
Abstract
This paper deals with the convergence and stability of the spectral collocation method for a hyperbolic partial differential equation with piecewise continuous arguments. Firstly, the convergence of continuous-time and discrete-time collocation methods is analyzed by means of equivalent schemes with \(L^2\)-norm rigorously. We obtain the order of convergence of the continuous-time collocation method is \(O(h^4)\) and the discrete-time collocation method is \(O(h^4+p)\), where h and p are spatial step and temporal step, respectively. Secondly, the stability of two numerical schemes is analyzed by Fourier analysis method. It is proven that the continuous-time collocation method is unconditionally stable. The stability conditions for the discrete-time collocation method are derived under which the analytic solution is asymptotically stable. Finally, some numerical experiments are carried out to demonstrate our theoretical results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper we principally investigate theoretical and computational aspects of the spectral collocation method for the numerical solution of following hyperbolic partial differential equation with piecewise continuous arguments (PEPCA)
where \(a, b \in {\mathbb {R}}\), \(\Omega =[0,1]\) with smooth boundary \(\partial \Omega \), \(J=[0, +\infty )\) and \([\cdot ]\) denotes the greatest integer function.
Nowadays, differential equations with piecewise continuous arguments (EPCA) are used to model various different phenomena in economy (Cavalli and Naimzada 2016), competition (Kartal and Gurcan 2015), population growth (Karakoc 2017) and so on. Hence, the extensive applications of delay effects in describing the past and future status of systems show the importance of the theory of EPCA. The study of EPCA was initiated by Aftabizadeh and Wiener (1986). They found that the change of sign in the argument deviation leads to interesting periodic properties, asymptotic and oscillatory behavior of solutions. Since EPCA can hardly be solved by analytical methods or much complicated to deal with, the numerical analysis of EPCA is currently an active area of research, which although start a little late. And there has been a number of literatures on numerical methods for EPCA, see Gao (2017), Liu and Zeng (2018), Milošević (2016), Wang and Wang (2018), Wang et al. (2011) and Zhang et al. (2018). However, the numerical methods in these papers mainly focus on the EPCA in case of ordinary differential equations. Up to now there has existed some literatures about PEPCA with various numerical methods (Liang et al. 2010a, b; Wang 2017; Wang and Wen 2014; Wang and Wang 2019). Parabolic PEPCA was investigated with the \(\theta \)-method (Liang et al. 2010a) and Galerkin finite element method (Liang et al. 2010b). In Wang and Wen (2014), the \(\theta \)-method was also applied to another PEPCA of mixed type and the sufficient conditions for the numerical stability were established. In addition, Wang and Wang (2019) considered the analytical and numerical stability of PEPCA of alternately retarded and advanced type in the \(\theta \)-schemes and achieved the corresponding stability conditions. For more information on PEPCA, the interested readers can refer to publications (Wiener and Debnath 1992, 1997; Wiener and Heller 1986; Bereketoglu and Lafci 2017) and the references contained therein.
The spectral methods have been developed to investigate all kind of equations in the recent two decades, which are known generally as the method of weighted residuals with distinctive feature that the trial functions are used as the basis functions for a truncated series expansion of solution. The Galerkin method, collocation method and Tau method are viewed as three well-known spectral types. Compared with the existing numerical methods such as finite element method and finite difference method, spectral methods provide superior economical and accurate schemes when dealing with differential equations. The privilege of collocation methods over other spectral methods mainly reflects on solving of linear and nonlinear differential equations with accurate and efficient procedures, especially suitable for the numerical analysis of nonlinear problems. The orthogonal spline collocation method initially was proposed to investigate a m-order ordinary differential equation in De Boor and Swartz (1973) and considered to deal with various equations later. Collocation schemes based on Chebyshev polynomials (Ardabili and Talaei 2018; Babaei et al. 2020; Morgado et al. 2017; Nagy 2017), Legendre polynomials (Sharma et al. 2018; Yousefi et al. 2019), B-spline functions (Roul and Goura 2019; Singh et al. 2021) and Jacobi polynomials (Bhrawy et al. 2016a, b) have been frequently applied to approximate the solution of various types of differential equations and integral equations. Some of the recent studies on collocation methods are described as follows. Saw and Kumar (2021) proposed an efficient and accurate scheme based on Chebyshev collocation method and finite