
Abstract
This paper deals the implementation of homotopy perturbation transform method (HPTM) for numerical computation of initial valued autonomous system of time-fractional partial differential equations (TFPDEs) with proportional delay, including generalized Burgers equations with proportional delay. The HPTM is a hybrid of Laplace transform and homotopy perturbation method. To confirm the efficiency and validity of the method, the computation of three test problems of TFPDEs with proportional delay presented. The proposed solutions are obtained in series form, converges very fast. The scheme seems very reliable, effective and efficient powerful technique for solving various type of physical models arising in sciences and engineering.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional differential equation have achieved great attention among researchers due to its wide range of applications in various meaningful phenomena in fluid mechanics, electrical networks, signal processing, diffusion, reaction processes and other fields of science and engineering [4, 19, 26], among them, the non-linear oscillation of earthquake can be modeled with fractional derivatives [9], the fluid-dynamic traffic model having fractional derivatives [11] can eliminate the deficiency arising from the assumption of continuum traffic flow, fractional non linear complex model for seepage flow in porous media in [10].
Indeed, it is too tough to find an exact solution of a wide class of the differential equation. Keeping all this in mind, various type of vigorous techniques has been developed to find an approximate solution of such type of fractional differential equations, among others, generalized differential transform method [22], variational iteration method [32], local fractional variational iteration method [47], reproducing kernel Hilbert space method [7], Adomian decomposition method [27] and homotopy analysis method [31], reduced differential transform method [39, 43] and fractional reduced differential transform method [34, 36,37,38, 40, 44].
In the recent, vigourous techniques with Laplace transform has been developed, among them, see [8, 13,14,15,16,17,18, 20]. Among others, HPTM has been employed for solving fractional model of Navier–Stokes equation [21], optimal control problems [6], fractional coupled sine-Gordon equations [30], Falkner–Skan wedge flow [24], time- and space-fractional coupled Burgers’ equations [42], strongly nonlinear oscillators [28], non-homogeneous partial differential equations with a variable coefficient [23]. The reader also refer to read [33].
The partial functional differential equations with proportional delays, a special class of delay partial differential equation, arises specially in the field of biology, medicine, population ecology, control systems and climate models [46], and complex economic macrodynamics [12].
In this paper, we obtain the numerical solution of initial valued autonomous system of TFPDEs with proportional delay [33] defined by
where \(a_i, b_i \in (0, 1)\) for all \(i\in N \cup \{0\}\). \(g_k\) is initial value and f is the differential operator, the independent variables (x, t) (where t denote time, and x-space variable) generally denotes the position in space or size of cells, maturation level, at a time while its solution may be the voltage, temperature, densities of different particles, form instance, chemicals, cells, etc.. One significant example of the model: Korteweg–de Vries (KdV) equation, arise in the research of shallow water waves is as follow:
where b is a constant. The another well-known model: time-fractional nonlinear Klein–Gordon equation with proportional delay, aries in quantum field theory to describe nonlinear wave interaction
where b is a constant, h(x, t) known analytic function and F is the nonlinear operator of u(x, t). For details of various type of models, we refer the reader to [33, 46] and the references therein.
To best of my knowledge, a little literature of numerical techniques to solve TFPDE with delay, among them, Chebyshev pseudospectral method for linear differential and differential-functional parabolic equations by Zubik-Kowal [48], spectral collocation and waveform relaxation methods by Zubik-Kowal and Jackiewicz [49] and iterated pseudospectral method [25] for nonlinear delay partial differential equations, two dimensional differential transform method (2D-DTM) and RDTM for partial differential equations with proportional delay by Abazari and Ganji [2], Abazari and Kilicman [1] used DTM for nonlinear integro-differential equations with proportional delay, group analysis method for nonhomogeneous mucilaginous Burgers equation with proportional delay due to Tanthanuch [45], homotopy perturbation method for TFPDE with proportional delay by Sakar et al. [33] and Shakeri-Dehghan [35], and Biazar and Ghanbari [3], variational iteration method (VIM) for solving neutral functional-differential equation with proportional delays by Chena and Wang [5] and TFPDE with proportional delay by Singh and Kumar [41], functional constraints method for the exact solutions of nonlinear delay reaction-diffusion equations by Polyanin and Zhurov [29] and so forth.
