
Abstract
In this work, we applied the differential transform method, by presenting and proving some theorems, to solve the nonlinear integro-differential equation with proportional delays. This technique provides a sequence of functions which converges to the exact solution of the problem. In order to show the power and the robustness of the method and to illustrate the pertinent features of related theorems, some examples are presented.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Delay integro-differential equations (DIDEs) are often used to model of some problems with aftereffect in mechanics and the related scientific fields. Many typical examples such as stress–strain states of materials, motion of rigid bodies, aeroauto-elasticity problems and models of polymer crystallization can be found in Kolmanovskii and Myshkis’s [1] monograph and the references there in.
In this paper, we consider the following nonlinear integro-differential equations with proportional delay [2–9]:
where K = K(t, s, u(q 0 s), u′(q 1 s), …, u (m)(q m s)), is the kernel function, \(u\in \mathbb{R}\) is an unknown function, f, K, are given functions with appropriate domains of definition, p i , q j , r ∈ (0, 1), for i = 0, 1, …, n, j = 0, 1, …, m, and m < n.
In recent years, the differential transform method (DTM) has been developed for solving ordinary and partial differential equations. It is a semi-numerical/analytic technique that formalizes the Taylor series in a totally different manner. It was first introduced by Zhou [10] in a study about electrical circuits. The DTM obtains an analytical solution in the form of a polynomial. It is different from the traditional high-order Taylor series method, which requires symbolic competition of the necessary derivatives of the data functions. The Taylor series method is computationally taken long time for large orders. With this method, it is possible to obtain highly accurate results or exact solutions for differential equations. The differential transform is an iterative procedure for obtaining analytic Taylor series solutions of differential equations. DTM has been successfully applied to solve many nonlinear problems arising in engineering, physics, mechanics, biology, etc. Abazari et al. [11] are also employed DTM on some PDEs and their coupled version in and applied it to solve the second-order IVP and BVP of Matrix Differential Models [12].
Recently, Abazari et al., [13] employed RDTM to study the partial differential equation with proportional delay, and [14] applied RDTM on simulation of generalized Hirota–Satsuma coupled KdV equation. The purpose of this research is to employ DTM, mentioned in [13], to apply for Eq. (1).
2 Differential transform method
An arbitrary function u(t) can be expanded in Taylor series about a point t = t 0 as
If U(k) is defined as
where k = 0, 1, …, ∞, then Eq. (2) is reduced to
The U(k), defined in Eq. (4), is called the differential transform of function u(t). The following theorems that can be deduced from Eqs. (3) and (4) are given below.
Theorem 1
Assume that W(k), U(k) and V(k) are the differential transforms of the functions w(t), u(t) and v(t), respectively, then
-
(a)
If w(t) = u(t) ± v(t), then W(k) = U(k) ± V(k).
-
(b)
If w(t) = λ u(t), then W(k) = λ U(k).
-
(c)
If \(w(t)=\frac{{\rm d}^mu(t)}{{\rm d}t^m},\) then \(W(k)=\frac{(k+m)!}{k!}U(k+m).\)
-
(d)
If w(t) = u(t)v(t), then \(W(k)=\sum\nolimits_{{\ell}=0}^kU({\ell})V(k-{\ell}).\)
-
(e)
If w(x) = t m then \(W(k)=\delta(k-m)= \left\{\begin{array}{*{20}c} 1 \hfill & {k = m,} \hfill \\ 0 \hfill & {{\text{otherwise}}} \hfill \\ \end{array}\right.\)
Proof
See ([10], and their references). \(\square\)
3 Applications of differential transform method on Eq. (1)
In this section, we extend the one-dimensional transform method for approximating the Eq. (1). First, using the concept of differential transform method, we formulate the following Lemma.
Lemma 1
Assume that W(k) and U(k) are the differential transforms of the functions w(t) and u(t), respectively, and q, r, ∈ (0, 1), then
-
(a)
If w(t) = u(qt), then W(k) = q k U(k).