difference approximation to investigate time-fractional convection–diffusion equation and illustrated the convergence analysis. In Rahimkhani and Ordokhani (2019), 2D Bernoulli wavelets together with a fractional integral operator were applied to reduce two types of fractional partial differential equations to systems of algebraic equations which were solved by the Newton’s iterative method and the corresponding error estimate was presented in \(L^2\)-norm. Similarly, a nonlinear weakly singular partial integro-differential equation was investigated in Singh et al. (2018) and it was reduced to nonlinear system of algebraic equations by the operational matrix of integration of 2D Legendre wavelets. Roul et al. studied Bratu-type and Lane–Emden-type problems (Roul et al. 2019) with the optimal quartic B-spline collocation method and a class of nonlinear singular Lane-Emden type equations (Roul et al. 2019) with the optimal quintic spline function. They achieved optimal convergence of order six through imposing perturbation to the original problem while the normal quartic and quintic spline function just arrived at four order. Orthogonal polynomials were selected matching to their specific properties which construct them appropriate for the problem under investigation, like Fourier series (Arezoomandan and Soheili 2021) for periodic problems and Chebyshev and Legendre polynomials for non-periodic problems. The Chebyshev series expansion can be seen as a proper alternative to the Fourier basis in the form of cosine Fourier series especially dealing with Gibbs phenomenon at the boundaries (Rakhshan and Effati 2018). In addition, collocation methods have been successfully applied in magnetic field (Renu et al. 2021), heat transfer (Ma et al. 2017; Wang et al. 2017), radiative transfer (Li and Wei 2018), model of squeezing flow (Saadatmandi et al. 2016) and so on. For more information on collocation methods, the interested reader can refer to literatures (Hammad and El-Azab 2016; Baseri et al. 2018; Rohaninasab et al. 2018; Zaky and Ameen 2019) and the references contained therein.
In this paper, we apply Hermite piecewise-cubic polynomial to instruct the spectral collocation method, then we numerically solve Problem (1) by this spectral collocation method, which can transform the given differential equation to algebraic systems of equations with unknown coefficients. It is worthy noticing that the distinguishing advantage of collocation method over Galerkin finite element method reflects on no effort to compute integrals when setting up the corresponding algebraic system of equations. Since no integral need to be evaluated or approximated, the calculation of the coefficients determining the approximate solution is vary fast. Moreover, the operational matrices of proposed method are sparse ones, which make computation easy and quick. Also, unlike finite difference method, it yields continuous approximation to the solution with high-order accuracy. On the basis of the outstanding advantages of collocation method described above, we propose the continuous-time collocation and discrete-time collocation schemes for Problem (1) and discuss their convergence by means of equivalent schemes. We also achieve unconditional stability for continuous-time collocation scheme and some stability conditions for discrete-time collocation scheme with Fourier analysis method. The satisfactory results can be obtained only using a little number of nodes in numerical experiments, along with the comparisons with other existing numerical methods showing that the spectral collocation method possesses higher accuracy.
The rest of paper is structured as follows. Sect. 2 presents some important preliminaries which also includes reasons for locating two collocation points in per interval and bases of Hermite piecewise-cubic space. In Sect. 3, we start with the convergence analysis of continuous-time collocation scheme by means of its equivalent scheme with its corresponding inner product and obtain the corresponding convergence order. Moreover, we prove that this scheme is unconditional asymptotically stable. We analyze the convergence and stability of discrete-time collocation scheme in analogous with continuous-time one in Sect. 4. Some numerical experiments are provided to illustrate our theoretical analysis in Sect. 5 and the last section contains some conclusions.
2 Preliminaries
Definition 1
(Wiener 1993) A function u(x, t) is called a solution of Problem (1) if it satisfies the conditions:
-
(i)
u(x, t) is continuous in \(\Omega \times J\).
-
(ii)
\({\partial }^ku/\partial x^k\) and \({\partial }^ku/\partial t^k (k=1, 2)\) exist and are continuous in \(\Omega \times J\) with the possible exception of the points (x, n), where one-sided derivatives exist \((n=0, 1, 2, \cdots )\).
-
(iii)
u(x, t) satisfies \(u_{tt}(x,t)=a^2u_{xx}(x,t)+bu_{xx}(x,[t])\) in \(\Omega \times J\) with the possible exception of the points (x, n), and conditions \(u(x,0)=v(x), u_t(x,0)=w(x)\) in \(\Omega \) and \(u(x,t)=0\) on \(\partial \Omega \times J\).