In this paper, our main goal is to propose an alternative numerical solution of initial valued autonomous system of time fractional partial differential equation with proportional delay [33]. The paper is organized into five more sections, which follow this introduction. Specifically, Sect. 2 deals with revisit of fractional calculus. Section 3 is devoted to the procedure for the implementation of the HPTM for the problem (4). Section 4 is concerned with three test problems with the main aim to establish the convergency and effectiveness of the HPTM. Finally, Sect. 5 concludes the paper with reference to critical analysis and research perspectives.
2 Preliminaries
This section revisit some basic definitions of fractional calculus due to Liouville [26], which we need to complete the paper.
Definition 1
Let \( \mu \in \mathbb {R}\) and \(m \in \mathbb {N}\). A function \(f: \mathbb {R}^{+} \rightarrow \mathbb {R}\) belongs to \(\mathbb {C}_{\mu }\) if there exists \(k \in \mathbb {R}\), \(k > \mu \) and \(g \in C[0, \infty )\) such that \(f(x)=x^k g(x)\), \( \forall x \in \mathbb {R}^+\). Moreover, \(f\in \mathbb {C}_{\mu }^m\) if \(f^{(m)}\in \mathbb {C}_{\mu }\).
Definition 2
Let \({\mathcal {J}}_t^\alpha ~ (\alpha \ge 0)\) be Riemann–Liouville fractional integral operator and let \(f \in \mathbb {C}_{\mu }\), then
- (*):
-
\( \mathcal {{\mathcal {J}}}_t^{\alpha } f\left( t \right) {\mathrm{= }}\frac{{\mathrm{1}}}{{{\varGamma }\left( \alpha \right) }}\int \limits _{\mathrm{0}}^{\mathrm{t}} {\left( {{\mathrm{t - \tau }}} \right) ^{\alpha - 1} } f\left( \tau \right) {\mathrm{d\tau ,}} ~~ \hbox { if } \alpha >0, \)
- (**):
-
\({\mathcal {J}}_t^0 f\left( t \right) {\mathrm{= }} f(t)\), where \({\varGamma }\left( z \right) := \int \limits _0^\infty {e^{ - t} t^{z - 1} dt,z \in \mathbb {C}} \).
For \(f \in \mathbb {C}_{\mu }, \mu \ge -1, \alpha , \beta \ge 0 \) and \(\gamma >-1\), the operator \({\mathcal {J}}_t^{\alpha }\) satisfy the following properties
-
(i)
\({\mathcal {J}}_t^{\alpha } {\mathcal {J}}_t^{\beta } f(x) = {\mathcal {J}}_t^{\alpha +\beta } f(x)=J_t^{\beta } {\mathcal {J}}_t^{\alpha } f(x),\) (ii) \({\mathcal {J}}_t^{\alpha } x^{\gamma } = \frac{{\varGamma }{(1+\gamma )}}{{\varGamma }{(1+\gamma +\alpha )}}x^{\alpha +\gamma }.\)
The Caputo fractional differentiation operator \({\mathcal {D}}^\alpha _{t}\) defined as follows:
Definition 3
Let \(f \in \mathbb {C}_{\mu }\), \(\mu \ge -1\) and \(m - 1 < \alpha \le m, {\mathrm{}}m \in \mathbb {N}\). Then
Moreover, the operator \({\mathcal {D}}_t^\alpha \) satisfy following the basic properties
Lemma 1
Let \(m -1 < \alpha \le m,{\mathrm{}}m \in \mathbb {N},\) and \(f \in \mathbb {C}_\mu ^m ,{\mathrm{}}\mu \ge {\mathrm{- 1}},\) and \(\gamma > \alpha -1,\) then \(\begin{array}{ll} (\mathrm{a})\ {\mathcal {D}}_t^{\alpha }{\mathcal {D}}_t^{\beta } f(x) = {\mathcal {D}}_t^{\alpha +\beta } f(x); \quad (\mathrm{b})~~ {\mathcal {D}}_t^{\alpha } x^{\gamma } = \frac{{\varGamma }{(1+\gamma )}}{{\varGamma }{(1+\gamma -\alpha )}}x^{\gamma -\alpha },\\ (\mathrm{c})~ {\mathcal {D}}_t^\alpha {\mathcal {J}}_t^\alpha f \left( t \right) = f(t),\quad (\mathrm{d})\ {\mathcal {J}}_t^\alpha {\mathcal {D}}_t^\alpha f\left( t \right) =f\left( t \right) - \sum _{k = 0}^m {f^{\left( k \right) } \left( {0^ + } \right) \frac{{t^k }}{{k!}}},&{} \hbox { for } {\mathrm{t > 0.}} \end{array}\)
For more details on fractional derivatives, one can refer [4, 19, 26].
