
Abstract
This paper presents the solution of important types of non-linear time-fractional partial differential equations via the conformable Elzaki transform Homotopy perturbation method. We apply the proposed technique to solve four types of non-linear time-fractional partial differential equations. In addition, we establish the results on the uniqueness and convergence of the solution. Finally, the numerical results for a variety of α values are briefly examined. The proposed method performs well in terms of simplicity and efficiency.
Similar content being viewed by others

1 Introduction
Recently, numerous and improved applications of fractional calculus have given rise to this issue (see [1–11] and references therein). In 2014, Khalil et al. introduced a new definition of local type for the fractional derivative using “conformable derivative” \((\mathbb{C}_{\mathcal{D}})\) [3]. The fact that this derivative satisfies a huge portion of the well-known characteristics of integer order derivatives is described as a main reason for its adoption [10]. Later, Abdeljawad [8] used this newly defined terminology to describe the fundamental features and results of fractional calculus.
In [12, 13], the authors discussed the physical and geometric interpretation of the conformable derivatives, respectively. In [14], the authors proposed Euler’s and modified Euler’s method utilizing \(\mathbb{C}_{\mathcal{D}}\). Moreover, they have discussed the validity of the proposed method briefly. Since with the rapid development of non-linear science over the last two decades, scientists and engineers have become increasingly interested in analytical tools for non-linear problems.
Perturbation methods \((\mathrm{P}\mathbb{M})\) are frequently used techniques. However, perturbation methods, like other nonlinear analytical techniques, have their own set of restrictions. Almost all perturbation methods start with the assumption that the equation must have a small parameter. The applicability of perturbation techniques is severely limited by this so-called small parameter assumption [15]. The Homotopy Perturbation Method \((\mathrm{HP}\mathbb{M})\) was first proposed by Ji Huan He [15, 16]. The \(\mathrm{HP}\mathbb{M}\) has been used by many researchers in recent years to solve different types of linear and non-linear differential equations, see, for example, [17–19] and references therein. In [20], the author applied the \(\mathrm{HP}\mathbb{M}\) along with Elzaki transformation \((\mathrm{E}\mathbb{T})\) to provide the solution of some non-linear partial differential equation \((\mathbb{N}\mathbbm{-}\mathbb{PDE}s)\). Furthermore, they discussed that the developed algorithm can solve \(\mathbb{N}\mathbbm{-}\mathbb{PDE}s\) without “Adomian’s polynomials”, which is considered a clear advantage of this technique over the decomposition method. In 2022, Anaç presented the applications of the Homotopy perturbation Elzaki transform method to obtain the numerical solutions of Gas-dynamics and Klein-Gordon equations and showed that numerical solutions of fractional partial differential equations obtain both quickly and efficiently via a current method [21]. They studied random non-linear partial differential equations to acquire the approximate solutions of these equations by the Homotopy perturbation Elzaki Transform method [22].
The Homotopy Perturbation Method using \(\mathrm{E}\mathbb{T}\) is presented by Elzaki et al. in [20]. In this research paper, we successfully apply this technique to solve non-linear homogeneous and non-homogeneous \(\mathbb{PDE}s\). The efficiency of \(\mathrm{E}\mathbb{T}-\mathrm{HP}\mathbb{M}\) to solve this type of problem is also shown in [23, 24]. We are now going to formulate a Con-version of \(\mathrm{HP}\mathbb{M}\) using \(\mathrm{E}\mathbb{T}\) \((\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M})\) to solve non-linear time-fractional partial differential equations \((\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s)\). Thus, given a \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\) as follows
subject to the initial condition \((\mathbb{I}\mathbbm{.}\mathbb{C}\mathbbm{.})\)
where y is a function of two variables, \(L_{\mathbb{C}}^{ \upalpha} = \frac{\partial ^{\upalpha}}{ \partial \nu ^{\upalpha}}\) is a linear operator with \(\mathbb{C}_{\mathcal{D}}\) of order \(0 < \upalpha \leq 1\), \(\mathcal{N}_{1} \) and \(\mathcal{N}_{2}\) are a non-linear operator and the second part of linear operator, respectively, and \(\mathcal{H}(u,\nu )\) is a non-homogeneous term.
The article is outlined as follows: Sect. 2 introduces some key concepts in the conformable calculus. Section 3 outlines the essential features of the \(\mathrm{E}\mathbb{T}\) by proposing a new definition based on \(\mathbb{C}_{\mathcal{D}}\) and integrals. Following that, Sect. 4 is built using conformable-Elzaki transform \((\mathbb{C}_{\mathcal{D}} \mathrm{E}\mathbb{T})\). This section also includes results on the uniqueness and convergence of the solution found using the suggested approach. We applied the approach to several types of \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\) and discussed their numerical solutions in Sect. 5. Finally, Sect. 6 addresses the conclusion of the work.
2 Fundamental properties of conformable calculus
In this section, we will highlight some of the basic properties of \(\mathbb{C}_{\mathcal{D}}\) and \(\mathrm{E}\mathbb{T}\).
