z_{2,1}-5k_{z21}/4-(k_{b21}^2-z_{2,1}^2)\hat{\chi }_{2}\sum _{k=1}^{p}2^{2k}(z_{2,1})^{2k-1}+{\varsigma _3 x_{2,1}}/{\varsigma _1}+\dot{y}_{2,d}\). \(H_{1,2}=f_{1,2}(\hat{\underline{x}}_{1,2})+k_{1,2}\widetilde{x}_{1,1} -\sum _{k=1}^{2}\frac{\partial \alpha _{1,1}}{\partial {y_{1,d}^{(k-1)}}}y_{1,d}^{(k)} -\frac{\partial \alpha _{1,1}}{\partial {y}_1}(\hat{x}_{1,2}+{\varsigma _4 x_{1,1}}/{\varsigma _2})\) and \(H_{2,2}=f_{2,2}(\hat{\underline{x}}_{2,2})+k_{2,2}\widetilde{x}_{2,1} -\sum _{k=1}^{2}\frac{\partial \alpha _{2,1}}{\partial {y_{2,d}^{(k-1)}}}y_{2,d}^{(k)} -\frac{\partial \alpha _{2,1}}{\partial {y}_2}(\hat{x}_{2,2}+{\varsigma _3 x_{2,1}}/{\varsigma _1})\).
The given reference tracking signals are \(y_{1,d} =0.5\sin (0.5t)+0.5\sin (t)\), \(y_{2,d} =\sin (0.5t)\sin(t)\). The states of the systems are \(|x_{1,1}|=|y_1|\le {k_{c11}=1.5}\), \(|x_{2,1}|=|y_2|\le {k_{c21}=1.5}\), \(|x_{1,2}|\le 2.0\), \(|x_{2,2}|\le 2.0\). And by setting the control parameter \(\tau _{1,1}=13\), \(\tau _{1,2}=10\), \(\tau _{2,1}=12\), \(\tau _{2,2}=10\), \(k_{b11}=0.6\), \(k_{b21}=0.8\), \(k_{b12}=1.1\), \(k_{b22}=1.4\), \(u_{1M}=3\), \(u_{2M}=2\), \(\overline{\sigma }_1=\overline{\sigma }_2=0.1\), \(\beta _1=\beta _2=1\), \(p=2\). The simulation results are shown in Figs. 15, 16, 17 and 18 with the initial conditions of states \([x_{1,1}(0),x_{1,2}(0)]^{\mathrm{T}}=[0.1,0.3]^{\mathrm{T}}\), \([x_{2,1}(0),x_{2,2}(0)]^{\mathrm{T}}=[0.1,0.1]^{\mathrm{T}}\), \([\hat{x}_{1,1}(0),\hat{x}_{1,2}(0)]^{\mathrm{T}}=[-0.1,0.1]^{\mathrm{T}}\), \([\hat{x}_{2,1}(0),\hat{x}_{2,2}(0)]^{\mathrm{T}}=[-0.1,0]^{\mathrm{T}}\), the others initial values are chosen as zeros.
Figure 15 shows the response trajectories of control output \(y_{i}\) (state variable \(x_{i,1}\)) and the desired reference tracking signal \(y_{i,d}\). Figures 16 and 17 show the trajectories of the states of the systems and the states estimated, respectively. It can be seen from these figures that the full state constraints are not violated. Figures 18 and 19 show the trajectories of the control input and input saturation. From these figures, it is guaranteed that the controller proposed in this paper can make the systems stable and the constrained states are not violated.

Responses of \(x_{i,1}\), \(\hat{x}_{i,1}\) of Example 2

Responses of \(x_{i,2}\), \(\hat{x}_{i,2}\) of Example 2

Responses of \(v_{1}\), \({\mathrm{sat}}(v_1)\) of Example 2

Responses of \(v_{2}\), \({\mathrm{sat}}(v_2)\) of Example 2
5 Conclusion
In this paper, observer-based adaptive fuzzy decentralized control has been proposed for a class uncertain large-scale nonlinear system with full state constraints, input saturation and unmeasured states. The fuzzy observers have been designed to estimate the unmeasurable states. The auxiliary design functions have been used to replace the input saturation, and the BLFs have been used to constrain the full state constraints. Finally, by utilizing adaptive backstepping design technique and Lyapunov stability theorem, an observer-based adaptive fuzzy decentralized control approach has been developed. It has been proved that all the signals of the closed-loop systems are SGUUB, the tracking error remains in the bounded compact set, and the constrained states are not violated. Further research is needed to design adaptive dynamic surface control for large-scale nonlinear delay systems with the full state constraints.