Definition 4
The Laplace transform of a piecewise continuous function u(t) in \((0, \infty )\) is defined by
where s is a parameter. Moreover, for the Caputo derivative \({\mathcal {D}}_t^\alpha u\left( t \right) \) and Riemann– Liouville fractional integral \( {\mathcal {J}}_t^\alpha u\left( t \right) \) of a function \(u \in \mathbb {C}_{\mu } ~~(\mu \ge -1)\), the laplace transform [19, 26] is defined as
3 Implementation: HPTM for TFPDEs with proportional delay
This section describes the implementation of HPTM to the initial valued autonomous system of TFPDEs with proportional delay, defined as below:
Taking Laplace transform on Eq. (4), we get
Inverse Laplace transform of Eq. (5) leads
where \(\psi (x)\) denotes source term, usually the recommended initial conditions.
Let us assume from homotopy perturbation method that the basic solution of Eq. (5) in a power series:
On equating like powers of p, we get
For \(p=1\), an approximate solution is given by
3.1 Convergence analysis and error estimate
This sections studies the convergence of the HPTM solution and the error estimate.
Theorem 1
Let \(0< \gamma <1\) and let \(u_n(x, t), u(x, t)\) are in Banach space \(({\mathcal {C}}[0, 1], \Vert \cdot \Vert )\). Then the series solution \(\sum _{n=0}^{\infty } u_n(x, t)\) from the sequence \(\{u_n(x)\}_{n=0}^\infty \) converges to the solution of Eq. (4) whenever \(u_n(x)\le \gamma u_{n-1)}(x)\) for all \(n\in N\).
Moreover, the maximum absolute truncation error of the series solution (10) for Eq. (4) is computed as
Proof
The proof is similar to [33, Theorem 4.1, 4.2].
4 Application of HPTM for TFPDEs with proportional delay
In this section, the effectiveness and validity of HPTM is illustrated by three test problems of initial valued autonomous system of TFPDEs with proportional delay.
Example 1
Consider initial values system of time-fractional order, generalized Burgers equation with proportional delay as given in [33]
Taking Laplace transformation of Eq. (12), we get
Now, inverse Laplace transform with basic solution (7) leads to
On comparing the coefficient of like powers of p, we get

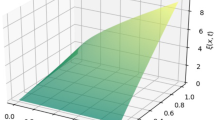
The surface HPTM solution behavior of u of Example 1 for a \(\alpha =0.8\); b \(\alpha =0.9\); c \(\alpha =1.0\)

Plots of HPTM solution u(x, t) of Example 1 for \(\alpha =0.8, 0.9, 1.0\), \(t\in (0,1); x=1\)
Therefore the solution for Eq. (12) is
The same solution is obtained by Sarkar et al. [33]. In particular, for \(\alpha =1\), the seventh order solution is
which is same as obtained by DTM and RDTM [2], and is a closed form of the exact solution \(u(x, t) = x\exp (t)\). The HPTM solution for \(\alpha =1\) is reported in Table 1. The surface solution behavior of u(x, t) for different values of \(\alpha =0.8, 0.9, 1.0\) is depicted in Fig. 1, and the plots of the solution for \(x=1\) at different time intervals \(t\le 1\) is depicted in Fig. 2. It is found that the results are agreed well with HPM as well as DTM solutions and approaching to the exact solution.