Definition 2.1
Given \(\mathrm{y}: [0,\infty )\to \mathbb{R}\) as a function. Then, the αth order \(\mathbb{C}_{\mathcal{D}}\) is expressed as [3],
If y is α-differentiable (α-Diff) in some \((0,\tau _{\circ}), \tau _{\circ }>0 \), and \(( \mathbb{C}_{\mathcal{D}}^{\upalpha } \mathrm{y} )( \nu )\) exists, then it is expressed as
Remark 2.1
From definition 2.1, the basic properties of the \(\mathbb{C}_{\mathcal{D}}\) can be easily established (see [3]). In addition, by the direct application of the same definition, the values of the main elementary functions using \(\mathbb{C}_{\mathcal{D}}\) can be easily obtained (see [3]). We will only highlight the following result that relates the \(\mathbb{C}_{\mathcal{D}}\) with the ordinary derivatives
Let y is α-Diff at a point \(\nu > 0\). If y is Diff then
Remark 2.2
Another important result of the mathematical analysis of functions of a real variable, the chain rule, has also been formulated in a conformable sense in [8].
The Con-laplace transform of order α is expressed as [8, 25]
The function y is considered as conformable exponentially bounded if there are constants \(\breve{M}>0\), \(\gamma \in \mathbb{R}\) and \(\tau _{\circ}>0\), such that
Finally, for a real valued function of several variable, the conformable partial derivative can be stated as follows. Consider the real-valued function of n variables with \(\textbf{b} = (b_{1},\dots , b_{n} )\in \mathbb{R}^{n}\) being a point whose ith component is positive. Then, the limit can be defined as follows
If the above limit exists, then we have the \(\upalpha \in (0,1]\) order ith con-partial derivative of y at b, denoted by \(\frac{ \partial ^{\upalpha}}{ \partial b_{i}^{\upalpha }} \mathrm{y}( \textbf{b})\). The α-conformable integral of a function y beginning from \(\tau _{\circ}\ge 0\) is defined as [1],
whereas, this is a usual Riemann improper integral for \(\upalpha \in (0,1]\). As a result, we have
where y is any continuous function. Also,
whenever the real-valued function y is α-Diff with \(0 < \upalpha \leq 1\) [26].
3 The conformable Elzaki transform
Elzaki introduces a new integral transform, namely the Elzaki transform, and its main properties are established in [27]. Subsequent research works show the applicability of this transform to solve important problems related to ordinary and partial differential equations [28]. Next, we will define the \(\mathrm{E}\mathbb{T}\) in Con-sense and derive its properties.
Definition 3.1
Suppose that \(\upalpha \in (0,1]\) and \(\mathrm{y}:[0,\infty )\to \mathbb{R}\) are real-valued functions. Then, the \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) of order α is expressed as
Theorem 3.2
If y is a piece-wise continuous function on \([0,\infty )\) and Con-exponentially bounded, then \(E_{\upalpha }[\mathrm{y}(\nu )](\mathrm{s})\) exists for \(\frac{1}{\mathrm{s}} > \gamma \), \(\mathrm{s}\neq 0\).
Proof
Since y is Con-exponentially bounded, there exist constants \(\breve{M}_{1}>0\), \(\gamma \in \mathbb{R}\) and \(\tau _{\circ}>0\) such that
Furthermore, y is piece-wise continuous on \([0,\tau _{\circ}]\) and hence bounded there, say
This mean that, a constant M̆ can be chosen sufficiently large so that the inequality (10) holds. Therefore,
Letting \(\tau \to \infty \), we see that
□
Theorem 3.3
Let \(\upalpha \in (0,1]\), \(\mathrm{y}, \acute{\mathrm{y}} : [0,\infty )\to \mathbb{R}\) be real-valued functions, and \(\lambda _{i} \in \mathbb{R}\), \(i = 1,2\). If \(E_{\upalpha}[\mathrm{y}(\nu )](\mathrm{s}) \) and \(E_{\upalpha}[\acute{\mathrm{y}}(\nu )](\mathrm{s})\) exists, then
Proof
This result follows directly from the linearity of the integral. □
Theorem 3.4
Let \(\upalpha \in (0,1]\). So, we have
-
1)
\(E_{\upalpha }[c](\mathrm{s}) =c \mathrm{s}^{2}\), for any \(c \in \mathbb{R}\) and \(\mathrm{s}>0\);
-
2)
\(E_{\upalpha }[\nu ^{b} ](\mathrm{s}) = \upalpha ^{\frac{b}{\upalpha}} \Gamma ( 1 + \frac{b}{ \upalpha}) \mathrm{s}^{ ( 2+ \frac{b}{ \upalpha} )}\), \(b>-1\) and \(\mathrm{s}>0\);
-
3)
\(E_{\upalpha }[e^{c\frac{\nu ^{\upalpha}}{\upalpha} }]( \mathrm{s}) = \frac{\mathrm{s}^{2}}{ 1 - c\mathrm{s}}\), c is any real number and \(\mathrm{s}> \frac{1}{c}\);
-
4)
\(E_{\upalpha } [ \sin c \frac{\nu ^{\upalpha }}{ \upalpha} ] (\mathrm{s}) = \frac{c \mathrm{s}^{3}}{1 + c^{2} \mathrm{s}^{2} }\), c is any real number and \(\mathrm{s}>0\);
-
5)
\(E_{\upalpha } [ \cos c \frac{ \nu ^{\upalpha}}{ \upalpha} ] (\mathrm{s}) = \frac{\mathrm{s}^{2}}{1+c^{2} \mathrm{s}^{2} }\), c is any real number and \(\mathrm{s}>0\);
-
6)
\(E_{\upalpha } [ \sinh c \frac{\nu ^{\upalpha}}{ \upalpha} ] ( \mathrm{s}) = \frac{c \mathrm{s}^{3}}{1 - c^{2} \mathrm{s}^{2} }\), c is any real number and \(0<\mathrm{s} < \frac{1}{| \mathrm{s}| }\);
-
7)
\(E_{\upalpha } [ \cosh c \frac{\nu ^{\upalpha}}{\upalpha} ]( \mathrm{s}) = \frac{\mathrm{s}^{2}}{ 1 - c^{2} \mathrm{s}^{2} }\), c is any real number and \(0<\mathrm{s} <\frac{1}{| c| }\).