-
(b)
If \(w(t)=\frac{{\rm d}^m}{{\rm d}t^m}u(qt),\) then \(W(k)=\frac{(k+m)!}{k!}q^{k+m}U(k+m).\)
-
(c)
If \(w(t) = \int_{0}^{{rt}} {u(qs){\text{d}}s}\), then \(W(k)=\frac{1}{k}r^kq^{k-1}U(k-1), k=1,2,\ldots .\)
Proof
-
(a)
From the Eq. (3), we get
$$ \frac{{\rm d}^k}{{\rm d}t^k}w(t)=\frac{{\rm d}^k}{{\rm d}t^k}[u(qt)] =q^k\frac{{\rm d}^k}{{\rm d}\tilde{t}^k}u(\tilde{t}), $$where \(\tilde{t}=qt,\) therefore
$$ \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}=q^k\left[\frac{{\rm d}^k} {{\rm d}\tilde{t}^k}u(\tilde{t})\right]_{t=t_0}=q^kk!U(k), $$hence by (3)
$$ W(k)=\frac{1}{k!}\left[\frac{{\rm d}^kw(t)}{{\rm d}t^k}\right]_{t=0} =\frac{1}{k!}q^kk!U(k)=q^kU(k), $$where k = 0, 1, …, ∞.
-
(b)
From part (a), we get
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}&=q^{k+m} \left[\frac{{\rm d}^{k+m}}{{\rm d}\tilde{t}^{k+m}}u(\tilde{t})\right]_{t=0} \\ &= (k+m)!q^{k+m}U(k+m),\\ \end{aligned} $$then
$$ W(k)=\frac{1}{k!}\left[\frac{{\rm d}^kw(t)}{{\rm d}t^k}\right]_{t=0} =\frac{(k+m)!}{k!}q^{k+m}U(k+m). $$ -
(c)
We get \(\frac{{\rm d}^k}{{\rm d}t^k}w(t)=r\frac{{\rm d}^{k-1}}{{\rm d}t^{k-1}}u(rqt),\) then
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}&=r(k-1)!(rq)^{k-1}U(k-1) \\ &=(k-1)!r^kq^{k-1}U(k-1)\\ \end{aligned} $$hence, by (3), and for k = 1, 2, …, N we have
$$ W(k)=\frac{1}{k!}\left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0} =\frac{1}{k}r^kq^{k-1}U(k-1) $$
and therefore, the proof is completed. \(\square\)
By Lemma 1, we easily obtain the following Theorems.
Theorem 2
Assume that W(k), U 1(k) and U 2(k) are the differential transforms of the functions w(t), u 1(t) and u 2(t), respectively, and q 1, q 1 ∈ (0, 1), then
-
(2-a)
If w(t) = u 1(q 1 t)u 2(q 2 t), then for \(k=0,1,2,\ldots,N\)
$$ W(k)=\sum_{\ell=0}^kq_1^{\ell}q_2^{k-\ell}U_1(\ell)U_2(k-\ell). $$ -
(2-b)
If \(w(t)=\int_{0}^{rt}u_1(q_1s)u_2(q_2s){\rm d}s,\) then for \(k=1,2,\ldots,N\)
$$ W(k)=\frac{1}{k}\sum_{\ell=0}^{k-1}r^kq_1^{\ell}q_2^{k-\ell-1} U_1(\ell)U_2(k-\ell-1). $$ -
(2-c)
If \(w(t)=u(p t)\int_{0}^{rt}v_1(q_1s)v_2(q_2s){\rm d}s,\) then for \(k=1,2,\ldots,N\)
$$ W(k)=\sum_{\ell=0}^{k-1}\sum_{s=0}^{k-\ell-1}\frac{1}{k-\ell} r^{k-\ell}p^{\ell} q_1^{s} q_2^{k-\ell-s-1}U(\ell)V_1(s)V_2(k-\ell-s-1). $$
Proof
-
(2-a)
From the Lemma 1, and Leibnitz formula, we get
$$ \begin{aligned} \frac{{\rm d}^kw(t)}{{\rm d}t^k}&=\frac{{\rm d}^k}{{\rm d}t^k}\left[u_1(q_1t)u_2(q_2t)\right] \\ &=\sum_{\ell=0}^k {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}q_1^{\ell}\frac{{\rm d}^{\ell}}{{\rm d}\tilde{t}^{\ell}} u_1(\tilde{t})q_2^{k-\ell}\frac{{\rm d}^{k-\ell}} {{\rm d}\hat{t}^{k-\ell}}u_2(\hat{t}), \end{aligned} $$where \(\hat{t}=q_1t,\) and \(\tilde{t}=q_1t,\) therefore,