Example 2
Consider initial value TFPDE with proportional delay as given in [2, 33]
Taking Laplace transform of Eq. (19), we get
The inverse Laplace transform of Eq. (20) leads to
Eq. (21) with basic solution (7) leads to
On comparing the coefficient of like powers of p, we get
Thus, the solution for Eq. (19) is given by
which is the required exact solution, same solution is obtained by Sarkar et al. [33]. In particular for \(\alpha =1\), the seventh order solution is obtained as
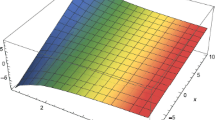
which is same as obtained by DTM and RDTM [2], and is a closed form of the exact solution \(u(x, t) = x^2 \exp (t)\). The HPTM solution for \(\alpha =1\) is reported in Table 2. The surface solution behavior of u(x, t) for different values of \(\alpha =0.8, 0.9, 1.0\) is depicted in Fig. 3, and the plots of the solution for \(x=1\) at different time intervals \(t\le 1\) is depicted in Fig 4. It is found that the proposed HPTM results are agreed well with HPM as well as DTM solutions and approaching to the exact solution.

The surface solution behavior of u of Example 2 for a \(\alpha =0.8\); b \(\alpha =0.9\); c \(\alpha =1.0\)

Plots of HPTM solution u(x, t) of Example 2 for \(\alpha =0.8, 0.9, 1.0\); \(t \in (0,1);x=1\)
Example 3
Consider initial value TFPDE with proportional delay as given in [2, 33]
Taking Laplace transform of Eq. (26), we get
The inverse Laplace transform leads to
Homotopy perturbation transform method on Eq. (28) leads to
On comparing the coefficient of like powers of p, we get
The required solution of Eq. (26) is
which is a closed form to the exact solution and the solution obtained by Sarkar et al. [33]. In particular, for \(\alpha =1\), the seventh order solution is obtained as
which is same as obtained by DTM and RDTM [2], and is a closed form of the exact solution \(u(x, t) = x^2 \exp (-t)\). The HPTM solution for \(\alpha =1.0\) is reported in Table 3. The solution behavior of u for different values of \(\alpha =0.8, 0.9, 1.0\) is depicted in Fig. 5, while the plots for \(x=1\) at different time levels \(t\le 1\) is depicted in Fig. 6. This evident that HPTM solutions are agreed well with HPM as well as DTM solutions, and approaching to the exact solution.

The solution behavior of HPTM solution u of Example 3 for a \(\alpha =0.8, 0.9, 1.0\); b \(\alpha =0.9\); c \(\alpha =1.0\)

Plots of HPTM solution u(x, t) of Example 3 for \(\alpha =0.8, 0.9, 1.0\); \(t \in (0,1);x=1\)
5 Conclusion
In this paper, homotopy perturbation transform method is successfully employed for numerical computation of initial valued autonomous system of time-fractional model of TFPDE with proportional delay, where we use the fractional derivative in Caputo sense. Three test problems are carried out in order to validate and illustrate the efficiency of the method. The proposed solutions agreed excellently with HPM [33], VIM [41] and DTM [2]. The proposed approximate series solutions are obtained without any discretization, perturbation, or restrictive conditions, which converges very fast. However, the performed calculations show that the described method needs a small size of computation in comparison to HPM [33] and DTM [2]. Small size of computation of this scheme is the strength of the scheme.
References
Abazari, R., Ganji, M.: Extended two-dimensional DTM and its application on nonlinear PDEs with proportional delay. Int. J. Comput. Math. 88(8), 1749–1762 (2011)
Abazari, R., Kilicman, A.: Application of differential transform method on nonlinear integro-differential equations with proportional delay. Neural Comput. Appl. 24, 391–397 (2014)
Biazar, J., Ghanbari, B.: The homotopy perturbation method for solving neutral functional-differential equations with proportional delays. J. King Saud Univ. Sci. 24, 33–37 (2012)
Caputo, M., Mainardi, F.: Linear models of dissipation in anelastic solids. Rivista del Nuovo Cimento 1, 161–98 (1971)
Chen, X., Wang, L.: The variational iteration method for solving a neutral functional-differential equation with proportional delays. Comput. Math. Appl. 59, 2696–2702 (2010)
