
Abstract
This manuscript presents a theoretical and numerical analysis to achieve compound synchronization of four non-identical chaotic systems for different multi-switching states. Multi-switching compound synchronization is achieved for three drive systems and one response system via active backstepping technique. By using Lyapunov stability theory, asymptotically stable synchronization states are established. To elaborate the considered scheme an example of Pehlivan system, Liu system, Qi system and Lu system is discussed. The conclusions drawn from computational and analytical approaches are in excellent agreement.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Chaotic phenomenon exhibits typical and complex behavior of a dynamical system which evolves with time. Due to unpredictable behavior of chaotic and hyperchaotic systems, synchronization has always been an interesting problem for researchers. In last few decades, laser [1], neural network [2], ecology [3], secure communication [4] are some fields witnessing the utility of synchronization.
Although there are several other fields too where chaos synchronization is being used as a tool. But since last three decades secure communication has been one of the most engrossing field for which new synchronization schemes [5, 6] have been studied to make the communication more reliable. New methodologies [7,8,9,10] have been proposed to attain synchronization. Speedy growth has been seen in the area of chaos synchronization after 1990, when Pecora and Carroll [11] accomplished synchronization for chaotic systems.
After the valuable work of Pecora and Carroll, synchronization has also been achieved for more than one drive and one response systems like combination, combination-combination, compound combination synchronization, compound and double compound synchronization [12,13,14,15,16,17] etc. Compound synchronization has also been achieved for some integer order and fractional order systems [18].
Combination synchronization and compound synchronization have been studied by the researchers for secure communication [19, 20]. The security of information transmission can be enhanced by using more than one drive systems as information signal can be dissevered with different signals of drive systems. Whereas two drive systems are being used in scheme of combination synchronization [19] to enhance security, in compound synchronization [20] a scaling drive system additionally increases grade of security.
In recent years, the field of multi-switching synchronization has attracted attention of researchers. After the outstanding work of Ucar [21], several researches have been done on multi-switching synchronization. Ucar achieved multi-switching synchronization for two identical systems via active control while Wang and Sun [22] achieved multi-switching synchronization for two non-identical systems for fully unknown parameters by using adaptive control method.
Multi-switching synchronization has also been achieved by Ajayi et al. [23] for identical chaotic systems. Recently, Vincent et al. [24] has defined a new type of multi-switching synchronization which provides more degree of freedom to state variables to create error vector in different manner. Multi-switching combination synchronization has been investigated by Vincent et al. [24] and Zheng [25] by using different approaches. Complexity of multi-switching synchronization inolving more than one drive systems has its own advantage in secure communication [24, 25].
In the work mentioned above, multi-switching synchronization has been achieved either between two chaotic systems or combination of three chaotic systems. Motivated from aforementioned work, the problem of multi-switching compound synchronization of four chaotic systems has been considered in this paper which is still an open problem. In the proposed scheme three systems have been considered as drive systems and one system has been considered as response system. Multi-switching combination synchronization can be achieved as a particular case of the proposed synchronization scheme. Active backstepping method has been applied to achieve the desired synchronization. Amongst different synchronization methods active backstepping technique is one of the most efficient methods to attain synchronization. Numerous different type of synchronizations [15, 24, 26, 27] have been achieved by using this approach.
Although in order to demonstrate the proposed scheme chaotic systems can be chosen arbitrarily, but this approach is explored by using four non-identical chaotic systems, where Pehlivan [28], Liu [29] and Qi [30] systems are considered as drive systems and Lu system [31] is considered as response system. A number of multi-switching states are possible by choosing different combinations of state variables but due to complexity of calculations only three have been discussed in this paper.
This paper is divided in five sections. In Sect. 2 problem of multi-switching compound synchronization is formulated. In Sect. 3 different multi-switching states and construction of controllers are described for the systems considered. In Sect. 4 computational results are given. In Sect. 5 the results achieved by this work and further possible developments are discussed in brief.