$$ \begin{aligned} \left[\frac{{\rm d}^kw(t)}{{\rm d}t^k}\right]_{t=0}& =\sum_{\ell=0}^k {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}\left[q_1^{\ell}\ell!U_1(\ell)\right] \left[q_2^{k-\ell}(k-\ell)!U_2(k-\ell)\right] \\ &=\sum_{\ell=0}^k k!q_1^{\ell}q_2^{k-\ell}U_1(\ell)U_2(k-\ell), \end{aligned} $$then, from Eq. (3), we get
$$ W(k)=\frac{1}{k!}\left[\frac{{\rm d}^kw(t)}{{\rm d}t^k}\right]_{t=0}=\sum_{\ell=0}^k q_1^{\ell}q_2^{k-\ell}U_1(\ell)U_2(k-\ell). $$where \(k=0,1,\ldots,\infty. \)
-
(2-b)
Similar to previous parts, we get
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)&=r\frac{{\rm d}^{k-1}}{{\rm d}t^{k-1}} [u_1(rq_1t)u_1(rq_1t)]\\ &=r\sum_{\ell=0}^{k-1}{\left( {\begin{array}{*{20}c} k-1 \\ \ell \\ \end{array} } \right)}(rq_1)^{\ell}\frac{{\rm d}^{\ell}}{{\rm d}\hat{t}^{\ell}}u_1 (\hat{t}) (rq_2)^{k-\ell-1}\frac{{\rm d}^{k-\ell-1}} {{\rm d}\check{t}^{k-\ell-1}}u_2(\check{t}), \end{aligned} $$then
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0} =r\sum_{\ell=0}^{k-1}{\left( {\begin{array}{*{20}c} k-1 \\ \ell \\ \end{array} } \right)}(rq_1)^{\ell}\ell!U_1(\ell) (rq_2)^{k-\ell-1}(k-\ell-1)!U_2(k-\ell-1). \end{aligned} $$hence by Eq. (3), and for \( k=1,2,\ldots,N,\) we obtain
$$ \begin{aligned} W(k)&=\frac{1}{k!}\left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0} \\ &=\frac{1}{k}\sum_{\ell=0}^{k-1}r^kq_1^{\ell} q_2^{k-\ell-1}U_1(\ell)U_2(k-\ell-1).\\ \end{aligned} $$ -
(2-c)
Let \( y(t)=\int_{0}^{rt}v_1(q_1s)v_2(q_2s){\rm d}s,\) then from previous parts, we get
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)&=\frac{{\rm d}^{k}}{{\rm d}t^{k}}\left[u(p t)y(t)\right] \\ &=\sum_{\ell=0}^{k}{\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}p^{\ell}\frac{{\rm d}^{\ell}}{{\rm d}\hat{t}^{\ell}} u(\hat{t}) \frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t)\\ \end{aligned} $$where \(\hat{t}=pt,\) and
$$ \begin{aligned} \frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t)&= r\frac{{\rm d}^{k-\ell-1}} {{\rm d}t^{k-\ell-1}}\left[v_1(rq_1t)v_2(rq_2t)\right] \\ &= r\sum_{s=0}^{k-\ell-1}{\left( {\begin{array}{*{20}c} k-l-1 \\ s \\ \end{array} } \right)} (rq_1)^s\frac{{\rm d}^s}{{\rm d}\tilde{t}^s}v_1(\tilde{t}) (rq_2)^{k-\ell-s-1}\frac{{\rm d}^{k-\ell-s-1}}{{\rm d}\check{t}^{k-\ell-s-1}} v_2(\check{t})\\ \end{aligned} $$where \(\tilde{t}=rq_1\tilde{t}\) and \(\check{t}=rqt, \) then
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}&=\sum_{\ell=0}^{k} \sum_{s=0}^{k-\ell-1} {\left( {\begin{array}{*{20}l} k \\ \ell \\ \end{array} } \right)} {\left( {\begin{array}{*{20}l} k-l-1 \\ s \\ \end{array} } \right)} \left[r^{k-\ell}p^{\ell} q_1^{s} q_2^{k-\ell-s-1}\ell! s! (k-\ell-s-1)! \right.\\ \left. U(\ell)V_1(s)V_2(k-\ell-s-1)\right].\\ \end{aligned} $$but for \(\ell=k\), we have
