
Abstract
The study deals with an initial-value problem for a singularly perturbed nonlinear Fredholm integro-differential equation. Parameter explicit theoretical bounds on the continuous solution and its derivative are derived. To solve the approximate solution to this problem, a new difference scheme is constructed with the finite difference method by using the interpolated quadrature rules with the remaining terms in integral form. Parameter uniform error estimates for the approximate solution are established. It is proved that the method converges in the discrete maximum norm, uniformly with respect to the perturbation parameter. Numerical results are given to illustrate the parameter-uniform convergence of the numerical approximations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Fredholm integro-differential equations (FIDEs) serve as mathematical models in many fields of science and engineering. FIDEs arise in fluid dynamics, physics, electro dynamics of complex medium, economics, biological models, epidemic models, many models of population growth, neural network modeling, oscillation theory, astronomy, chemistry, heat and mass transfer, theory of elasticity (Amiraliyev et al. 2020; Emamzadeh and Kajani 2010; Jerri 1999). In general, it is usually quite difficult to obtain exact solution of FIDEs. Because of this reason we need suitable discretization methods with high accuracy for solving FIDEs.
In this work, we deal with a singularly perturbed nonlinear Fredholm integro-differential equation (SPNFIDE) as follows:
where \(0<\varepsilon<<1\) is the perturbation parameter, A is given constant, \(\lambda \) is a real parameter, \(f(t,u)((t,u)\in {\overline{I}}\times R)\) and \(K(t,s,u(s))((t,s,u)\in {\overline{I}}\times {\overline{I}}\times R)\) are sufficiently smooth functions, \({\overline{I}}=[0,T]\). Furthermore,
Under these assumptions, there exist a unique solution u to problem (1)–(2). Besides, the existence and uniqueness studies of the solutions of nonlinear FIDEs can be found in Jerri (1999), O’Regan and Meehan (1998) and reference therein.
Singularly perturbed problems involve a small perturbation parameter, \(\varepsilon \) multiplied with the highest-order derivative terms. Such problems arise in applications of mathematics to problems in numerous fields of sciences and engineering. Theory of plates, semi-conductor device models, fluid mechanics, in fluid flow at high Reynolds number, quantum mechanics, reaction–diffusion processes, elasticity, etc. are among these. Due to the presence of boundary layers, the solution of these types of problems vary suddenly in boundary layers when \(\varepsilon \) approaches zero. In regions outside the layers, the solution behaviors regularly and varies slowly (Cakir and Arslan 2021; Cimen and Cakir 2017; Doolan et al. 1980; Farell et al. 2000; Miller et al. 2012; Nayfeh 1993; O’Malley 1991; Roos et al. 2008).
In the last decades, there has received much attention in the numerical solution of integral equations. In literature, there are many different numerical models to solve such equations. Ebrahimi and Rashidina (Ebrahimi and Rashidinia 2015) presented a collocation method for solving linear and nonlinear Fredholm and Volterra integral equations, using the globally defined B-spline and auxiliary basis functions. Wang et al. Wang et al. (2019) studied on numerical solution of integro-differential equations of high-order Fredholm by the simplified reproducing kernel method. Maleknejad and Attary Maleknejad and Attary (2011) given Cattani’s method based on the collocation approach for solving linear FIDEs. Emamzadeh and Kajani Emamzadeh and Kajani (2010) proposed a numerical approach to solve the nonlinear Fredholm integral equations of the second kind. Najafi Najafi (2020) introduced Nyström-quasilinearization method for solving nonlinear weakly singular Fredholm integral equations. Asgari et al. Asgari et al. (2019) studied on an iterative method to solve one- and two-dimensional linear Fredholm integral equations.
The above-mentioned articles, related to Fredholm integral equations were only concerned with the regular cases (i.e., when the boundary layers are absent). Studies on singularly perturbed Fredholm integro-differential equations (SPFIDEs) have attracted attention in recent years (Amiraliyev et al. 2018, 2020; Cimen and Cakir 2021; Durmaz and Amiraliyev 2021). However, although there are many studies on linear SPFIDEs in the literature, we could not find any studies on nonlinear SPFIDEs. These gaps in the literature are the motivation for our study. In addition, methods such as Reproducing kernel method, Fourier spectral method and Barycentric interpolation collocation method presented for the solution of the nonlinear singularly perturbed problems have recently attracted attention (Han and Wang 2022; Han et al. 2022; Liu et al. 2018).