2 Problem statement
Suppose first, second and third drive systems are
respectively. The corresponding response system with controller is
where \(x=(x_{1},x_{2},\ldots ,x_{n})^{T}, y=(y_{1},y_{2},\ldots ,y_{n})^{T}, z=(z_{1}, z_{2},\ldots ,z_{n})^{T}, w=(w_{1},w_{2},\ldots ,w_{n})^{T}\) are real state vectors of drive and response systems. \(V_i:{\mathbb {R}}^{n}\rightarrow {\mathbb {R}}, i=1,2,\ldots , n\) are nonlinear control functions and \(g_{i1}, g_{i2}, g_{i3},g_{i4}:{\mathbb {R}}^{n}\rightarrow \mathbb R,i=1,2,\ldots , n\) are continuous vector functions.
Let \(X\! =\! diag(x_{1}, x_{2},\ldots , x_{n}), Y\! =diag(y_{1}, y_{2},\ldots , y_{n}), Z=diag(z_{1}, z_{2},\ldots ,z_{n}), W=diag(w_{1},w_{2},\ldots , w_{n})\) be n dimensional diagonal matrices, we will define compound synchronization as follows:
Definition 1
[17] If there exist four constant diagonal matrices \( P,Q,R,S\in \mathbb {R}^n \times \mathbb {R}^n \) and \(P \ne 0\) such that the error function E fulfills the following condition:
where \(\Vert .\Vert \) is matrix norm, then the drive systems (1),(2),(3) are realized compound synchronization with the response system (4).
Remark 1
[17] The way X, Y, Z, W are defined, it is obvious that \(E = diag(\sigma _{1111}, \sigma _{2222}, \ldots , \sigma _{nnnn})\) is a diagonal matrix. For the error matrix \(E = diag(\sigma _{1111}, \sigma _{2222}, \ldots , \sigma _{nnnn})= PW-QX(RY+SZ),\) right multiplying both sides by a vector \( A= {[1, 1,\ldots , 1]^{T}}_{n\times 1},\) we acquire \(E^{*}= (\sigma _{1111}, \sigma _{2222},\ldots , \sigma _{nnnn})^{T} = [PW-QX(RY+SZ)]A\).
Remark 2
If \(P=diag (p_1, p_2,\ldots ,p_n), Q=diag (q_1, q_2, \ldots ,q_n), R\!\!=diag (r_1, r_2,\ldots ,r_n), S\!=diag (s_1, s_2,\ldots ,s_n)\), then the components of the error vector \(E^{*}\) are obtained as
where indices of the error states are strictly chosen as \(i=j=k=l,\) and \((i,j,k,l) \in (1,2,\ldots ,n).\)
Definition 2
If the error states in relation to Definition 1 are redefined such that \( i= j=k=l, \) is not satisfied, where \((i,j,k,l) \in (1,2,\ldots ,n)\) and
then the drive systems (1),(2),(3) are said to achieve multi-switching compound synchronization with the response system (4).
In order to formulate the problem in an easy way, suppose (1), (2), (3), (4) are assumed to be three dimensional systems. Defining an arbitrary multi-switching state for three dimensional systems as follows:
The error dynamics is
On using (1), (2), (3), (4) in previous equation, we get
By active backstepping method this system will be transformed into a new system for which (0, 0, 0) equilibrium point will be asymptotically stable. Suppose \(l_1=\sigma _{1233}\) and \(\sigma _{2312}=\zeta (l_1)\) is assumed as a virtual controller. Then, differentiating \(l_1\) yields:
where \(h_1\) is a nonlinear function containing the terms of drive and response systems.
Suppose \(K_1=l_1^{2}\) is the Lyapunov function for \(l_1\) subsystem (11). Then virtual controller \( \zeta (l_1) \) will be designed in such a way that \(\dot{K}_1\) will be negative definite and \(l_1\) subsystem will be asymptotically stabilized.