References
Jiang, Z.P., Hill, D.J.: A robust adaptive backstepping scheme for nonlinear systems with unmodeled dynamics. IEEE Trans. Autom. Control 44(9), 1705–1711 (1999)
Liu, X., Gu, G., Zhou, K.: Robust stabilization of MIMO nonlinear systems by backstepping. Automatica 35(5), 987–992 (1999)
Yih-Guang, : Backstepping nonlinear control using nonlinear parametric fuzzy systems. Int. J. Fuzzy Syst. 11(4), 225–231 (2009)
Ge, S.S., Li, G.Y., Zhang, J., Lee, T.H.: Direct adaptive control for a class of MIMO nonlinear systems using neural networks. IEEE Trans. Autom. Control 49(11), 2001–2006 (2004)
Kamalasadan, S., Ghandakly, A.A.: A neural network parallel adaptive controller for dynamic system control. IEEE Trans. Inst. Meas. 56(5), 1786–1796 (2007)
Wang, H., Liu, K., Liu, X., Chen, B., Lin, C.: Neural-based adaptive output-feedback control for a class of nonstrict-feedback stochastic nonlinear systems. IEEE Trans. Cybern. 45(9), 1977–1987 (2017)
Zhai, D., An, L., Dong, J., Zhang, Q.: Switched adaptive fuzzy tracking control for a class of switched nonlinear systems under arbitrary switching. IEEE Trans. Fuzzy Syst. 26(99), 585–597 (2017)
Hsueh, Y.C., Su, S.F.: Adaptive fuzzy sliding controller design with approximate error feedback. IEEE Trans. Fuzzy Syst. 11(1), 36–43 (2009)
Chen, B., Liu, X., Liu, K., Lin, C.: Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 45(6), 1530–1535 (2009)
Zhai, D., Lu, A.Y., Li, J.H., Zhang, Q.L.: Simultaneous fault detection and control for switched linear systems with mode-dependent average dwell-time. Appl. Math. Comput. 273, 767–792 (2016)
Zhai, D., An, L., Ye, D., Zhang, Q.: Adaptive reliable \(H_\infty\) static output feedback control against markovian jumping sensor failures. IEEE Trans. Neural Netw. Learn Syst. 29(99), 1–14 (2018)
Zhai, D., An, L., Dong, J., Zhang, Q.: Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems. Automatica 97, 48–57 (2018)
Zhang, Z., Xu, S., Zhang, B.: Asymptotic tracking control of uncertain nonlinear systems with unknown actuator nonlinearity. IEEE Trans. Autom. Control 59(5), 1336–1341 (2014)
Zhang, Z., Xu, S., Zhang, B.: Exact tracking control of nonlinear systems with time delays and dead-zone input. Automatica 52(52), 272–276 (2015)
Yu, J.: Adaptive fuzzy stabilization for a class of pure-feedback systems with unknown dead-zones. Int. J. Fuzzy Syst. 15(3), 289–296 (2013)
Liu, Z., Wang, F., Zhang, Y.: Adaptive visual tracking control for manipulator with actuator fuzzy dead-zone constraint and unmodeled dynamic. IEEE Trans. Syst Man. Cybern. Syst. 45(10), 1301–1312 (2017)
Wen, C., Zhou, J., Liu, Z., Su, H.: Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance. IEEE Trans. Autom. Control 56(7), 1672–1678 (2011)
Mou, C., Gang, T., Jiang, B.: Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans. Neural Netw. Learn Syst. 26(9), 2086–2097 (2015)
Tingi, C.S.: A robust fuzzy control approach to stabilization of nonlinear time-delay systems with saturating inputs. Int. J. Fuzzy Syst. 10(1), 50–60 (2008)
Zhou, Q., Wang, L., Wu, C., Li, H., Du, H.: Adaptive fuzzy control for nonstrict-feedback systems with input saturation and output constraint. IEEE Trans. Syst. Man Cybern. Syst. 47(1), 1–12 (2017)
Chen, M., Ge, S.S., Ren, B.: Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica 47(3), 452–465 (2011)
Zhou, Q., Shi, P., Tian, Y., Wang, M.: Approximation-based adaptive tracking control for MIMO nonlinear systems with input saturation. IEEE Trans. Cybern. 45(10), 2119–2128 (2015)
Li, Y., Tong, S.: Adaptive fuzzy output constrained control design for multi-input multioutput stochastic nonstrict-feedback nonlinear systems. IEEE Trans. Cybern. 47(12), 4086–4095 (2017)
Li, Y., Tong, S., Li, T.: Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation. Fuzzy Sets Syst. 248, 138–155 (2014)
Zhang, T., Xia, M., Yi, Y.: Adaptive neural dynamic surface control of strict-feedback nonlinear systems with full state constraints and unmodeled dynamics. Automatica 81, 232–239 (2017)