Lemma 1
(Wiener 1993) The zero solution of Problem (1) is asymptotically stable if and only if
As we know, a collocation method is based on the principle of approximating the analytic solution of given equation with an appropriate function belonging to a chosen finite dimensional space, usually a piecewise polynomial which satisfies the equation exactly on a set of specific points (called the set of collocation points). In this paper, we will concern with the numerical solution of Problem (1) by a kind of particular method of collocation equipped with Hermite piecewise-cubic polynomials with respect to space variable x at each time t.
Let \(\delta =[x_0,x_1,\cdots ,x_N]\), where \( 0=x_0<x_1<\cdots <x_{N}=1\) denote the regular partitions of \(\Omega _i=[x_{i-1},x_i]\) with the steps \( h_i=x_i-x_{i-1}\) and \( h=\underset{1\le i\le N}{\max }(x_i-x_{i-1})\). Set time-size \(p=1/m \,( m\ge 1)\) and let \(S_{r-1}\) be the piecewise polynomial spline space
where \(P_{r-1}(\Omega _i)\) denotes the space of all (real) polynomials of degree no more than \(r-1\) when restricted to the set \(\Omega _i\). When \(r=4\), the space \(S_3\) is commonly known as Hermite piecewise-cubic space. The bases of the Hermite piecewise-cubic space are considered as follows
that is, \(S_3={\text {span}}[\phi _0,\varphi _0,\ldots ,\phi _N,\varphi _N]\) and \(\dim (S_3)=2N+2\). Therefore, we need \(2N+2\) relations to specify the numerical solution of Problem (1) at each time t. It’s obvious to see that the coefficient of \(\phi _0\) and \(\phi _N\) are 0 from the boundary conditions in Problem (1). For convenience, let
The method of collocation requires that the remaining relations should be obtained by having the differential equation satisfied at 2N points. Since there are N intervals \(\Omega _i\), two points are located in each interval subsequently. We choose the points in the following form
then \(x_{i-1}<\xi _{i,1}<\xi _{i,2}<x_i\).
We can denote a discrete inner product in \(C(\Omega )\) and its associated norm by
and
Let \(H^s(\Omega )\) be Sobolev space on \(\Omega \) and \(|\cdot |_s\) is the related norm. Define \(H^1_0=\{\phi \in H^1(\Omega ):\phi =0 \quad {\text {on}} \quad \partial \Omega \}\). \(H^1_0(\Omega )\) is the completion of \(C^{\infty }_0(\Omega )\) under \(L^2(\Omega )\)-norm \(\Vert \cdot \Vert \) and denote
where
By the Gauss type integration, we have
3 Continuous-time collocation method
The continuous-time approximation is a differentiable map \(U(t)=U(\cdot ,t) : {\bar{J}} \rightarrow S_3\), belonging to \(S_3\) for each t, such that
where \({\bar{v}},{\bar{w}}\) are the \(S_3\)-interpolation of v and w at the nodes \(\xi _{i,k}\), respectively.
It is useful to introduce a continuous time discrete Galerkin procedure, whose solution can be viewed as the solution of (12), that is
According to (Douglas and Dupont 1974, Lemma 4.1), we know that the collocation method (12) and the discrete Galerkin method (13) each posses a unique solution and these solutions are identical if the processes start from the same initial values.
We write Problem (1) in weak form: Finding u: \({\bar{J}}\rightarrow H_0^1\), application of Green’s formula to the second term and third term gives
from (11) and (13), (14) is equivalent to the following Galerkin type scheme
We introduce the Ritz projection \(R: H_0^1(\Omega )\rightarrow S_3\) as the orthogonal projection with respect to the inner product \((\nabla \varphi ,\nabla \chi )\), thus
Lemma 2
(Thomée 1986) For \(\varphi \in H^s\cap H_0^1\) and \(1\le s\le r\), if
holds, then we have
where C is a positive constant.
Since we discuss the test function in Hermite piecewise-cubic space, so let \(r=4\) in Lemma 2.
3.1 Convergence analysis
Theorem 1
Let u and U be the solutions of (1) and (12), respectively. For \(t\in [n,n+1)(n\in Z)\), if \(\Vert {\bar{v}}-v\Vert \le Ch^4\Vert v\Vert _4\) and \( \Vert {\bar{w}}-w\Vert \le Ch^4\Vert w\Vert _4\), then
where C(t) is a function of t.