$$ \left[\frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t)\right]_{t=0}=0, $$then by Eq. (3), for \(k=1,2,\ldots,N\) we obtained
$$ \begin{aligned} W(k)=\sum_{\ell=0}^{k-1}\sum_{s=0}^{k-\ell-1}\frac{1}{k-\ell} r^{k-\ell}p^{\ell} q_1^{s} q_2^{k-\ell-s-1}U(\ell)V_1(s)V_2(k-\ell-s-1). \end{aligned} $$
and therefore, the proof completed. \(\square\)
Theorem 3
Assume that W(k), U 1(k) and U 2(k) are the differential transforms of the functions w(t), u 1(t) and u 2(t), respectively, and \(q_1,q_1\in(0,1),\) then
-
(3-a)
If \(w(t)=\frac{{\rm d}^n}{{\rm d}t^n}u_1(q_1t)\frac{{\rm d}^m}{{\rm d}t^m}u_2(q_2t),\) then for \(k=0,1,2,\ldots,N\)
$$ W(k)=\sum_{\ell=0}^kq_1^{\ell+n}q_2^{k-\ell+m}\frac{(\ell+n)! (k-\ell+m)!}{\ell!(k-\ell)!}U_1(\ell+n)U_2(k-\ell+m). $$ -
(3-b)
If \(w(t)=\int_{0}^{rt}\frac{{\rm d}^n}{{\rm d}t^n}u_1(q_1s)\frac{{\rm d}^m}{{\rm d}t^m}u_2(q_2s){\rm d}s,\) then for \(k=1,2,\ldots,N\)
$$ W(k)=\!\frac{1}{k}\sum_{\ell=0}^{k-1}\frac{(\ell\!+\!n)! (k\!-\!\ell\!+\!m\!-\!1)!}{\ell!(k\!-\!\ell\!-\!1)!} r^{k+n+m}q_1^{\ell+n}q_2^{k-\ell+m-1}U_1(\ell\!+\!n)U_2 (k\!-\!\ell\!+\!m\!-\!1). $$ -
(3-c)
If \(w(t)=\frac{{\rm d}^\lambda}{{\rm d}t^\lambda}u(p t)\int_{0}^{rt}\frac{{\rm d}^n}{{\rm d}t^n}v_1(q_1s)\frac{{\rm d}^m}{{\rm d}t^m}v_2(q_2s){\rm d}s,\) then for \(k=1,2,\ldots,N\)
$$ \begin{aligned} W(k)&=\sum_{\ell=0}^{k-1}\sum_{s=0}^{k-\ell-1} \left[\frac{1}{k-\ell}\frac{(\ell+\lambda)!(s+n)!(k-\ell-s+m-1)!} {\ell!s!(k-\ell-s-1)!} \right.\\ &\quad \left. p^{\ell+\lambda} r^{k-\ell+n+m} q_1^{s+n} q_2^{k-\ell-s+m-1}U(\ell\!+\!\lambda)V_1(s\!+\!n) V_2(k\!-\!\ell\!-\!s\!+\!m\!-\!1)\right]. \end{aligned} $$
Proof
-
(3-a)
From the Lemma 1, and Leibnitz formula, we get
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)&=\frac{{\rm d}^k}{{\rm d}t^k}\left[\frac{{\rm d}^n}{{\rm d}t^n}u_1(q_1t) \frac{{\rm d}^m}{{\rm d}t^m}u_2(q_2t)\right]\\ &=\sum_{\ell=0}^k {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}q_1^{\ell+n}\frac{{\rm d}^{\ell+n}} {{\rm d}\tilde{t}^{\ell+n}} u_1(\tilde{t})q_2^{k-\ell+m}\frac{{\rm d}^{k-\ell+m}} {{\rm d}\hat{t}^{k-\ell+m}}u_2(\hat{t}), \end{aligned} $$where \(\tilde{t}=q_1t,\) and \(\hat{t}=q_2t,\) therefore
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}&=\sum_{\ell=0}^k {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}\left[q_1^{\ell+n}(\ell+n)!U_1(\ell+n)\right] \left[q_2^{k-\ell+m}(k-\ell+m)!U_2(k-\ell+m)\right]\\ &=\sum_{\ell=0}^k \frac{k!(\ell+n)!(k-\ell+m)!}{\ell!(k-\ell)!} q_1^{\ell+n}q_2^{k-\ell+m}U_1(\ell+n)U_2(k-\ell+m), \end{aligned} $$then from Eq. (3), we obtained