Define the error between \(\sigma _{2312}\) and \(\zeta (l_1)\) as \(\sigma _{2312}-\zeta (l_1)=l_2.\) Now, \(\sigma _{3121}\) will be considered as a virtual controller. Then \((l_1,l_2)\) subsystem will be
where \(h_2\) is a nonlinear function containing the terms of drive and response systems. The same process will be repeated to stabilize the \((l_1,l_2)\) subsystem, until an asymptotically stable \((l_1,l_2,l_3)\) system will be achieved. At each step a positive definite Lyapunov function with negative definite derivative will ensure the asymptotical stability of each subsystem.
3 Multi-switching compound synchronization of four non-identical systems
Pehlivan system [28] is considered as first drive system (scaling system). Dynamics of Pehlivan system is given below
Pehlivan system exhibits chaotic behavior for \(\lambda _1=0.5, \mu _1=0.5. \) Liu system [29] is considered as second drive system. Dynamics of Liu system is given by
Liu system exhibits chaotic behavior for \(\lambda _2=10, \mu _2=40, \rho _2=2.5, \delta _2=4 \). Qi system [30] is considered as third drive system given by
Qi system exhibits chaotic behavior for \(\lambda _3=14, \mu _3=43, \rho _3=-1, \delta _3=16, \theta _3=4 \). Lu system [31] is considered as response system. Lu system with controller is
where \(V_1,V_2,V_3\) are the controllers which are designed to achieve the multi-switching compound synchronization. Lu system exhibits chaotic behavior for \(\lambda _4=36, \mu _4 =3, \rho _4=20 \). The following three multi-switching states are considered during the discussion:
Switch One
Switch Two
Switch Three
Now, the controllers will be constructed for switch one.
Theorem 1
If the control functions are defined as follows:
where
and \(l_1=\sigma _{1211},l_2=\sigma _{2331},l_3=\sigma _{3121}\), then response system (16) will be in the state of multi-switching compound synchronization with drive systems (13), (14) and (15).
Proof
From Eq. (17), we have
By using Eq. (13),(14),(15) and (16) in (22), we get
Let \(l_1 = \sigma _{1211}\). Then, from Eq. (23)
where \(\sigma _{2331}=\zeta (l_1)\) is regarded as the virtual controller. Active backstepping is a recursive feedback procedure, therefore to stabilize the \(l_1\) subsystem we will design the virtual controller \(\zeta (l_1)\). Suppose Lyapunov function for \(l_1\) subsystem is defined as
Then derivative of \(K_1\) will be
Suppose \(\zeta (l_1)=0\). Then by using value of \(V_1\) from (20), we get \(\dot{K}_1= -l_1^{2}\) which is negative definite. Hence \(l_1\) subsystem will be asymptotically stable. Suppose the error between \(\sigma _{2331}\)and \(\zeta (l_1)\) is \(l_2=\sigma _{2331}-\zeta (l_1)\). Then \((l_1,l_2)\) subsystem will be
where \(\sigma _{3121}= \zeta (l_1,l_2)\) is assumed as a virtual controller. In order to stabilize \((l_1,l_2)\) subsystem Lyapunov function is defined as
Then, derivative of \(K_2\) will be
By using the value of \(V_2\) from Eq. (20), derivative of \(K_2\) with respect to t will be
which is negative definite which ensures asymptotic stability of \((l_1,l_2)\) subsystem. Suppose error between \(\sigma _{3121}\) and \(\zeta (l_1,l_2) \) is defined as \(l_3= \sigma _{3121}-\zeta (l_1,l_2)\). Then
In order to stabilize the full dimensional \((l_1, l_2, l_3)\) system consider the following Lyapunov function:
Then derivative of \(K_3\) will be
Using the value of \(V_3\) from Eqs. (20), (33) reduces to
which is negative definite. Hence the equilibrium point (0, 0, 0) of system \((l_1,l_2,l_3)\) given by
will be asymptotically stable . Thus, asymptotically stable synchronization state is attained by response system and drive systems. \(\square \)
Corollary 1