Proof
From \(R(u)_{tt}=Ru_{tt}\) , (14) and (15) we have
Denote
then by (20) we get
Now, we begin to estimate \(\nu (t)\) and \(\mu (t)\). For \(\nu (t), t\in [n,n+1)\), by Lemma 2 we have
To estimate \(\mu (t)\), we begin with (22) by taking \(\chi =a^2\mu _t(t)+b\mu _t([t])\), so
further
then we derive
and
Integrating (27) from n to t, we get
then
by Schwarz–Cauchy inequality
Thus
Let \(\alpha =(a^2-|b|\delta _1)/2\) and make \(a^2-|b|\delta _1>0\) hold by \(\delta _1>0\), (31) turns into
Gronwall inequality implies that
For convenience, denoting
taking \(t=n+1\) we obtain
Furthermore, in view of (18) we have
and
then by (36) and (37), (35) gives
so
where C(t) is a function of \(t\in [n, n+1)\).
Therefore, if \(\Vert {\bar{w}}-w\Vert \le Ch^4\Vert w\Vert _4\), then
Due to
and
we get
Hence
So \(U(t)\rightarrow u(t)\) as \(h\rightarrow 0\). The proof is completed. \(\square \)
3.2 Stability analysis
In this subsection, we apply Fourier analysis method to discuss the numerical stability.
Definition 2
If any solution U(x, t) of (12) satisfies
then the zero solution of (12) is asymptotically stable.
Using the bases of space \(S_3^0\), we have
where \(\beta _j(t)\) are undetermined coefficients.
Let
substituting (47) into the equation in (12) yields
that is
where \(\zeta (t)=(\zeta _1(t), \zeta _2(t), \ldots , \zeta _{2N}(t))^{T}\).
For convenience, we introduce \(z(t)=\zeta ^{\prime }(t)\), so (49) reduces to
where
From (50) we obtain
where
Let \(t=n+1\), (53) gives
here M(1) is called as a growth matrix in Fourier analysis method, it is convenient to introduce the following lemma to verify \(\max |{\lambda _{M(1)}}|<1\).
Lemma 3
(Smith 1985) The sets of eigenvalues of the matrix Q consist of all the eigenvalues of the following family of matrices
Lemma 4
(Kosmala et al. 2000) The polynomial \(x^2-d_1x-d_2 (d_1, d_2\in {\mathbb {R}})\) is Schur polynomial if and only if \(|d_1|<1-d_2<2\).
Theorem 2
Under the condition (2), the zero solution of (12) is asymptotically stable.
Proof
By the Taylor expansion of matrix exponential, M(1) can be written in following fashion
From Lemma 3, the characteristic equation of M(1) is
where ac is the eigenvalue of acI.
Thus
It is easy to verify
and
Therefore, in view of Lemma 4 we get \(\max |\lambda _{M(1)}|<1\). The proof is finished. \(\square \)
4 Discrete-time collocation method
Let \(\{t_n\}\) be the uniform partition of [0, T] with \(t_n=np\) \((n=0,1,2,\cdots )\), \(U^n\) be the approximation in \(S_3\) of u(t) at \(t_n\) and denote \({\partial }_{tt}U^n=(U^{n+1}-2U^n+U^{n-1})/p^2\), then (1) can be written as
where \(U^{n,p}_{xx}\) denotes a given approximation to \(u_{xx}(x,[t_n]), n=1,2,3,\ldots \).
Using the similar technique as in Sect. 3.1 apply the central Euler Galerkin method to (1) gives
Let \(n=km+l, k=0,1,2,\ldots , l=1,2,\ldots , m\), then \(U^{n,p}\) can be written as \(U^{km}\) according to Definition 1. So (60) turns into
that is
4.1 Convergence analysis
Theorem 3
Let \(U^n\) and u be the solution of (59) and (1), respectively. If \(\Vert {\bar{v}}-v\Vert \le Ch^4\Vert v\Vert _4\), then
where C is a positive constant.
Proof
Similar to (20) and (21), from (14) and (61) we have
where
The following work mainly focuses on the estimates for \(\mu ^{km+l}\) and \(\nu ^{km+l}\). We notice that \(\nu ^{km+l}=\nu (t_{km+l})\) is bounded as claimed in (23), so we only to estimate \(\mu ^{km+l}\) as follows.