Proof
-
1)
Follows from the definition directly.
-
2)
Through a change of variables, we have
$$ \mathrm{s} \int _{0}^{\infty} e^{ \frac{-\nu ^{\upalpha}}{ \upalpha \mathrm{s}}} \nu ^{b}\, \frac{{\mathrm {d}} \nu}{\nu ^{1 - \upalpha}} = \upalpha ^{ \frac{b}{\upalpha}} \mathrm{s}^{ ( 2 + \frac{b}{\upalpha} )} \int _{0}^{\infty} \xi ^{\frac{b}{\upalpha}} e^{-\xi} \,{ \mathrm {d}} \xi = \upalpha ^{\frac{b}{ \upalpha}} \Gamma \biggl( 1 + \frac{b}{\upalpha} \biggr) \mathrm{s}^{ ( 2+\frac{b}{\upalpha} )}.$$ -
3)
Since,
$$ \mathrm{s} \int _{o}^{\infty} e^{ \frac{-\nu ^{\upalpha}}{\upalpha \mathrm{s}}} e^{ c \frac{ \nu ^{\upalpha}}{\upalpha}} \,\frac{ {\mathrm {d}} \nu}{\nu ^{1 - \upalpha}} = \mathrm{s} \int _{0}^{ \infty} e^{\frac{ - \nu ^{\upalpha}}{ \upalpha} ( \frac{1}{ \mathrm{s}}-c ) } \,\frac{ {\mathrm {d}}\nu}{\nu ^{1 - \upalpha}} = \frac{ \mathrm{s}^{2}}{1 - c\mathrm{s}}.$$ -
4)
Using the fact that
$$ \int _{0}^{\infty} e^{-\nu ^{\frac{ \upalpha}{\upalpha \mathrm{s}}}} \sin \bigl(c \nu ^{\frac{ \upalpha}{\upalpha}} \bigr)\, \frac{ {\mathrm {d}} \nu}{\nu ^{1 - \upalpha}} = - \frac{c\mathrm{s}^{2}}{ 1+ c^{2} \mathrm{s}^{2} } e^{-\nu ^{ \frac{ \upalpha}{ \upalpha \mathrm{s}}}} \biggl( \cos \biggl( c \frac{\nu ^{\upalpha}}{ \upalpha} \biggr) + \frac{1}{c \mathrm{s}} \sin \biggl( c { \frac{\nu ^{\upalpha}}{ \upalpha }} \biggr) \biggr),$$we can get the required result.
-
5)
Similarly, we have
$$ \int _{0}^{ \infty} e^{-\nu ^{\frac{\upalpha}{ \upalpha \mathrm{s}}}} \cos \bigl( c \nu ^{\frac{ \upalpha}{ \upalpha}} \bigr)\, \frac{{\mathrm {d}} \nu }{ \nu ^{ 1 - \upalpha}} = - \frac{ c \mathrm{s}^{3}}{1 + c^{2} \mathrm{s}^{2}} e^{ - \nu ^{ \frac{ \upalpha}{ \upalpha \mathrm{s}}}} \biggl( \sin \biggl( c \frac { \nu ^{\upalpha}}{\upalpha} \biggr) - \frac{1}{c\nu} \cos \biggl( c { \frac{\nu ^{\upalpha}}{\upalpha }} \biggr) \biggr).$$ -
6)
As
$$ E_{\upalpha } \biggl[ \sinh \biggl( c \frac{\nu ^{\upalpha}}{\upalpha} \biggr) \biggr]( \mathrm{s}) = \frac{1}{2} \bigl( E_{\upalpha } \bigl[ e^{c \frac{\nu ^{\upalpha}}{ \upalpha}} \bigr](\mathrm{s}) - E_{ \upalpha } \bigl[e^{-c \frac{\nu ^{\upalpha}}{ \upalpha}} \bigr]( \mathrm{s}) \bigr),$$it is easy to get the required result.
-
7)
Similarly, as
$$ E_{\upalpha } \biggl[ \cosh \biggl( c \frac{\nu ^{\upalpha}}{ \upalpha} \biggr) \biggr]( \mathrm{s}) = \frac{1}{2} \bigl( E_{\upalpha } \bigl[ e^{c \frac{\nu ^{\upalpha}}{\upalpha}} \bigr]( \mathrm{s}) + E_{ \upalpha } \bigl[ e^{- \frac{\nu ^{\upalpha}}{\upalpha}} \bigr]( \mathrm{s}) \bigr),$$it is easy to get the required result.