Ganjefar, S., Rezaei, S.: Modified homotopy perturbation method for optimal control problems using the Padè approximant. Appl. Math. Model. (2016). doi:10.1016/j.apm.2016.02.039
Geng, F., Cui, M.: A reproducing kernel method for solving nonlocal fractional boundary value problems. Appl. Math. Lett. 25(5), 818–823 (2012)
Gondal, M.A., Khan, M., Omrani, K.: A new analytical approach to two dimensional magneto-hydrodynamics flow over a nonlinear porous stretching sheet by Laplace Padè decomposition method. Results Math. 63, 289–301 (2013)
He, J.H.: Nonlinear oscillation with fractional derivative and its applications. In: International Conference on Vibrating Engg’98, Dalian, pp. 288–291 (1998)
He, J.H.: Approximate analytical solution for seepage flow with fractional derivatives in porous media. Comput. Methods Appl. Mech. Eng. 167, 57–68 (1998)
He, J.H.: Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 178, 257–62 (1999)
Keller, A.A.: Contribution of the delay differential equations to the complex economic macrodynamics. WSEAS Trans. Syst. 9(4), 258–271 (2010)
Khader, M.M., Kumar, S., Abbasbandy, S.: New homotopy analysis transform method for solving the discontinued problems arising in nanotechnology. Chin. Phys. B 22(11), 110201 (2013)
Khan, M., Gondal, M.A.: A reliable treatment of Abel’s second kind singular integral equations. Appl. Math. Lett. 25(11), 1666–1670 (2012)
Khan, M., Hussain, M.: Application of Laplace decomposition method on semi-infinite domain. Numer. Algorithms 56, 211–218 (2011)
Khan, M., Gondal, M.A., Hussain, I., Vanani, S.K.: A new comparative study between homotopy analysis transform method and homotopy perturbation transform method on semi-infinite domain. Math. Comput. Model. 55, 1143–1150 (2012)
Khan, M., Gondal, M.A., Kumar, S.: A new analytical solution procedure for nonlinear integral equations. Math. Comput. Model. 55, 1892–1897 (2012)
Khan, M., Gondal, M.A., Batool, S.I.: A new modified Laplace decomposition method for higher order boundary value problems. Comput. Math. Organ. Theory 19(4), 446–459 (2013)
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, Amsterdam (2006)
Kumar, S., Kumar, D., Abbasbandy, S., Rashidi, M.M.: Analytical solution of fractional Navier–Stokes equation by using modified laplace decomposition method. Ain Shams Eng. J. 5(2), 569–574 (2014)
Kumar, D., Singh, J., Kumar, S.: A fractional model of Navier–Stokes equation arising in unsteady flow of a viscous fluid. J. Assoc. Arab Univ. Basic. Appl. Sci. 17, 14–19 (2015)
Liu, J., Hou, G.: Numerical solutions of the space-and time-fractional coupled burgers equations by generalized differential transform method. Appl. Math. Comput. 217(16), 7001–7008 (2011)
Madani, M., Fathizadeh, M., Khan, Y., Yildirim, A.: On the coupling of the homotopy perturbation method and Laplace transformation. Math. Comput. Model. 53, 1937–1945 (2011)
Madaki, G., Abdulhameed, M., Ali, M., Roslan, R.: Solution of the Falkner–Skan wedge flow by a revised optimal homotopy asymptotic method, Madaki et al. SpringerPlus 5, 513 (2016)
Mead, J., Zubik-Kowal, B.: An iterated pseudospectral method for delay partial differential equations. Appl. Numer. Math. 55, 227–250 (2005)
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Momani, S., Odibat, Z.: Analytical solution of a time-fractional Navier–Stokes equation by adomaian decomposition method. Appl. Math. Comput. 177, 488–494 (2006)
Momani, S., Erjaee, G.H., Alnasr, M.H.: The modified homotopy perturbation method for solving strongly nonlinear oscillators. Comput. Math. Appl. 58, 2209–2220 (2009)
Polyanin, A.D., Zhurov, A.I.: Functional constraints method for constructing exact solutions to delay reaction–diffusion equations and more complex nonlinear equations. Commun. Nonlinear Sci. Numer. Simul. 19(3), 417–430 (2014)
Ray, S.S., Sahoo, S.: A comparative study on the analytic solutions of fractional coupled sine-Gordon equations by using two reliable methods. Appl. Math. Comput. 253, 72–82 (2015)
Sakar, M.G., Erdogan, F.: The homotopy analysis method for solving the time-fractional Fornberg–Whitham equation and comparison with Adomian’s decomposition method. Appl. Math. Model. 37(20–21), 1634–1641 (2013)