$$ W(k)=\sum_{\ell=0}^kq_1^{\ell+n}q_2^{k-\ell+m}\frac{(\ell+m)! (k-\ell+m)!}{\ell!(k-\ell)!}U_1(\ell+n)U_2(k-\ell+m). $$ -
(3-b)
Similar to previous parts, we get
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)&=r\frac{{\rm d}^{k-1}}{{\rm d}t^{k-1}}\left[\frac{{\rm d}^n} {{\rm d}t^n}u_1(rq_1t)\frac{{\rm d}^m}{{\rm d}t^m}u_2(rq_2t)\right]\\ &=r\sum_{\ell=0}^{k-1}{\left( {\begin{array}{*{20}c} k-1 \\ \ell \\ \end{array} } \right)}(rq_1)^{\ell+n} \frac{{\rm d}^{\ell+n}}{{\rm d}\hat{t}^{\ell+n}}u_1(\hat{t}) (rq_2)^{k-\ell+m-1}\frac{{\rm d}^{k-\ell+m-1}}{{\rm d}\check{t}^{k-\ell+m-1}} u_2(\check{t}), \end{aligned} $$then
$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}\!=\!r\sum_{\ell=0}^{k-1} {\left( {\begin{array}{*{20}c} k-1 \\ \ell \\ \end{array} } \right)}(rq_1)^{\ell+n}(\ell\!+\!n)!U_1(\ell\!+\!n)\\ (rq_2)^{k-\ell+m-1}(k\!-\!\ell\!+\!m\!-\!1)!U_2(k\!-\!\ell\!+\!m\! -\!1).\\ \end{aligned} $$hence by Eq. (3), and for \(k=1,2,\ldots,N\) we have
$$ \begin{aligned} W(k)\!=\!\frac{1}{k}\sum_{\ell=0}^{k-1}\frac{(\ell\!+\!n)! (k\!-\!\ell\!+\!m\!-\!1)!}{\ell!(k\!-\!\ell\!-\!1)!} r^{k+n+m}q_1^{\ell+n}q_2^{k-\ell+m-1}U_1(\ell\!+\!n)U_2(k\!-\!\ell\!+\!m\!-\!1). \end{aligned} $$ -
(3-c)
Let \( y(t)=\int_{0}^{rt}\frac{{\rm d}^n}{{\rm d}t^n}v_1(q_1s)\frac{{\rm d}^m}{{\rm d}t^m}v_2(q_2s){\rm d}s,\) then from previous parts, we get
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)=\frac{{\rm d}^{k}}{{\rm d}t^{k}}\left[\frac{{\rm d}^{\lambda}u(p t)}{{\rm d}t^{\lambda}}y(t)\right] =\sum_{\ell=0}^{k}{\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}p^{\ell+\lambda}\frac{{\rm d} ^{\ell+\lambda}}{{\rm d}\hat{t}^{\ell+\lambda}}u(\hat{t}) \frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t) \end{aligned} $$where \(\hat{t}=p t,\) and
$$ \begin{aligned} \frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t)&= r\frac{{\rm d}^{k-\ell-1}}{{\rm d}t^{k-\ell-1}} \left[\frac{{\rm d}^n}{{\rm d}t^n}v_1(rq_1t)\frac{{\rm d}^m}{{\rm d}t^m}v_2(rq_2t)\right] \\ &= r\sum_{s=0}^{k-\ell-1}{\left( {\begin{array}{*{20}c} k-l-1 \\ s \\ \end{array} } \right)}(rq_1)^{s+n}\frac{{\rm d}^{s+n}} {{\rm d}\tilde{t}^{s+n}}v_1(\tilde{t}) (rq_2)^{k-\ell-s+m-1} \frac{d^{k-\ell-s+m-1}}{{\rm d}\check{t}^{k-\ell-s+m-1}}v_2(\check{t})\\ \end{aligned} $$where \(\tilde{t}=rq_1\tilde{t}\) and \(\check{t}=rqt, \) then