□
Theorem 3.5
Suppose that \(\mathrm{y}(\nu )\) is continuous, and \(( \mathbb{C}_{\mathcal{D}}^{\upalpha } \mathrm{y} )( \nu )\) is piece-wise continuous for all \(\nu \geq 0\). Suppose further that \(\mathrm{y}(\nu )\) is Con-exponentially bounded. Then
exists and, moreover,
Proof
Using definition 3.1, we have
Now, using integration by parts [8], we get
Since \(\mathrm{y}(\nu )\) is Con-exponentially bounded, \(\lim_{\tau \to \infty} e^{- \frac{\tau ^{\upalpha}}{\upalpha \mathrm{s}}} \mathrm{y}(\tau )=0\), whenever \(\frac{1}{ \mathrm{s}} > \gamma \). Hence,
for \(\frac{1}{\mathrm{s}} > \gamma \). □
Indeed, provided that the function y and its \(\mathbb{C}_{\mathcal{D}}\) satisfy the appropriate conditions, an expression for the \(\mathbb{C}_{\mathcal{D}}\mathrm{ET}\) of the derivative \((n) \mathbb{C}_{\mathcal{D}}^{ \upalpha}\) can be derived by successive applications of the previous theorem. This result is given in the following corollary.
Corollary 3.1
Suppose that \(\mathrm{y}, \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y}, \dots , (n-1)\mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y}\) are continuous, and \((n) \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y}\) is piecewise continuous for all \(\nu \geq 0\). Suppose further that \(\mathrm{y}, \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y}, \dots , (n-1) \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y}\) are con-exponentially bounded. Then \(E_{\upalpha } [ (n) ( \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y} )(\nu ) ](\mathrm{s})\) exists for \(\frac{1}{\mathrm{s}}> \gamma \) and is given by
Remark 3.1
Here, \((n) ( \mathbb{C}_{\mathcal{D}}^{ \upalpha} \mathrm{y} )(\nu )\) means the application of the \(\mathbb{C}_{\mathcal{D}}\), n times.
Remark 3.2
If we assume that \(\mathrm{y}(x,\nu )\) is piece-wise continuous and Con-exponentially bounded, the following results are easily obtained
-
1
Using Leibniz’s rule, we can find
$$\begin{aligned} E_{\upalpha } \biggl[ \frac{\partial \mathrm{y}(x,\nu )}{ \partial x} \biggr]( \mathrm{s}) & = \mathrm{s} \int _{0}^{\infty} e^{- \frac{\nu ^{\upalpha}}{\upalpha \mathrm{s}}} \frac{\partial \mathrm{y}(x,\nu ) }{\partial x} \,\frac {{\mathrm {d}}\nu}{\nu ^{1-\upalpha}} \\ & = \frac{\partial}{\partial x} \biggl[ \int _{0}^{\infty} \mathrm{s} e^{-\frac{t^{\upalpha}}{\upalpha \mathrm{s}}} \mathrm{y}(x,\nu ) \,\frac {{\mathrm {d}} \nu}{\nu ^{1-\upalpha}} \biggr] = \frac{\partial}{\partial x} \bigl[ \mathbb{C}_{\mathcal{D}}^{ \upalpha}(x,\mathrm{s}) \bigr]. \end{aligned}$$Also,
$$ E_{\upalpha } \biggl[ \frac{\partial ^{2} \mathrm{y}(x,\nu )}{ \partial x^{2}} \biggr]( \mathrm{s}) = \frac{\partial ^{2}}{\partial x^{2}} \bigl[ \mathbb{C}_{ \mathcal{D}}^{ \upalpha}(x, \mathrm{s}) \bigr].$$ -
2
From Theorem 2.4, we have
$$ E_{\upalpha } \biggl[ \frac{\partial ^{\upalpha }\mathrm{y}(x,\nu )}{ \partial \nu ^{\upalpha }} \biggr](\mathrm{s}) = \frac{1}{\mathrm{s}} E_{\upalpha } \bigl[ \mathrm{y}(x,\nu ) \bigr]( \mathrm{s})-\mathrm{s} \mathrm{y} (x,0).$$
Another important property of the \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) is the convolution theorem, which is stated below.
Theorem 3.6
Consider two real-valued functions, i.e., \(\mathrm{y}, \acute{\mathrm{y}}:[0,\infty )\to \mathbb{R}\), if the convolution of y and ý of order \(0 < \upalpha \leq 1\), expressed as
Then, one can obtain the \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) as
Proof
Applying \(\mathbb{C}_{\mathcal{D}}\mathrm{ET}\) on Eq. (8), we have
Let \(( \frac{ \nu ^{\upalpha}}{ \upalpha} - \frac{\xi ^{\upalpha}}{ \upalpha} ) = \frac{\mathrm{u}^{\upalpha}}{\upalpha}\), then we get
which can be written as
□
Finally, we can define the inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) as follows.