Substituting \(\chi =a^2(\mu ^{km+l+1}-\mu ^{km+l})+b\mu ^{km}\) into (64), Schwarz-Cauchy inequality gives
then we have
that is
From (68), we notice the items \(\Vert \nabla \left( \mu ^{km+l+1}-\mu ^{km+l}\right) \Vert ^2\), \(\Vert \nabla \mu ^{km+l}\Vert ^2\) and \(\Vert \nabla \mu ^{km}\Vert ^2\) should be estimated so that the recurrence relation between \(\left\| \mu ^{km+l+1}-\mu ^{km+l}\right\| \) and \(\left\| \mu ^{km+l}-\mu ^{km+l-1}\right\| \) can be obtained. Substituting \(\chi =\mu ^{km+l}\) and \(\chi =b\mu ^{km}\) into (64), respectively, we have
and
By Poincar\(\acute{e}\) inequality
we obtain the value range of \(\Vert \nabla \mu ^{km+l}\Vert ^2\) in (69) and \( \Vert \nabla \mu ^{km}\Vert ^2\) in (70) related to items
Moreover, subtracting \(a^2(\nabla \mu ^{km+l+1}, \nabla \chi )\) on both sides of (23) and taking \(\chi =\mu ^{km+l+1}+\mu ^{km+l}\) and \(\chi =\mu ^{km+l+1}-\mu ^{km+l}\), respectively, we derive
and
so the value range of item \(\Vert \nabla (\mu ^{km+l+1}-\mu ^{km+l})\Vert ^2 \) in (73) is related to items
And we can handle (73) and (74) with corresponding Poincar\(\acute{e}\) inequality like (69) and (70).
Based on the above discussion on \(\Vert \nabla (\mu ^{km+l+1}-\mu ^{km+l})\Vert ^2\), \(\Vert \nabla \mu ^{km+l}\Vert ^2\) and \(\Vert \nabla \mu ^{km}\Vert ^2\), (68) turns into
where \(r_1, r_2>0\) and they are determined by (68)–(71), (73) and (74).
Hence, we have
Denote
then (77) gives
here \(\mu ^{(0)}=\mu (0)\) is bounded as desired in (42). We notice that
so
Further
so
Thus together with (23) we have
Therefore, \( U^n \rightarrow u(t_n)\) as \(h\rightarrow 0\) and \(p \rightarrow 0\). This completes the proof. \(\square \)
4.2 Stability analysis
In this subsection, the stability of numerical scheme (59) is analyzed with Fourier analysis method in analogy with continuous-time collocation method.
Definition 3
If any solution \(U^n\) of (59) satisfies
then the zero solution of (59) is asymptotically stable.
Similar with (46) and (47), we take
where \(\beta _j^n\) are unknown coefficients and
and the first part of (59) can be written as
Since (87) holds for all \(k\ge 1\), we derive that
Let \(z_j^{km+l+1}=\zeta _j^{km+l}\) and \(W^{km+l+1}=(\zeta _j^{km+l+1}, z_j^{km+l+1})^T\), so (88) becomes
where
Therefore, from (89) we derive
that is
where \(M=C^{m}+(C^{m}-I)(C-I)^{-1}D.\)
Theorem 4
Under the condition (2), if
for m is even or
for m is odd, then the zero solution of (59) is asymptotically stable.
Proof
As we know, the zero solution of (59) is asymptotically stable if and only if the eigenvalue of growth matrix satisfies \(\max |\lambda _{M}|<1\), where M is defined in (92). From Lemma 3 we know the eigenvalues of C consist of the roots of the following equation
It is worthy noticing that neither \(\lambda =0\) nor \(\lambda =1\) is the root of (95). For convenience, denote
so the symmetry axis of \(f(\lambda )\) is
-
(i)
When m is even, we can obtain \(f({\bar{\lambda }})<0\) from \(p^2> \min \left\{ \frac{4}{a^2c^2}\right\} \), while \( f(0)=1>0\) and \( f(1)=a^2c^2p^2>0\) hold. In addition, \( p^2< \max \left\{ \frac{4}{a^2c^2}\right\} \) guarantees \(f(-1)>0\) so the root of (95) exists in (0,1) and \((-1,0)\). Therefore, we get \(0<|\lambda |<1\).
-
(ii)
When m is odd, from (94) we get \(f({\bar{\lambda }})<0\) which implies the root of (95) lies in (0, 1). Hence, we obtain \(0<\lambda <1\).
Further, we obtain the eigenvalues of \((C-I)^{-1}D\) are \(\lambda _1=0\) and \(\lambda _2=b/a^2\). Therefore, we have
which completes the proof. \(\square \)
5 Numerical experiments
In this section, we present some numerical simulations based on Hermite piecewise-cubic polynomials to verify the corresponding theoretical results.
Consider the following problem
It is easy to check that condition (2) holds. Moreover, according to the method of separation of variables, we obtain the analytic solutions of (97) is the first component of
where \( b_1=(1,0)^{T}\) and
in fact, when t is an integer, \({\widetilde{u}}(x,t)= \sin (\pi x)(G(1))^{t}b_1\).