$$ \begin{aligned} \frac{{\rm d}^k}{{\rm d}t^k}w(t)&=\sum_{\ell=0}^{k}\sum_{s=0}^{k-\ell-1} {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}{\left( {\begin{array}{*{20}c} k-l-1 \\ s \\ \end{array} } \right)} \left[p^{\ell+\lambda} r^{k-\ell+n+m} q_1^{s+n} q_2^{k-\ell-s+m-1}\right. \\ &\left.\frac{{\rm d}^{\ell+\lambda}}{{\rm d}t^{\ell+\lambda}}u(\hat{t})\frac{{\rm d}^{s+n}} {{\rm d}\tilde{t}^{s+n}}v_1(\tilde{t}) \frac{d^{k-\ell-s+m-1}}{{\rm d}\check{t}^{k-\ell-s+m-1}}v_2(\check{t})\right]. \end{aligned} $$$$ \begin{aligned} \left[\frac{{\rm d}^k}{{\rm d}t^k}w(t)\right]_{t=0}&=\sum_{\ell=0}^{k}\sum_{s=0}^{k-\ell-1} {\left( {\begin{array}{*{20}c} k \\ \ell \\ \end{array} } \right)}{\left( {\begin{array}{*{20}c} k-l-1 \\ s \\ \end{array} } \right)} \left[p^{\ell+\lambda} r^{k-\ell+n+m} q_1^{s+n} q_2^{k-\ell-s+m-1}\right. \\ \left.(\ell\!+\!\lambda)!U(\ell\!+\!\lambda)(s\!+\!n)!V_1(s\!+\!n) (k\!-\!\ell\!-\!s\!+\!m\!-\!1)!V_2(k\!-\!\ell\!-\!s\!+\!m\!-\!1)\right].\\ \end{aligned} $$but for \(\ell=k\), we have
$$ \left[\frac{{\rm d}^{k-\ell}}{{\rm d}t^{k-\ell}}y(t)\right]_{t=0}=0, $$then by Eq. (3), for \(k=1,2,\ldots,N\) we obtained
$$ \begin{aligned} W(k)&=\sum_{\ell=0}^{k-1}\sum_{s=0}^{k-\ell-1} \left[\frac{1}{k-\ell}\frac{(\ell+\lambda)!(s+n)!(k-\ell-s+m-1)!} {\ell!s!(k-\ell-s-1)!}\right.\\ \left. p^{\ell+\lambda} r^{k-\ell+n+m} q_1^{s+n} q_2^{k-\ell-s+m-1}U(\ell\!+\!\lambda)V_1(s\!+\!n) V_2(k\!-\!\ell\!-\!s\!+\!m\!-\!1)\right].\\ \end{aligned} $$
and therefore, the proof completed. \(\square\)
4 Numerical examples
In this section, we give the following prototype examples to clarify the accuracy of the presented method. These examples are chosen such that there exist exact solutions for them.
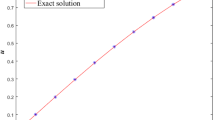
Example 1
In the first example, consider the following nonlinear first-order integro-differential equation with proportional delay
subject to initial condition u(0) = 1. Substituted t = 0, in Eq. (5), we get u′(0) − 1 = 0, then u′(0) = 1.
Using differential transform method, the differential transform version of Eq. (5), for \(k=1,2,\ldots,N\) will be
and the differential transform version of initial conditions u(0) = u′(0) = 1 will be
where U(k) is the differential transform of u(t).
Using Eq. (6), by taking N = 5, the following system is obtained:
Solving the above system and using the inverse transformation rule (3), we get the following series solution
Note that when N > 5 by solving the obtained system, we get the following series solution
The closed form of above series solution is u(t) = e t, which is the exact solution of Eq. (5). Table 1 shows the numerical results of this example.
Example 2
In this example, consider the following nonlinear second-order integro-differential equation with proportional delay
subject to initial condition u(0) = 1, and u′(0) = − 1.