If \(x_1=x_2=x_3=\alpha \) ,then the problem is reduced to multi-switching combination synchronization of systems (14), (15) and (16). The corresponding controllers are
Corollary 2
If \(x_1=x_2=x_3=\alpha \) and \(r_1=r_2=r_3=0,\) then the problem is reduced to multi-switching hybrid projective synchronization of systems (15) and (16). The corresponding controllers are
Corollary 3
If \(x_1=x_2=x_3=\alpha \) and \(s_1=s_2=s_3=0,\) then the problem is reduced to multi-switching hybrid projective synchronization of systems (14) and (16). The corresponding controllers are

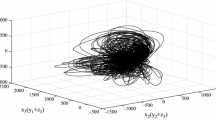
a Synchronization for \(w_1\) and \(x_2(y_1+z_1)\) b synchronization for \(w_2\) and \(x_3(y_3+z_1)\) in switch one

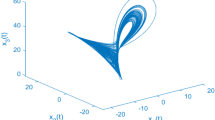
a Synchronization for \(w_3\) and \(x_1(y_2+z_1)\) in switch one b errors \(\sigma _{1211},\sigma _{2331},\sigma _{3121}\) converging to zero in switch one

a Anti-synchronization for \(w_1\) and \(x_1(y_2+z_2)\) b anti-synchronization for \(w_2\) and \(x_1(y_1+z_1)\) in switch two
Corollary 4
If \(q_1=q_2=q_3=0\) or \(r_1=r_2=r_3=s_1=s_2=s_3=0,\) then the problem of compound synchronization is reduced to the problem of controlling the system (16). The controllers are as follows:
for which equilibrium point (0, 0, 0) will be asymptotically stable.
Theorem 2
Response system (16) will attain a state of multi-switching compound synchronization with drive system (13), (14), (15) for errors defined by (18), if the controllers are designed as follows:

a Anti-synchronization for \(w_3\) and \(x_1(y_3+z_3)\) in switch two b errors \(\sigma _{1122},\sigma _{2111},\sigma _{3133}\) converging to zero in switch two

a Synchronization for \(w_1\) and \(3x_2(y_1+2z_3)\) b synchronization for \(w_2\) and \(3x_3(y_1+2z_3)\) in switch three
where \(l_1=\sigma _{1122},l_2=\sigma _{2111},l_3=\sigma _{3133}.\)
Theorem 3
Response system (16) will attain a state of multi-switching compound synchronization with drive system (13), (14), (15) for errors defined by (19), if the controllers are designed as follows:
where \(l_1=\sigma _{1213},l_2=\sigma _{2313},l_3=\sigma _{3322}.\)
Same corollaries can be obtained for Theorems 2 and 3, but not given here as these can be obtained similarly. Theorems 2 and 3 can also be proved in same manner.
4 Graphical results
Numerical simulations are shown for three switches. Parameters for Pehlivan, Liu and Qi systems are taken as \(\lambda _1=0.5, \mu _1=0.5, \lambda _2=10, \mu _2=40, \rho _2=2.5, \delta _2=4, \lambda _3=10, \mu _3=43, \rho _3=-1, \delta _3=16, \theta _3=4 \), for which respective systems are chaotic.
Parameters for Lu system are taken as \(\lambda _4=36, \mu _4=3, \rho _4=20.\) Initial conditions are chosen in the manner of ensuring the chaotic behavior of drive and response systems. Initial conditions are kept fixed for all four systems throughout the simulations. The initial conditions of the drive and the response systems are arbitrarily chosen as \((0.5,0.5,0.5),(2,2,2),(4,1,-2)\) and (20, 20, 20) respectively.

a Synchronization for \(w_3\) and \(3x_3(y_2+2z_2)\) in switch three b errors \(\sigma _{1213},\sigma _{2313},\sigma _{3322}\) converging to zero in switch three
Switch one
In first switch, \(p_1= p_2= p_3=1, q_1=q_2=q_3= 1, r_1=r_2=r_3=1, s_1=s_2=s_3=1\) are taken. Hence initial conditions for error dynamical system are (17, 17, 17). Synchronization between the state variables \(w_1, x_2(y_1+z_1)\) and \(w_2, x_3(y_3+z_1)\) are shown in Figs. 1a, b. Figure 2a, b exhibits synchronization between the state variables \(w_3, x_1(y_2+z_1)\) and errors \((\sigma _{1211},\sigma _{2331},\sigma _{3121})\) converging to zero.