Since \(\phi _i(0)=\phi _i(1)=0\), substituting
and
into (12) and (59), respectively, where \(\beta _i(t)\) and \(\beta _i^n\) are undetermined coefficients, then we obtain the continuous-time collocation scheme
and the discrete-time collocation scheme
where the coefficient matrices \(B_1=(\Phi _j(\xi _{i,k_1}))\) and \(B_2=(\Phi _j^{''}(\xi _{i,k_1}))\) are following almost block diagonal form with dimension 2N
here
In continuous-time collocation scheme and discrete-time collocation scheme, the order of convergence is defined as
where \(AE_*(h_i)\) is the error calculated in \(L^{\infty }\) norm and \(L^2\) norm by the following formulas when taking step-size \(h_i\) and \(*\) represents 2-norm or \(\infty \)-norm:
For convenience, we take spatial step \(h=1/N\). Firstly, we consider the case of continuous-time collocation scheme. In Table 1 and Table 2 we list \(AE_{*}\) in different norms and their order of convergence for different h, respectively. From these Tables we can see that the continuous-time collocation scheme has a good convergence, which validates the theoretical results in Theorem 1. Moreover, in Figs. 1 and 2 we plot the numerical solutions of the continuous-time collocation scheme. These two figures illustrate that the continuous-time collocation scheme can achieve unconditional stability, which coincides Theorem 2 well.

The continuous-time collocation numerical solutions of Problem (97) with \(N = 40\)

The continuous-time collocation numerical solutions of Problem (97) with \(N = 70\)

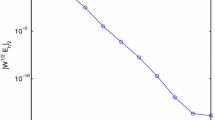
Error curve for three methods at (1/4,2)

Error curve for three methods at (1/2,3)
Secondly, we consider the case of the discrete-time collocation scheme. We choose the time step \(p=1/N^4\) as we expect to obtain one-order accuracy in time direction and four-order accuracy in space direction, respectively. The \(AE_{*}\) in two norms and their order of convergence of the discrete-time collocation scheme at \(t=2\) and \(t=3\) are shown in Table 3 and Table 4, which are in accordance with Theorem 3. Moreover, what are shown in Table 5 and Table 6 are comparisons of the absolute error (AE) between numerical solution and analytic solution with the discrete-time collocation scheme (DTCS), finite element method (FEM) (Liang et al. 2010b) and Crank-Nicolson method (CNM) by different spatial steps and time steps. Meanwhile, the comparison results are plotted in Figs. 3 and 4 either. It is not difficult to see that the AE of discrete-time collocation scheme is relatively smaller than those of finite element method and Crank-Nicolson method for the same step-size and the discrete-time collocation scheme can achieve same error magnitude with lower computational cost than other methods, which can reflect that the discrete-time collocation scheme possesses better accuracy. Further, Figs. 5 and 6 are presented to describe the stability of numerical solution under the discrete-time situation by different time steps. The two figures are in accordance with Theorem 4. Some detailed analysis are presented as follows.

The discrete-time collocation numerical solutions of Problem (97) with \(N =10\), \(m=120\)

The discrete-time collocation numerical solutions of Problem (97) with \(N =15\), \(m =180\)
When \(N=10, m=120\) and \(N=15, m=180\), then
and
that is, (93) and (94) hold. So the numerical solutions of Problem (97) are asymptotically stable.
6 Conclusions
The spectral collocation method is proposed to deal with hyperbolic PEPCA in this paper. We choose Hermite piecewise-cubic function as test function, which has been verified to be effective for approximation in numerical experiments. The error estimations for both continuous-time and discrete-time collocation schemes are obtained by means of equivalent schemes. The stability analysis for the two schemes are also conducted with Fourier analysis method. We present some numerical experiments to illustrate the accuracy of schemes. The advantage of spectral collocation method is that it can achieve higher approximate accuracy with less nodes compared with FEM and CNM. In our future work, we will deal with the multidimensional and nonlinear problems.