In this article, we try to develop an efficient fitted difference scheme on Shishkin mesh for the numerical solution of the problem (1)–(2). The difference scheme is constructed by the method of integral identities with the use of appropriate interpolating quadrature rules with remainder terms in integral form.
The outline of the paper is organized as follows. In Sect. 2, we indicate the asymptotic behavior of the exact solution and its derivative. In Sect. 3, we construct the finite difference method and describe a special piecewise uniform mesh. Convergence and error analysis of the difference discretization are presented in Sect. 4. Some numerical examples are given in Sect. 5, which demonstrate the efficiency and the proposed method.
Throughout the paper, C denotes a generic positive constant. Some specific, fixed constants of this kind are indicated by subscripting C. For any continuous function g(t), we use \(\left\| g\right\| _{\infty }\) for the continuous maximum norm on the corresponding interval.
2 Bound of the exact solution and its derivative
In this section, we give bound of the exact solution and its derivative, which are needed in later sections for the analysis of appropriate numerical solution.
Lemma 1
Suppose that the following assumptions are fulfilled
and
Then, the solution u(t) of the problem (1)–(2) satisfies the estimates
and
where
Proof
We first prove (4). Applying the mean value theorem to the functions in (1), we have
where
From the Eq. (6), we can write the following form:
From here, we take
which proves (6).
To prove (5), differentiating Eq. (1) we have
where
and
From the relations (3) and (4), we have
Using (1), we can obtain
It follows from (7) that
Thus we arrive at (5). \(\square \)
3 Discretization and Mesh
To give an approximation of the (1)–(2), we integrate (1) over \((t_{i-1},t_{i})\):
where \(u_{{\overline{t}},i}=(u_{i}-u_{i-1})/h_{i}\), \(u_{i}=u(t_{i})\) and \(h_{i}=t_{i}-t_{i-1}\) for \(1\le i\le N\).
If integration by parts is applied to identity (10), we then obtain the relation
where the remainder terms are
and
For integral term involving kernel function, using the composite right-side rectangle rule, we obtain the relation as follows:
with
By the relations (10), (11) and (14) for \(u(t_{i})\), we get the following exact relation:
where the remainder term \(R_{i}\) is defined by
Neglecting \(R_{i}\) in (16), we may suggest the following difference scheme for approximating (1)–(2):
The difference scheme (19)–(20) to be \(\varepsilon \)-uniformly convergent in what follows we will use the fitted piecewise uniform mesh (Shishkin type mesh). For the even number N, Shishkin-type mesh divides each of the interval \(\left[ 0,\sigma \right] \) and \(\left[ \sigma ,T\right] \) into N/2 equidistant subintervals. The transition point \(\sigma \) which separates of fine and coarse portions of the mesh is defined by
We denote the stepsizes in there subintervals as follows:
The mesh points of \(\omega _{N}\) are being defined by
and \({\overline{\omega }}_{N}=\omega _{N}\cup \left\{ t_{0}=0\right\} .\)
4 Uniform error estimates
To investigate the convergence of the method, note that \(z_{i}=y_{i}-u_{i}\) \((0\le i\le N)\) is the solution of the following discrete problem:
Lemma 2
Under the conditions of Lemma 1, for the remainder term \(R_{i}\) of the scheme (19)–(20), the estimate
holds.
Proof
We first consider the relation (12). Taking into account (4) and (5) in (12), then we have the inequality
Next we analyze the relation (13). Taking into account (4) in (13), we get the inequality
Finally, we denote the relation (15). By (4) and (5) in (15), we can write the following inequality:
Thus, substituting the inequalities (24), (25) and (26) in (18), we obtain
In the first case, we consider that \(\sigma =\frac{T}{2},\) \(\frac{T}{2} <\alpha ^{-1}\varepsilon \ln N\) and \(h=H=TN^{-1}\). From (27) we take
It follows from (28) that
In the second case, we consider \(\sigma =\alpha ^{-1}\varepsilon \ln N\), and so \(\alpha ^{-1}\varepsilon \ln N<\frac{T}{2}.\) We estimate \(R_{i}\) on \(\left[ 0,\sigma \right] \) and \(\left[ \sigma ,T\right] \), separately. In the boundary layers \(\left[ 0,\sigma \right] \), inequality (27) reduces to
Hence,
We now estimate the remainder term \(R_{i}\) in the region \(\left[ \sigma ,T\right] \). From (27), we take
Taking into account (5) here, we have
Since
we obtain
and
Substituting (32) and (33) into (31), we have
Hence, it follows that
Combining the estimates (29), (30) and (34), we arrive at (23). \(\square \)
Lemma 3
If we assume the condition
then for the solution of the difference problem (21)–(22) the following estimate holds:
Proof
Applying the mean value theorem to function in (21), we get
where
and
According to maximum principle for the operator \(\varepsilon z_{\overline{t},i}+a_{i}z_{i}\), we can write
which immediately lead to (35). \(\square \)
Finally, we obtain the main results for this work.