Definition 3.7
For a piece-wise continuous on \([0,\infty )\) and Con-exponentially bounded \(\mathrm{y}(\nu )\) whose \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) is \(\mathrm{Y}(\mathrm{s})\), we call \(\mathrm{y}(\nu )\) the inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) of \(\mathrm{Y}(\mathrm{s})\) and write \(\mathrm{y}(\nu ) = E_{\upalpha}^{-1} [\mathrm{Y}(\mathrm{s})]\). Symbolically
The inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{ET}\) possesses a linear property as indicated in the following result.
Theorem 3.8
Given two ET, \(\mathrm{Y}(\mathrm{s})\) and \(\acute{\mathrm{Y}}(\mathrm{s})\) then,
for any constants \(\lambda _{1}, \lambda _{2} \in \mathbb{R}\).
Proof
Suppose that \(E_{\upalpha }[\mathrm{y}(\nu )] = \mathrm{Y}(\mathrm{s})\) and \(E_{\upalpha }[\acute{\mathrm{y}}(\nu )]=\acute{\mathrm{Y}}( \mathrm{s})\). Since
we have \(E_{\upalpha}^{-1} [\lambda _{1} \mathrm{Y}(\mathrm{s}) + \lambda _{2} \acute{\mathrm{Y}}(\mathrm{s}) ] = \lambda _{1} E_{ \upalpha}^{-1} [\mathrm{Y}(\mathrm{s})] + \lambda _{2} E_{\upalpha}^{-1} [\acute{\mathrm{Y}}(\mathrm{s})]\). □
Remark 3.3
It is easy to show that the relationship between \(\mathbb{C}_{\mathcal{D}}L\mathbb{T}\) and \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) is
4 Conformable Elzaki transform \(\mathrm{HP}\mathbb{M}\)
By solving for \(L_{\mathbb{C}}^{ \upalpha} \mathrm{y}(u,\nu )\), Eq. (1) can be written as
By implementing the \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) on both sides of the above equation, we get
Using Remark 2.1, we get
After substituting the initial condition, the Eq. (1) can be re-written as
Finally, by applying inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we get
where \(\mathrm{Y}(u,\nu )\) represents the term that has emerged from the source term and \(\mathbb{I}\mathbbm{.}\mathbb{C}\). The \(\mathrm{HP}\mathbb{M}\) suggests the solution \((u,\nu )\) to be decomposed into the infinite series of components [29, 30],
and non-linear term \(\mathcal{N}_{1} ( \mathrm{y}(u,\nu ) )\) is decomposed into
for some He’s polynomials \(\mathrm{A}_{n} (\mathrm{y})\) [31, 32] given by
Using Eqs. (19) and (20) in Eq. (18), we get
which is the coupled \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) and \(\mathrm{HP}\mathbb{M}\) via He’s polynomials. The approximation can be easily obtained by comparing all like powers of the coefficients q as follows
Then the solution is
Finally, to authenticate the obtained solution, we will establish results on the uniqueness and convergence of the solution. To prove the results, we will consider the Banach space \([0,\tau _{\circ}]\) of all functions continuous on \([0,\tau _{\circ}]\) with supremum norm. Furthermore, we will assume that \(\mathrm{y}(u,\nu ), \mathrm{y}_{n}(u,\nu ) \in [0, \tau _{\circ}]\).
Theorem 4.1
(Uniqueness theorem)
The solution obtained by \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) of \(\mathbb{FPDE}s\) (14) has a unique solution, whenever \(0<\gamma <1\).
Proof
The solution of Eq. (14) is of the form \(\mathrm{y}(u,\nu ) = \sum_{n=0}^{\infty}\mathrm{q}^{n} \mathrm{y}_{n}(u,\nu )\), where
Let \(\mathrm{y}(u,\nu )\) & \(\acute{\mathrm{y}}(u,\nu )\) be two distinct solutions of Eq. (14), then we have
Using Theorem 3.4, we get
We now assume that \(\mathcal{N}_{1}\) and \(\mathcal{N}_{2}\) satisfy the Lipschitz condition, so \(\mathcal{N}_{2}\) is a bounded operator with
for \(\lambda _{1}>0\), and \(\mathcal{N}_{1}\) is given by
for \(\lambda _{2}>0\). Then the above equation can be written as
Now, using mean value theorem of Con-integral calculus [33],
where
Hence
where \(\gamma = ( \lambda _{1}+\lambda _{2} ) \frac{\breve{M}\tau _{\circ}^{\upalpha}}{\upalpha}\). So, \((1 - \gamma )| \mathrm{y}(u,\nu ) - \acute{\mathrm{y}}(u,\nu ) | \leq 0\), implies \(\mathrm{y}(u,\nu ) = \acute{\mathrm{y}}(u,\nu )\) whenever, \(0<\gamma <1\). □
Theorem 4.2
Assume that initial guess \(\mathrm{y}_{0}\) remains inside the ball \(\pmb{B}(\mathrm{y},r)\) of the solution \(\mathrm{y}(u,\nu )\). Then, the series solution \(\sum_{n=0}^{\infty} \mathrm{y}_{n}\) is convergent if \(\exists \epsilon \in (0,1)\) such that \(\lVert \mathrm{y}_{n+1} \rVert \leq \epsilon \lVert \mathrm{y}_{n} \rVert \).