Switch Two
For second switch, \(p_1=p_2=p_3=1, q_1=q_2=q_3=-1, r_1=r_2=r_3=1, s_1=s_2=s_3=1 \) are taken which lead to anti-synchronization. Hence initial conditions for error dynamical system are (21.5, 23, 20). Anti-syn-chronization between the state variables \(w_1, x_1(y_2+z_2)\) and \(w_2, x_1(y_1+z_1)\) are shown in Fig. 3 a, b. Anti-synchronization between the state variables \(w_3, x_1(y_3+z_3)\) and errors \((\sigma _{1122},\sigma _{2111},\sigma _{3133})\) converging to zero are shown in Fig. 4a, b.
Switch Three
For third switch, \(p_1=p_2=p_3=1, q_1=q_2=q_3=3, r_1=r_2=r_3=1, s_1=s_2=s_3=2\) are taken. Thus, initial conditions for error dynamical system are (23, 23, 14). Synchronization between the state variables \(w_1, 3x_2(y_1+2z_3)\) and \(w_2, 3x_3(y_1+2z_3)\) are shown in Fig. 5a, b. Synchronization between the state variables \(w_3, 3x_3(y_2+2z_2)\) and errors \((\sigma _{1213},\sigma _{2313},\sigma _{3322})\) converging to zero are shown in Fig. 6a, b.
5 Conclusion
Multi-switching compound synchronization has been achieved for three drive and one response systems by using active backstepping technique. The feasibility of a recursive method is demonstrated in this manuscript. The method is easy to implement and therefore the approach can be applied on higher dimensional systems too. The effectiveness of the approach is exhibited by numerical simulations. The rigorous analysis and computational approach provide the same results. Further possibility of improvements are still there as the same problem can be considered in case of unknown parameters or for higher dimensional systems which is a problem of further study. The method is efficient for security of communication as its complexity is the main factor which increases grade of security.
References
Shibasaki N, Uchida A, Yoshimori S, Davis P (2006) Characteristics of chaos synchronization in semiconductor lasers subject to polarization-rotated optical feedback. IEEE J Quantum Electron 42(3):342–350
Lu H, Leeuwen CV (2006) Synchronization of chaotic neural networks via output or state coupling. Chaos Solitons Fractals 30(1):166–176
Blasius B, Stone L (2000) Chaos and phase synchronization in ecological systems. Int J Bifurc Chaos 10(10):2361–2380
Li C, Liao X, Wong K (2004) Chaotic lag synchronization of coupled time-delayed systems and its applications in secure communication. Phys D 194(3–4):187–202
Moskalenko OI, Koronovskii AA, Hramov AE (2010) Generalized synchronization of chaos for secure communication: remarkable stability to noise. Phys Lett A 374(29):2925–2931
Li Z, Xu D (2004) A secure communication scheme using projective chaos synchronization. Chaos Solitons Fractals 22(2):477–481
Wu X, Li S (2012) Dynamics analysis and hybrid function projective synchronization of a new chaotic system. Nonlinear Dyn 69(4):1979–1994
Haeri M, Emadzadeh AA (2007) Synchronizing different chaotic systems using active sliding mode control. Chaos Solitons Fractals 31(1):119–129
Feng G, Cao J (2013) Master-slave synchronization of chaotic systems with modified impulsive controller. Adv Differ Equ 2013:24. https://doi.org/10.1186/1687-1847-2013-24
Al-sawalha MM, Noorani MSM (2010) Adaptive reduced-order anti-synchronization of chaotic systems with fully unknown parameters. Commun Nonlinear Sci Numer Simul 15(10):3022–3034
Pecora LM, Carroll TL (1990) Synchronization in chaotic systems. Phys Rev Lett 64(8):821–824