Theorem 1
Under the conditions of Lemma 1, the solution of (1 )–(2) and the solution (13)–(14) satisfy the estimate
Proof
Combining the previous lemmas, we immediately arrive at (36). \(\square \)
5 Algorithm and numerical results
5.1 Algorithm
In this section, we present the following iterative technique for solving nonlinear problem (19)–(20).
where
\(n=1,2,\ldots ,\) and \(y_{i}^{(0)}\) is given.

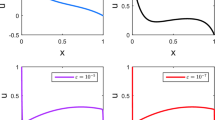
Numerical results of test problem for \(N=64\) and \(\varepsilon =2^{-4}\)

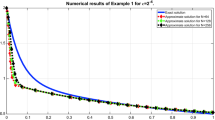
Numerical results of test problem for \(N=256\) and various \(\varepsilon \)

Maximum point-wise errors of log–log plot for test problem
5.2 Numerical example
We consider SPNFIDE in the form:
As the exact solution u(t) of this problem unknown. Therefore, we use the double-mesh principle to approximate the maximum errors on our mesh \({\overline{\omega }}_{N}\). That is, we compare the computed solutions with the solution on a mesh that is twice as fine (Doolan et al. 1980; Farell et al. 2000). The initial guess used here is taken as \(y_{i}^{(0)}=1-e^{-t_{i}}\) and the number of iterations n is chosen such that
The two mesh difference is denoted by
where \({\widetilde{y}}^{\varepsilon ,2N}\) is the numerical which comprises points of the original mesh \(t_{i}\in \omega _{N}\) and their midpoints \(t_{i+1/2} =(t_{i}+t_{i+1})/2\), \(i=0,1,\ldots ,N-1\).
Thus, the maximum errors are taken as
In addition, the orders of convergence and the \(\varepsilon \)-uniform rates of convergence are defined as
The resulting errors \(e^{\varepsilon ,N}\)and the orders of convergence \(p^{\varepsilon ,N}\) for particular values of \(\varepsilon \) and N, are listed in the Table 1.
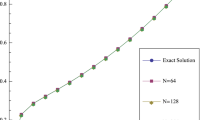
To validate the applicability of the method, one test problem is considered for numerical experimentation for different values of the perturbation parameter and mesh points. The numerical results are listed in terms of the approximate errors, the rates of convergence (see Table 1). Further, behavior of the numerical solution (see Figs. 1, 2) and the \(\varepsilon \)-uniform convergence of the method is shown by the log-log plot (see Fig. 3). From the results in the table, we observe that the maximum pointwise errors (\({e^{N}}\)) decreases monotonically and the rates of convergence (\({p^{N}}\)) increases monotonically when the number of mesh points (N) increases. From Figs. 1 and 2, we observe that the solution of the example exhibit a boundary layer \(t = 0\). And from Fig. 3, we notice that the maximum pointwise errors are bounded by \(O(N^{-1}lnN)\), which is proved in Theorem 1.
6 Conclusion
The singularly perturbed initial-value problem for a nonlinear first-order Fredholm integro-differential equation is considered. To solve this problem, a fitted difference scheme on a piecewise uniform mesh was presented. First order convergence except for a logarithmic factor, in the discrete maximum norm, independently of the perturbation parameter was obtained. The computed errors and rates of convergence were displayed in Table 1 and plotted Figs. 1, 2, 3 for the considered test problem, which supported of the theoretical results. These results showed that the presented method was effective and accuracy. We point out that the presented method in this article can be extended to other type of initial or boundary value problems such as nonlinear SPFIDEs, reaction diffusion SPFIDEs.