Proof
We need to prove that partial sums \({s_{n}}= \sum_{n=0}^{n}\mathrm{y}_{n}\) is a Cauchy sequence in \((C[0,\tau _{\circ}], \lVert \cdot \rVert )\). As
Hence
Since \(\epsilon \in (0,1)\), hence
\(\mathrm{y}_{0}\) is also bounded; therefore, \(\lVert s_{n}-s_{m} \rVert \to 0\) as \(m,n \to \infty \). Hence \(s_{n}\) is a Cauchy sequence in \((C[0,\tau _{\circ}], \lVert \cdot \rVert )\), so \(\sum_{n=0}^{\infty} \mathrm{y}_{n}(u,\nu )\) is convergent. □
Remark 4.1
Note that th \(\frac{\epsilon ^{m+1}}{1-\epsilon} \lVert \mathrm{y}_{0} \rVert \) is the maximum truncation error of \(\mathrm{y}(u,\nu )\).
5 Applications of the proposed technique
In this section, we apply the \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) for solving \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\).
Example 5.1
Consider \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\) as follows
If \(\upalpha = 1\), then Eq. (25) becomes the classical \(\mathbb{N}\mathbbm{-}\mathbb{PDE}\) [20]. By taking \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) on both sides of the equation and from the properties of \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), Eq. (25) reduces to
Using \(\mathbb{I}\mathbbm{.}\mathbb{C}\) and inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we have
After applying the \(\mathrm{HP}\mathbb{M}\), we have
where
Here, \(\mathrm{A}_{n} (\mathrm{y})\) are He’s polynomials that represent the non-linear term. So, we have the first few components of He’s polynomials
and so on. Comparing the coefficients of like power of q, we get
Similarly, the approximations may be obtained in the following way
and so on. Substituting Eqs. (31) and (32) in the following equation
we get
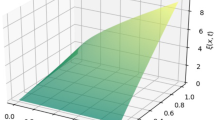
The numerical solution for various values of α, i.e., for \(\upalpha =0.5, 0.7\), is given in Fig. 1. For \(\upalpha =1\) as a special case, we have the solution, \(\mathrm{y}(u,\nu )= \frac{u}{\nu -1} \), which is the same solution as in [20].

Numerical solution using \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) in Example 5.1 for \(\upalpha =0.5, 0.7\)
Example 5.2
Consider \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}\) as follows
If \(\upalpha =1\), then for \(m=1\), Eq. (36) becomes the classical porous medium equation \(\mathbb{PDE}\) [24], given by
Taking \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) on both sides of the Eq. (36) and using properties of \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we have
Applying inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) subject to the \(\mathbb{I}\mathbbm{.}\mathbb{C}\mathbbm{.}\), we get
With the help of \(\mathrm{HP}\mathbb{M}\), the above equation can be written as
where
Here, \(\mathrm{A}_{n} (\mathrm{y})\) are He’s polynomials that represent the non-linear term. The first few terms of He’s polynomials are
and so on. The like powers of the coefficient, q can be equated as
Similarly, the approximations may be obtained in the following way
and so on. Substituting Eqs. (40) and (41) in the following equation
we have
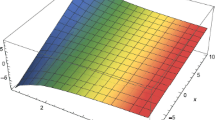
The numerical solution for different values of α, i.e., for \(\upalpha =0.5, 0.7\), is presented in Fig. 2. For \(\upalpha =1\), we have the classical solution subject to \(\mathbb{I}\mathbbm{.}\mathbb{C}\mathbbm{.}\), of the Eq. (36) as
which is the same solution as in [24].

Numerical solution using \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) in Example 5.2 for \(\upalpha =0.5, 0.7\)
Example 5.3
Consider the time-fractional non-dimensional Fisher equation
For \(\upalpha =1\), we have the classical non-dimensional Fisher equations [34] as follows
Taking \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) on both sides of the Eq. (46) and using the properties of \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we have
By rearranging all the terms appropriately, the above equation becomes
Using \(\mathbb{I}\mathbbm{.}\mathbb{C}\mathbbm{.}\) and inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we reduce Eq. (49) to
After successful application of the \(\mathrm{HP}\mathbb{M}\), we get
where
Here, \(\mathrm{A}_{n} (\mathrm{y})\) are He’s polynomials that represent the non-linear terms, and the first three components of He’s polynomials are
and so on. Comparing like powers of the coefficient q, we get
Similarly, the approximations may be obtained in the following way
and so on. Using Eqs. (51) and (52) in the following equation
we get
such that \(| \lambda (e^{\frac{\nu ^{\upalpha}}{\upalpha}}-1)| <1\). The numerical solution for different values of α and λ, i.e., for \(\upalpha =0.5, 0.7\) and \(\lambda =0.1, 0.5\), is given in Fig. 3. For \(\upalpha =1\) as a special case, we have the classical solution of the problem as follows:
which is the same solution in [34].