Runzi L, Yinglan W, Shucheng D (2011) Combination synchronization of three classic chaotic systems using active backstepping design. Chaos 21:043114. https://doi.org/10.1063/1.3655366
Lin H, Cai J, Wang J (2013) Finite-Time combination-combination synchronization for hyperchaotic systems. J Chaos 2013, Article ID 304643. https://doi.org/10.1155/2013/304643
Sun J, Wang Y, Wang Y, Cui G, Shen Y (2016) Compound-combination synchronization of five chaotic systems via nonlinear control. Optik 127(8):4136–4143
Ojo KS, Njah AN, Olusula OI (2015) Compound-combination synchronization of chaos in identical and different orders chaotic system. Arch Control Sci 25(LXI):463–490
Wu A, Zhang J (2014) Compound synchronization of fourth-order memristor oscillator. Adv Differ Equ 2014:100. https://doi.org/10.1186/1687-1847-2014-100
Zhang B, Deng F (2014) Double-Compound Synchronization of six memristor-based Lorenz Systems. Nonlinear Dyn 77(4):1519–1530
Sun J, Yin Q, Shen Y (2014) Compound synchronization for four chaotic systems of integer order and fractional order. Europhys Lett 106(4):40005
Runzi L, Yinglan W (2012) Finite time stochastic combination synchronization of three different chaotic systems and its application in secure communication. Chaos 22:023109. https://doi.org/10.1063/1.3702864
Sun J, Shen Y, Yin Q, Xu C (2013) Compound synchronization of four memristor chaotic oscillator systems and secure communication. Chaos 23:013140. https://doi.org/10.1063/1.4794794
Ucar A, Lonngren KE, Bai EW (2008) Multi-switching synchronization of chaotic systems with active controllers. Chaos Solitons Fractals 38(1):254–262
Wang X, Sun P (2011) Multi-switching synchronization of chaotic system with adaptive controllers and unknown parameters. NonLinear Dyn 63(4):599–609
Ajayi AA, Ojo SK, Vincent UE, Njah NA (2014) Multiswitching synchronization of a driven hyperchaotic circuit using active backstepping. J Nonlinear Dyn 2014, Article ID 918586. https://doi.org/10.1155/2014/918586
Vincent UE, Saseyi AO, McClintock PVE (2015) Multi-switching combination synchronization of chaotic systems. Nonlinear Dyn 80(1–2):845–854
Zheng S (2016) Multi-switching combination synchronization of three different chaotic systems via active nonlinear control. Optik 127(21):10247–10258
Ojo KS, Njah AN, Olusola OI, Omeike MO (2014) Generalized reduced-order hybrid combination synchronization of three Josephson junctions via backstepping technique. Nonlinear Dyn 77(3):583–595
Wu Z, Fu X (2013) Combination synchronization of three different order nonlinear systems using active backstepping design. Nonlinear Dyn 73(3):1863–1872
Pehlivan I, Uyarolu Y (2010) A new chaotic attractor from general Lorenz system family and its electronic experimental implementation. Turk J Electr Eng Comput Sci 18(2):171–184
Liu C, Liu T, Liu L, Liu K (2004) A new chaotic attractor. Chaos Solitons Fractals 22(5):1031–1038
Qi G, Chen G, Van Wyk MA, Van Wyk BJ, Zhang Y (2008) A four wing chaotic attractor generated from a new 3-D quadratic autonomous system. Chaos Solitons Fractals 38(3):705–721
Lu J, Chen G (2002) A new chaotic attractor coined. Int J Bifurc Chaos 12(3):659–661
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Khan, A., Budhraja, M. & Ibraheem, A. Multi-switching compound synchronization of four different chaotic systems via active backstepping method. Int. J. Dynam. Control 6, 1126–1135 (2018). https://doi.org/10.1007/s40435-017-0365-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-017-0365-z