Data availability
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
References
Amiraliyev GM, Durmaz ME, Kudu M (2018) Uniform convergence results for singularly perturbed Fredholm integro-differential equation. J Math Anal 9(6):55–64
Amiraliyev GM, Durmaz ME, Kudu M (2020) Fitted second order numerical method for a singularly perturbed Fredholm integro-differential equation. Bull Belg Math Soc Simon Stevin 27:71–78
Asgari Z, Toutounian F, Babolian E, Tohidi E (2019) LSMR iterative method for solving one-and two-dimensional linear Fredholm integral equations. Comput Appl Math 38:1–16
Cakir M, Arslan D (2021) A new numerical approach for a singularly perturbed problem with two integral boundary conditions. Comput Appl Math 40:1–16
Cimen E, Cakir M (2017) Numerical treatment of nonlocal boundary value problem with layer behaviour. Bull Belg Math Soc Simon Stevin 24:339–352
Cimen E, Cakir M (2021) A uniform numerical method for solving singularly perturbed Fredholm integro-differential problem. Comput Appl Math 40:1–14
Doolan ER, Miller JJH, Schilders WHA (1980) Uniform numerical methods for problems with initial and boundary layers. Boole Press, Dublin
Durmaz ME, Amiraliyev GM (2021) A robust numerical method for a singularly perturbed Fredholm integro-differential equation. Mediterr J Math 18:1–17
Ebrahimi N, Rashidinia J (2015) Collocation method for linear and nonlinear Fredholm and Volterra integral equations. Appl Math Comput 270:156–164
Emamzadeh MJ, Kajani MT (2010) Nonlinear Fredholm integral equations of the second kind with quadrature methods. J Math Ext 4:51–58
Farell PA, Hegarty AF, Miller JJH, O’Riordan E, Shishkin GI (2000) Robust computational techniques for boundary layers. Chapman Hall/CRC, New York
Han C, Wang YL, Li ZY (2022) A high-precision numerical approach to solving space fractional gray-scott model. Appl Math Lett 125(107759):1–7
Han C, Wang YL (2022) Numerical solutions of variable-coefficient fractional-in-space kdv equation with the caputo fractional derivative. Fractal Fract 6(4, 207):1–28
Jerri A (1999) Introduction to integral equations with applications. Wiley, New York
Liu F, Wang Y, Li S (2018) Barycentric interpolation collocation method for solving the coupled viscous burger’s equations. Int J Comput Math 95(11):2162–2173
Maleknejad K, Attary M (2011) An efficient numerical approximation for the linear class of Fredholm integro-differential equations based on cattani’s method. Commun Nonlinear Sci Numer Simul 16:2672–2679
Miller JJH, O’Riordan E, Shishkin GI (2012) Fitted numerical methods for singular perturbation problems. Rev. Edt. World Scientific, Singapore
Najafi E (2020) Nystrom-quasilinearization method and smoothing transformation for the numerical solution of nonlinear weakly singular Fredholm integral equations. J Comput Appl Math 368:112–138
Nayfeh AH (1993) Introduction to perturbation techniques. Wiley, New York
O’Malley RE (1991) Singular perturbation methods for ordinary differential equations. Springer, New York
O’Regan D, Meehan M (1998) Existence theory for nonlinear integral and integrodifferential equations. Springer, Dordrecht
Roos HG, Stynes M, Tobiska L (2008) Robust numerical methods singularly perturbed differential equations. Springer, Berlin
Wang YL, Liu Y, Li ZY, Zhang HL (2019) Numerical solution of integro-differential equations of high-order Fredholm by the simplified reproducing kernel method. Int J Comput Math 96:585–593
Acknowledgements
The authors are grateful in advance to the referees and the editors for their valuable comments and suggestions which helped to improve the quality of manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Communicated by Hui Liang.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Cakir, M., Ekinci, Y. & Cimen, E. A numerical approach for solving nonlinear Fredholm integro-differential equation with boundary layer. Comp. Appl. Math. 41, 259 (2022). https://doi.org/10.1007/s40314-022-01933-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-022-01933-z
Keywords
- Singular perturbation
- Initial-value problem
- Fredholm integro-differential equation
- Uniform convergence
- Shishkin mesh