Sakar, M.G., Ergören, H.: Alternative variational iteration method for solving the time-fractional Fornberg–Whitham equation. Appl. Math. Model. 39(14), 3972–3979 (2015)
Sakar, M.G., Uludag, F., Erdogan, F.: Numerical solution of time-fractional nonlinear PDEs with proportional delays by homotopy perturbation method. Appl. Math. Model. (2016). doi:10.1016/j.apm.2016.02.005
Saravanan, A., Magesh, N.: An efficient computational technique for solving the Fokker–Planck equation with space and time fractional derivatives. J. King Saud Univ. Sci. 28, 160–166 (2016)
Shakeri, F., Dehghan, M.: Solution of delay differential equations via a homotopy perturbation method. Math. Comput. Model. 48, 486–498 (2008)
Singh, B.K.: Fractional reduced differential transform method for numerical computation of a system of linear and nonlinear fractional partial differential equations. Int. J. Open Probl. Comput. Sci. Math. 9(3), 20–38 (2016)
Singh, B.K., Kumar, P.: FRDTM for numerical simulation of multi-dimensional, time-fractional model of Navier–Stokes equation. Ain Shams Eng. J. (2016). doi:10.1016/j.asej.2016.04.009
Singh, B.K., Kumar, P.: Numerical computation for time-fractional gas dynamics equations by fractional reduced differential transforms method. J. Math. Syst. Sci. 6(6), 248259 (2016)
Singh, B.K., Mahendra: A numerical computation of a system of linear and nonlinear time dependent partial differential equations using reduced differential transform method. Int. J. Differ. Equ. 2016, Article ID 4275389, 8 pp. (2016)
Singh, B.K., Srivastava, V.K.: Approximate series solution of multi-dimensional, time fractional-order (heat-like) diffusion equations using FRDTM. R. Soc. Open Sci. 2, 140511. doi:10.1098/rsos.140511
Singh, B.K., Kumar, P.: Fractional variational iteration method for solving fractional partial differential equations with proportional delay. Int. J. Differ. Equ. (2017). https://www.hindawi.com/journals/ijde/aip/5206380/
Singh, J., Kumar, D., Swroop, R.: Numerical solution of time- and space-fractional coupled Burgers’ equations via homotopy algorithm. Alex. Eng. J. (2016). doi:10.1016/j.aej.2016.03.028
Srivastava, V.K., Mishra, N., Kumar, S., Singh, B.K., Awasthi, M.K.: Reduced differential transform method for solving \((1+n)\)-dimensional Burgers’ equation. Egypt. J. Basic Appl. Sci. 1, 115–119 (2014)
Srivastava, V.K., Kumar, S., Awasthi, M.K., Singh, B.K.: Two-dimensional time fractional-order biological population model and its analytical solution. Egypt. J. Basic Appl. Sci. 1, 71–76 (2014)
Tanthanuch, J.: Symmetry analysis of the nonhomogeneous inviscid burgers equation with delay. Commun. Nonlinear Sci. Numer. Simul. 17(12), 4978–4987 (2012)
Wu, J.: Theory and Applications of Partial Functional Differential Equations. Springer, New York (1996)
Yang, X.J., Baleanu, D., Khan, Y., Mohyud-din, S.T.: Local fractional variational iteration method for diffusion and wave equations on cantor sets. Rom. J. Phys. 59(1–2), 36–48 (2014)
Zubik-Kowal, B.: Chebyshev pseudospectral method and waveform relaxation for differential and differential-functional parabolic equations. Appl. Numer. Math. 34(2–3), 309–328 (2000)
Zubik-Kowal, B., Jackiewicz, Z.: Spectral collocation and waveform relaxation methods for nonlinear delay partial differential equations. Appl. Numer. Math. 56(3–4), 433–443 (2006)
Acknowledgements
The authors are grateful to the anonymous referees for their time, effort, and extensive comment(s) which improve the quality of the paper. Pramod Kumar is thankful to Babasaheb Bhimrao Ambedkar University, Lucknow, India for financial assistance to carry out the work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Singh, B.K., Kumar, P. Homotopy perturbation transform method for solving fractional partial differential equations with proportional delay. SeMA 75, 111–125 (2018). https://doi.org/10.1007/s40324-017-0117-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40324-017-0117-1
Keywords
- Homotopy perturbation transform method
- Fractional derivative, in Caputo sense
- Autonomous differential equations
- Fractional partial deferential equation with proportional delay
- Generalized Burgers equations with proportional delay