Liu, Y.J., Tong, S.: Barrier Lyapunov functions-based adaptive control for a class of nonlinear pure-feedback systems with full state constraints. Automatica 64, 70–75 (2016)
Kim, B.S., Yoo, S.J.: Approximation-based adaptive control of uncertain non-linear pure-feedback systems with full state constraints. IET Control Theory Appl. 8(17), 2070–2081 (2014)
Wang, C., Wu, Y., Yu, J.: Barrier lyapunov functions-based dynamic surface control for pure-feedback systems with full state constraints. IET Control Theory Appl. 11(4), 524–530 (2017)
Sun, W., Yuan, W., Shao, Y., Sun, Z., Zhao, J., Sun, Q.: Adaptive fuzzy control of strict-feedback nonlinear time-delay systems with full-state constraints. Int. J. Fuzzy Syst. 20(8), 2556–2565 (2018)
Yi, J., Li, J., Li, J.: Adaptive fuzzy output feedback control for nonlinear nonstrict-feedback time-delay systems with full state constraints. Int. J. Fuzzy Syst. 20, 1730–1744 (2018)
Jain, S., Khorrami, F.: Decentralized adaptive output feedback design for large-scale nonlinear systems. IEEE Trans. Autom. 42(5), 729–735 (1997)
Jain, S., Khorrami, F.: Decentralized adaptive output feedback control of large scale interconnected nonlinear systems. Proc. Am. Control Conf. 3, 1600–1604 (1995)
Tong, S., Sun, K., Sui, S.: Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 26, 569–584 (2017)
Tong, S., Huo, B., Li, Y.: Observer-based adaptive decentralized fuzzy fault-tolerant control of nonlinear large-scale systems with actuator failures. IEEE Trans. Fuzzy Syst. 22(1), 1–15 (2014)
Long, L., Zhao, J.: Decentralized adaptive fuzzy output-feedback control of switched large-scale nonlinear systems. IEEE Trans. Fuzzy Syst. 23(5), 1844–1860 (2015)
Sun, K., Sui, S., Tong, S.: Fuzzy adaptive decentralized optimal control for strict feedback nonlinear large-scale systems. IEEE Trans. Cybern. 48(4), 1326–1339 (2018)
Tong, S., Li, Y.: Adaptive fuzzy decentralized output feedback control for nonlinear large-scale systems with unknown dead-zone inputs. IEEE Trans. Fuzzy Syst. 21(5), 913–925 (2013)
Jin, X.Z., Yang, G.H.: Adaptive robust tracking control for a class of distributed systems with faulty actuators and interconnections. In: American Control Conference, pp. 5528–5533 (2009)
Kim, H.O., Yoo, S.J.: Decentralised disturbance-observer-based adaptive tracking in the presence of unmatched nonlinear time-delayed interactions and disturbances. Int. J. Syst. Sci. 49, 1–15 (2018)
Si, W., Dong, X., Yang, F.: Decentralized adaptive neural control for interconnected stochastic nonlinear delay-time systems with asymmetric saturation actuators and output constraints. J. Frankl. Inst. 355, 54–80 (2018)
Li, H., Zhang, X., Liu, Q.: Adaptive output feedback control for a class of large-scale output-constrained non-linear time-delay systems. IET Control Theory Appl. 12(1), 174–181 (2018)
Zhou, Q., Wu, C., Shi, P.: Observer-based adaptive fuzzy tracking control of nonlinear systems with time delay and input saturation. Fuzzy Sets Syst. 316, 49–68 (2016)
Alvarado, I., Limon, D., Pena, D.M.D.L., Maestre, J.M., Ridao, M.A., Scheu, H., Marquardt, W., Negenborn, R.R., Schutter, B.D., Valencia, F.: A comparative analysis of distributed MPC techniques applied to the HD-MPC four-tank benchmark. J. Proc. Control 21(5), 800–815 (2011)
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grants 61873056, 61473068, 61273148, 61621004 and 61420106016, the Fundamental Research Funds for the Central Universities in China under Grant N170405004, and the Research Fund of State Key Laboratory of Synthetical Automation for Process Industries in China under Grant 2013ZCX01.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zhang, Q., Zhai, D. & Dong, J. Observer-Based Adaptive Fuzzy Decentralized Control of Uncertain Large-Scale Nonlinear Systems with Full State Constraints. Int. J. Fuzzy Syst. 21, 1085–1103 (2019). https://doi.org/10.1007/s40815-018-0595-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-018-0595-z