References
Aftabizadeh AR, Wiener J (1986) Oscillatory and periodic solutions of an equation alternately of retarded and advanced type. Appl Anal 23(3):219–231
Ardabili JS, Talaei Y (2018) Chebyshev collocation method for solving the two-dimensional Fredholm-Volterra integral equations. Int J Appl Comput Math 4(1):1–13
Arezoomandan M, Soheili AR (2021) Spectral collocation method for stochastic partial differential equations with fractional Brownian motion. J Comput Appl Math 389:113369
Babaei A, Jafari H, Banihashemi S (2020) Numerical solution of variable order fractional nonlinear quadratic integro-differential equations based on the sixth-kind Chebyshev collocation method. J Comput Appl Math 377:112908
Baseri A, Abbasbandy S, Babolian E (2018) A collocation method for fractional diffusion equation in a long time with Chebyshev functions. Appl Math Comput 322:55–65
Bereketoglu H, Lafci M (2017) Behavior of the solutions of a partial differential equation with a piecewise constant argument. Filomat 31(19):5931–5943
Bhrawy AH, Alzaidy JF, Abdelkawy MA, Biswas A (2016) Jacobi spectral collocation approximation for multi-dimensional time-fractional Schrödinger equations. Nonlinear Dyn 84(3):1553–1567
Bhrawy AH, Doha EH, Abdelkawy MA, Gorder RAV (2016) Jacobi-Gauss-Lobatto collocation method for solving nonlinear reaction-diffusion equations subject to Dirichlet boundary conditions. Appl Math Model 40(3):1703–1716
Cavalli F, Naimzada A (2016) A multiscale time model with piecewise constant argument for a boundedly rational monopolist. J Diff Equ Appl 22(10):1480–1489
De Boor C, Swartz B (1973) Collocation at Gaussian points. SIAM J Numer Anal 10(4):582–606
Douglas J, Dupont T (1974) Collocation methods for parabolic equations in a single space variable. Springer, New York
Gao JF (2017) Numerical oscillation and non-oscillation for differential equation with piecewise continuous arguments of mixed type. Appl Math Comput 299:16–27
Hammad DA, El-Azab MS (2016) Chebyshev-Chebyshev spectral collocation method for solving the generalized regularized long wave (GRLW) equation. Appl Math Comput 285:228–240
Karakoc F (2017) Asymptotic behaviour of a population model with piecewise constant argument. Appl Math Lett 70:7–13
Kartal S, Gurcan F (2015) Stability and bifurcations analysis of a competition model with piecewise constant arguments. Math Method Appl Sci 38(9):1855–1866
Kosmala WA, Kulenović MRS, Ladas G, Teixeira CT (2000) On the recursive sequence \(y_{n+1}=(p+ y_{n-1})/(qy_n+ y_{n-1})\). J Math Anal Appl 251(2):571–586
Li G, Wei LY (2018) Chebyshev collocation spectral method for radiative transfer in participating media with variable physical properties. Infrared Phys Techn 88:48–56
Liang H, Liu MZ, Lv WJ (2010) Stability of \(\theta \)-schemes in the numerical solution of a partial differential equation with piecewise continuous arguments. Appl Math Lett 23(2):198–206
Liang H, Shi DY, Lv WJ (2010) Convergence and asymptotic stability of Galerkin methods for a partial differential equation with piecewise constant argument. Appl Math Comput 217(2):854–860
Liu X, Zeng YM (2018) Linear multistep methods for impulsive delay differential equations. Appl Math Comput 321:555–563
Ma J, Sun Y, Li B (2017) Spectral collocation method for transient thermal analysis of coupled conductive, convective and radiative heat transfer in the moving plate with temperature dependent properties and heat generation. Int J Heat Mass Transf 114:469–482
Milošević M (2016) The Euler-Maruyama approximation of solutions to stochastic differential equations with piecewise constant arguments. J Comput Appl Math 298:1–12
Morgado ML, Rebelo M, Ferrás LL, Ford NJ (2017) Numerical solution for diffusion equations with distributed order in time using a Chebyshev collocation method. Appl Numer Math 114:108–123
Nagy AM (2017) Numerical solution of time fractional nonlinear Klein-Gordon equation using Sinc-Chebyshev collocation method. Appl Math Comput 310:139–148
Rahimkhani P, Ordokhani Y (2019) A numerical scheme based on Bernoulli wavelets and collocation method for solving fractional partial differential equations with Dirichlet boundary conditions. Numer Meth Part D E 35(1):34–59
Rakhshan SA, Effati S (2018) The Laplace-collocation method for solving fractional differential equations and a class of fractional optimal control problems. Optim Contr Appl Met 39(2):1110–1129
Renu K, Kumar A, Negi AS (2021) Chebyshev spectral collocation method for magneto micro-polar convective flow through vertical porous pipe using local thermal non-equilibrium approach. Int J Appl Comput Math 7(3):1–21