Numerical solution using \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) in Example 5.3 for \(\upalpha =0.5, 0.7\) and \(\lambda =0.1, 0.5\)
Example 5.4
Consider the time-fractional (2 + 1)-dimensional Burger equation
If we put \(\upalpha =1\), we have the classical (2 + 1)-dimensional Burger equation [35]. Taking \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) on both sides of the Eq. (54) and using properties of \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\), we have
Now, taking inverse \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\) subject to \(\mathbb{I}\mathbbm{.}\mathbb{C}\)., we get
Finally, applying HPM, we have
where
Here, \(\mathrm{A}_{n} (\mathrm{y})\) are He’s polynomials that represent the non-linear terms, and one can write the first few components of He’s polynomials as follows
and so on. By comparing the like coefficient of the power of q, we get
Similarly, the approximations may be obtained in the following way
and so on. Substituting the above values in the following equation:
we get,
The numerical solution for different values of α, i.e., for \(\upalpha =0.5, 0.7\), is presented in Fig. 4. For \(\upalpha =1\), we have the classical solution of the problem as follows
which is the same solution as given in [35].

Numerical solution using \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) in Example 5.4 for \(\upalpha =0.5, 0.7\)
Remark 5.1
The above example can easily be generalized to the case of time fractional (\(n+ 1\))-dimensional Burger’s equation.
with \(\mathbb{I}\mathbbm{.}\mathbb{C}\mathbbm{.}\), \(\mathrm{y}(u_{1},u_{2},\dots , u_{n}, 0)=u_{1} + u_{2}+ \cdots +u_{n}\). If \(\upalpha =1\), then Eq. (61) becomes the classical \((n+1)\)-dimensional Burger equation [35]. Repeating the similar procedure, we have
where
and so on. Comparing the power of the coefficient q, we have
and also
and so on. Therefore, substituting Eqs. (63) and (64) in the following equation
we obtain
For \(\upalpha =1\) as a special case, the classical solution can be found as follows:
which is the same solution as in [35].
6 Conclusion
In this paper, we have presented \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) as a novel approach for solving \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\). We have also established the results on the uniqueness and convergence of the solution. The numerical results show that the suggested method is effective in finding exact and approximate solutions for \(\mathbb{N}\mathbbm{-}\mathbb{TFPDE}s\). The efficiency and approximation of the given technique have been verified through four different problems. Moreover, it is interesting to note that \(\mathbb{C}_{\mathcal{D}}\mathrm{E}\mathbb{T}\mathrm{HP}\mathbb{M}\) is able to significantly reduce the amount of computing work required compared to traditional approaches while retaining good numerical accuracy. The suggested technique has a distinct advantage over the decomposition method and can handle non-linear problems without using Adomian polynomials. Finally, this approach can be used to solve a variety of both linear and non-linear \(\mathbb{TFPDE}s\).
Availability of data and materials
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Kilbas, A.A., Srivastava, H.M., Trujillo, J.J.: Theory and Applications of Fractional Differential Equations. Elsevier, vol. 204. The, Netherlands (2006)
Samei, M.E., Hedayati, V., Rezapour, S.: Existence results for a fraction hybrid differential inclusion with Caputo-Hadamard type fractional derivative. Adv. Differ. Equ. 2019, 163 (2019). https://doi.org/10.1186/s13662-019-2090-8
Khalil, R., Al Horani, M., Yousef, A., Sababheh, M.: A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014)
Boutiara, A., Benbachir, M., Kaabar, M.K.A., Martínez, F., Samei, M.E., Kaplan, M.: Explicit iteration and unbounded solutions for fractional q-difference equations with boundary conditions on an infinite interval. J. Inequal. Appl. 2022, 29 (2020). https://doi.org/10.1186/s13660-022-02764-6
Kaabar, M.K.A., Kalvandi, V., Eghbali, N., Samei, M.E., Siri, Z., Martínez, F.: Generalized Mittag-Leffler-Hyers-Ulam stability of a quadratic fractional integral equation. Nonlinear Eng. 10, 414–427 (2021). https://doi.org/10.1515/nleng-2021-0033
Samei, M.E., Ghaffari, R., Yao, S.W., Kaabar, M.K.A., Martínez, F., Inc, M.: Existence of solutions for a singular fractional q-differential equations under Riemann–Liouville integral boundary condition. Symmetry 13, 135 (2021). https://doi.org/10.3390/sym13071235
Samei, M.E., Rezapour, S.: On a system of fractional q-differential inclusions via sum of two multi-term functions on a time scale. Bound. Value Probl. 2020, 135 (2020). https://doi.org/10.1186/s13661-020-01433-1
Abdeljawad, T.: On conformable fractional calculus. J. Comput. Appl. Math. 279, 57–66 (2015)
Rezapour, S., Samei, M.E.: On the existence of solutions for a multi-singular point-wise defined fractional q-integro-differential equation. Bound. Value Probl. 2020, 38 (2020). https://doi.org/10.1186/s13661-020-01342-3
Kiskinov, H., Petkova, M., Zahariev, A.: Remarks about the existence of conformable derivatives and some consequences (2019). Preprint arXiv:1907.03486