From Theorem (2) and Theorem (3), the differential transformed version of Eq. (9) is
where U(k) is the differential transform of u(t), and the transformed version of initial conditions u(0) = 0 and u′(0) = 1 are
Using Eqs. (10), and (11), and by taking N = 4, the following system for k = 1, 2, 3, 4 is obtained:
Solving the above system and using the inverse transformation rule (3), we get the following series solution
Note that for N > 4, the closed form of above solution is u(t) = e −t, which is the exact solution of Eq. (9). The numerical results of this example are shown in Table 2.
Example 3
Consider the following nonlinear third-order integro-differential equation with proportional delay
subject to initial conditions
where \(f(t)=-\frac{3}{8}e^{t/2}+\frac{5}{8}e^{-t/2}+\frac{1}{2}e^t -\frac{1}{2}e^{-t}.\) Similar to previous examples, the differential transformed version of Eq. (13) for \(k=0,1,2,\ldots,N\) will be
and the differential transform version of initial conditions is
respectively, where U(k) is the differential transform of u(t).
Using Eq. (15), by taking N = 4, the following system is obtained:
Solving the above system by utilizing the (16) and using the inverse transformation rule (3), we get the following series solution
Note that for N > 4, the closed form of above series solution is u(t) = e t − e −t, which is the exact solution of Eq. (13). Table 3 also shows the numerical results of this example.
5 Conclusions
In this work, we have shown that the differential transformation method can be used successfully for solving the nonlinear integro-differential equations with proportional delay. Some theorems are introduced with their proofs, and as application, some prototype examples are carried out. The present method reduces the computational difficulties of the other methods, and all the calculations can be made simple manipulations. The accuracy of the obtained solution can be improved by taking more terms in the solution. In many cases, the series solutions obtained with DTM can be written in exact closed form. So it may be easily applied by researchers and engineers familiar with the Taylor expansion.
References
Kolmanovskii V, Myshkis A (1999) Introduction to the theory and applications of functional differential equations. Kluwer, Dordrecht
Brunner H (2004) Collocation methods for Volterra integral and related functional differential equations. Cambridge University Press, Cambridge
Ahmad B (2011) On nonlocal boundary value problems for nonlinear integro-differential equations of arbitrary fractional order. Results Math. doi:10.1007/s00025-011-0187-9
Brunner H (1994) The numerical solution of neutral Volterra integro-differential equations with delay arguments. Ann Numer Math 1:309–322
Brunner H, Hu Q-Y, Lin Q (2001) Geometric meshes in collocation methods for Volterra integral equations with proportional delays. IMA J Numer Anal 21:783–798
Ali I, Brunner H, Tang T (2009) Spectral methods for pantograph-type differential and integral equations with multiple delays. Frontiers Math China 4:49–61
Iserles A, Liu Y-K (1994) On pantograph integro-differential equations. J Integral Equ Appl 6:213–237
Ali I (2011) Convergence analysis of spectral methods for integro-differential equations with vanishing proportional delays. J Comput Math 29:49–60
Brunner H, Hu QY (2007) Optimal superconvergence results for delay integro-differential equations of pantograph type. SIAM J Numer Anal 45:986–1004
Zhou JK (1986) Differential transformation and its application for electrical circuits. Huazhong University Press, Wuhan
Abazari R, Borhanifar A (2010) Numerical study of the solution of Burgers’ and coupled Burgers’ equations by differential transformation method. Comput Math Appl 59:2711–2722
Abazari R, Kılıcman A (2012) Solution of second-order IVP and BVP of matrix differential models using matrix DTM. Abstr Appl Anal 2012: 11 (Article ID 738346). doi:10.1155/2012/738346
Abazari R, Ganji M (2011) Extended two-dimensional DTM and its application on nonlinear PDEs with proportional delay. Int J Comput Math 88(8):1749–1762
Abazari R, Abazari M (2012) Numerical simulation of generalized Hirota-Satsuma coupled KdV equation by RDTM and comparison with DTM. Commun Nonlinear Sci Numer Simul 17:619–629
Acknowledgments
The authors are deeply grateful to the referees for his/her careful reading and helpful suggestions on the paper. Also, the first author would like to thank the Young Researchers Club, Islamic Azad University, Ardabil Branch for its financial support.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Abazari, R., Kılıcman, A. Application of differential transform method on nonlinear integro-differential equations with proportional delay. Neural Comput & Applic 24, 391–397 (2014). https://doi.org/10.1007/s00521-012-1235-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-1235-4