Rohaninasab N, Maleknejad K, Ezzati R (2018) Numerical solution of high-order Volterra-Fredholm integro-differential equations by using Legendre collocation method. Appl Math Comput 328:171–188
Roul P, Goura PVMK (2019) B-spline collocation methods and their convergence for a class of nonlinear derivative dependent singular boundary value problems. Appl Math Comput 341:428–450
Roul P, Thula K, Goura VMKP (2019) An optimal sixth-order quartic B-spline collocation method for solving Bratu-type and Lane-Emden-type problems. Math Meth Appl Sci 42(8):2613–2630
Roul P, Thula K, Agarwal R (2019) Non-optimal fourth-order and optimal sixth-order B-spline collocation methods for Lane-Emden boundary value problems. Appl Numer Math 145:42–360
Saadatmandi A, Asadi A, Eftekhari A (2016) Collocation method using quintic B-spline and sinc functions for solving a model of squeezing flow between two infinite plates. Int J Comput Math 93(11):1921–1936
Saw V, Kumar S (2021) The Chebyshev collocation method for a class of time fractional convection-diffusion equation with variable coefficients. Math Meth Appl Sci 44(8):6666–6678
Sharma S, Pandey RK, Kumar K (2018) Collocation method with convergence for generalized fractional integro-differential equations. J Comput Appl Math 342:419–430
Singh S, Patel VK, Singh VK (2018) Convergence rate of collocation method based on wavelet for nonlinear weakly singular partial integro-differential equation arising from viscoelasticity. Numer Meth Part D E 34(5):1781–1798
Singh S, Singh S, Aggarwal A (2021) Fourth-order cubic B-spline collocation method for hyperbolic telegraph equation. Math Sci 2021:1–12
Smith GD (1985) Numerical solution of partial differential equations: finite difference methods. Oxford University Press, Oxford
Thomée V (1986) Galerkin finite element methods for parabolic problems. Springer, New York
Wang Q (2017) Stability analysis of parabolic partial differential equations with piecewise continuous arguments. Numer Meth For Part D E 33(2):531–545
Wang Q, Wang XM (2018) Runge-Kutta methods for systems of differential equation with piecewise continuous arguments: convergence and stability. Numer Func Anal Opt 39(7):784–799
Wang Q, Wang XM (2019) Stability of \(\theta \)-schemes for partial differential equations with piecewise constant arguments of alternately retarded and advanced type. Int J Comput Math 96(12):2352–2370
Wang Q, Wen JC (2014) Analytical and numerical stability of partial differential equations with piecewise constant arguments. Numer Meth Part D E 30(1):1–16
Wang Q, Zhu QY, Liu MZ (2011) Stability and oscillations of numerical solutions for differential equations with piecewise continuous arguments of alternately advanced and retarded type. J Comput Appl Math 235(5):1542–1552
Wang C, Qiu Z, Xu M (2017) Collocation methods for fuzzy uncertainty propagation in heat conduction problem. Int J Heat Mass Transf 107:631–639
Wiener J (1993) Generalized solutions of functional differential equations. World Scientific, Singapore
Wiener J, Debnath L (1992) A wave equation with discontinuous time delay. Int J Math Math Sci 15(4):781–788
Wiener J, Debnath L (1997) Boundary value problems for the diffusion equation with piecewise continuous time delay. Int J Math Math Sci 20(1):187–195
Wiener J, Heller W (1986) Oscillatory and periodic solutions to a diffusion equation of neutral type. Int J Math Math Sci 22(2):313–348
Yousefi A, Javadi S, Babolian E (2019) A computational approach for solving fractional integral equations based on Legendre collocation method. Math Sci 13(3):231–240
Zaky MA, Ameen IG (2019) On the rate of convergence of spectral collocation methods for nonlinear multi-order fractional initial value problems. Comput Appl Math 38(3):1–27
Zhang CJ, Wang WS, Liu BC, Qin TT (2018) A multi-domain Legendre spectral collocation method for nonlinear neutral equations with piecewise continuous argument. Int J Comput Math 95(12):2419–2432
Acknowledgements
This work is supported by the National Natural Science Foundation of China (no. 11201084).
Author information
Authors and Affiliations
Contributions
They contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Communicated by Cassio Oishi.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chen, Y., Wang, Q. Convergence and stability of spectral collocation method for hyperbolic partial differential equation with piecewise continuous arguments. Comp. Appl. Math. 41, 387 (2022). https://doi.org/10.1007/s40314-022-02106-8
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-022-02106-8
Keywords
- Hyperbolic partial differential equation
- Piecewise continuous arguments
- Spectral collocation method
- Convergence
- Stability