Abdeljawad, T., Samei, M.E.: Applying quantum calculus for the existence of solution of q-integro-differential equations with three criteria. Discrete Contin. Dyn. Syst., Ser. S 14(10), 3351–3386 (2021). https://doi.org/10.3934/dcdss.2020440
Zhao, D., Luo, M.: General conformable fractional derivative and its physical interpretation. Calcolo 54(3), 903–917 (2017)
Khalil, R., Al Horani, M., Hammad, M.A.: Geometric meaning of conformable derivative via fractional cords. J. Math. Comput. Sci. 19, 241–245 (2019)
Clemence-Mkhope, D.P., Clemence-Mkhope, B.G.: The limited validity of the conformable Euler finite difference method and an alternate definition of the conformable fractional derivative to justify modification of the method. Math. Comput. Appl. 26(4), 66 (2021)
He, J.-H.: Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 178(3–4), 257–262 (1999)
He, J.-H.: A coupling method of a homotopy technique and a perturbation technique for non-linear problems. Int. J. Non-Linear Mech. 35(1), 37–43 (2000)
Babolian, E., Azizi, A., Saeidian, J.: Some notes on using the homotopy perturbation method for solving time-dependent differential equations. Math. Comput. Model. 50(1–2), 213–224 (2009)
Bhadane, P.K.G., Pradhan, V.: Application of laplace transform homotopy perturbation method to gas dynamic equation: a modified approach
Jassim, H.K.: Homotopy perturbation algorithm using Laplace transform for Newell-Whitehead-Segel equation. Int. J. Adv. Appl. Math. Mech. 2(4), 8–12 (2015)
Elzaki, T.M., Hilal, E.M., Arabia, J.-S., Arabia, J.-S.: Homotopy perturbation and Elzaki transform for solving nonlinear partial differential equations. Math. Theory Model. 2(3), 33–42 (2012)
Anaç, H.: New approximate-analytical solutions to nonlinear time-fractional partial differential equations via homotopy perturbation Elzaki transform method. Journal of Balıkesir Üniversitesi Fen Bilimleri Enstitüsü Dergisi 24(2), 468–482 (2022). https://doi.org/10.25092/baunfbed.984440
Anaç, H., Merdan, M., Kesemen, T.: Homotopy perturbation Elzaki transform method for obtaining the approximate solutions of the random partial differential equations. Gazi Univ. J. Sci. 35(3), 1051–1060 (2022). https://doi.org/10.35378/gujs.798705
Bhadane, P.K.G., Pradhan, V.: Elzaki transform homotopy perturbation method for solving gas dynamics equation. Int. J. Res. Eng. Technol. 2(12), 260–264 (2013)
Bhadane, P.K.G., Pradhan, V.: Elzaki transform homotopy pertubation method for solving porous medium equation. Int. J. Res. Eng. Technol. 2(12), 116–119 (2013)
Silva, F.S., Moreira, D.M., Moret, M.A.: Conformable Laplace transform of fractional differential equations. Axioms 7(3), 55 (2018)
Miller, K.S., Ross, B.: An Introduction to the Fractional Calculus and Fractional Differential Equations. Wiley, New York (1993)
Elzaki, T.M.: The new integral transform Elzaki transform. Glob. J. Pure Appl. Math. 7(1), 57–64 (2011)
Elzaki, T.M.: Application of new transform “Elzaki transform” to partial differential equations. Glob. J. Pure Appl. Math. 7(1), 65–70 (2011)
Khan, Y., Wu, Q.: Homotopy perturbation transform method for nonlinear equations using he’s polynomials. Comput. Math. Appl. 61(8), 1963–1967 (2011)
Mohyud-Din, S.T., Yildirim, A.: Homotopy perturbation method for advection problems. Nonlinear Sci. Lett. A, Math. Phys. Mech. 1, 307–312 (2010)
He, J.-H.: Homotopy perturbation method: a new nonlinear analytical technique. Appl. Math. Comput. 135(1), 73–79 (2003)
He, J.-H.: Application of homotopy perturbation method to nonlinear wave equations. Chaos Solitons Fractals 26(3), 695–700 (2005)
Martínez, F., Martínez, I., Kaabar, M.K., Ortíz-Munuera, R., Paredes, S.: Note on the conformable fractional derivatives and integrals of complex-valued functions of a real variable. IAENG Int. J. Appl. Math. 50(3), 609–615 (2020)
Loyinmi, A.C., Akinfe, T.K.: Exact solutions to the family of Fisher’s reaction-diffusion equation using Elzaki homotopy transformation perturbation method. Eng. Rep. 2(2), 12084 (2020)
Elzaki, T.M., Kim, H.: The solution of Burger’s equation by Elzaki homotopy perturbation method. Appl. Math. Sci. 8(59), 2931–2940 (2014)
Acknowledgements
Not applicable.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
SI: Actualization, methodology, formal analysis, validation, investigation, and initial draft. FM: Actualization, methodology, formal analysis, validation, investigation, and initial draft. MKAK: Actualization, methodology, validation, investigation, initial draft, formal analysis and supervision of the original draft, editing. MES: Actualization, methodology, formal analysis, validation, investigation, software, simulation, initial draft and was a major contributor in writing the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Iqbal, S., Martínez, F., Kaabar, M.K.A. et al. A novel Elzaki transform homotopy perturbation method for solving time-fractional non-linear partial differential equations. Bound Value Probl 2022, 91 (2022). https://doi.org/10.1186/s13661-022-01673-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13661-022-01673-3